Устройство адаптивного управления станком
Изобретение относится к автоматическому управлению и регулированию на металлорежущих станках и может быть использовано для построения системы управления станком с применением данных о величине активной мощности электродвигателем главного движения, потребляемой в процессе резания, временные рамки которого определяются с помощью сигнала вибрации.
Из уровня техники известно устройство для контроля нагрузки на инструмент, содержащее датчик тока, управляемый элемент памяти, блок вычитания, компаратор, блок управления, задатчик и датчик рабочей подачи инструмента (Авторское свидетельство СССР №2023568, МПК B23Q 15/0, 1994 г.).
Известное устройство измеряет величину потребляемого тока электродвигателем привода инструмента и при превышении разности текущего значения тока и предельного его значения, соответствующего определенному моменту резания заданной величины, определяет момент возникновения недопустимой нагрузки, причем момент возникновения недопустимой нагрузки определяет момент начала резания.
К недостаткам данного устройства следует отнести то, что при его использовании совместно с преобразователями частоты, которые в настоящее время являются самыми распространенными силовыми преобразователями для управления электродвигателями, значение тока изменяется нелинейно, в то время как активная мощность пропорциональна нагрузке на валу электродвигателя. Поэтому данное устройство может быть использовано только для ограниченного диапазона нагрузки.
Наиболее близким решением из уровня техники по технической сущности, назначению и достигаемому результату является устройство адаптивного управления станком, оснащенным электродвигателем и рабочим столом, содержащее предназначенные для установки на статоре электродвигателя датчики тока и напряжения, предназначенный для установки на валу электродвигателя датчик скорости вращения электродвигателя, мультиплексор, входы которого соединены с выходами датчика тока, датчика напряжения и датчика скорости вращения электродвигателя, а выход - со входом выполненного в виде микроконтроллера аналого-цифрового преобразователя, последовательно соединенного с арифметическим устройством со входами и выходами, один из выходов которого соединен со входом задатчика частоты вращения вала электродвигателя, а второй выход - со входом выполненного в виде запоминающего устройства управляемого элемента памяти (Патент РФ №2481183 ИЗ, МПК B23Q 15/00, 2011 г.).
Известное устройство измеряет величину напряжения и потребляемого тока электродвигателем главного движения, вычисляет активную мощность потребляемого тока электродвигателем привода инструмента и при превышении разности, заданного и вычисленного значений активной мощности, формирует сигнал, пропорциональный скорости вращения вала электродвигателя главного движения.
К недостаткам данного устройства следует отнести, что при обработке сложнопрофильных деталей, а также при получистовых и чистовых операциях сигнал активной мощности может быть прерывистым и/или малозаметным на фоне сигнала активной мощности при холостом ходе. Поэтому данное устройство может быть использовано только для обработки деталей простой формы и/или при черновой обработке.
Задачей, на решение которой направлено заявленное изобретение, является оптимизация работы электродвигателя главного движения металлорежущего станка и системы адаптивного управления этим двигателем посредством регистрации и контроля активной мощности, пропорциональной нагрузке на валу электродвигателя, совместно с регистрацией вибрации станка и автоматического управления скоростью вращения электродвигателя и подачей режущего инструмента.
Технический результат - повышение эффективности путем оптимизации работы электродвигателя главного движения металлорежущего станка.
Поставленная задача решается, а технический результат достигается тем, что устройство адаптивного управления станком, оснащенным электродвигателем и рабочим столом, содержащее предназначенные для установки на статоре электродвигателя датчики тока и напряжения, предназначенный для установки на валу электродвигателя датчик скорости вращения электродвигателя, мультиплексор, входы которого соединены с выходами датчика тока, датчика напряжения и датчика скорости вращения электродвигателя, а выход - со входом аналого-цифрового преобразователя, последовательно соединенного с выполненным в виде микроконтроллера арифметическим устройством со входами и выходами, один из выходов которого соединен со входом задатчика частоты вращения вала электродвигателя, а второй выход - со входом выполненного в виде запоминающего устройства управляемого элемента памяти, дополнительно содержит предназначенный для установки на рабочем столе станка датчик вибрации с выходом, детектор со входом и выходом, компаратор с выходом и двумя входами и задатчик подачи со входом, причем вход детектора соединен с выходом датчика вибрации, один из входов компаратора соединен с выходом детектора, а другой - с выходом управляемого элемента памяти, выход компаратора соединен со вторым входом арифметического устройства, а вход задатчика подачи соединен с третьим выходом арифметического устройства.
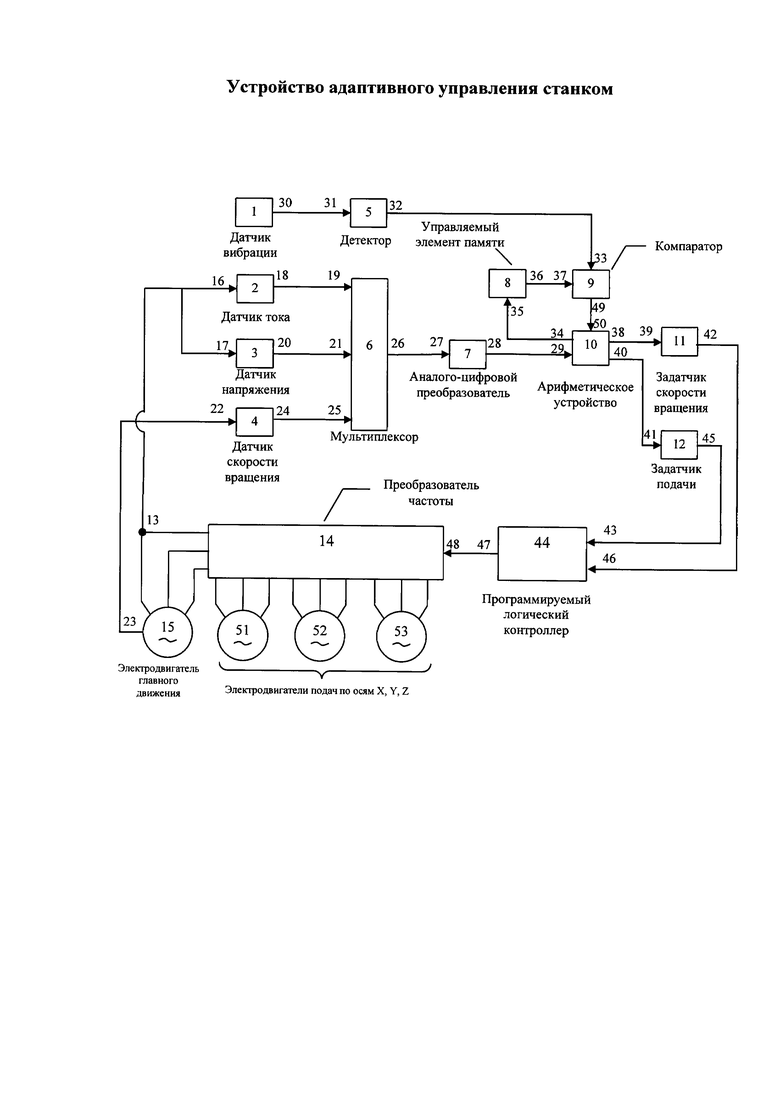
Устройство адаптивного управления станком поясняется графическим материалом, где на чертеже изображена блок-схема устройства адаптивного управления станком по сигналам активной мощности электропривода главного движения и вибрации станка.
Устройство адаптивного управления станком (по сигналам активной мощности электропривода главного движения и вибрации станка) содержит датчик 1 вибрации, коммутационно связанные датчик 2 тока, датчик 3 напряжения, датчик 4 скорости вращения, детектор 5, мультиплексор 6, аналого-цифровой преобразователь 7, управляемый элемент памяти 8, компаратор 9, арифметическое устройство 10, задатчик 11 частоты вращения электродвигателя, задатчик 12 подачи инструмента.
Выход 13 преобразователя частоты 14, подключенного к фазе статора электродвигателя 15 главного движения, соединен с входом 16 датчика 2 тока и параллельно с входом 17 датчика 3 напряжения, выход 18 датчика 2 тока соединен с входом 19 мультиплексора 6, выход 20 датчика 3 напряжения со входом 21 мультиплексора 6, вход 22 датчика 4 скорости вращения с валом 23 электродвигателя 15, выход 24 датчика 4 скорости вращения с входом 25 мультиплексора 6, выход 26 мультиплексора 6 со входом 27 аналого-цифрового преобразователя 7, выход 28 аналого-цифрового преобразователя 7 с входом 29 арифметического устройства 10, выход 30 датчика 1 вибрации с входом 31 детектора 5, выход 32 детектора 5 с входом 33 компаратора 9, выход 34 арифметического устройства 10 соединен с входом 35 управляемого элемента памяти 8, выход 36 управляемого элемента памяти 8 соединен с входом 37 компаратора 9, выход 38 арифметического устройства 10 с входом 39 задатчика 11, выход 40 арифметического устройства 10 с входом 41 задатчика 12, выход 42 задатчика 11 соединен с входом 43 программируемого логического контроллера 44, выход 45 задатчика 12 с входом 46 программируемого логического контроллера 44, выход 47 программируемого логического контроллера 44 соединен с входом 48 преобразователя частоты 14.
Устройство адаптивного управления станком по сигналам активной мощности электропривода главного движения и вибрации станка работает следующим образом.
В процессе работы электродвигателя 15 выходные сигналы датчика 2 тока и датчика 3 напряжения, подключенных к одной фазе статора электродвигателя, поступают, соответственно на входы 19 и 21 мультиплексора 6, выходной сигнал датчика 4 скорости вращения поступает на вход 25 мультиплексора 6. Выходной сигнал мультиплексора 6 передается на вход аналого-цифрового преобразователя 7, в котором происходит преобразование сигнала из аналогового вида в цифровой код. Выходной сигнал с выхода аналого-цифрового преобразователя 7 поступает на вход арифметического устройства 10, осуществляющего выборку, нормализацию, градуировку измерительного сигнала и вычисление активной мощности:

где Р - активная мощность [Вт] в i-й момент времени, UД - действующее значение напряжения [В], IД - действующее значение тока [А], Δφ - разность начальных фаз первых гармоник тока и напряжения.
Сигнал с датчика 1 вибрации поступает на детектор 5, на выходе 32 которого формируется среднеквадратическое значение (огибающая) сигнала вибрации, выходной сигнал с детектора 5 поступает на вход 33 компаратора 9, на выходе 49 которого формируется результат сравнения с установленным значением огибающей сигнала вибрации при холостом ходе и хранимой в управляемом элементе памяти 8, при этом результат сравнения подается на вход 50 арифметического устройства 10. Значение огибающей сигнала вибрации при холостом ходе записывается в управляемый элемент памяти 8 по команде от арифметического устройства 10, когда происходит подналадка станка на холостом ходу.
Превышение значение сигнала огибающей на входе 33 компаратора 9 значения сигнала огибающей на входе 37 компаратора 9, хранимой в управляемом элементе памяти, а также превышение вычисленным значением активной мощности установленного значения (уставки), Руст, [Вт], хранимой в самом арифметическом устройстве 10, приводит к установлению на выходах 38 и 40 арифметического устройства 10 сигналов, пропорциональных разностей:

Сигналы с выходов 38 и 40 арифметического устройства 10 подаются на входы задатчиков 11 скорости вращения электродвигателя и 12 подачи, соответственно, которые формируют сигналы, пропорциональные скорости вращения вала электродвигателя 15 и величине подачи электродвигателей 51, 52, 53 таким образом, чтобы ΔР→0. Коэффициенты пропорциональности сигнала, формируемых задатчиками 11 частоты вращения электродвигателя и 12 подачи подбираются непосредственно при установке и наладке устройства на станке.
Управление подачей осуществляется по скорости перемещения инструмента по трем координатам (для двигателей 51, 52, 53) с помощью интерполяции средствами системы управления станка (программируемым логическим контроллером 44). Сформированные сигналы с задатчиков скорости вращения 11 электродвигателя главного движения 15 и величины подачи 12 для электродвигателей 51, 52, 53 в программируемом логическом контроллере 44 преобразуются в цифровой код и в виде команд подаются на преобразователь частоты 14, который изменяет скорость вращения электродвигателей 15, 51, 52 и 53. Процесс регулирования скорости вращения и величины подачи осуществляется до тех пор, пока ΔР не будет равна нулю и на выходах задатчиков 11 и 12 не установятся нулевые значения сигналов подналадки. Таким образом, происходит оптимизация работы электродвигателя главного движения металлорежущего станка и системы адаптивного управления этим двигателем посредством регистрации и контроля активной мощности, пропорциональной нагрузке на валу электродвигателя, совместно с регистрацией вибрации станка и автоматического управления скоростью вращения электродвигателя, что за счет стабилизации активной мощности в широких пределах в конечном итоге повышает эффективность всего электропривода и процесса резания в целом.
В предлагаемом устройстве адаптивного управления станком по сигналам активной мощности электропривода главного движения и вибрации станка используются дополнительно датчик вибрации, что наряду с детектором и компаратором, повышает надежность и актуальность измерительной информации, а также качество адаптивного управления параметрами процесса резания (подачей и скоростью) по сигналу активной мощности. Использование в качестве управляющих сигналов скорости вращения вала электродвигателя главного движения и подачи режущего инструмента позволяет осуществить автоматизированную адаптацию режимов резания в зависимости от состояния режущего инструмента и качеств (жесткости) заготовки.
Анализ заявленного технического решения на соответствие условиям патентоспособности показал, что указанные в независимом пункте формулы признаки являются существенными и взаимосвязаны между собой с образованием устойчивой совокупности необходимых признаков, достаточной для получения требуемого синергетического (сверхсуммарного) технического результата.
Таким образом, вышеизложенные сведения свидетельствуют о выполнении при использовании заявленного технического решения следующей совокупности условий:
- объект, воплощающий заявленное техническое решение, при его осуществлении относится к автоматическому управлению и регулированию на металлорежущих станках и может быть использован для построения системы управления станком с применением данных о величине активной мощности электродвигателя главного движения, потребляемой в процессе резания, временные рамки которого определяются с помощью сигнала вибрации;
- для заявленного объекта в том виде, как он охарактеризован в независимом пункте формулы полезной модели, подтверждена возможность его осуществления с помощью вышеописанных в материалах заявки и известных из уровня техники на дату приоритета средств и методов;
- объект, воплощающий заявленное техническое решение, при его осуществлении способен обеспечить достижение усматриваемого заявителем технического результата.
Следовательно, заявленный объект соответствует требованиям условий патентоспособности «новизна», «изобретательский уровень» и «промышленная применимость» по действующему законодательству.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ НАГРУЗКИ НА ВАЛУ ЭЛЕКТРОДВИГАТЕЛЯ МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 2011 |
|
RU2481183C2 |
| Система экстремального регулирования амплитуды вибраций на металлорежущем станке с выдвижным шпинделем | 1985 |
|
SU1352453A1 |
| Система адаптивного управления шлифовальным станком | 1983 |
|
SU1156000A1 |
| Система адаптивного управления металлорежущим станком | 1981 |
|
SU996997A1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ СОСТОЯНИЯ РЕЖУЩЕГО ИНСТРУМЕНТА НА СТАНКЕ С ЧПУ | 1991 |
|
RU2030981C1 |
| Устройство для управления станком с выдвижным шпинделем | 1982 |
|
SU1108393A1 |
| Устройство ограничения вибраций на шлифовальном станке | 1981 |
|
SU952553A1 |
| АДАПТИВНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ПРОЦЕССА КОНТРОЛЯ НА МЕТАЛЛОРЕЖУЩЕМ СТАНКЕ | 1990 |
|
RU2042168C1 |
| Способ управления рабочим циклом поперечной подачи при врезном шлифовании и устройство для его осуществления | 1985 |
|
SU1296385A1 |
| Устройство для программного управления станком | 1984 |
|
SU1213467A1 |
Изобретение относится к области адаптивного управления металлорежущими станками. Устройство содержит датчики тока, напряжения и скорости вращения, установленные на электродвигателе главного движения станка, управляемый элемент памяти, последовательно соединенные мультиплексор, входы которого соединены с упомянутыми датчиками, аналого-цифровой преобразователь, арифметическое устройство и задатчик частоты вращения вала электродвигателя главного движения станка. Устройство также снабжено задатчиком подач рабочего стола станка, программируемым логическим контроллером, выполненным с возможностью подключения к преобразователям частоты электродвигателей главного движения станка и подач рабочего стола, и последовательно соединенными датчиком вибрации, предназначенным для установки на рабочем столе станка, детектором и компаратором. Использование изобретения позволяет повысить эффективность управления станком и оптимизировать его работу. 1 ил.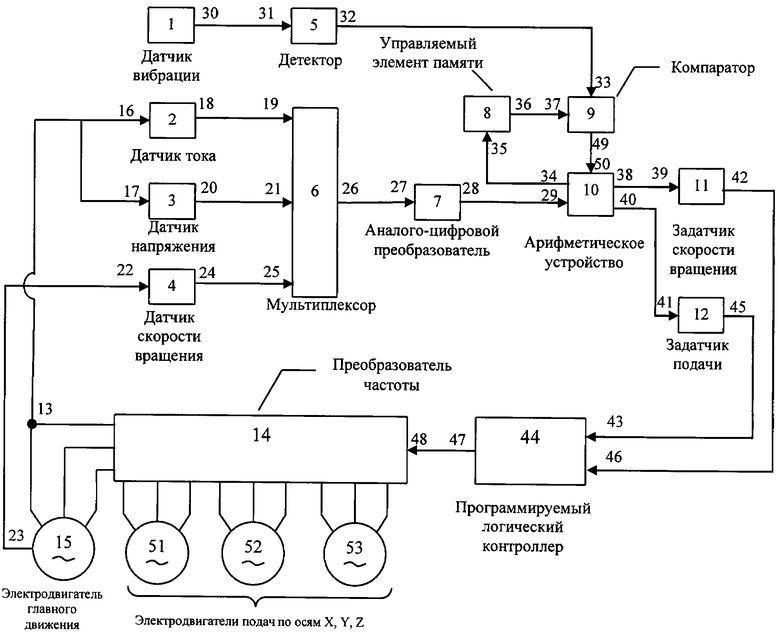
Устройство для адаптивного управления станком, оснащенным электродвигателем главного движения и рабочим столом с электродвигателями подач по осям X, Y, Z, содержащее датчики тока, напряжения и скорости вращения, предназначенные для установки на электродвигателе главного движения, управляемый элемент памяти, последовательно соединенные мультиплексор, аналого-цифровой преобразователь, арифметическое устройство, выполненное в виде микроконтроллера, и задатчик частоты вращения вала электродвигателя главного движения, при этом входы мультиплексора подключены к упомянутым датчикам тока, напряжения и скорости вращения, а второй выход арифметического устройства соединен со входом управляемого элемента памяти, отличающееся тем, что оно снабжено задатчиком подач рабочего стола, программируемым логическим контроллером, выполненным с возможностью подключения к преобразователям частоты упомянутых электродвигателей главного движения и подач, и последовательно соединенными датчиком вибрации, предназначенным для установки на рабочем столе станка, детектором и компаратором, при этом второй вход компаратора соединен с выходом управляемого элемента памяти, выход компаратора соединен со вторым входом арифметического устройства, третий выход которого подключен ко входу задатчика подач рабочего стола, а выходы упомянутых задатчиков частоты вращения и подач соединены со входами программируемого логического контроллера.

