(54) ЭЛЕКТРОПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1986 |
|
SU1394385A1 |
| Электропривод постоянного тока | 1987 |
|
SU1458960A2 |
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092964C1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2016 |
|
RU2621288C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2007 |
|
RU2366069C1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2017 |
|
RU2658678C1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| Способ защиты обмотки якоря электродвигателя от перегрева и устройство для его осуществления | 1984 |
|
SU1279010A1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2003 |
|
RU2265950C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНОЙ МАШИНОЙ | 2003 |
|
RU2242837C1 |
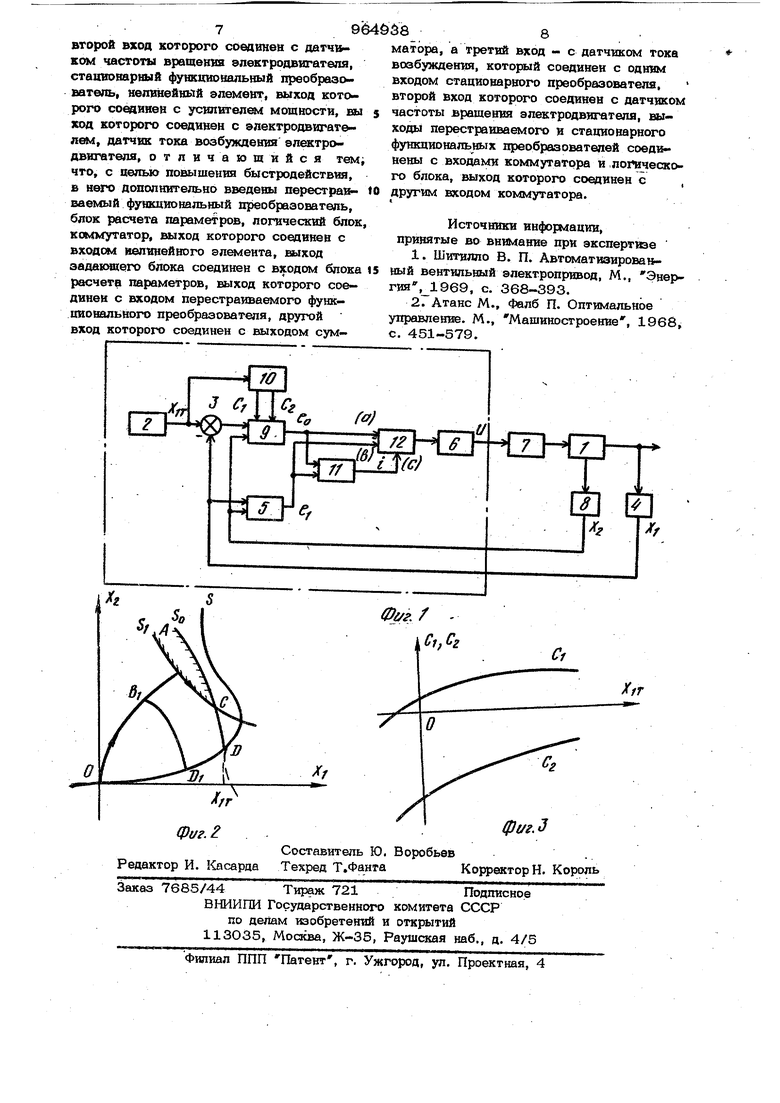
Изобретение относится к электротехнике, а именно к устройствам автоматвческого управления электродвигателями, обеспечивающими оптимальное по быстро действию регулирование частоты врашения электродвигателей, управляемых по цепи обмотки возбуждения. Известен электропривод постоянного тока, подчиненного регулирования, содержащий электродвигатель, послеаова тельно соединенные задающее устройство, первый сумматор, регулятор скорости, второй сумматор и регулятор тока обмотки возбуждения электродвщ теля |:i. Недостатком этого устройства-являет .ся низкое быстродействие при ступенча том изменении задающего воздействия. Наиболее-близким по технической сущ ности к предлагаемому является устройство, содержащее электродвигатель, за дающий блок, выход которого соединен с первым входом сумматора, второй вход которого соединен с датчиком частоты вращения электродвигателя, стационарный .функциональный преобразователь, нелинейный элемент, шлход которого соединен с усилителем мощности, выход которого соединен с двигателем, датчик тока возбуждения длектродвигаталя 2J. Однако использование этого устройства не позволяет обеспечить высокое бы(:яродействие при управлении электроприводом по цепи возбуждеИия. Цель изобретения - повыщение crpoiдействия устройства. Поставленная цепь достигается тем, :что в устройство дополнительно введены перестраиваемый функциональный прео&разователь блок расчета параметров, ло гический блок, коммутатор, выход котоiporo соединен с входом нелинейного але мента, выход задающего блока соединен с входом блока расчета параметров, выход которохю соединен с вкодом пересграиваемого функционального преобразователя, другой вход которого соединен с выходом сумматора, а .третий вход - с датчиком тока возбуждения, который ср&3964 (динен с одним входом стационарного преобразователя, второй вход которого соединен с датчиком частоты вращения электродвигателя, выход14 перестраиваемого и стационарного функциональных преобраэрвателей соединены с входами коммутатора и логического блока, выход которого соединен с другим входсж коммутатора, выход которого соединен с нелинейным элементом. На фиг. 1 представлена структурная схема устройства; на фиг. 2 и 3 - графт ки поясняющие его работу. Устройство содержит электродвигатель 1, задающий блок 2, выход которого соединен с первым входом сумматора 3, второй вход которого соединен с датчиком 4 тока возбуждения электродвигателя 1, стационарный функциональный преобразова тель 5, нелинейный элемент 6, выход которого соединен с усилителем 7 мощности, выход которого соединен с обмот. кой возбуждения электродвигателя 1, датчик 8 частоты вращения электродвигателя 1, перестраиваемый функциональный преобразователь 9j блок 10 расчета пара метров, логический блок 11, коммутатор 12, выход которого соединен с входом нелинейного. элемента 6. Выход задающего блока 2 соединен с входом блока 1О, выход которого соединен с входом перест раиваемого функционального преобразователя 9, другой вход которого соединен с выходом сумматора 3, а третий вход - с датчиком 8, который соединен также с одним входом стационарного функционального преобразователя 5, второй вход которого соединен с датчиком 4. Выходы перестраиваемого и стационарного функциональных преобразователей 9 и 5 соединены с входами коммутатора 12 и логического блока 11, выход которого соединен с другим входом км 1мутатора 12, выход которого соединен с нелинейным элементом 6. Устройство работает следующим образом. Электродвигатель 1, управляемый по цепи возбуждения, с учетом коэффициента усилителя 7 описывается системой дифференциальных уравнений: (j х ,, -| Кг-аагХа.«-1эи, где X , У1 угловая скорость электродвигателя, ток обмотки возбуждения; (J - напряжение на выходе управляющего устройства; /U(Xyt)- приведенный момент динамического сопротивления; - постоянные коэффициенты. В соответствии с ограничением на напряжение обмотки возбуждения на величину О накладывается ограничение lUUUo. Линия 5 установивишхся значений скорости электродвигателя 1 в координатах Xl, а описывается уравнением: /(,,, 0 а) и для случая fy/,) Xi меет вид, представленный на фиг. 2, десь же приведены типовые траектории оптимального по быстродействию разгона лектродвигателя 1 до заданного значения установившейся скорости Х , вклю. чающие три участка: ОВ-участок движения при и (Jo ; ВС-участок движения при и/ IUolH СР -участок движения при U -UoУчасток ВС лежит на линии оптимального движения 5 : о 1х л участок СХ - по линии переключения 5© . описываемой приближенным уравнением: где С., С j - коэффициенты аппроксимации фазовой траектории, проходящей через точку 1 при . и С зависят Значения С от величины заданной скорости т.е. (Х), , Отклонение движения сиотемы от рассматриваемых участков опт мальной траектории оценивается функциями:. , . е,--)о CoK i-1-Х 1-г (5) В предлагаемом устройстве сигналы 8 о и В получаются с помощью перестраизаа ого и стационарного функцио нальных преобразователей 9 и 5, как результат обработки выходных сигналов датчиков 4 и 8 и сумматора 3. Причем, перестраиваемый функциональный преобразователь 9-. настраивается автоматически в соответствии с текущими значениями параметров-С и С, вырабатываемыми блоком 10 расчета параметров. Блок 10 также является функциональным преобразователем, который производит расчет параметров по величине сигнала 59 Xfj-, поступающего с задающего устройства 2. Характер зависимостей С(У и Са.: Са(Х -,т) для случая (Х)яЗоЧ 51вНУ. иллюстрируется фиг. 3. Для обеспечения попадания изображающей точки ( X, ,) на литпо SQ или 5 и йрследуюшего движения вдоль оптимальной траектории, составленной из отрезков этих линий, формируется релейный с переменной структурой закон управ лений по отклонению: (-Jo igMBo при -(«О, . lJ-|.U6iq-Mer Р« где-иф д у, g - релейная функциональная зависимость, реализуемая нелинейным элементом 6, : . - управляющий сигнал,формируемый логическим блоком 11 и поступающий на вход С коммутатора 12. Значение сигнала и, следовательно, структура закона управления (б) определя ются текущим состоянием электродвигателя 1: .1 1, если изображающая точка находится внутри области А (фиг. 2), ;-1 0 - в остальных случаях. В режиме разгона электродвигателя 1 логический блок 11 реализует следующий алгч ритм:g Q (1 1 при)°;,, )l - о в остальных случаях. Коммутатор 12 представляет собой управляемый контакт, осуществляющий переключение структуры закона управления (6), т.е. подключение к нелинейному элементу 6 сигналов PQ или C-j в зависимости от значения и . Рассмотрим работу устройства в режиме разгона электродвигателя 1 от нулевой скорости. При поступлении на вход блока 10 задающего воздействия ,блок 10 вырабатывает значения параметров С и С и производит настройку перестраиваемого, функционального преобразователя 9. Сигналы с датчиков 4 и 8 и сумматора 3 поступают на входы перестраиваемого и стационарного функциона- льных преобразователей 9 и 5« Последние производят расчет текущих значений сиг« налов ЕО и , подающихся на входы KCfM мутатора 12 и логического блока 11. На выходе логического блока. 11 формируются управляющий сигнал , При этом сигнал Со 0 со вход коммутатора 12 поступает на его выход и, следовательно, вход нелинейного элемента 6. Формируется сигнал и -4J о подается на вход усилителя 7 и электродвигателя 1 прюсодит в движение, соответствующее перемещению изображающей точки (., 366 Хг ) по отрезку ОБ (фиг. 2). По мере воэрастания скорости и тока точка попадает в область А, выполняются условия, при которых на выходе логического блока 11 4 , и происходит переключение комму татора 12. Сигнал с входа в подается на вход нелинейного элемента 5. Формируется управляющее воздействие Ц --UoSigfne,обеспечивающее скольжение изображающей точки вдоль отрезка ВС лиНИИ 5.J . После выхода системы из о&ласти А в точке С выполняется л 0 и 8(. Коммутатор 12 переключается. На выходе нелинейного элемента 5 формируется сигнал и -UoSighKo--Uo t изображающая точки движется вдоль линии 5 до попадания в точку ) , где Х- - . При разгоне до меньших значений угловой скорости, когда система на попадает в область А, всегда выполняется 0 и переключения коммутатора 12 не происходит (фиг.2, ломаная). В торможения работа устройства протекает аналогично. Для исключения вибраций управляющего сигнала и выходных координат при движении системы вдоль оптимальной траектории, нежелательных в системах больщой мощности, релейная зависимость, реализуемая нелинейным элементом 6, может быть заменена на нелинейность типа насыщение, коэффициент линейного участка которой определяется в зависимости от условий работы электродвигателя 1 и желаемой степени приближения к оцтимальному режиму. Применение предлагаемого устройства позволяет уменьшить длительность переходных процессов разгона и реверса элек- тродвигатёля, так как при любых значен&ях задающего воздействия переходные процессы протекают оптимальным образом. Наибольший технико-экономический эффект может быть достигнут при использовании устройства управления в системах работающих в режиме частых ступенчатых регулировок угловой скорости. Так, например, применение устройства для управ- ления электродвигателем электрической установки транспортных средств позволяет значительно увеличить их 1 аневренность. Формула изобретения Электропривод, содержащий электродвигатель, задающий блок, выход которого соединен с первым входом румматора.
