Область техники
Настоящее изобретение относится к устройству и способу позиционирования для определения местоположения с использованием системы абсолютного позиционирования и системы относительного позиционирования, к компьютерной программе и носителю информации.
Предшествующий уровень техники
Глобальные навигационные спутниковые системы (GNSS), такие как глобальная система позиционирования (GPS-система), используются в мировом масштабе пользователями для определения своего местоположения (долгота, широта, высота) на земле.
GPS-система включает в себя ряд спутников, вращающихся вокруг Земли, причем каждый спутник передает радиосигналы, содержащие точную временную информацию о времени, когда радиосигналы передаются спутником. Радиосигналы также содержат информацию местоположения (орбитальную информацию), включающую в себя информацию о местоположении соответствующего спутника, и спутниковую идентификацию, которая уникальна для конкретного спутника.
Устройства позиционирования, такие как GPS-приемники, выполнены с возможностью приема этих сигналов и вычисления своего местоположения на основе принятых сигналов. Такие устройства позиционирования предоставляют информацию абсолютного позиционирования относительно системы абсолютных координат и поэтому также могут упоминаться как системы абсолютного позиционирования.
Устройства позиционирования выполнены с возможностью приема этих передаваемых радиосигналов и вычисления времени прохождения такого радиосигнала на основе временной информации, содержащейся в радиосигнале, и измеренного времени прихода радиосигнала с использованием синхрогенератора (часов), содержащегося в устройстве позиционирования. Время прохождения обычно составляет 65-85 миллисекунд. На основе времени прохождения расстояние от устройства позиционирования до спутника может быть вычислено, просто путем умножения времени прохождения на скорость света (c=299,792,458 м/с).
На основе принятой орбитальной информации, содержащейся в радиосигнале, устройство позиционирования может вычислить местоположение спутника. Комбинируя информацию расстояния до спутника и местоположения спутника, устройство позиционирования помещается на воображаемую сферу, радиус которой равен расстоянию и в центре которой находится спутник.
Повторяя этот процесс вычисления, по меньшей мере, для четырех спутников, устройство позиционирования может вычислить четыре из таких воображаемых сфер, определяя одно пересечение, которое определяет местоположение устройства позиционирования.
Устройства позиционирования часто используются в навигационных устройствах, содержащих данные цифровой карты. Такие навигационные устройства могут быть выполнены с возможностью показа местоположения, как определено на цифровой карте, с использованием дисплея. Такое навигационное устройство может упоминаться как устройство отображения карты, где часть отображаемой карты определяется действительным местоположением, как определено устройством позиционирования.
Кроме того, такие навигационные устройства могут быть выполнены с возможностью вычисления навигационных инструкций от начального местоположения (например, текущего местоположения) к положению места назначения, чтобы направлять пользователя к адресу места назначения. Так как устройство позиционирования может помещать текущее местоположение на цифровую карту, навигационное устройство способно предоставлять детальные навигационные инструкции, например: "после 100 метров поверните налево". Должно быть понятно, что точная позиционная информация необходима для таких приложений, чтобы гарантировать оптимальную навигацию и оптимальный комфорт для пользователя.
Чтобы увеличить точность местоположения, как определено устройством позиционирования, используя систему абсолютного позиционирования, устройство позиционирования может использовать более четырех спутников. В общем случае, устройство позиционирования использует информацию от всех спутников, от которых оно принимает радиосигналы. Вообще, чем больше спутников используется, тем более точным является определенное местоположение.
Точность местоположения, как определено устройством позиционирования, находится под влиянием ряда факторов, таких как вычисленное местоположение спутника, вычисленное время прохождения радиосигнала, текущее время, как определено часами устройства позиционирования. Известен ряд методов, которые позволяют уменьшить влияния этих системных ошибок, таких как WAAS (Усовершенствованная система расширенной области) и DGPS (дифференциальная GPS), как известно специалисту в данной области техники.
Точность определенного местоположения может быть дополнительно увеличена при использовании метода, называемого согласованием карты. Этот метод обеспечивал дальнейшее увеличение точности определенного местоположения путем отображения местоположения, как определено, на улицу или тому подобное, как сохранено в базе данных карты.
Однако также может быть идентифицирован ряд дополнительных ошибок, уменьшающих точность определенного местоположения, таких как ионосферные эффекты, ошибки спутниковых часов и т.д. Одним специальным типом ошибки является так называемое искажение многолучевого распространения.
Многолучевость возникает в ситуациях, в которых радиосигнал, переданный спутником, отражается объектом, таким как здание, и устройство позиционирования принимает радиосигнал после отражения, возможно, вместе с неотраженным радиосигналом. В результате вычисленное расстояние между спутником и устройством позиционирования вводит ошибку в вычисленное местоположение устройства позиционирования.
Устройства позиционирования могут также содержать или взаимодействовать с системой относительного позиционирования, чтобы в принципе улучшить точность позиционирования системы абсолютного позиционирования или определять местоположение в ситуациях, в которых радиосигналы не могут приниматься, или принимается недостаточно радиосигналов. Системы относительного позиционирования предоставляют информацию локального и относительного позиционирования.
Эти системы относительного позиционирования могут, например, быть, по меньшей мере, одним из гироскопа, акселерометра, компаса, измерителя расстояния (такого как одометр), инклинометра. В случае, если устройство позиционирования используется в транспортном средстве, таком как автомобиль или мотоцикл, устройство относительного позиционирования может также быть модулем измерения расстояния/скорости, который обычно присутствует в таком транспортном средстве, и/или модулем, обнаруживающим управляющие действия рулевого колеса, и/или другими датчиками, которые могут присутствовать в транспортном средстве.
Ситуациями, в которых больший акцент может быть сделан на системах относительного позиционирования (т.е. информация от системы относительного позиционирования взвешивается с большим весом), являются ситуации, когда, например, устройство позиционирования входит в туннель или на подземную стоянку. Устройство позиционирования больше не будет иметь возможности определить свое местоположение, используя систему абсолютного позиционирования, поскольку принимается недостаточно радиосигналов. В туннеле или на подземной стоянке устройство позиционирования использует информацию, принимаемую или получаемую от системы относительного позиционирования.
Например, гироскоп предоставляет информацию об относительном вращательном движении. В комбинации с последним полученным местоположением, основанным на системе абсолютного позиционирования, и измерителем расстояния это может использоваться, чтобы вычислить текущее положение внутри туннеля или на подземной стоянке.
Патент США 5311195 описывает навигационную систему, использующую комбинацию системы абсолютного позиционирования, такой как GPS-приемник, и системы относительного позиционирования, такой как бортовой датчик колеса и/или магнитный компас. Согласно патенту США 5311195, местоположение, как определено системой относительного позиционирования, обновляется местоположением, как определено системой абсолютного позиционирования, в случае, если контур равной вероятности местоположения, определенного системой относительного позиционирования, перекрывается с контуром равной вероятности местоположения, определенного системой абсолютного позиционирования. Так, в случае, если точность системы относительного позиционирования низка, система абсолютного позиционирования может использоваться, чтобы обновить систему относительного позиционирования.
Согласно предшествующему уровню техники, устройства позиционирования выполнены с возможностью определения местоположения с использованием системы абсолютного позиционирования и системы относительного позиционирования и дополнительно выполнены с возможностью работы
- в первом режиме, в котором местоположение определяется с использованием системы абсолютного позиционирования и, возможно, системы относительного позиционирования, и
- во втором режиме, в котором местоположение определяется с использованием системы относительного позиционирования и, возможно, системы абсолютного позиционирования,
при этом в первом режиме система абсолютного позиционирования взвешивается с большим весом для определения местоположения, чем во втором режиме. Устройства позиционирования выполнены с возможностью переключения из первого режима во второй режим и наоборот, основываясь на определенных точностях систем абсолютного и/или относительного позиционирования.
На основе изложенного выше, целью является обеспечить устройство и способ позиционирования, которые обеспечивают более точную информацию о местоположении.
Сущность изобретения
Согласно одному аспекту, обеспечено устройство позиционирования, выполненное с возможностью определения местоположения с использованием системы абсолютного позиционирования и системы относительного позиционирования и дополнительно выполненное с возможностью работы
- в первом режиме, в котором местоположение определяется с использованием системы абсолютного позиционирования и, возможно, системы относительного позиционирования, и
- во втором режиме, в котором местоположение определяется с использованием системы относительного позиционирования и, возможно, системы абсолютного позиционирования,
в первом режиме система абсолютного позиционирования взвешивается с большим весом, чем во втором режиме, для определения местоположения, и устройство позиционирования выполнено с возможностью переключения из первого режима во второй режим, отличающееся тем, что устройство позиционирования включает в себя или имеет доступ к базе данных цифровой карты, и решение о переключении из первого во второй режим принимается на основе, по меньшей мере, определенного местоположения в комбинации с информацией, хранящейся в базе данных цифровой карты. Такое устройство позиционирования обеспечивает более точное определение местоположения, поскольку переключение из одного режима в другой режим может быть выполнено, прежде чем качество одного режима ухудшится в слишком большой степени.
Согласно варианту осуществления, система абсолютного позиционирования является одной из спутниковой системы позиционирования и наземной системы позиционирования.
Согласно варианту осуществления, система относительного позиционирования является, по меньшей мере, одним из гироскопа, акселерометра, компаса, модуля измерения скорости, измерителя расстояния, инклинометра и модуля, обнаруживающего управляющие действия рулевого колеса.
Согласно варианту осуществления, информация, сохраненная в базе данных цифровой карты, содержит множество географических объектов, имеющих пороговые расстояния, ассоциированные с ними.
Согласно варианту осуществления, устройство позиционирования выполнено с возможностью вычисления, по меньшей мере, одного расстояния от определенного местоположения до варианта выбора из множества географических объектов, имеющих пороговые расстояния, ассоциированные с ними, и переключение из первого режима во второй режим осуществляется, если, по меньшей мере, одно из вычисленных расстояний ниже соответствующего ассоциированного порога.
Согласно варианту осуществления, система абсолютного позиционирования выполнена с возможностью определения местоположения на основе сигналов, принятых от множества передатчиков, являющихся частью спутниковой системы позиционирования или наземной системы позиционирования.
Согласно варианту осуществления, база данных цифровой карты представляет собой базу данных трехмерной цифровой карты, и информация включает в себя трехмерную информацию о географических объектах, причем устройство позиционирования выполнено с возможностью вычисления качества местоположения, как определено системой абсолютного позиционирования, основываясь на, по меньшей мере, одном из определенного местоположения, местоположения передатчиков и базы данных трехмерной цифровой карты.
Согласно варианту осуществления, устройство позиционирования выполнено с возможностью определения соответствующих местоположений передатчиков на основе информации местоположения, содержащейся в соответствующих сигналах.
Согласно варианту осуществления, решение о дополнительном переключении из второго в первый режим способа принимается на основе определенного местоположения в комбинации с информацией, сохраненной в базе данных цифровой карты.
Согласно варианту осуществления, устройство позиционирования выполнено с возможностью поддержания файла истории, включающего в себя ранее определенные местоположения и ассоциированные точности, как определено согласно системе абсолютного позиционирования, и если выполнено переключение из первого режима во второй режим, устройство позиционирования выполнено с возможностью выбора начального местоположения для системы относительного позиционирования из файла истории.
Согласно варианту осуществления устройство позиционирования выполнено с возможностью определения точности определенных местоположений в одном режиме, сравнения определенной точности местоположений с пороговым значением и в случае, если точность ниже порогового значения, сохранения этих местоположений как географический объект с рекомендованным режимом, ассоциированным с ним, причем рекомендованный режим отличается от упомянутого одного режима.
Согласно одному аспекту, обеспечен способ, причем способ содержит определение местоположения с использованием системы абсолютного позиционирования и системы относительного позиционирования, причем местоположение может быть определено
- в первом режиме, в котором местоположение определяется с использованием системы абсолютного позиционирования и, возможно, системы относительного позиционирования, и
- во втором режиме, в котором местоположение определяется с использованием системы относительного позиционирования и, возможно, системы абсолютного позиционирования,
в первом режиме система абсолютного позиционирования взвешивается с большим весом, чем во втором режиме, причем способ дополнительно содержит переключение из первого режима во второй режим,
отличающийся тем, что способ содержит действие для принятия решения, следует ли переключиться из первого режима во второй режим, на основе определенного местоположения в комбинации с информацией, сохраненной в базе данных цифровой карты.
Согласно одному аспекту, обеспечена компьютерная программа, которая при загрузке в компьютерное устройство действует для выполнения любого одного из способов согласно упомянутому выше.
Согласно одному аспекту, обеспечен носитель информации, содержащий компьютерную программу согласно упомянутому выше.
Краткое описание чертежей
Настоящее изобретение описано ниже более детально с использованием ряда примерных вариантов осуществления со ссылками на чертежи, которые предназначены для иллюстрации настоящего изобретения, а не ограничения его объема, который ограничен только приложенной формулой изобретения:
фиг.1 схематично изображает устройство позиционирования согласно предшествующему уровню техники,
фиг.2 схематично изображает устройство позиционирования, взаимодействующее со спутниками, и
фиг.3, 4 и 5 схематично изображают блок-схемы согласно вариантам осуществления.
Детальное описание
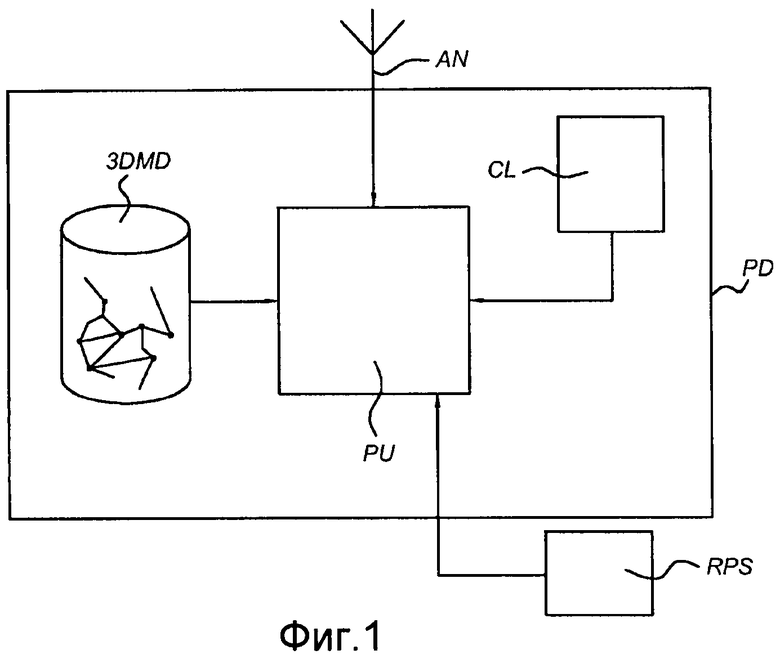
Как уже кратко описано выше, устройство позиционирования может быть выполнено с возможностью работы в первом режиме, в котором местоположения определяются с использованием системы абсолютного позиционирования, и во втором режиме, в котором местоположения определяются с использованием системы относительного позиционирования. Такое устройство позиционирования может содержать блок обработки PU, включающий в себя или взаимодействующий с такой системой абсолютного и относительного позиционирования. Блок обработки PU может также быть выполнен с возможностью переключения из первого во второй режим и наоборот. Сначала блок обработки PU такого устройства позиционирования описывается ниже более подробно.
Блок обработки
Блок обработки PU показан схематично на фиг.1, но должно быть понятно, что блок обработки PU может быть сформирован как компьютерный блок, например, содержащий процессор для выполнения арифметических операций и память, причем память содержит программные строки, считываемые и исполняемые процессором, чтобы обеспечить устройству позиционирования PD функциональные возможности, описанные здесь.
Память может быть блоком с магнитной лентой, жестким диском, памятью только для считывания (ROM), электрически стираемой программируемой памятью только для считывания (EEPROM) и памятью произвольного доступа (RAM).
Блок обработки PU может дополнительно содержать или быть конфигурированным для осуществления связи с
- устройствами ввода, такими как клавиатура, мышь, сенсорный экран, громкоговоритель,
- устройствами вывода, такими как дисплей, принтер,
- считывающими устройствами для считывания носителей данных, таких как гибкие диски, CD ROM, DVD, флэш-карты, USB-sticks и т.п., и
- устройствами связи, выполненными с возможностью связи с другими компьютерными системами через сеть связи, такую как сеть мобильной телефонной связи, GSM-сеть, UMTS-сеть, RF-сеть, (беспроводный) Интернет и т.д.
Блок обработки PU может быть выполнен с возможностью приема информации от системы относительного позиционирования (также называемой автономной системой позиционирования), как объяснено более подробно ниже, с использованием подходящих устройств ввода или считывающих устройств.
Однако должно быть понятно, что может быть обеспечено больше таких устройств, и/или могут быть предусмотрены другие блоки памяти, устройства ввода, устройства вывода и считывающие устройства, известные специалистам в данной области техники. Кроме того, одно или более из них может быть физически расположено удаленно от блока обработки PU, если требуется. Блок обработки PU показан как один блок, однако он может включать в себя несколько блоков обработки, функционирующих параллельно или управляемых одним главным блоком обработки, которые могут быть расположены удаленно один от другого, как известно специалистам в данной области техники.
Блок обработки PU может дополнительно включать в себя или быть выполнен с возможностью связи с часами CL и антенной AN. Часы CL могут использоваться в комбинации с системой абсолютного позиционирования. Антенна AN может использоваться для приема сигналов, например, от спутников системы абсолютного позиционирования.
Заметим, что соединения между различными элементами аппаратных средств могут быть физическими соединениями, но одно или более этих соединений могут быть выполнены беспроводными.
Блок обработки PU может быть компьютерной системой, но может быть любой системой обработки сигнала аналоговой и/или цифровой технологии и/или технологии программного обеспечения, выполненной с возможностью выполнения функций, описанных в настоящем документе.
Система абсолютного позиционирования
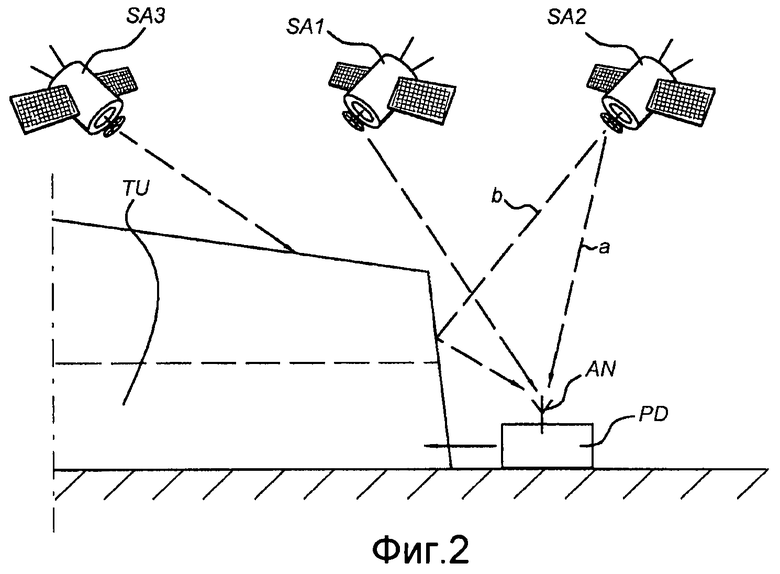
Фиг.2 показывает устройство позиционирования PD, как уже описано выше, использующее систему абсолютного позиционирования, чтобы определить свое местоположение. Устройство позиционирования PD включает в себя блок обработки PU, антенну AN и часы CL. Антенна AN предназначена для приема радиосигналов, переданных спутниками SA1, SA2, и передачи этих принятых радиосигналов в блок обработки PU. Хотя антенна AN изображена как элемент, продолжающийся от устройства позиционирования PD, понятно, что антенна AN также может быть сформирована внутри устройства позиционирования PD. Часы CL предназначены для предоставления точной информации времени в блок обработки PU.
Как уже описано выше, блок обработки PU может быть выполнен с возможностью приема радиосигналов от спутников SA1, SA2 через антенну AN. Из этих радиосигналов блок обработки PU получает информацию, такую как временная информация о времени, когда радиосигналы были переданы спутником, орбитальная информация, включающая в себя информацию о местоположении соответствующего спутника и спутниковой идентификации для спутников SA1, SA2.
Блок обработки PU может быть выполнен с возможностью определения времени прихода радиосигналов с использованием временной информации, полученной от часов CL. На основе временной информации о времени, когда радиосигналы были переданы спутником, и временной информации от часов CL блок обработки PU может вычислить время прохождения радиосигнала (вычитанием одного из другого) и расстояние между устройством позиционирования PD и соответствующим спутником (умножением времени прохождения на скорость света).
Путем объединения информации от множества спутников (по меньшей мере, четырех) может быть вычислено местоположение устройства позиционирования PD.
Фиг.2 далее показывает, что устройство позиционирования PD размещено около входа туннеля или подземной стоянки. Фактически, устройство позиционирования PD может находиться около объекта любого вида, который может блокировать радиосигналы, передаваемые спутником, такого как здание, дерево, холм, гора, виадуки и т.д. Фиг.2 далее схематично показывает первый спутник SA1, второй спутник SA2 и третий спутник SA3, вращающиеся вокруг Земли. Понятно, что хотя только три спутника SA1, SA2, SA3 показаны на фиг.2, фактически, обычно будет иметься более трех спутников SA1, SA2, SA3.
Первый спутник SA1 передает радиосигналы, обозначенные пунктиром. Можно видеть, что радиосигналы могут быть обнаружены устройством позиционирования PD. Блок обработки PU может теперь вычислить расстояние от устройства позиционирования PD до первого спутника SA1.
Второй спутник SA2 также передает радиосигналы, также обозначенные пунктиром. Однако эти радиосигналы испытывают искажение многолучевого распространения, поскольку радиосигнал от второго спутника SA2 поступает в антенну устройства позиционирования PD непосредственно (см. радиосигнал а на фиг.2), а также косвенным путем (см. радиосигнал b), то есть через отражение от входа туннеля TU.
Если блок обработки PU теперь вычисляет расстояние между устройством позиционирования PD и вторым спутником SA2, вычисляя время прохождения, понятно, что в результате будет получено ошибочное расстояние из-за искажения многолучевого распространения. Это ошибочное расстояние приведет к ошибочному определенному положению устройства позиционирования PD даже при использовании в комбинации с информацией, полученной от множества спутников SA1, SA2.
Радиосигналы от третьего спутника SA3 вообще не могут быть приняты устройством позиционирования, поскольку они полностью блокированы туннелем TU.
Понятно, что примеры системы абсолютного позиционирования, описанной здесь, не ограничены GPS-системами. Описанные варианты осуществления могут использоваться в комбинации с любым видом системы абсолютного позиционирования, используя сигналы, посылаемые беспроводным способом от множества передатчиков в приемник, такой как устройство позиционирования PD, позволяя приемнику вычислить свое местоположение на основе принятых сигналов.
Понятно, что такие сигналы обычно имеют низкий уровень мощности, что делает относительно трудным их обнаружение устройствами позиционирования.
Система абсолютного позиционирования может быть спутниковой системой позиционирования или глобальной навигационной спутниковой системой (GNSS), такой как GPS-система, GLONASS и Galileo.
Система абсолютного позиционирования может также быть наземной системой позиционирования, использующей маяки, размещенные на суше или на море, которые передают сигналы, содержащие информацию, которая может использоваться приемником для определения своего местоположения. Примером такой наземной системы является система навигации большой дальности LORAN. Другим примером такой системы может быть наземная система, использующая мачты мобильной телефонной связи (такие как мачты GSM) в качестве маяков.
Вообще система абсолютного позиционирования включает в себя множество передатчиков, таких как спутники или маяки, предназначенных для беспроводной передачи сигналов, таких как радиосигналы, которые могут приниматься приемником, таким как устройство позиционирования PD, которое выполнено с возможностью вычисления своего местоположения на основе принятых сигналов.
Система относительного позиционирования
Согласно вариантам осуществления, описанным в данном документе, устройство позиционирования PD может включать в себя или взаимодействовать с системой относительного позиционирования RPS, как схематично изображено на фиг.1. Как описано выше, такая система относительного позиционирования RPS может быть, например, по меньшей мере, одним из гироскопа, акселерометра, компаса, измерителя расстояния (такого как одометр), инклинометра. В случае, если устройство позиционирования PD используется в транспортном средстве, таком как автомобиль или мотоцикл, система относительного позиционирования RPS может также быть модулем измерения расстояния/скорости, который обычно присутствует в таком транспортном средстве, и/или модулем обнаружения управляющих действий рулевого колеса, и/или другими датчиками, которые могут присутствовать в транспортном средстве.
Понятно, что также могут использоваться другие системы относительного позиционирования RPS. Кроме того, может использоваться комбинация различных систем относительного позиционирования RPS.
Например, устройство позиционирования PD может быть выполнено с возможностью приема ввода от модуля измерения скорости и (электронного) компаса. На основе вводов, принятых от этих модулей, блок обработки PU устройства позиционирования PD может вычислить относительное положение, поскольку он может вычислить, какое расстояние прошло устройство позиционирования PD и в каком направлении.
Согласно предшествующему уровню техники, устройство позиционирования PD может быть выполнено с возможностью работы
- в первом режиме, в котором местоположение определяется с использованием системы абсолютного позиционирования и, возможно, системы относительного позиционирования, и
- во втором режиме, в котором местоположение определяется с использованием системы относительного позиционирования и, возможно, системы абсолютного позиционирования,
при этом в первом режиме система абсолютного позиционирования взвешивается с бóльшим весом для определения местоположения, чем во втором режиме. Переключение из первого режима во второй режим может запускаться путем сравнения оценок точностей местоположения, как определено обеими системами. Кроме того, когда никакое определение абсолютного местоположения невозможно, например, когда устройство позиционирования PD входит в туннель или на подземную стоянку, устройство позиционирования может перейти из первого режима во второй режим.
Из вышеизложенного должно быть ясно, что в первом режиме и втором режиме информация о местоположении, как получено из системы абсолютного и относительного позиционирования, может быть объединена путем взвешивания, фильтрации, смешивания и т.д., чтобы получить определенное местоположение устройства позиционирования.
Разумеется, могут быть применены дополнительные режимы, используя различное взвешивание системы абсолютного позиционирования и системы относительного позиционирования, иное, чем в первом и втором режимах. Кроме того, понятно, что согласно варианту осуществления система относительного позиционирования вообще не принимается во внимание в первом режиме, и/или система абсолютного позиционирования вообще не принимается во внимание во втором режиме.
Во втором режиме устройство позиционирования PD использует информацию относительного позиционирования, предоставленную системой относительного позиционирования RPS. Информация относительного позиционирования используется в комбинации с начальным местоположением (например, самым последним местоположением, как определено системой абсолютного позиционирования или предыдущим режимом), чтобы определить текущее местоположение.
Однако выявлено, что переключение из первого во второй режим и/или наоборот, согласно предшествующему уровню техники, может привести к неточной информации позиционирования, поскольку переключение обычно выполняется в момент времени, в котором местоположение, как определено согласно начальному режиму, уже относительно неточное.
Например, ошибка в начальном местоположении, используемом системой относительного позиционирования RPS, как определено первым режимом перед переключением из первого во второй режим, будет влиять на все последующие местоположения, определенные во втором режиме, поскольку начальное местоположение используется в качестве базы для них. Поэтому обеспечено усовершенствование, чтобы гарантировать вычисление более точной информации позиционирования.
База данных цифровой карты
Устройства позиционирования PD могут включать в себя или иметь доступ к базам данных цифровых карт DMD. Устройство позиционирования PD может быть выполнено с возможностью представления текущего местоположения на цифровой карте с использованием дисплея. Однако устройство позиционирования PD может также быть выполнено с возможностью обеспечения навигационных инструкций от начального местоположения (например, текущего местоположения) в положение места назначения, чтобы направлять пользователя к адресу места назначения.
Понятно, что термин "база данных цифровой карты", как используется здесь, не обязательно относится к структуре базы данных традиционным способом, то есть не подразумевает реляционную структуру между записями базы данных или администратором базы данных, координирующим базу данных. База данных цифровой карты, как используется здесь, относится к любому набору гео-пространственной информации, независимо от точного способа, которым структурирована информация.
Термин "географический объект", как используется здесь, может соответствовать реальному объекту, такому как туннель, здание, дерево, холм и т.д., но также соответствует определенному положению вообще.
Базы данных цифровой карты DMD, также известные как гео-пространственные базы данных, навигационные карты или электронные карты, известны в предшествующем уровне техники. Базы данных цифровой карты DMD в обычном использовании в настоящее время могут включать в себя географические объекты (также называемые географическими пунктами), связанные с географическим(и) местоположением(ями), и, возможно, включать в себя некоторую форму географически связанной информации, такой как места, представляющие интерес (музей, ресторан), (подземные) стоянки, туннели, мосты и т.п. В этой заявке термин "база данных цифровой карты DMD" используется для обозначения всех видов электронных и цифровых карт.
Базы данных цифровой карты DMD могут включать в себя набор географических объектов и набор векторов, представляющий (части) дороги, соединяющие гео-пространственные объекты. База данных цифровой карты DMD может также включать в себя дополнительную информацию, например касающуюся типа дороги (шоссе, пешеходная дорога), максимальной допустимой скорости (50 км/ч, 100 км/ч), названий улиц, присутствия объектов, таких как туннели и подземные стоянки, и т.д. База данных цифровой карты DMD может также включать в себя информацию о типе окружающей среды (городской, сельский, лес, сельское хозяйство) и т.п.
База данных цифровой карты DMD может использоваться, чтобы вычислять навигационные инструкции для наведения пользователя к месту назначения, как упомянуто выше. В зависимости от текущего местоположения пользователя, как определено устройством позиционирования, часть цифровой базы данных карты DMD может быть отображена на дисплее.
База данных цифровой карты может представлять собой базы данных трехмерной цифровой карты 3DMD, содержащей трехмерную информацию, например о географических объектах, таких как здания, деревья, скалы, горы, туннели, (подземные) стоянки и т.д. База данных трехмерной цифровой карты 3DMD может далее включать в себя информацию о городских каньонах и/или городских моделях.
Такая база данных трехмерной цифровой карты 3DMD может включать в себя информацию о местоположении объектов, включая горизонтальные и вертикальные размеры таких объектов. База данных трехмерной цифровой карты 3DMD может также включать в себя информацию о форме таких географических объектов, которые могут, например, быть релевантными в случае здания, имеющего остроконечную крышу.
Варианты осуществления
Согласно варианту осуществления, устройство позиционирования PD выполнено с возможностью переключения с первого режима на второй режим с использованием информации от базы данных цифровой карты DMD или базы данных трехмерной цифровой карты 3DMD.
Согласно другому варианту осуществления, устройство позиционирования PD выполнено с возможностью переключения со второго режима на первый режим на основе информации базы данных цифровой карты DMD или базы данных трехмерной цифровой карты 3DMD.
Понятно, что второй режим может также исключительно использовать информацию от системы относительного позиционирования и не использовать никакой информации от системы абсолютного позиционирования. Это может, например, иметь место в ситуациях, где никакое абсолютное позиционирование невозможно, например в туннеле и т.п. В таком случае, когда устройство позиционирования PD находится во втором режиме, информация относительного позиционирования, как определено системой относительного позиционирования RPS, может быть только преобразована в абсолютное местоположение с использованием начального местоположения, описанного выше, например, являющегося ранее определенным абсолютным местоположением, определенным в первом режиме, или системой абсолютного позиционирования.
Согласно предшествующему уровню техники, переключение из первого режима во второй режим запускалось на основе идентификации того, что качество или точность местоположения, как определено, относительно низки, например, потому что было принято меньше радиосигналов. Однако в результате переключения из первого режима во второй режим, когда определенное положение является недостаточно точным, начальное местоположение, используемое в качестве базы для системы относительного позиционирования, имеет относительное низкое качество или является относительно неточным. Это может, например, иметь место потому, что переключение из первого во второй режим выполнялось в момент, когда устройство позиционирования PD уже вошло в туннель TU. Поэтому все местоположения, определенные с использованием системы относительного позиционирования, являются относительно неточными из-за относительно неточного начального местоположения.
Согласно вариантам осуществления, предусмотренным здесь, переключение из первого режима во второй режим выполняется более сложным способом, то есть прежде, чем качество местоположения, как определено в первом режиме, уменьшилось слишком сильно. Переключение из первого во второй режим запускается с использованием информации из базы данных цифровой карты DMD или базы данных трехмерной цифровой карты 3DMD.
Кроме того, согласно вариантам осуществления, предусмотренным здесь, переключение из второго в первый режим выполняется, когда качество местоположения, как определено первым режимом, достаточно высоко. Переключение из второго в первый режим запускается с использованием информации из базы данных цифровой карты DMD или базы данных трехмерной цифровой карты 3DMD.
С использованием информации из базы данных цифровой карты время переключения из одного режима в другой может быть рассчитано более точно, приводя к более точной информации позиционирования.
Вариант осуществления 1
Согласно варианту осуществления, база данных цифровой карты DMD может включать в себя географический объект, такой как местоположение, например, туннеля TU, или положение дерева, здания, виадука и т.п. Вместе с этим географическим объектом в базе данных цифровой карты DMD может быть сохранено пороговое расстояние, например, 50 метров, указывая, что качество позиционирования в первом режиме является низким в пределах этого расстояния от туннеля TU, и устройство позиционирования PD должно переключаться из первого режима во второй режим при нахождении на расстоянии меньшем, чем, например, расстояние 50 метров от туннеля TU.
Каждый определенный географический объект может иметь свой собственный порог, ассоциированный с ним. Таким образом, стандартные пороговые расстояния могут быть предусмотрены для определенного типа географических объектов, такие как 50 метров для туннелей и 30 метров для деревьев.
Согласно такому варианту осуществления, устройство позиционирования PD может иметь доступ к базе данных цифровой карты DMD. На основе информации, сохраненной в базе данных цифровой карты DMD, для каждого местоположения устройства позиционирования PD, устройство позиционирования PD может вычислить, не окажется ли оно слишком близко к географическому объекту, и качество местоположений, как определяется в первом режиме, вероятно, ухудшится слишком значительно. Когда устройство позиционирования PD определяет, что оно находится слишком близко к объекту, устройство позиционирования PD переключается на второй режим.
Также, когда устройство позиционирования PD находится во втором режиме и устройство позиционирования PD обнаруживает, что оно больше не находится в пределах порогового расстояния от географического объекта, оно может переключиться назад из второго режима в первый режим.
Разумеется, этот вариант осуществления мог бы также работать в комбинации с базой данных трехмерной цифровой карты 3DMD, содержащей пороговые расстояния.
Блок-схема последовательности операций 1
Фиг.3 схематично представляет блок-схему последовательности операций, изображающую действия, которые могут выполняться устройством позиционирования PD или блоком обработки PU согласно варианту осуществления.
В первом действии 100 устройство позиционирования PD может начать исполнение блок-схемы последовательности операций, как описано здесь. Начало может быть инициировано вручную пользователем или может, например, быть инициировано включением устройства позиционирования PD.
Во втором действии 101 устройство позиционирования PD определяет свое местоположение в первом режиме, используя ввод из системы абсолютного позиционирования APS и, возможно, из системы относительного позиционирования RPS.
Как только местоположение определено, устройство позиционирования PD может вычислить свое расстояние до ближайших географических объектов, имеющее порог, ассоциированный с ним, например, все такие географические объекты в пределах дальности 100 метров. Это делается в действии 102. Для выполнения этого действия используется ввод из базы данных цифровой карты DMD.
В следующем действии 103 вычисленные расстояния до ближайших географических объектов сравниваются с соответствующими порогами расстояния, ассоциированными с географическими объектами.
Если устройство позиционирования PD не слишком близко к географическому объекту, то в действии 104 принимается решение возвратиться к действию 101 и определить обновленное местоположение в первом режиме. Если устройство позиционирования PD слишком близко к географическому объекту, то в действии 104 принимается решение перейти к действию 105 и определить обновленное местоположение во втором режиме.
После действий 101 и 105 выполняются действия 102, 103 и 104. Это гарантирует, что устройство позиционирования PD автоматически переключается из первого режима во второй режим и наоборот, когда необходимо и возможно.
Вариант осуществления 2
Согласно другому варианту осуществления, блок обработки PU может иметь доступ к базе данных трехмерной цифровой карты 3DMD. Согласно такому варианту осуществления, устройство позиционирования PD может вычислить, основываясь на трехмерной информации о географических объектах, сохраненных в базе данных трехмерной цифровой карты 3DMD для каждого положения блока обработки PU, является ли качество абсолютных местоположений, как определено системой абсолютного позиционирования, таким, что блок обработки PU должен будет переключиться во второй режим, в котором система абсолютного позиционирования APS взвешивается с меньшим весом.
Таким образом, в то время как первый вариант осуществления использует предопределенные пороговые расстояния, которые сохранены в базе данных цифровой карты или базе данных трехмерной цифровой карты, согласно данному варианту осуществления, переключение из одного режима в другой определяется на месте, используя информацию из базы данных трехмерной цифровой карты.
Блок обработки PU может, например, вычислить, когда он достигнет или достиг положения, где, вероятно, возникнет искажение многолучевого распространения. Понятно, что блок обработки PU имеет сведения о текущих местоположениях спутников SA1, SA2, SA3, от которых принимаются сигналы, так как эта информация содержится в сигналах (орбитальная информация). Используя эту информацию в комбинации с формой и размером географических объектов близко к последнему определенному положению, которое сохранено в базе данных трехмерной цифровой карты 3DMD, блок обработки PU может вычислить, для каких спутников, вероятно, произойдет искажение многолучевого распространения, путем применения простых геометрических соотношений.
Согласно альтернативе, блок обработки PU может, например, вычислить, когда он достигнет или достиг местоположения, где слишком мало сигналов может приниматься непосредственно (то есть без искажения многолучевого распространения) от спутников SA1, SA2, SA3, чтобы вычислить местоположение с достаточной точностью. Чтобы сделать это, блок обработки PU выполнен с возможностью вычисления, какие спутники не испытывают искажения многолучевого распространения, а какие спутники действительно испытывают искажение многолучевого распространения. Это вычисление объясняется более подробно ниже. Основываясь на результате, блок обработки PU может принять решение переключиться из первого режима во второй режим, в котором система относительного позиционирования RPS более акцентирована.
Вновь, блок обработки PU имеет сведения о текущих местоположениях спутников SA1, SA2, от которых принимаются сигналы (с искажением многолучевого распространения или без него), так как эта информация содержится в сигналах (орбитальная информация). Используя эту информацию в комбинации с формой и размером географических объектов близко к последнему определенному местоположению, которое сохранено в базе данных трехмерной цифровой карты 3DMD, блок обработки PU может вычислить, от каких спутников сигналы могут быть приняты без искажения многолучевого распространения, применяя простые геометрические соотношения.
Таким образом, согласно этому варианту осуществления устройство позиционирования PD может предсказать, основываясь на информации из базы данных трехмерной цифровой карты 3DMD, что оно достигнет местоположения, в котором предпочтительнее находиться в определенном режиме (первом режиме или втором режиме). В ответ на это устройство позиционирования PD может переключить режим, когда это местоположение должно быть вскоре достигнуто или было достигнуто.
Определение качества сигналов
Как описано выше, блок обработки PU может быть выполнен с возможностью определения, какие из спутников SA1, SA2, SA3 являются наблюдаемыми, какие невидимы или испытывают искажение многолучевого распространения. Блок обработки PU может вычислить это с использованием информации о следующем:
a) местоположение устройства позиционирования PD,
b) местоположение соответствующего спутника и
с) база данных трехмерной цифровой карты 3DMD.
Местоположение устройства позиционирования PD, используемого для вычисления того, какие спутники SA1, SA2, SA3 наблюдаются, невидимы или испытывают искажение многолучевого распространения, является самым последним местоположением, определенным устройством позиционирования PD, например, в предыдущем определении местоположения. Местоположение может также быть оцененным местоположением, то есть местоположением, которое, по оценке, достигается через одну секунду. Это может быть сделано на основе экстраполяции скорости и направления движения, возможно, в комбинации с методами согласования с картой, и с использованием информации о запланированном маршруте.
Местоположение соответствующего спутника SA1, SA2 может быть вычислено на основе орбитальной информации, как принято от соответствующих спутников SA1, SA2. Используя эту информацию, может быть вычислен угол возвышения α, который указывает, под каким углом может наблюдаться соответствующий спутник SA1, SA2 относительно горизонтали. Также может быть определено, в каком направлении β может наблюдаться соответствующий спутник SA1, SA2, например, в западном направлении (270° относительно направления на север).
База данных трехмерной цифровой карты 3DMD находится в памяти, на носителе данных и т.д., как описано выше.
Вся эта информация может использоваться для вычисления, возможна ли непосредственная связь между устройством позиционирования PD и спутником SA1, SA2, и может ли возникнуть искажение многолучевого распространения при использовании базовой гониометрической математики. Понятно, что в случае, если система позиционирования является наземной системой, местоположения передатчиков могут быть фиксированными и могут быть известны устройству позиционирования PD. В этом случае их местоположения нужно определить однократно, а не определять периодически.
Кроме того, поверхностные свойства объектов, сохраненных в базе данных трехмерной цифровой карты 3DMD (например, здания), могут содержаться в базе данных трехмерной цифровой карты и использоваться для принятия решения об ожидаемой интенсивности многолучевого распространения.
На основе этого вычисления может вычисляться мера качества абсолютного местоположения, как определено системой абсолютного позиционирования APS, и сравниваться с пороговым качеством. Если качество абсолютного местоположения, как определено системой абсолютного позиционирования APS, ниже порогового качества, устройство позиционирования PD может переключиться из первого режима во второй режим. При нахождении во втором режиме, и если качество абсолютного местоположения, как определено системой абсолютного позиционирования APS, выше порогового качества, устройство позиционирования PD может переключиться из второго режима в первый режим.
Качество системы абсолютного позиционирования APS может быть определено, принимая во внимание число спутников, от которых могут быть приняты прямые сигналы, их угол над горизонтом (спутники под малыми углами обычно предоставляют информацию относительно низкого качества), их пространственное распределение на небесной сфере.
Эта информация может использоваться для переключения из первого режима до второй режим, прежде чем качество или точность местоположения, определенного в первом режиме, вероятно, уменьшится слишком сильно, например уменьшится ниже предопределенного порога. Кроме того, эта информация может использоваться, чтобы переключиться из второго режима в первый режим, если возможно.
Блок-схема последовательности операций 2
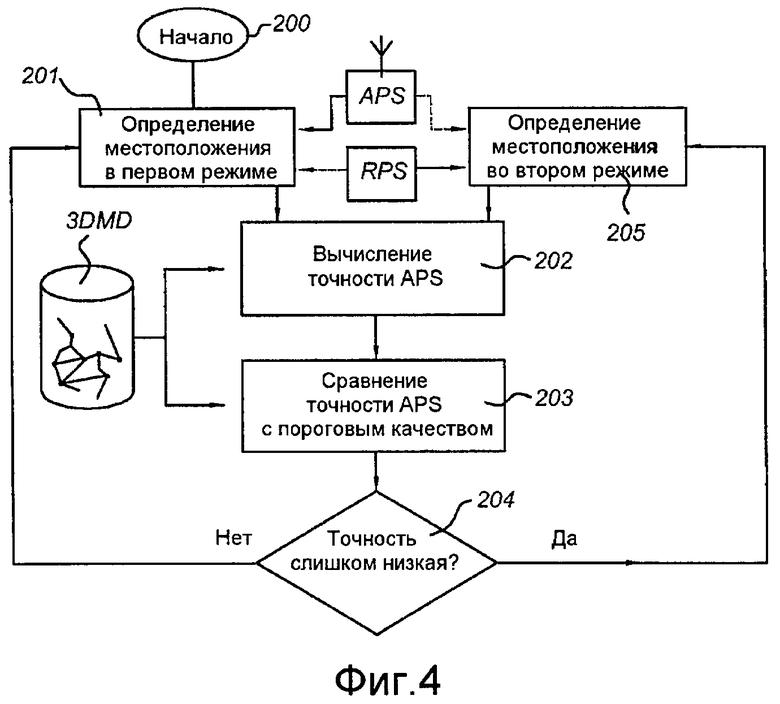
Фиг.4 схематично изображает блок-схему последовательности операций, изображающую действия, как может быть выполнено устройством позиционирования PD или блоком обработки PU согласно варианту осуществления.
В первом действии 200 устройство позиционирования PD может начать выполнять блок-схему последовательности операций, как описано здесь. Начало может быть инициировано вручную пользователем или может, например, быть вызвано включением устройства позиционирования PD.
Во втором действии 201 устройство позиционирования PD определяет свое местоположение в первом режиме, как схематично изображено на фиг.4.
Как только местоположение определено, устройство позиционирования PD может вычислить качество системы абсолютного позиционирования APS для этого местоположения. Это делается в действии 202. Для выполнения этого действия используется ввод из базы данных трехмерной цифровой карты 3DMD географических объектов, в комбинации с местоположениями спутников SA1, SA2, с применением простых геометрических соотношений.
В следующем действии 203 вычисленное качество местоположения, определенного на основе системы абсолютного позиционирования APS, сравнивается с пороговым качеством.
Если качество достаточно высоко, в действии 204 принимается решение возвратиться к действию 201 и определить обновленное положение в первом режиме. Если качество слишком низко, в действии 204 принимается решение перейти к действию 205 и определить обновленное местоположение во втором режиме.
После действий 201 и 205 выполняются действия 202, 203 и 204. Это гарантирует, что устройство позиционирования PD автоматически переключается из первого режима во второй режим и наоборот, когда необходимо и возможно.
Вариант осуществления 3
Согласно другому варианту осуществления, устройство позиционирования PD может быть выполнено с возможностью поддержки файла истории, содержащего определенные местоположения и ассоциированные точности, как определено согласно системе абсолютного позиционирования APS, а также измерения, определенные системой относительного позиционирования RPS.
Например, устройство позиционирования PD может быть выполнено с возможностью поддержки файла истории по определенному расстоянию, например последним 200 метрам. Или устройство позиционирования PD может быть выполнено с возможностью поддержки файла истории во время определенного временного интервала, например за последнюю минуту.
Этот файл истории может использоваться при переключении из первого режима во второй режим. Так как второй способ в большей степени полагается на информацию из системы относительного позиционирования RPS, точность его в большой степени зависит от местоположения, которое используется в качестве начального местоположения для системы относительного позиционирования RPS.
При переключении из первого режима во второй режим устройство позиционирования PD может быть выполнено с возможностью проверки файла истории и выбора на основе информации, содержащейся в файле истории, того, какое положение должно использоваться в качестве начального местоположения для второго режима.
Например, в случае, если точность первого местоположения, определенного за 50 метров до переключения, очень высока, а второе местоположение, определенное близко к переключению (например, за 5 метров), имеет очень низкую точность, может быть более правильным использовать первое местоположение в качестве начального местоположения, а не второе местоположение, хотя это второе местоположение намного ближе к положению переключения из первого во второй режим.
Чтобы использовать это первое местоположение как начальное местоположение, для устройства позиционирования PD также необходимо сохранять измерения системы относительного позиционирования RPS между первым положением и положением переключения, чтобы иметь возможность вычислять дальнейшие местоположения во втором режиме.
Понятно, что устройство позиционирования PD может быть выполнено с возможностью поддержки файла истории, если географический объект, который может привести к переключению, приближается. Устройство позиционирования PD может вычислить, приближается ли такой географический объект, на основе экстраполяции скорости и направления или на основе запланированного маршрута.
Блок-схема последовательности операций 3
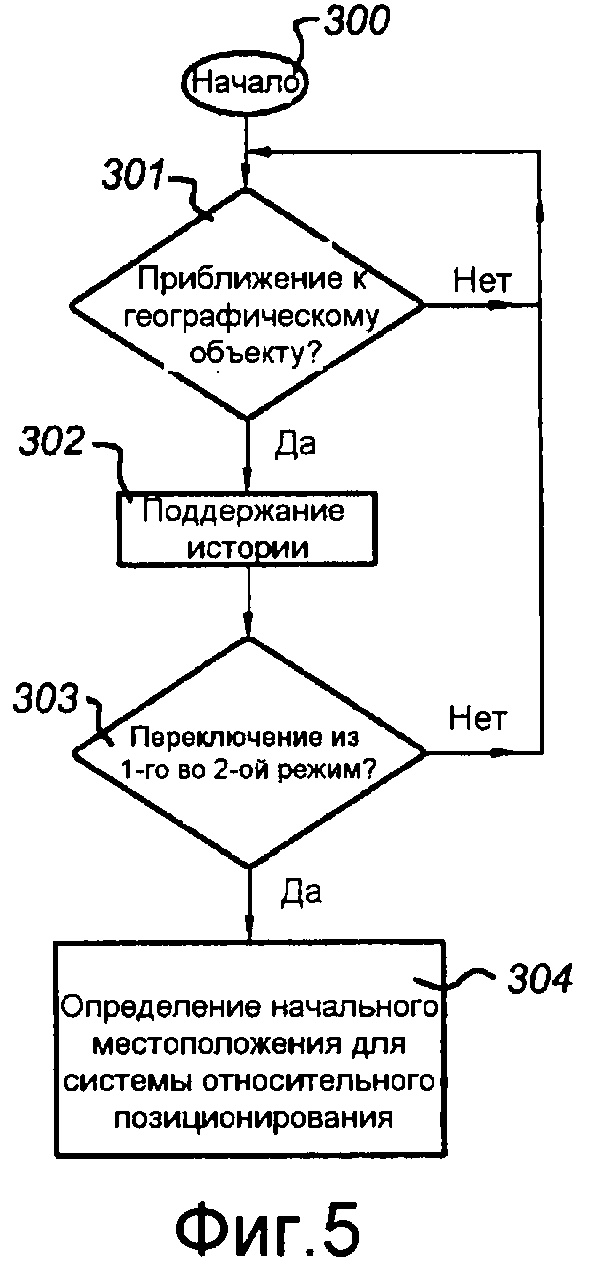
Фиг.5 схематично изображает блок-схему последовательности операций, которая может быть выполнена устройством позиционирования PD, чтобы выполнить вариант осуществления, описанный здесь.
В первом действии 300 начинает выполняться блок-схема последовательности операций. В следующем действии 301 определяется, приближается ли географический объект, который может вызвать переключение между режимами. Если нет, то устройство позиционирования PD возвращается к действию 301. Если да, то устройство позиционирования PD начинает поддерживать файл истории в действии 302.
В действии 303 определяется, переключается ли устройство позиционирования PD из первого режима во второй режим. Если никакого переключения не выполняется в пределах предопределенного временного интервала или дистанции пути, устройство позиционирования PD возвращается к действию 303.
Если переключение выполнено из первого режима во второй режим, в действии 304 устройство позиционирования PD определяет, каково наилучшее начальное местоположение для системы относительного позиционирования RPS.
Вариант осуществления 4
Как описано выше, географические объекты могут использоваться, чтобы принимать решение, когда выполнить переключение между первым и вторым режимом. Эти географические объекты могут соответствовать реальному объекту, который может оказывать влияние на систему абсолютного позиционирования APS, такому как туннель, здание, дерево, холм и т.д.
Географические объекты (также называемые географическими пунктами) могут также быть местоположением, для которого известно, что один режим является более предпочтительным, чем другой, и местоположение не обязательно соответствует или связано с реальным объектом, таким как туннель, здание, дерево, холм и т.д.
Согласно варианту осуществления, устройство позиционирования PD выполнено с возможностью добавления географических объектов к базе данных цифровой карты DMD на основе измерений систем абсолютного и относительного позиционирования и ассоциированных точностей в прошлом. Согласно такому варианту осуществления, устройство позиционирования PD выполнено с возможностью вычисления и регистрации точностей определенных местоположений и режима, в котором были определены местоположения.
Если обнаружено, что точность определенного местоположения или диапазон местоположений (например, в туннеле), например, в первом режиме ниже определенного порога, это местоположение может быть сохранено как географический объект, с рекомендованным режимом (например, второй режим), ассоциированным с ним. Устройство позиционирования PD может также быть выполнено с возможностью сохранения такого местоположения как географического объекта с рекомендованным режимом, назначенным ему, только если определенная точность определенного местоположения в одном режиме ниже порога более чем в предопределенное число раз (например, 5 раз) или более чем предопределенный процент времени (например, более чем 50% случаев определения местоположения).
Этот вариант осуществления обеспечивает самообучающееся устройство позиционирования PD, которое может добавлять местоположения к базе данных цифровой карты DMD или базе данных трехмерной цифровой карты 3DMD, для которых известно на основе предыдущих измерений, что определение местоположения в определенном режиме наиболее вероятно приведет к относительно низкой точности, и поэтому устройство позиционирования PD может переключиться на другой режим, прежде чем такое местоположение будет достигнуто. Это может привести к более точному позиционированию.
Взвешенная информация точности может быть связана с базой данных трехмерной карты DMD/3DMD и возвращена провайдеру карты для включения в более новые поколения базы данных трехмерной карты DMD/3DMD или широковещательно передана провайдеру услуг для распределения назад к новым пользователям. Кроме того, информация может быть широковещательно передана непосредственно пользователям, находящимся поблизости для совместного использования водителями.
Так, другие водители, которые не осведомлены о предстоящих пропаданиях сигналов систем абсолютного позиционирования (в туннелях, из-за линий электропередачи), могут узнать об этом и предпринять необходимые меры предосторожности: переключиться на второй режим.
Информация может быть введена в базу данных цифровой карты DMD провайдером карты или оперативно распределена центру обслуживания, который затем распределяет ее другим водителям. Кроме того, эта информация может быть широковещательно передана непосредственно на транспортные средства в окрестности, которые могут сохранить информацию в их локальной базе данных цифровой карты DMD для дальнейшего использования, как описано выше.
Дополнительные замечания
В обоих вариантах осуществления, описанных выше, решение о переключении из первого режима во второй режим и наоборот принимается на основе ранее определенного местоположения в комбинации с информацией, сохраненной в базе данных цифровой карты. Согласно одному варианту осуществления, также может использоваться информация о местоположении спутников.
Понятно, что хотя варианты осуществления, приведенные выше, описывают устройство позиционирования PD, использующее первый и второй режим, устройство позиционирования PD может также быть выполнено с возможностью работы в дополнительных режимах, таких как третий, четвертый и т.д. режим. В этих дополнительных режимах взвешивание для систем абсолютного и относительного позиционирования может быть отличающимся от используемого в первом и втором режимах. Кроме того, режимы могут отличаться тем, что используется отличающийся набор систем относительного позиционирования RPS. Например, во втором режиме устройство позиционирования PD может использовать компас и измеритель скорости, а в третьем режиме также используется акселерометр. Понятно, что возможны изменения любого рода.
Поэтому должно быть понятно, что устройство позиционирования PD может также быть выполнено с возможностью переключения между первым, вторым и дополнительными режимами, основываясь на определенном местоположении в комбинации с информацией, сохраненной в базе данных цифровой карты (DMD, 3DMD). Географические объекты также могут иметь рекомендованный режим, ассоциированный с ними, указывая, в какой режим устройство позиционирования PD должно переключиться при приближении к такому географическому объекту.
Информация, сохраненная в базе данных цифровой карты DMD, 3DMD, которая вызывает переключение из первого режима во второй режим или наоборот, может также включать в себя временной параметр, указывающий, что переключение должно быть выполнено только в определенные моменты времени. Например, наличие листвы на деревьях может блокировать прием сигналов для использования системой абсолютного позиционирования APS только с весны до осени или с весны до лета.
Понятно, что хотя вышеописанные варианты осуществления представлены как отдельные варианты осуществления, на практике также могут использоваться их комбинации.
Понятно, что описанные варианты осуществления могут быть предусмотрены как компьютерная программа, которая, при загрузке на компьютерное устройство, обеспечивает выполнение любого из вариантов осуществления, описанных выше. Такая компьютерная программа может быть обеспечена на носителе данных, таком как машиночитаемый носитель, например, дискета, карта памяти, компакт-диск (CD), цифровой видеодиск (DVD) и т.д.
С целью изучения изобретения были описаны предпочтительные варианты осуществления способа и устройства согласно изобретению. Для специалиста в данной области техники должно быть понятно, что другие альтернативные и эквивалентные варианты осуществления изобретения могут быть созданы и реализованы на практике без отступления от сущности изобретения, при этом объем изобретения ограничен только приложенной формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ НА ЦИФРОВОЙ МОДЕЛИ ПУТЕВОГО РАЗВИТИЯ СТАНЦИИ | 2012 |
|
RU2503567C1 |
| АВТОНОМНАЯ ОПТИЧЕСКАЯ СИСТЕМА ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ И НАВИГАЦИИ | 2023 |
|
RU2816087C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2018 |
|
RU2691212C1 |
| СПОСОБ ОБРАБОТКИ ДАННЫХ ПОЗИЦИОНИРОВАНИЯ | 2008 |
|
RU2501087C2 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ | 2014 |
|
RU2568071C1 |
| СПОСОБ УЛУЧШЕНИЯ ЭФФЕКТИВНОСТИ ФУНКЦИОНИРОВАНИЯ СИСТЕМЫ ПОЗИЦИОНИРОВАНИЯ И СИСТЕМА ПОЗИЦИОНИРОВАНИЯ В СИСТЕМЕ МОБИЛЬНОЙ СВЯЗИ | 2009 |
|
RU2467518C2 |
| СПОСОБ ОБРАБОТКИ ДАННЫХ ПОЗИЦИОНИРОВАНИЯ | 2008 |
|
RU2486473C2 |
| Гидроакустический комплекс позиционирования и связи для навигационно-информационного обеспечения автономных необитаемых подводных аппаратов | 2023 |
|
RU2812089C1 |
| Способ навигации с интеграцией систем и средств обеспечения сквозного позиционирования повышенной точности и устойчивости к помехам | 2023 |
|
RU2836625C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНОГО РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА НА ЖЕЛЕЗНОДОРОЖНОМ ПУТИ | 2015 |
|
RU2579606C1 |
Изобретение относится к радиолокации и может быть использовано для определения местоположения с использованием системы абсолютного позиционирования и системы относительного позиционирования. Технический результат заключается в повышении точности получения информации о местоположении. Для этого устройство позиционирования выполнено с возможностью работы в двух режимах: первом, с использованием преимущественно информации, получаемой от системы абсолютного позиционирования, и втором, с использованием преимущественно информации, получаемой от системы относительного позиционирования. Выбор основного источника информации производится исходя из определенного ранее местоположения и качества получаемого от системы абсолютного позиционированного сигнала, а также информации, хранящейся в базе данных цифровой карты, причем эта информация включает в себя данные о пороговых расстояниях для различных географических объектов, и при приближении к объектам, пороговые расстояния до которых известны, производится переключение в режим с использованием преимущественно информации, получаемой от системы относительного позиционирования, еще до того, как качество получаемого от системы абсолютного позиционирования сигнала существенно снизится. 3 н. и 15 з.п. ф-лы, 5 ил.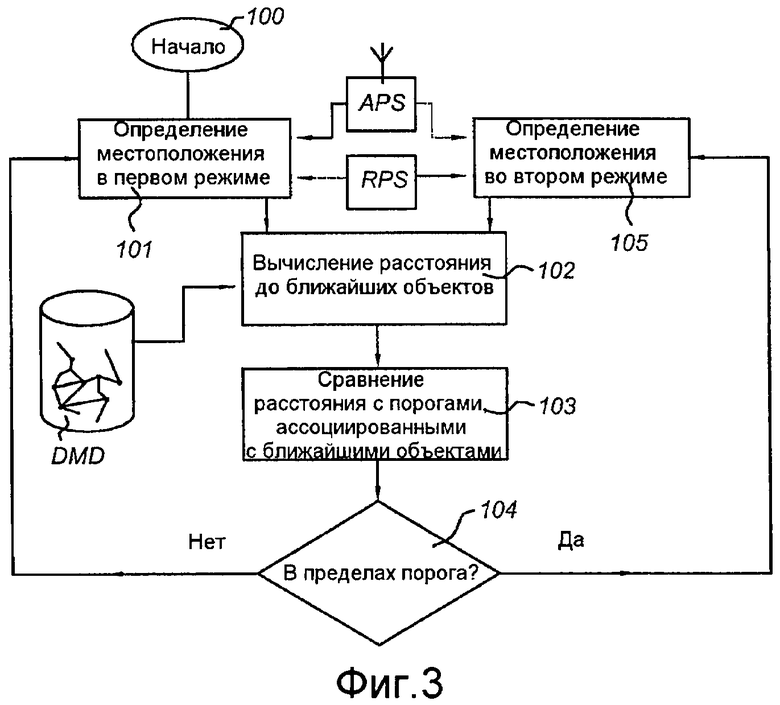
1. Устройство позиционирования (PD), выполненное с возможностью определения местоположения с использованием системы абсолютного позиционирования и системы относительного позиционирования и дополнительно выполненное с возможностью работы
в первом режиме, в котором местоположение определяется с использованием системы абсолютного позиционирования и, возможно, системы относительного позиционирования, и
во втором режиме, в котором местоположение определяется с использованием системы относительного позиционирования и, возможно, системы абсолютного позиционирования,
причем в первом режиме система абсолютного позиционирования взвешивается с большим весом, чем во втором режиме, для определения местоположения, и устройство позиционирования выполнено с возможностью переключения из первого режима во второй режим,
отличающееся тем, что устройство позиционирования (PD) включает в себя или имеет доступ к базе данных цифровой карты (DMD, 3DMD), и решение о переключении из первого во второй режим принимается на основе, по меньшей мере, определенного местоположения в комбинации с информацией, хранящейся в базе данных цифровой карты (DMD, 3DMD), причем упомянутая информация содержит множество географических объектов, имеющих ассоциированные с ними данные, которые представляют собой одно из:
порогового расстояния,
данных, исходя из которых может быть вычислено пороговое расстояние,
при этом упомянутые пороговые расстояния указывают область, в которой качество позиционирования в первом режиме может быть относительно низким,
и устройство позиционирования (PD) дополнительно отличается тем, что выполнено с возможностью вычисления, по меньшей мере, одного расстояния от определенного местоположения до, по меньшей мере, одного из множества географических объектов, и переключения из первого режима во второй режим, осуществляемого, если, по меньшей мере, одно из вычисленных расстояний меньше соответствующего порогового расстояния.
2. Устройство позиционирования (PD) по п.1, в котором система абсолютного позиционирования (APS) является одной из спутниковой системы позиционирования (GNSS) и наземной системы позиционирования.
3. Устройство позиционирования (PD) по п.1, в котором система относительного позиционирования (RPS) является, по меньшей мере, одним из гироскопа, акселерометра, компаса, модуля измерения скорости, измерителя расстояния, инклинометра и модуля, обнаруживающего управляющие действия рулевого колеса.
4. Устройство позиционирования (PD) по п.2, в котором система абсолютного позиционирования (APS) выполнена с возможностью определения местоположения на основе сигналов, принятых от множества передатчиков (SA1, SA2, SA3), являющихся частью спутниковой системы позиционирования (GNSS) или наземной системы позиционирования.
5. Устройство позиционирования (PD) по п.4, в котором база данных цифровой карты (3DMD) представляет собой базу данных трехмерной цифровой карты (3DMD), и информация включает в себя трехмерную информацию о географических объектах,
причем устройство позиционирования (PD) выполнено с возможностью вычисления качества местоположения, как определено системой абсолютного позиционирования (APS), основываясь на, по меньшей мере, одном из определенного местоположения, местоположения передатчиков (SA1, SA2, SA3) и базы данных трехмерной цифровой карты (DMD, 3DMD).
6. Устройство позиционирования (PD) по п.4 или 5, в котором устройство позиционирования (PD) выполнено с возможностью определения соответствующих местоположений передатчиков (SA1, SA2, SA3) на основе информации местоположения, содержащейся в соответствующих сигналах.
7. Устройство позиционирования (PD) по п.1, в котором решение о дополнительном переключении из второго в первый режим принимается на основе определенного местоположения в комбинации с информацией, сохраненной в базе данных цифровой карты.
8. Устройство позиционирования (PD) по п.1, в котором устройство позиционирования (PD) выполнено с возможностью поддержания файла истории, включающего в себя ранее определенные местоположения и ассоциированные точности, как определено согласно системе абсолютного позиционирования (APS), и если выполняется переключение из первого режима во второй режим, устройство позиционирования (PD) выполнено с возможностью выбора начального местоположения для системы относительного позиционирования (RPS) из файла истории.
9. Устройство позиционирования (PD) по п.1, в котором устройство позиционирования (PD) выполнено с возможностью определения точностей определенных местоположений в одном режиме, сравнения определенной точности местоположений с пороговым значением и в случае, если точность ниже порогового значения, сохранения этих местоположений в качестве географического объекта с рекомендованным режимом, ассоциированным с ним, причем рекомендованный режим отличается от упомянутого одного режима.
10. Способ определения местоположения, причем способ содержит определение местоположения с использованием системы абсолютного позиционирования и системы относительного позиционирования, причем местоположение может быть определено
в первом режиме, в котором местоположение определяется с использованием системы абсолютного позиционирования и, возможно, системы относительного позиционирования, и
во втором режиме, в котором местоположение определяется с использованием системы относительного позиционирования и, возможно, системы абсолютного позиционирования,
в первом режиме система абсолютного позиционирования взвешивается с большим весом для определения местоположения, чем во втором режиме, причем способ дополнительно содержит переключение из первого режима во второй режим, отличающийся тем, что способ содержит действие принятия решения, следует ли переключиться из первого режима во второй режим, на основе определенного местоположения в комбинации с информацией, сохраненной в базе данных цифровой карты (DMD, 3DMD), причем упомянутая информация содержит множество географических объектов, имеющих ассоциированные с ними данные, которые представляют собой одно из:
порогового расстояния,
данных, исходя из которых может быть вычислено пороговое расстояние,
при этом упомянутые пороговые расстояния указывают область, в которой качество позиционирования в первом режиме может быть относительно низким,
и способ определения местоположения дополнительно отличается тем, что содержит вычисление, по меньшей мере, одного расстояния от определенного местоположения до, по меньшей мере, одного из множества географических объектов, и переключение из первого режима во второй режим, осуществляемое, если, по меньшей мере, одно из вычисленных расстояний меньше соответствующего порогового расстояния.
11. Способ по п.10, в котором система абсолютного позиционирования (APS) является одной из спутниковой системы позиционирования (GNSS) и наземной системы позиционирования.
12. Способ по п.10, в котором система относительного позиционирования (RPS) является, по меньшей мере, одним из гироскопа, акселерометра, компаса, модуля измерения скорости, измерителя расстояния, модуля, обнаруживающего управляющие действия рулевого колеса, и инклинометра.
13. Способ по п.10, в котором система абсолютного позиционирования (APS) выполнена с возможностью определения местоположения на основе сигналов, принятых от множества передатчиков (SA1, SA2, SA3), являющихся частью спутниковой системы позиционирования (GNSS) или наземной системы позиционирования.
14. Способ по п.13, в котором база данных цифровой карты (3DMD) представляет собой базу данных трехмерной цифровой карты (3DMD), и информация включает в себя трехмерную информацию о географических объектах, причем способ содержит
вычисление качества местоположения, как определено системой абсолютного позиционирования (APS), основываясь на, по меньшей мере, одном из определенного местоположения, местоположения передатчиков (SA1, SA2, SA3) и базы данных трехмерной цифровой карты (DMD, 3DMD).
15. Способ по п.13 или 14, причем способ дополнительно содержит определение соответствующих местоположений передатчиков (SA1, SA2, SA3) на основе информации местоположения, содержащейся в соответствующих сигналах.
16. Способ по п.10, причем способ дополнительно содержит
поддержание файла истории, включающего в себя ранее определенные местоположения и ассоциированные точности, как определено согласно системе абсолютного позиционирования (APS) и системе относительного позиционирования (RPS), и если выполняется переключение из первого режима во второй режим,
выбор начального местоположения для системы относительного позиционирования (RPS) из файла истории.
17. Способ по п.10, причем способ дополнительно содержит
определение точности определенных местоположений в одном режиме,
сравнение определенной точности местоположений с пороговым значением и в случае, если точность ниже порогового значения,
сохранение этих местоположений в качестве географического объекта с рекомендованным режимом, ассоциированным с ним, причем рекомендованный режим отличается от упомянутого одного режима.
18. Машиночитаемый носитель данных, содержащий компьютерную программу, которая, при загрузке в компьютерное устройство, обеспечивает выполнение компьютерным устройством способа определения местоположения по любому из пп.10-17.
| US 2006189324 A1, 24.08.2006 | |||
| СИСТЕМА ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ С САНКЦИОНИРОВАННЫМ ДОСТУПОМ В РЕЖИМЕ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК | 2000 |
|
RU2161317C1 |
| СПОСОБ И СИСТЕМА ПОЗИЦИОНИРОВАНИЯ | 1997 |
|
RU2161318C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2228542C1 |
| WO 2005071432 A1, 04.08.2005. | |||

