Изобретение относится к области вторичной обработки радиолокационных (РЛ) сигналов и может быть использовано для распознавания в импульсно-доплеровской радиолокационной станции (РЛС) типа самолета с турбореактивным двигателем (ТРД) при воздействии уводящей по скорости помехи.
Известен способ вторичной обработки РЛ сигналов, основанный на процедуре оптимальной многомерной линейной дискретной калмановской фильтрации [1].
Недостатком данного способа вторичной обработки РЛ сигналов является невозможность с его помощью распознать тип самолета с ТРД с вероятностью, не ниже заданной, в условиях воздействия или отсутствия воздействия уводящей по скорости помехи.
Известен способ распознавания типа самолета с ТРД, заключающийся в том, что сигнал, отраженный от самолета с ТРД, на промежуточной частоте с выхода приемника импульсно-доплеровской РЛС подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье (БПФ) и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планера самолета и вращающихся лопаток рабочего колеса компрессора низкого давления (КНД) его силовой установки, определяется отсчет доплеровской частоты, соответствующего максимальной амплитуде спектральной составляющей спектра сигнала, который обусловлен его отражением от планера самолета и поступающий на вход фильтра (ФСп) сопровождения, работающего в соответствии с процедурой оптимальной многомерной линейной дискретной калмановской фильтрацией, определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера самолета и поступающий на вход фильтра ФСк сопровождения первой компрессорной составляющей спектра сигнала, обусловленной его отражением от лопаток рабочего колеса первой ступени КНД, на каждом k-ом такте работы обоих фильтров ФСп и ФСк сопровождения определяется оценка разности  между оцененными значениями доплеровских частот, обусловленных отражениями от планера
между оцененными значениями доплеровских частот, обусловленных отражениями от планера  и лопаток рабочего колеса первой ступени
и лопаток рабочего колеса первой ступени  КНД силовой установки самолета, которая соответствует только одному типу самолета с ТРД, при этом весь диапазон возможных значений оценок разностей
КНД силовой установки самолета, которая соответствует только одному типу самолета с ТРД, при этом весь диапазон возможных значений оценок разностей  априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона (
априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона ( Q - максимальное количество распознаваемых типов самолетов с ТРД), соответствующего q-му типу самолета, определяются выражениями
Q - максимальное количество распознаваемых типов самолетов с ТРД), соответствующего q-му типу самолета, определяются выражениями


где
FРq - максимальная частота вращения ротора КНД силовой установки q-го типа самолета;
n1 и n2 - соответственно минимальное и максимальное значение величины относительных оборотов вращения ротора силовой установки, одинаковые для всех типов самолетов;
Nлq - количество лопаток рабочего колеса первой ступени КНД q-го типа самолета, за К промежуточных тактов работы обоих оптимальных фильтров вычисляется вероятность Pq попадания величины  в каждый из априорно сформированный q-й поддиапазон, затем определяется номер q-го поддиапазона, для которого величина вероятности Pq максимальна, максимальное значение величины Pq max сравнивается с пороговым значением вероятности распознавания типа самолета Рпор, при Pq max≥Рпор принимается решение о распознавании q-го типа самолета с ТРД с вероятностью Pq max, не ниже заданной, в противном случае принимается решение о невозможности распознавания типа самолета с заданной вероятностью.
в каждый из априорно сформированный q-й поддиапазон, затем определяется номер q-го поддиапазона, для которого величина вероятности Pq максимальна, максимальное значение величины Pq max сравнивается с пороговым значением вероятности распознавания типа самолета Рпор, при Pq max≥Рпор принимается решение о распознавании q-го типа самолета с ТРД с вероятностью Pq max, не ниже заданной, в противном случае принимается решение о невозможности распознавания типа самолета с заданной вероятностью.
Недостатком данного способа распознавания типа самолета с ТРД является невозможность с помощью его правильно распознать в импульсно-доплеровской РЛС с вероятностью, не ниже заданной, тип самолета при воздействии уводящей по скорости помехи.
Действительно, воздействие уводящей по скорости помехи приведет к искажению величины  следствием чего будет являться ее попадание в другой поддиапозон разностей из Q неперекрывающихся друг с другом поддиапазонов, который не соответствует истинному типу самолета, что в результате повлечет за собой неправильное распознавание типа самолета.
следствием чего будет являться ее попадание в другой поддиапозон разностей из Q неперекрывающихся друг с другом поддиапазонов, который не соответствует истинному типу самолета, что в результате повлечет за собой неправильное распознавание типа самолета.
Цель изобретения - распознать в импульсно-доплеровской РЛС с вероятностью, не ниже заданной, тип самолета с турбореактивным двигателем при воздействии уводящей по скорости помехи.
Для достижения цели в способе распознавания типа самолета с ТРД в импульсно-доплеровской РЛС при воздействии уводящей по скорости помехи, заключающимся в том, что сигнал, отраженный от самолета с ТРД, с выхода приемника импульсно-доплеровской РЛС на промежуточной частоте подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в амплитудно-частотный спектр, спектральные составляющие которого обусловлены отражениями сигнала от планера самолета с ТРД и вращающихся лопаток рабочего колеса КНД его силовой установки, определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который обусловлен его отражением от планера самолета, в первом калмановском фильтре в дискретном времени осуществляется оценка доплеровской частоты  обусловленной отражениями сигнала от планера самолета (где
обусловленной отражениями сигнала от планера самолета (где  - номер текущего такта работы калмановских фильтров; К - промежуточное количество тактов работы калмановских фильтров, по достижению которого определяется вероятность распознавания типа самолета), определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера самолета, во втором калмановском фильтре в дискретном времени осуществляется оценка доплеровской частоты
- номер текущего такта работы калмановских фильтров; К - промежуточное количество тактов работы калмановских фильтров, по достижению которого определяется вероятность распознавания типа самолета), определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера самолета, во втором калмановском фильтре в дискретном времени осуществляется оценка доплеровской частоты  обусловленной отражением сигнала от лопаток рабочего колеса первой ступени КНД силовой установки самолета, дополнительно в третьем калмановском фильтре в дискретном времени осуществляется оценка дальности
обусловленной отражением сигнала от лопаток рабочего колеса первой ступени КНД силовой установки самолета, дополнительно в третьем калмановском фильтре в дискретном времени осуществляется оценка дальности  до самолета на основе ее измерения в дальномере импульсно-доплеровской РЛС, вычисляется производная оценки дальности
до самолета на основе ее измерения в дальномере импульсно-доплеровской РЛС, вычисляется производная оценки дальности  вычисляется модуль разности оценок
вычисляется модуль разности оценок  - оценка доплеровской частоты, обусловленной отражениями сигнала от планера самолета и полученная на основе производной оценки дальности; λ - рабочая длина волны импульсно-доплеровской РЛС), осуществляется сравнение модуля разности оценок
- оценка доплеровской частоты, обусловленной отражениями сигнала от планера самолета и полученная на основе производной оценки дальности; λ - рабочая длина волны импульсно-доплеровской РЛС), осуществляется сравнение модуля разности оценок  доплеровских частот с порогом, близким к нулю, при его не превышении принимается решение об отсутствии воздействия уводящей по скорости помехи и формируется разность оценок
доплеровских частот с порогом, близким к нулю, при его не превышении принимается решение об отсутствии воздействия уводящей по скорости помехи и формируется разность оценок  в противном случае принимается решение о воздействии уводящей по скорости помехи и формируется разность оценок
в противном случае принимается решение о воздействии уводящей по скорости помехи и формируется разность оценок  весь диапазон возможных значений оценок разностей
весь диапазон возможных значений оценок разностей  априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона (где
априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона (где  Q - максимальное количество распознаваемых типов самолетов с ТРД), соответствующего q-му типу самолета, определяются выражениями (1) и (2), при принятии решения об отсутствии воздействия уводящей по скорости помехи за К промежуточных тактов работы калмановских фильтров вычисляется вероятность Pq попадания величины
Q - максимальное количество распознаваемых типов самолетов с ТРД), соответствующего q-му типу самолета, определяются выражениями (1) и (2), при принятии решения об отсутствии воздействия уводящей по скорости помехи за К промежуточных тактов работы калмановских фильтров вычисляется вероятность Pq попадания величины  в каждый из априорно сформированный q-й поддиапазон, определяется номер того q-го поддиапазона, для которого величина вероятности Pq максимальна, максимальное значение величины Pq max сравнивается с пороговым значением вероятности распознавания типа самолета Рпор, при Pq max≥Рпор принимается решение о распознавании q-го типа самолета с ТРД с вероятностью Pq max, не ниже заданной, при принятии решения о воздействии уводящей по скорости помехи за К промежуточных тактов работы калмановских фильтров вычисляется вероятность Pq попадания величины
в каждый из априорно сформированный q-й поддиапазон, определяется номер того q-го поддиапазона, для которого величина вероятности Pq максимальна, максимальное значение величины Pq max сравнивается с пороговым значением вероятности распознавания типа самолета Рпор, при Pq max≥Рпор принимается решение о распознавании q-го типа самолета с ТРД с вероятностью Pq max, не ниже заданной, при принятии решения о воздействии уводящей по скорости помехи за К промежуточных тактов работы калмановских фильтров вычисляется вероятность Pq попадания величины  в каждый из априорно сформированный q-й поддиапазон, определяется номер того q-го поддиапазона, для которого величина вероятности Pq максимальна, максимальное значение величины Pq max сравнивается с пороговым значением вероятности распознавания типа самолета Рпор, при Pq max≥Рпор принимается решение о распознавании q-го типа самолета с ТРД с вероятностью Pq max, не ниже заданной.
в каждый из априорно сформированный q-й поддиапазон, определяется номер того q-го поддиапазона, для которого величина вероятности Pq максимальна, максимальное значение величины Pq max сравнивается с пороговым значением вероятности распознавания типа самолета Рпор, при Pq max≥Рпор принимается решение о распознавании q-го типа самолета с ТРД с вероятностью Pq max, не ниже заданной.
Новыми признаками, обладающими существенными отличиями, являются:
1. Принятие решение о воздействии уводящей по скорости помехи или ее отсутствия на основе сравнения модуля разности оценок  с порогом, близким к нулю (при его превышении принимается решение о воздействии уводящей по скорости помехи, в противном случае - об ее отсутствии).
с порогом, близким к нулю (при его превышении принимается решение о воздействии уводящей по скорости помехи, в противном случае - об ее отсутствии).
2. Распознавание типа самолета с ТРД с вероятностью, не ниже заданной, после принятия решения об отсутствии воздействия уводящей по скорости помехи на основе анализа разности оценок  доплеровских частот.
доплеровских частот.
3. Распознавание типа самолета с ТРД с вероятностью, не ниже заданной, после принятия решения о воздействии уводящей по скорости помехи на основе анализа разности оценок  доплеровских частот.
доплеровских частот.
Данные признаки обладают существенными отличиями, так как в известных способах не обнаружены.
Применение новых признаков в совокупности с известными позволит распознать в импульсно-доплеровской РЛС с вероятностью, не ниже заданной, тип самолета с ТРД при воздействии уводящей по скорости помехи или ее отсутствии.
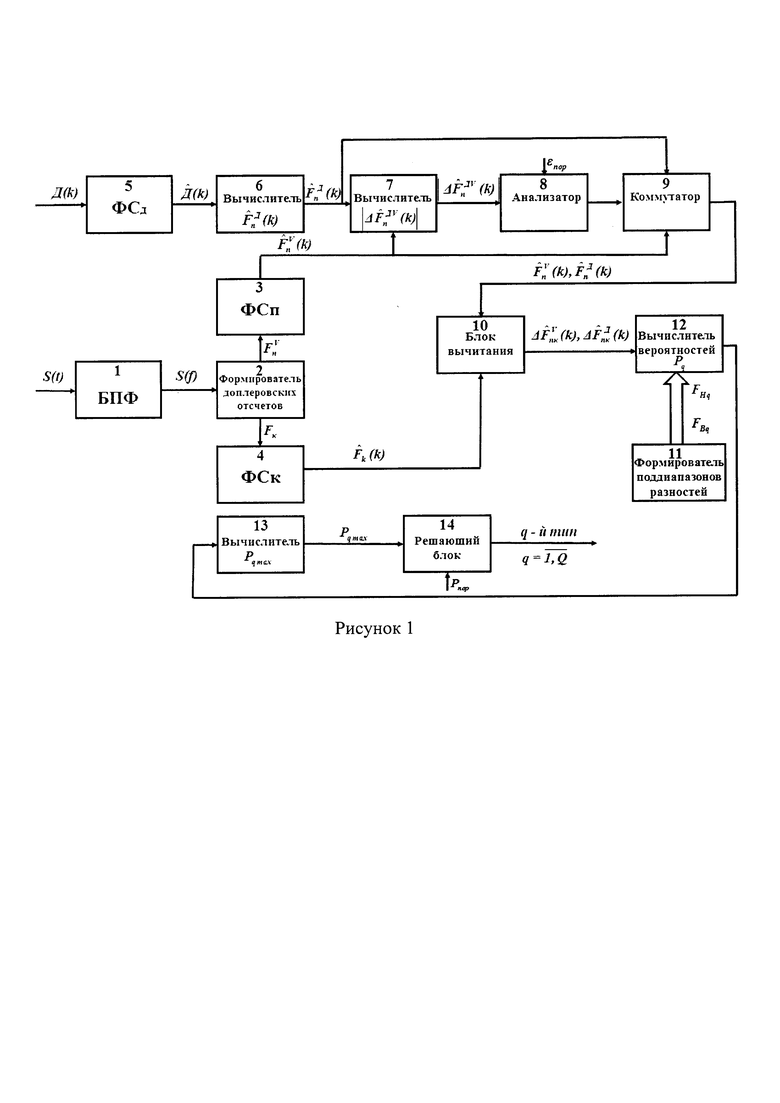
На рисунке 1 приведена блок-схема, поясняющая предлагаемый способ распознавания типа самолета с ТРД, на рисунке 2 (а, б, в, г) - эпюры, поясняющие процесс распознавания q-го типа самолета с ТРД.
Предлагаемый способ распознавания в импульсно-доплеровской РЛС типа самолета с ТРД при воздействии уводящей по скорости помехи осуществляется следующим образом.
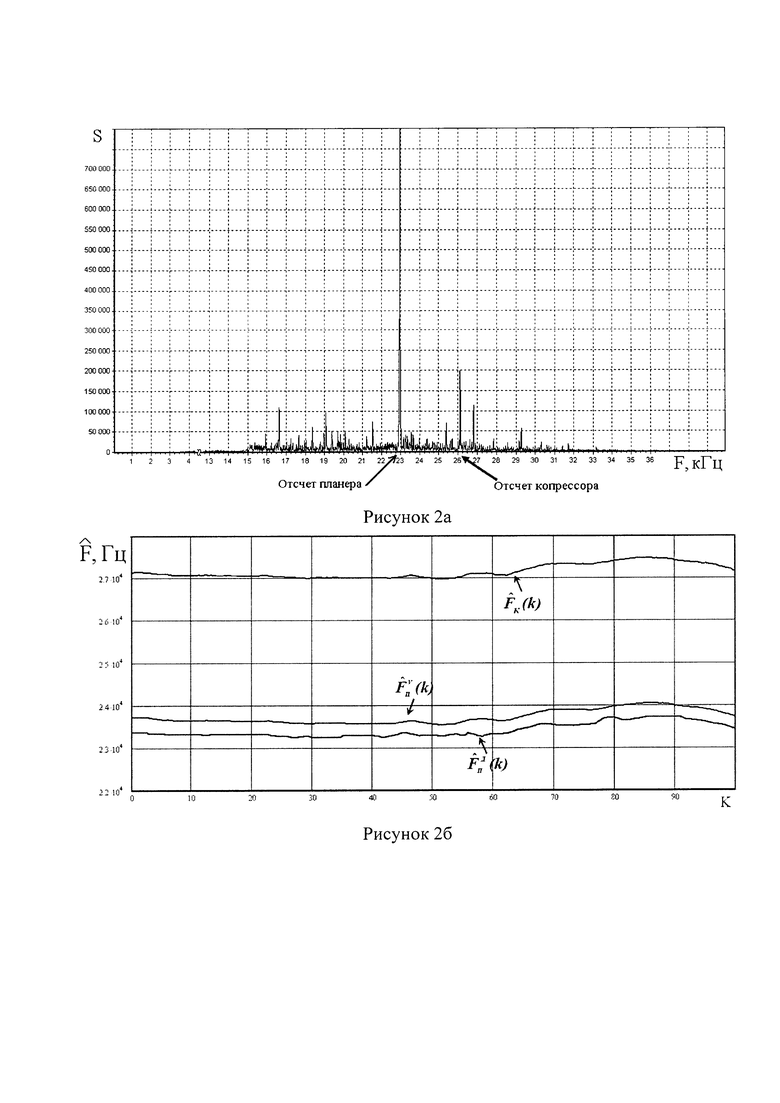
На вход блока 1 БПФ (рисунок 1) на промежуточной частоте с выхода приемника импульсно-доплеровской РЛС поступает сигнал S(t), отраженный от самолета с ТРД, который подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в амплитудно-частотный спектр S(f) (рисунок 2а), составляющие которого обусловлены отражениями сигнала от планера самолета и вращающихся частей КНД его силовой установки. В формирователе 2 (рисунок 1) доплеровских частот, во-первых, определяется отсчет доплеровской частоты (рисунок 2а), соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который обусловлен его отражениям от планера самолета, и, во-вторых, определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера самолета. В результате на одном выходе формирователя 2 доплеровских отсчетов (рисунок 1) формируются отсчеты доплеровской частоты  обусловленной отражением сигнала от планера самолета, которые поступают на вход первого калмановского фильтра ФСп 3 сопровождения самолета, а на другом выходе формирователя 2 доплеровских отсчетов формируются отсчеты доплеровской частоты Fк, обусловленной отражением сигнала от лопаток рабочего колеса первой ступени КНД, который поступает на вход второго калмановского фильтра ФСк 4 сопровождения первой компрессорной составляющей спектра сигнала. В первом калмановском фильтре ФСп 3 в дискретном времени осуществляется оценка доплеровской частоты
обусловленной отражением сигнала от планера самолета, которые поступают на вход первого калмановского фильтра ФСп 3 сопровождения самолета, а на другом выходе формирователя 2 доплеровских отсчетов формируются отсчеты доплеровской частоты Fк, обусловленной отражением сигнала от лопаток рабочего колеса первой ступени КНД, который поступает на вход второго калмановского фильтра ФСк 4 сопровождения первой компрессорной составляющей спектра сигнала. В первом калмановском фильтре ФСп 3 в дискретном времени осуществляется оценка доплеровской частоты  (рисунок 2б), обусловленной отражениями сигнала от планера самолета (где
(рисунок 2б), обусловленной отражениями сигнала от планера самолета (где  - номер текущего такта работы калмановских фильтров; К - промежуточное количество тактов работы калмановских фильтров, по достижении которого определяется вероятность распознавания типа самолета). Во втором калмановском фильтре ФСк 4 в дискретном времени осуществляется оценка доплеровской частоты
- номер текущего такта работы калмановских фильтров; К - промежуточное количество тактов работы калмановских фильтров, по достижении которого определяется вероятность распознавания типа самолета). Во втором калмановском фильтре ФСк 4 в дискретном времени осуществляется оценка доплеровской частоты  (рисунок 2б), обусловленной отражением сигнала от лопаток рабочего колеса первой ступени КНД силовой установки самолета.
(рисунок 2б), обусловленной отражением сигнала от лопаток рабочего колеса первой ступени КНД силовой установки самолета.
Одновременно в третьем калмановском фильтре ФСд 5 в дискретном времени осуществляется оценка дальности  до самолета на основе ее измерения в дальномере импульсно-доплеровской РЛС, по значениям которой в первом вычислителе 6 вычисляется производная оценки дальности
до самолета на основе ее измерения в дальномере импульсно-доплеровской РЛС, по значениям которой в первом вычислителе 6 вычисляется производная оценки дальности  а по ней - оценка доплеровской частоты
а по ней - оценка доплеровской частоты обусловленная отражениями сигнала от планера самолета (рисунок 2б), которая поступает на объединенные первые входы второго вычислителя 7 и коммутатора 9.
обусловленная отражениями сигнала от планера самолета (рисунок 2б), которая поступает на объединенные первые входы второго вычислителя 7 и коммутатора 9.
Кроме того, одновременно с выхода первого калмановского фильтра ФСп 3 оценка доплеровской частоты  поступает на объединенные вторые входы второго вычислителя 7 и коммутатора 9.
поступает на объединенные вторые входы второго вычислителя 7 и коммутатора 9.
Во втором вычислителе 7 вычисляется модуль разности оценок  который поступает на первый вход анализатора 8, на второй вход которого поступает значение порога εпор, близкое к нулю. В анализаторе 8 осуществляется сравнение модуля разности оценок
который поступает на первый вход анализатора 8, на второй вход которого поступает значение порога εпор, близкое к нулю. В анализаторе 8 осуществляется сравнение модуля разности оценок  доплеровских частот с величиной εnop.
доплеровских частот с величиной εnop.
При его не превышении  принимается решение об отсутствии воздействия уводящей по скорости помехи и на выходе анализатора 8 формируется разрешающий сигнал для прохождения через коммутатор 9 оценки доплеровской частоты
принимается решение об отсутствии воздействия уводящей по скорости помехи и на выходе анализатора 8 формируется разрешающий сигнал для прохождения через коммутатор 9 оценки доплеровской частоты  на первый вход блока 10 вычитания, на второй вход которого поступает оценка доплеровской частоты
на первый вход блока 10 вычитания, на второй вход которого поступает оценка доплеровской частоты  с выхода второго калмановского фильтра ФСк 4. На выходе блока 10 вычитания формируется разность оценок
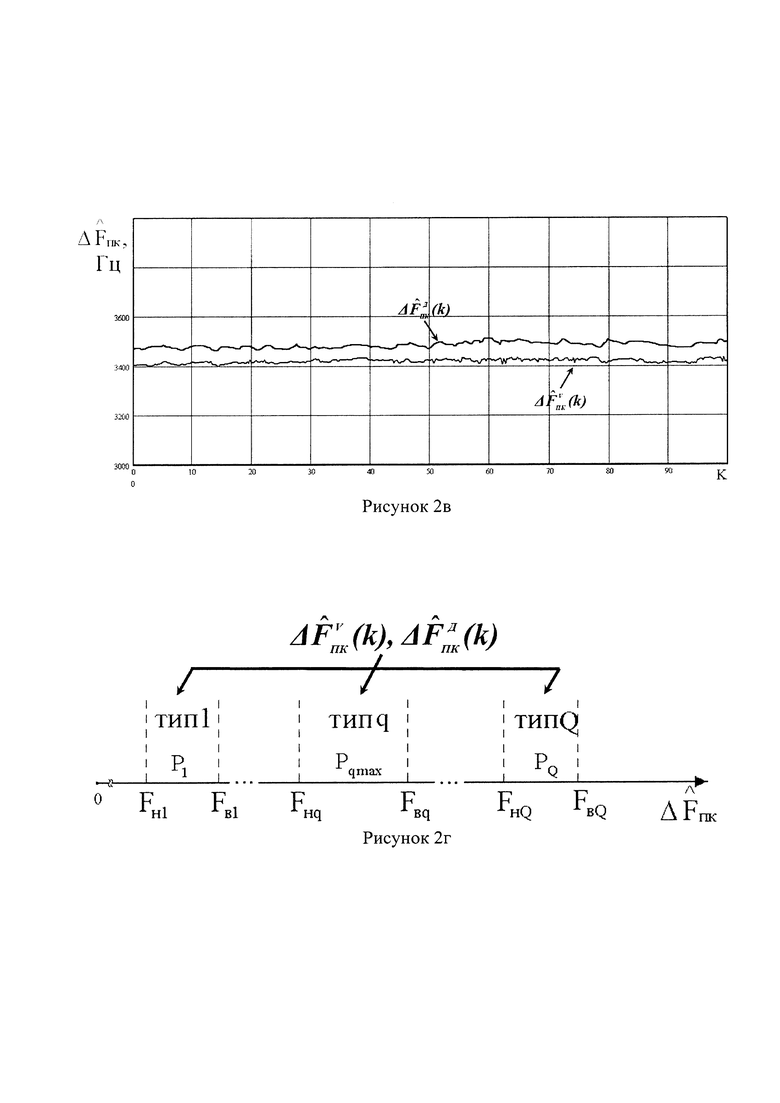
с выхода второго калмановского фильтра ФСк 4. На выходе блока 10 вычитания формируется разность оценок  (рисунок 2в).
(рисунок 2в).
В случае  принимается решение о воздействии уводящей по скорости помехи и на выходе анализатора 8 формируется разрешающий сигнал для прохождения через коммутатор 9 оценки доплеровской частоты
принимается решение о воздействии уводящей по скорости помехи и на выходе анализатора 8 формируется разрешающий сигнал для прохождения через коммутатор 9 оценки доплеровской частоты  на первый вход блока 10 вычитания, на второй вход которого также поступает оценка доплеровской частоты
на первый вход блока 10 вычитания, на второй вход которого также поступает оценка доплеровской частоты  с выхода второго калмановского фильтра ФСк 4. В этом случае на выходе блока 10 вычитания формируется разность оценок
с выхода второго калмановского фильтра ФСк 4. В этом случае на выходе блока 10 вычитания формируется разность оценок  (рисунок 2в).
(рисунок 2в).
Весь диапазон возможных значений оценок разностей  и
и  в формирователе 11 поддиапазонов разностей (рисунок 1) априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона определяются выражениями (1) и (2) (рисунок 2г).
в формирователе 11 поддиапазонов разностей (рисунок 1) априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона определяются выражениями (1) и (2) (рисунок 2г).
При принятии решения в анализаторе 8 об отсутствии воздействия уводящей по скорости помехи за К промежуточных тактов работы калмановских фильтров в третьем вычислителе 12 вычисляется вероятность Pq попадания величины  в каждый из априорно сформированный q-й поддиапазон. Эти значения вероятностей Pq поступают на вход четвертого вычислителя 13, где определяется номер того q-го поддиапазона, для которого величина вероятности Рq максимальна. Максимальное значение величины Pq max в решающем блоке 14 сравнивается с пороговым значением вероятности распознавания типа самолета Рпор. При Pq max≥Рпор принимается решение о распознавании q-го типа самолета с ТРД с вероятностью Pq max, не ниже заданной.
в каждый из априорно сформированный q-й поддиапазон. Эти значения вероятностей Pq поступают на вход четвертого вычислителя 13, где определяется номер того q-го поддиапазона, для которого величина вероятности Рq максимальна. Максимальное значение величины Pq max в решающем блоке 14 сравнивается с пороговым значением вероятности распознавания типа самолета Рпор. При Pq max≥Рпор принимается решение о распознавании q-го типа самолета с ТРД с вероятностью Pq max, не ниже заданной.
При принятии решения в анализаторе 8 (рисунок 1) о воздействии уводящей по скорости помехи за К промежуточных тактов работы калмановских фильтров в третьем вычислителе 12 вычисляется вероятность Pq попадания величины  (рисунок 2г) в каждый из априорно сформированный q-й поддиапазон. Затем, в четвертом вычислителе 13 определяется номер того q-го поддиапазона, для которого величина вероятности Pq максимальна и она сравнивается в решающем блоке 14 с пороговым значением вероятности распознавания типа самолета Рпор. При Pq max≥Рпор принимается решение о распознавании q-го типа самолета с вероятностью Pqmax, не ниже заданной, при воздействии уводящей по скорости помехи.
(рисунок 2г) в каждый из априорно сформированный q-й поддиапазон. Затем, в четвертом вычислителе 13 определяется номер того q-го поддиапазона, для которого величина вероятности Pq максимальна и она сравнивается в решающем блоке 14 с пороговым значением вероятности распознавания типа самолета Рпор. При Pq max≥Рпор принимается решение о распознавании q-го типа самолета с вероятностью Pqmax, не ниже заданной, при воздействии уводящей по скорости помехи.
Для оценки работоспособности предлагаемого способа были проведены экспериментальные исследования по регистрации на промежуточной частоте с выхода линейной части приемника импульсно-доплеровской РЛС, работающей в сантиметровом диапазоне волн, РЛ сигналов, отраженных от различных типов отечественных самолетов с ТРД, при воздействии уводящей по линейному закону доплеровской частоте (скорости) помехи с параметром 300 Гц/с, и ее отсутствии. Затем, зарегистрированные реальные РЛ сигналы обрабатывались в соответствии с предлагаемым способом распознавания типа самолета с ТРД. При узкополосном спектральном анализе зарегистрированных реальных РЛ сигналов применялся алгоритм БПФ с эквивалентной полосой пропускания его одного бина, равной 10 Гц. В результате имитационного моделирования предлагаемого способа распознавания типа самолета с ТРД по реальным РЛ сигналам получены следующие вероятностные характеристики при отношениях сигнал/шум 14-24 дБ за 35 тактов работы калмановских фильтров (времени сопровождения 3,5 с) и Рпор=0,7.
При отсутствии воздействия уводящей по скорости (доплеровской частоте) помехи вероятность правильного (ложного) распознавания типа самолета составила 0,78-0,84 (10-3-10-4).
При воздействии уводящей по скорости (доплеровской частоте) помехи вероятность правильного (ложного) распознавания типа самолета составила 0,72-0,81 (10-3-10-4).
Таким образом, применение предлагаемого изобретения позволит распознать в импульсно-доплеровской РЛС с вероятностью, не ниже заданной, тип самолета с ТРД при воздействии уводящей по скорости помехи или ее отсутствии.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Казаринов Ю.М., Соколов А.И., Юрченко Ю.С. Проектирование устройств фильтрации радиосигналов. - Л.: изд. Ленинградского университета, 1985, с. 150-151 (аналог).
2. Пат. 2419815 Российская Федерация МПК, G01S 13/52. Способ сопровождения воздушной цели из класса «самолет с турбореактивным двигателем» / А.В. Богданов, О.В. Васильев, И.Н. Исаков И.Н., А.Г. Ситников, А.А. Филонова. - №2009140853, заявл. 03.11.2009, опубл. 27.05.2011, Бюл. №15 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ сопровождения воздушной цели при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM | 2020 |
|
RU2727963C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЁТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" ПРИ ВОЗДЕЙСТВИИ УВОДЯЩЕЙ ПО СКОРОСТИ ПОМЕХИ | 2015 |
|
RU2579353C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при воздействии имитирующих помех | 2020 |
|
RU2735314C1 |
| Способ сопровождения в радиолокационной станции групповой воздушной цели из класса "самолёты с турбореактивными двигателями" при воздействии уводящих по скорости помех | 2016 |
|
RU2617110C1 |
| Способ распознавания типового состава групповой воздушной цели из класса "самолеты с турбореактивными двигателями" на основе калмановской фильтрации и нейронной сети | 2022 |
|
RU2786518C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" | 2009 |
|
RU2419815C1 |
| Способ всеракурсного распознавания в радиолокационной станции типового состава групповой воздушной цели при различных условиях полета и воздействии уводящих по скорости помех на основе калмановской фильтрации и нейронной сети | 2023 |
|
RU2816189C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТЫ С ТУРБОРЕАКТИВНЫМИ ДВИГАТЕЛЯМИ" | 2011 |
|
RU2456633C1 |
| Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2018 |
|
RU2665031C1 |
| Способ многопризнакого распознавания в многофункциональной радиолокационной станции класса летательного аппарата по принципу "самолет с турбореактивным двигателем - самолет с турбовинтовым двигателем - вертолет - ракета - беспилотный летательный аппарат" на основе совместного применения калмановской фильтрации и нейронной сети | 2024 |
|
RU2832712C1 |
Изобретение относится к области вторичной обработки радиолокационных сигналов. Достигаемый технический результат - обеспечение возможности распознавания в импульсно-доплеровской РЛС с вероятностью, не ниже заданной, тип самолета с ТРД при воздействии уводящей по скорости помехи. Способ заключается в том, что сигнал, отраженный от самолета с ТРД, с выхода приемника импульсно-доплеровской РЛС на промежуточной частоте подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье (БПФ) и преобразуется в амплитудно-частотный спектр отражений сигнала от планера самолета с ТРД и вращающихся лопаток рабочего колеса компрессора низкого давления (КНД) его силовой установки. Определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала отражений от планера самолета. В первом калмановском фильтре осуществляется оценка доплеровской частоты  отражений сигнала от планера самолета, во втором калмановском фильтре - оценка доплеровской частоты
отражений сигнала от планера самолета, во втором калмановском фильтре - оценка доплеровской частоты  отражений сигнала от лопаток рабочего колеса ервой ступени КНД силовой установки самолета, в третьем калмановском фильтре - оценка дальности
отражений сигнала от лопаток рабочего колеса ервой ступени КНД силовой установки самолета, в третьем калмановском фильтре - оценка дальности  до самолета, вычисляется модуль разности оценок и на основе производной оценки дальности, его сравнение с порогом, близким к нулю. При непревышении порога - вывод об отсутствии воздействия уводящей по скорости помехи, в противном случае - решение о воздействии уводящей по скорости помехи. Диапазон значений оценок разностей
до самолета, вычисляется модуль разности оценок и на основе производной оценки дальности, его сравнение с порогом, близким к нулю. При непревышении порога - вывод об отсутствии воздействия уводящей по скорости помехи, в противном случае - решение о воздействии уводящей по скорости помехи. Диапазон значений оценок разностей  разбивается на Q неперекрывающихся друг с другом поддиапазонов. При решении об отсутствии воздействия уводящей по скорости помехи вычисляется вероятность Pq попадания величины
разбивается на Q неперекрывающихся друг с другом поддиапазонов. При решении об отсутствии воздействия уводящей по скорости помехи вычисляется вероятность Pq попадания величины  в каждый q-й поддиапазон, а при решении о воздействии уводящей по скорости помехи вычисляется вероятность Pq попадания величины
в каждый q-й поддиапазон, а при решении о воздействии уводящей по скорости помехи вычисляется вероятность Pq попадания величины  в каждый q-й поддиапазон. Максимальное значение вероятности сравнивается с пороговым значением вероятности распознавания типа самолета. При превышении порога - решение о распознавании q-го типа самолета с ТРД с вероятностью Pq max. 5 ил.
в каждый q-й поддиапазон. Максимальное значение вероятности сравнивается с пороговым значением вероятности распознавания типа самолета. При превышении порога - решение о распознавании q-го типа самолета с ТРД с вероятностью Pq max. 5 ил.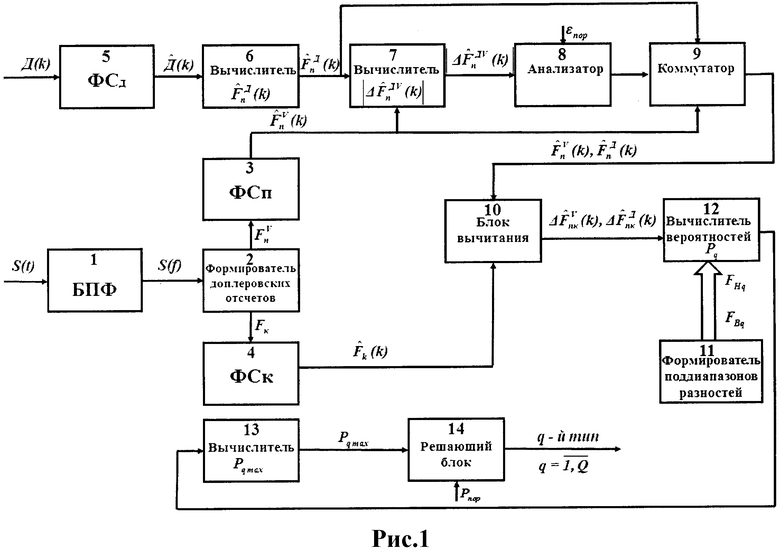
Способ распознавания типа самолета с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при воздействии уводящей по скорости помехи, заключающийся в том, что сигнал, отраженный от самолета с турбореактивным двигателем, с выхода приемника импульсно-доплеровской радиолокационной станции на промежуточной частоте подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье и преобразуется в амплитудно-частотный спектр, спектральные составляющие которого обусловлены отражениями сигнала от планера самолета с турбореактивным двигателем и вращающихся лопаток рабочего колеса компрессора низкого давления его силовой установки, определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который обусловлен его отражением от планера самолета, в первом калмановском фильтре в дискретном времени осуществляется оценка доплеровской частоты  обусловленной отражениями сигнала от планера самолета, где
обусловленной отражениями сигнала от планера самолета, где  - номер текущего такта работы калмановских фильтров; К - промежуточное количество тактов работы калмановских фильтров, по достижении которого определяется вероятность распознавания типа самолета, определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера самолета, во втором калмановском фильтре в дискретном времени осуществляется оценка доплеровской частоты
- номер текущего такта работы калмановских фильтров; К - промежуточное количество тактов работы калмановских фильтров, по достижении которого определяется вероятность распознавания типа самолета, определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера самолета, во втором калмановском фильтре в дискретном времени осуществляется оценка доплеровской частоты  обусловленной отражением сигнала от лопаток рабочего колеса первой ступени компрессора низкого давления силовой установки самолета, отличающийся тем, что в третьем калмановском фильтре в дискретном времени осуществляется оценка дальности
обусловленной отражением сигнала от лопаток рабочего колеса первой ступени компрессора низкого давления силовой установки самолета, отличающийся тем, что в третьем калмановском фильтре в дискретном времени осуществляется оценка дальности  до самолета на основе ее измерения в дальномере импульсно-доплеровской радиолокационной станции, вычисляется производная оценки дальности
до самолета на основе ее измерения в дальномере импульсно-доплеровской радиолокационной станции, вычисляется производная оценки дальности  вычисляется модуль разности оценок
вычисляется модуль разности оценок  - оценка доплеровской частоты, обусловленной отражениями сигнала от планера самолета и полученная на основе производной оценки дальности; λ - рабочая длина волны импульсно-доплеровской радиолокационной станции, осуществляется сравнение модуля разности оценок
- оценка доплеровской частоты, обусловленной отражениями сигнала от планера самолета и полученная на основе производной оценки дальности; λ - рабочая длина волны импульсно-доплеровской радиолокационной станции, осуществляется сравнение модуля разности оценок  доплеровских частот с порогом, близким к нулю, при его непревышении принимается решение об отсутствии воздействия уводящей по скорости помехи и формируется разность оценок
доплеровских частот с порогом, близким к нулю, при его непревышении принимается решение об отсутствии воздействия уводящей по скорости помехи и формируется разность оценок  в противном случае принимается решение о воздействии уводящей по скорости помехи и формируется разность оценок
в противном случае принимается решение о воздействии уводящей по скорости помехи и формируется разность оценок  весь диапазон возможных значений оценок разностей
весь диапазон возможных значений оценок разностей  априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона, где
априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона, где  Q - максимальное количество распознаваемых типов самолетов с турбореактивными двигателями, соответствующего q-му типу самолета, определяются выражениями
Q - максимальное количество распознаваемых типов самолетов с турбореактивными двигателями, соответствующего q-му типу самолета, определяются выражениями


где FPq - максимальная частота вращения ротора компрессора низкого давления силовой установки q-го типа самолета;
n1 и n2 - соответственно минимальное и максимальное значения величины относительных оборотов вращения ротора силовой установки, одинаковые для всех типов самолетов;
Nлq - количество лопаток рабочего колеса первой ступени компрессора низкого давления q-го типа самолета, при принятии решения об отсутствии воздействия уводящей по скорости помехи за К промежуточных тактов работы калмановских фильтров вычисляется вероятность Pq попадания величины  в каждый априорно сформированный q-й поддиапазон, определяется номер того q-го поддиапазона, для которого величина вероятности Pq максимальна, максимальное значение величины Pq max сравнивается с пороговым значением вероятности распознавания типа самолета Рпор, при Pq max≥Рпор принимается решение о распознавании q-го типа самолета с турбореактивным двигателем с вероятностью Pq max, не ниже заданной, при принятии решения о воздействии уводящей по скорости помехи за К промежуточных тактов работы калмановских фильтров вычисляется вероятность Pq попадания величины
в каждый априорно сформированный q-й поддиапазон, определяется номер того q-го поддиапазона, для которого величина вероятности Pq максимальна, максимальное значение величины Pq max сравнивается с пороговым значением вероятности распознавания типа самолета Рпор, при Pq max≥Рпор принимается решение о распознавании q-го типа самолета с турбореактивным двигателем с вероятностью Pq max, не ниже заданной, при принятии решения о воздействии уводящей по скорости помехи за К промежуточных тактов работы калмановских фильтров вычисляется вероятность Pq попадания величины  в каждый априорно сформированный q-й поддиапазон, определяется номер того q-го поддиапазона, для которого величина вероятности Pq максимальна, максимальное значение величины Pq max сравнивается с пороговым значением вероятности распознавания типа самолета Рпор, при Pq max≥Рпор принимается решение о распознавании q-го типа самолета с турбореактивным двигателем с вероятностью Pq max, не ниже заданной.
в каждый априорно сформированный q-й поддиапазон, определяется номер того q-го поддиапазона, для которого величина вероятности Pq максимальна, максимальное значение величины Pq max сравнивается с пороговым значением вероятности распознавания типа самолета Рпор, при Pq max≥Рпор принимается решение о распознавании q-го типа самолета с турбореактивным двигателем с вероятностью Pq max, не ниже заданной.
| Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2018 |
|
RU2665031C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТЫ С ТУРБОРЕАКТИВНЫМИ ДВИГАТЕЛЯМИ" | 2011 |
|
RU2456633C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЁТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" ПРИ ВОЗДЕЙСТВИИ УВОДЯЩЕЙ ПО СКОРОСТИ ПОМЕХИ | 2015 |
|
RU2579353C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" | 2009 |
|
RU2419815C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ КЛАССА "ВЕРТОЛЕТ" | 2010 |
|
RU2468385C2 |
| СПОСОБ СЕЛЕКЦИИ ЦЕЛИ НА ФОНЕ УВОДЯЩЕЙ ПО СКОРОСТИ ПОМЕХИ | 2009 |
|
RU2411537C1 |
| Способ металлургической переработки фосфористого ферромарганца | 1961 |
|
SU144505A1 |
| Крепление разрезных подкрановых балок | 1952 |
|
SU102640A1 |
| US 4348674 A, 07.09.1982 | |||
| DE 19705730 A1, 20.08.1998 | |||
| US 6765525 B2, 20.07.2004. | |||

