Изобретение относится к области вторичной цифровой обработки сигналов в радиолокационной станции (РЛС) и может быть использовано для сопровождения и распознавания типа воздушной цели (ВЦ) из класса «самолет с турбореактивным двигателем (ТРД)» при воздействии уводящей по скорости помехи.
Известен способ сопровождения воздушной цели на основе процедуры оптимальной многомерной линейной дискретной калмановской фильтрации в соответствии с уравнениями: [1]






где k=0, 1, …, К, …, - номер такта работы фильтра;
К - промежуточное количество тактов работы фильтра;
P-(k+1) и Р(k+1) - ковариационные матрицы ошибок экстраполяции и фильтрации соответственно;
Ф(k) - переходная матрица состояния;
Q(k+1) и R(k+1) - ковариационные матрицы шумов возбуждения и наблюдения соответственно;
S(k+1) - матрица весовых коэффициентов;
I - единичная матрица;


Н(k+1) - матрица наблюдения;
Y(k) - вектор наблюдения отсчетов доплеровской частоты;
Z(k+1) - матрица невязок измерения;
ψ(k+1) - матрица априорных ошибок фильтрации;
-1 - операция вычисления обратной матрицы;
т - операция транспонирования матрицы,
Недостатком данного способа сопровождения воздушной цели является низкая достоверность выходной информации о доплеровской частоте, обусловленной скоростью полета воздушной цели относительно облучающей ее РЛС, при воздействии уводящей по скорости помехи.
Известен способ сопровождения в РЛС воздушной цели из класса «самолет с турбореактивным двигателем», заключающийся в том, что сигнал, отраженный от цели, подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье (БПФ) и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планера сопровождаемой ВЦ и вращающихся лопаток рабочего колеса компрессора низкого давления (КНД) ее силовой установки, определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который соответствует его отражениям от планера ВЦ и поступает на вход оптимального фильтра сопровождения ВЦ, функционирующего в соответствии с процедурой оптимальной многомерной линейной дискретной калмановской фильтрации (1)-(6), определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера ВЦ, который поступает на вход оптимального фильтра сопровождения первой компрессорной составляющей спектра сигнала, обусловленной его отражениями от лопаток рабочего колеса первой ступени КНД и функционирующего в соответствии с процедурой (1)-(6), определяется оценка разности 




где FPi - максимальная частота вращения ротора компрессора низкого давления силовой установки i-го типа воздушной цели;
n1 и n2 - соответственно минимальное и максимальное значения величины относительных оборотов вращения ротора силовой установки, одинаковые для всех типов воздушных целей;
Nлi - количество лопаток рабочего колеса первой ступени компрессора низкого давления, вычисляется за К промежуточных тактов работы обоих оптимальных фильтров вероятность Pq попадания величины
Недостатком данного способа сопровождения воздушной цели из класса «самолет с турбореактивным двигателем» является низкая достоверность выходной информации о типе и доплеровской частоте, обусловленной скоростью полета воздушной цели относительно облучающей ее РЛС, при воздействии уводящей по скорости помехи.
Цель изобретения - повышение достоверности выходной информации о типе и доплеровской частоте сопровождаемой в РЛС воздушной цели при воздействии уводящей по скорости помехи.
Указанная цель достигается тем, что в способе сопровождения в РЛС воздушной цели из класса «самолет с турбореактивным двигателем», заключающимся в том, что сигнал, отраженный от цели, подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планера сопровождаемой ВЦ и вращающихся лопаток рабочего колеса КНД ее силовой установки, определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который соответствует его отражениям от планера ВЦ и поступает на вход оптимального фильтра сопровождения ВЦ, функционирующего в соответствии с процедурой оптимальной многомерной линейной дискретной калмановской фильтрации (1)-(6), определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера ВЦ, который поступает на вход оптимального фильтра сопровождения первой компрессорной составляющей спектра сигнала, обусловленной его отражениями от лопаток рабочего колеса первой ступени КНД и функционирующего в соответствии с процедурой (1)-(6), определяется оценка разности










где Ф*(k) - переходная матрица состояния, численные значения элементов которой определяются на основе корреляционного анализа совокупности текущих значений оценок
Новыми признаками, обладающими существенными отличиями, являются:
1. Идентификация отсутствия или воздействия уводящей по скорости помехи на основе анализа производной оценки модуля разности величины 

2. Обеспечение достоверной выходной информации о доплеровской частоте в соответствии с процедурой (1)-(6) и типе сопровождаемой цели при отсутствии уводящей по скорости помехи (при выполнении условия 
Данные признаки обладают существенными отличиями, т.к. в известных способах не обнаружены.
Применение новых признаков позволит идентифицировать воздействие или отсутствие уводящей по скорости помехи при сопровождении цели в РЛС и, в зависимости от результата идентификации, сформировать достоверную выходную информацию о типе сопровождаемой цели и доплеровской частоте, обусловленной полетом цели относительно облучающей ее РЛС.
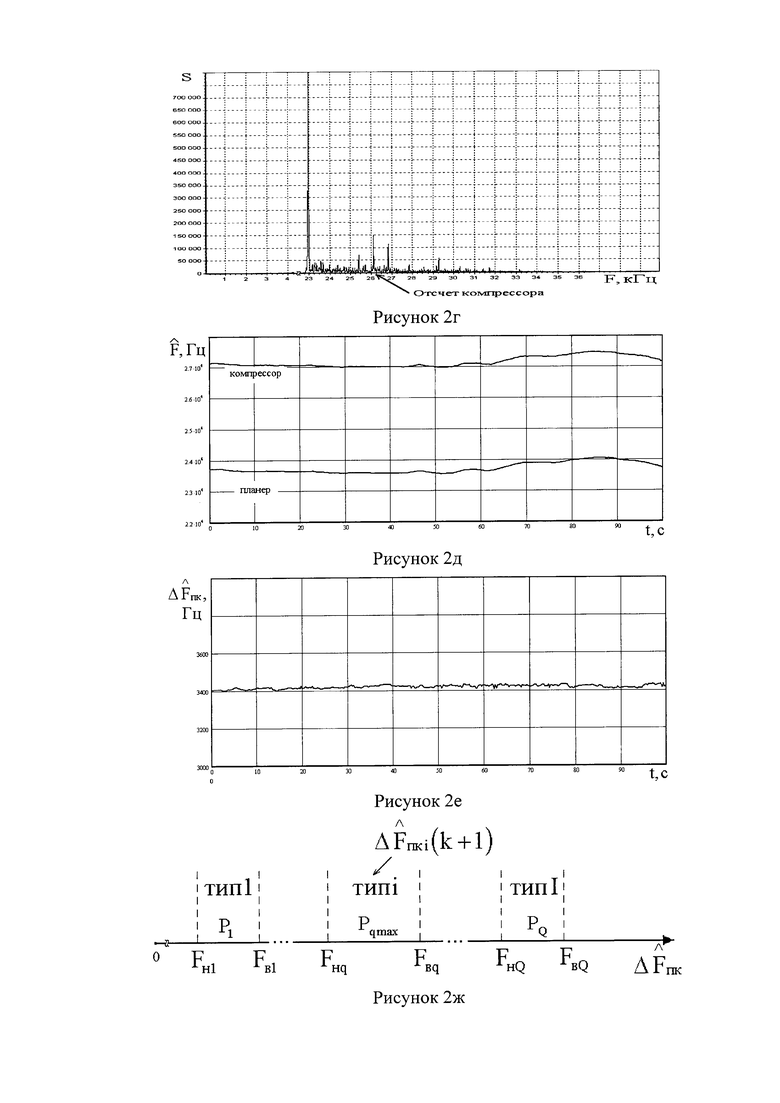
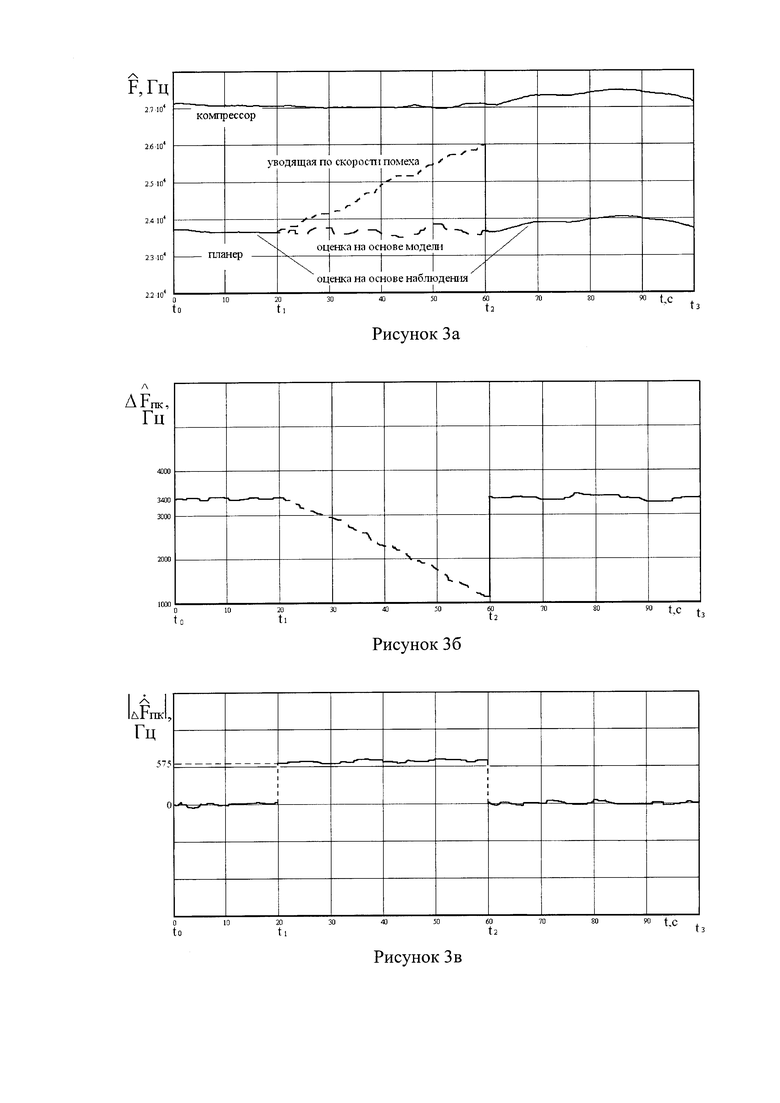
На рис. 1 приведена блок-схема, поясняющая предлагаемый способ сопровождения в РЛС воздушной цели из класса «самолет с турбореактивным двигателем» при воздействии уводящей по скорости помехи, на рис. 2 (а, б, в, г, д, е, ж) - эпюры, поясняющие формирование выходной информации без воздействия уводящей по скорости помехи, на рис. 3 (а, б, в) - эпюры, поясняющие формирование выходной информации при отсутствии (на временных участках [t0; t1] и [t2; t3]) и воздействии (на временном участке [t1; t2]) уводящей по скорости помехи.
Способ сопровождения в РЛС воздушной цели из класса «самолет с турбореактивным двигателем» при воздействии уводящей по скорости помехи реализуется следующим образом.
На вход блока 1 БПФ (рис. 1) на промежуточной частоте с выхода приемника РЛС поступает сигнал S(t) (рис. 2а), отраженный от ВЦ, который подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в амплитудно-частотный спектр S(f) (рис. 2б), составляющие которого обусловлены отражениями сигнала от планера сопровождаемой ВЦ и вращающихся частей КНД ее силовой установки. В формирователе 2 (рис. 1) доплеровских частот, во-первых, определяется отсчет доплеровской частоты (рис. 2в), соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который соответствует его отражениям от планера ВЦ, и, во-вторых, определяется отсчет доплеровской частоты (рис. 2г), соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера ВЦ. В результате на одном выходе формирователя 2 доплеровских отсчетов (рис. 1) формируется вектор наблюдения Yп(k) отсчетов доплеровской частоты, обусловленной отражениями сигнала от планера ВЦ, который поступает на вход оптимального фильтра 3 сопровождения ВЦ, работающего в соответствии с процедурой многомерной линейной дискретной калмановской фильтрации (1)-(6), а на другом выходе формирователя 2 доплеровских отсчетов формируется вектор наблюдения Yк(k) отсчетов доплеровской частоты, обусловленной отражениями сигнала от первой ступени КНД, который поступает на вход оптимального фильтра 4 сопровождения первой компрессорной составляющей спектра сигнала, работающего аналогично, как и оптимальный фильтр 3, в соответствии с процедурой (1)-(6). На каждом k-м такте работы оптимальных фильтров 3 и 4 сопровождения в блоке 5 вычитания определяется оценка разности 



При выполнении условия 





При выполнении в пороговом устройстве 7 условия 


где

Δt - интервал дискретизации;
k=1, 2, …, n;
mFп - тренд (изменяющееся в дискретном времени математическое ожидание) траектории доплеровской частоты.
Вычисленная в соответствии с выражением 10 АКФ аппроксимируется спадающей по экспоненциальному закону косинусоидальной зависимостью вида [3]:

где σv, τv и fv - соответственно среднеквадратическое отклонение (СКО), время корреляции и собственная частота, которые являются параметрами АКФ.
Численные значения параметров АКФ (σv, τv, fv) поступают на вход вычислителя 17 оценки 
При этом, в вычислителе 17, во-первых, на первом шаге рекуррентной процедуры вычисления оценок принимается конечная оценка 
Во-вторых, матрица Ф*(k+1) размерностью 3×3 будет иметь следующие, отличные от нуля, элементы: φ11=1; φ12=Δt; φ21=-βΔt; φ22=1-αΔt; φ33=1+Δt, которые соответствуют динамической модели полета воздушной цели, описываемой следующей системой дифференциальных уравнений в непрерывном времени [3]:
где β=(2πfv)2 - квадрат частоты fv собственных колебаний АКФ, которые обусловлены скоростными флюктуациями полета цели;

n(t) - формирующий белый гауссовский шум с нулевыми средними значениями и единичными интенсивностями;
Vo - постоянная составляющая скорости полета цели;

Согласно модели (13), матрица оценок 
Матрица наблюдения Н(k+1) размерностью 1×3 будет иметь следующие, отличные от нуля, элементы: h11=h13.
В результате при воздействии уводящей по скорости помехи (рис. 3а, временной участок [t1; t2]) на выходе вычислителя 17 будут формироваться оценки 

Отличие оценки 



Для оценки работоспособности предлагаемого способа было проведено его имитационное моделирование. При этом были использованы радиолокационные сигналы, отраженные от 5 типов реальных отечественных самолетов с турбореактивными двигателями, и предварительно при проведении летно-экспериментальных исследований были зарегистрированные на промежуточной частоте с выхода линейной части приемника РЛС с фазированной антенной решеткой, построенной по импульсно-доплеровскому принципу обработки сигналов в сантиметровом диапазоне волн.
При узкополосном спектральном анализе зарегистрированных реальных радиолокационных сигналов в алгоритме БПФ эквивалентная полоса пропускания одного бина принималась равной 10 Гц.
Численные значения параметров динамических моделей, входящих в оптимальные фильтры 3 и 4, а также в вычислителе 17, принимались из примера, приведенного в [3].
В интервале времени (рис. 3а) [t1; t2] имитировалась уводящая по доплеровской частоте помеха со скоростью 575 Гц/с.
Пороговые значения величин в пороговом устройстве 7 и решающем блоке 16 соответственно составляли: Рпор=0,75; ε=0,01.
В результате имитационного моделирования по реальным сигналам получены следующие интегральные характеристики при отношениях сигнал/шум 14-24 дБ:
среднеквадратическая ошибка точность оценки доплеровской частоты:
без воздействия уводящей по доплеровской частоте помехи - 0,6-1,8 Гц;
при воздействии уводящей по доплеровской частоте помехи - 1,2-3,4 Гц;
вероятность правильного (ложного) распознавания типа цели - 0,79-0,94 (10-3-10-4).
Таким образом, применение предлагаемого изобретения позволит идентифицировать воздействие или отсутствие уводящей по скорости помехи при сопровождении цели в РЛС и, в зависимости от результата идентификации, сформировать достоверную выходную информацию о типе сопровождаемой цели и доплеровской частоте, обусловленной ее полетом относительно облучающей РЛС.
Источники информации
1. Казаринов Ю.М., Соколов А.И., Юрченко Ю.С. Проектирование устройств фильтрации радиосигналов. - Л.: изд. Ленинградского университета, 1985, с. 150, 151 (аналог).
2. Способ сопровождения воздушной цели из класса «самолет с турбореактивным двигателем». Патент на изобретение № 2419815, 2009 (прототип).
3. Богданов А.В., Васильев О.В., Голубенко В.А., Маняшин С.М., Филонов А.А. Методика построения динамических моделей радиальных скоростей и ускорений пары воздушных целей, летящих в сомкнутом боевом порядке // Теория и системы управления, 2007 - № 4 (с. 139, 142, 145, 146 - формулы (2.1), (2.2), (3.2)-(3.5), (5.3), (5.4) и (5.11), пример пп. 2, 3, 4, 7).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при воздействии имитирующих помех | 2020 |
|
RU2735314C1 |
| Способ сопровождения воздушной цели при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM | 2020 |
|
RU2727963C1 |
| Способ сопровождения в радиолокационной станции групповой воздушной цели из класса "самолёты с турбореактивными двигателями" при воздействии уводящих по скорости помех | 2016 |
|
RU2617110C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при воздействии уводящей по скорости помехи | 2019 |
|
RU2732281C1 |
| Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2018 |
|
RU2665031C1 |
| Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2020 |
|
RU2764781C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" | 2009 |
|
RU2419815C1 |
| Способ комплексирования информации радиолокационной станции и радиолокационных головок самонаведения ракет, пущенных носителем по воздушной цели при воздействии уводящих по дальности и скорости помех | 2021 |
|
RU2765145C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТЫ С ТУРБОРЕАКТИВНЫМИ ДВИГАТЕЛЯМИ" | 2011 |
|
RU2456633C1 |
| Способ сопровождения в радиолокационной станции воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2019 |
|
RU2713635C1 |


Изобретение относится к области вторичной цифровой обработки сигналов в радиолокационной станции (РЛС) и может быть использовано для сопровождения и распознавания типа воздушной цели из класса «самолет с турбореактивным двигателем» при воздействии уводящей по скорости помехи. Достигаемый технический результат - повышение достоверности выходной информации. Способ заключается в: параллельном сопровождении на основе калмановской фильтрации отсчетов доплеровских частот, обусловленных отражениями сигнала от планера цели и вращающихся структур компрессора низкого давления ее силовой установки; вычислении разности между полученными значениями доплеровских частот; вычислении модуля производной разности и сравнении ее с порогом, близким к нулю; разбиении всего диапазона разностей на неперекрывающиеся поддиапазоны, каждый из которых соответствует только одному типу цели; вычислении за несколько промежуточных тактов работы обоих калмановских фильтров вероятности попадания оценки разности частот в каждый из априорно сформированный поддиапазон; определении номера поддиапазона, для которого величина этой вероятности максимальна и ее сравнении с заданным порогом вероятности распознавания; принятии решения о распознавании типа цели с вероятностью, не ниже заданной; в случае непревышения модуля производной разности планерной и компрессорной составляющих доплеровских частот порога, близкого к нулю (при отсутствии воздействия уводящей по скорости помехи), формировании выходной информации в виде оценки типа цели и доплеровской частоты на основе динамической модели в калмановских фильтрах и входного сигнала, в противном случае (при превышении модуля разности порога - воздействии уводящей по скорости помехи) - в виде оценки типа цели, распознанного до воздействия помехи, и доплеровской частоты только на основе динамической модели планерной составляющей спектра сигнала. 3 ил.
Способ сопровождения в радиолокационной станции воздушной цели из класса «самолет с турбореактивным двигателем» при воздействии уводящей по скорости помехи, заключающийся в том, что сигнал, отраженный от цели, подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планера сопровождаемой воздушной цели и вращающихся лопаток рабочего колеса компрессора низкого давления ее силовой установки, определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который соответствует его отражениям от планера воздушной цели и поступает на вход оптимального фильтра сопровождения воздушной цели, функционирующего в соответствии с процедурой оптимальной многомерной линейной дискретной калмановской фильтрации:






где k=0, 1, …, К, …, - номер такта работы фильтра;
К - промежуточное количество тактов работы фильтра;
Р-(k+1) и Р(k+1) - ковариационные матрицы ошибок экстраполяции и фильтрации соответственно;
Ф(k) - переходная матрица состояния;
Q(k+1) и R(k+1) - ковариационные матрицы шумов возбуждения и наблюдения соответственно;
S(k+1) - матрица весовых коэффициентов;
I - единичная матрица;

Н(k) - матрица наблюдения;
Y(k) - вектор наблюдения отсчетов доплеровской частоты;
Z(k+1) - матрица невязок измерения;
ψ(k+1) - матрица априорных ошибок фильтрации;
-1 - операция вычисления обратной матрицы;
т - операция транспонирования матрицы,
определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера воздушной цели, который поступает на вход оптимального фильтра сопровождения первой компрессорной составляющей спектра сигнала, обусловленной его отражениями от лопаток рабочего колеса первой ступени компрессора низкого давления и функционирующего в соответствии с процедурой (1)-(6), определяется оценка разности


где FPi - максимальная частота вращения ротора компрессора низкого давления силовой установки i-го типа воздушной цели;
n1 и n2 - соответственно минимальное и максимальное значения величины относительных оборотов вращения ротора силовой установки, одинаковые для всех типов воздушных целей;
Nлi - количество лопаток рабочего колеса первой ступени компрессора низкого давления,
вычисляется за К промежуточных тактов работы обоих оптимальных фильтров вероятность Pq попадания величины
 компрессора низкого давления силовой установки воздушной цели, которая сравнивается с пороговым значением ε, близким к нулю, при
компрессора низкого давления силовой установки воздушной цели, которая сравнивается с пороговым значением ε, близким к нулю, при
где - переходная матрица состояния, численные значения элементов которой определяются на основе корреляционного анализа совокупности текущих значений оценок
- переходная матрица состояния, численные значения элементов которой определяются на основе корреляционного анализа совокупности текущих значений оценок
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" | 2009 |
|
RU2419815C1 |
| Способ металлургической переработки фосфористого ферромарганца | 1961 |
|
SU144505A1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО КЛАССИФИКАЦИИ ВИБРИРУЮЩИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ТРАЕКТОРНЫМИ НЕСТАБИЛЬНОСТЯМИ ПОЛЕТА В ПРИЗЕМНЫХ СЛОЯХ АТМОСФЕРЫ | 2009 |
|
RU2407031C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТЫ С ТУРБОРЕАКТИВНЫМИ ДВИГАТЕЛЯМИ" | 2011 |
|
RU2456633C1 |
| WO 2011056107 A1, 12.05.2011 | |||
| СЫРЬЕВАЯ СМЕСЬ ДЛЯ ИЗГОТОВЛЕНИЯ ТЕПЛОИЗОЛЯЦИОННЫХ ИЗДЕЛИЙ | 1997 |
|
RU2149857C1 |
| US 6603421 B1, 05.08.2003. | |||

