Изобретение относится к области вторичной цифровой обработки радиолокационных сигналов и может быть использовано для сопровождения и распознавания типа воздушной цели (ВЦ)-самолета с турбореактивным двигателем (ТРД) при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM (цифровая радиочастотная память).
Известен способ сопровождения ВЦ, основанный на процедуре оптимальной многомерной линейной дискретной калмановской фильтрации и описываемой выражениями [1]






где
k=0, 1, …, К - номер такта работы фильтра;
К - промежуточное количество тактов работы фильтра;
P-(k+1) и Р(k+1) - ковариационные матрицы ошибок экстраполяции и фильтрации соответственно;
Ф(k) - переходная матрица состояния;
Q(k+1) и R(k+1) - ковариационные матрицы шумов возбуждения и наблюдения соответственно;
S(k+1) - матрица весовых коэффициентов;
I - единичная матрица;
 - вектор текущих и экстраполированных оценок фазовых координат вектора состояния;
- вектор текущих и экстраполированных оценок фазовых координат вектора состояния;
Н(k) - матрица наблюдения;
Y(k) - вектор наблюдения;
Z(k+1) - матрица невязок измерения;
Ψ(k+l) - матрица априорных ошибок фильтрации;
"-1"- операция вычисления обратной матрицы;
"т" - операция транспонирования матрицы.
Недостатком данного способа сопровождения ВЦ является невозможность с помощью его распознать с вероятностью, не ниже заданной, тип сопровождаемой ВЦ-самолета с ТРД при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM.
Известен способ сопровождения воздушной цели-самолета с ТРД, заключающийся в том, что отраженный от воздушной цели-самолета с ТРД радиолокационный (РЛ) сигнал на промежуточной частоте с помощью процедуры быстрого преобразования Фурье (БПФ) преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планера сопровождаемой ВЦ и вращающихся лопаток рабочего колеса компрессора низкого давления (КНД) ее силовой установки, в области планерных составляющих доплеровских частот определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала и обусловленный отражениями РЛ сигнала от планера ВЦ-самолета с ТРД, который поступает на вход первого калмановского фильтра, работающего в соответствии с выражениями (1)-(6), определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся слева на единицы кГц по доплеровской частоте относительно отсчета доплеровской частоты, соответствующей отражениями РЛ сигнала от планера ВЦ-самолета с ТРД, который поступает на вход калмановского фильтра сопровождения первой компрессорной составляющей спектра сигнала, обусловленной его отражениями от лопаток рабочего колеса первой ступени КНД и функционирующего также в соответствии с выражениями (1)-(6), на каждом k-ом такте работы обоих калмановских фильтров сопровождения определяется оценка разности  между оцененными планерными значениями доплеровских частот
между оцененными планерными значениями доплеровских частот  и лопаток рабочего колеса первой ступени
и лопаток рабочего колеса первой ступени  КНД силовой установки ВЦ-самолета с ТРД, весь диапазон возможных значений оценок разностей между планерной и компрессорной составляющих спектра сигнала
КНД силовой установки ВЦ-самолета с ТРД, весь диапазон возможных значений оценок разностей между планерной и компрессорной составляющих спектра сигнала  априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона (где
априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона (где  ), соответствующего q-му типу цели, определяются выражениями
), соответствующего q-му типу цели, определяются выражениями


где
FP - максимальная частота вращения ротора КНД силовой установки q-го типа воздушной цели;
n1 и n2 - соответственно минимальное и максимальное значение величины относительных оборотов вращения ротора силовой установки, одинаковые для всех типов воздушных целей;
Nл - количество лопаток рабочего колеса первой ступени КНД силовой установки ВЦ-самолета с ТРД,
за К промежуточных тактов работы обоих калмановских фильтров вычисляется вероятность Pq попадания величины  в каждый из априорно сформированный q-й поддиапазон, определяется номер q -го поддиапазона, для которого величина вероятности Pq максимальна, максимальное значение величины Pq max сравнивается с пороговым значением вероятности распознавания типа цели Рпор, при Pq max≥Рпор принимается решение о распознавании q-го типа сопровождаемой ВЦ-самолета с ТРД с вероятностью Pq max, не ниже заданной, в противном случае принимается решение о невозможности распознать тип сопровождаемой ВЦ-самолета с ТРД с заданной вероятностью [2].
в каждый из априорно сформированный q-й поддиапазон, определяется номер q -го поддиапазона, для которого величина вероятности Pq максимальна, максимальное значение величины Pq max сравнивается с пороговым значением вероятности распознавания типа цели Рпор, при Pq max≥Рпор принимается решение о распознавании q-го типа сопровождаемой ВЦ-самолета с ТРД с вероятностью Pq max, не ниже заданной, в противном случае принимается решение о невозможности распознать тип сопровождаемой ВЦ-самолета с ТРД с заданной вероятностью [2].
Недостатком данного способа сопровождения ВЦ является отсутствие с его помощью распознать с вероятностью, не ниже заданной, тип сопровождаемой ВЦ-самолета с ТРД при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM.
Действительно, при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM в области планерных доплеровских частот будут присутствовать две спектральные составляющие, одна из которых обусловлена отражениями РЛ от планера ВЦ-самолета с ТРД, а другая - воздействием сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM. В этом случае возникает неоднозначность в определении величины  то есть либо принимать разность между первым отсчетом доплеровской частоты в области планерной составляющей спектра сигнала и компрессорной составляющей, либо принимать разность между вторым отсчетом доплеровской частоты в области планерной составляющей спектра сигнала и компрессорной составляющей. Следовательно, возникает необходимость в идентификации в области планерной составляющей спектра сигнала полученных отсчетов доплеровских частот при отражении РЛ сигнала от планера ВЦ-самолета с ТРД и воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM.
то есть либо принимать разность между первым отсчетом доплеровской частоты в области планерной составляющей спектра сигнала и компрессорной составляющей, либо принимать разность между вторым отсчетом доплеровской частоты в области планерной составляющей спектра сигнала и компрессорной составляющей. Следовательно, возникает необходимость в идентификации в области планерной составляющей спектра сигнала полученных отсчетов доплеровских частот при отражении РЛ сигнала от планера ВЦ-самолета с ТРД и воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM.
Цель изобретения - распознать с вероятностью, не ниже заданной, тип сопровождаемой воздушной цели-самолета с турбореактивным двигателем при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM.
Для достижения цели в способе сопровождения ВЦ при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM, заключающимся в том, что отраженный от ВЦ-самолета с ТРД радиолокационный сигнал на промежуточной частоте с помощью процедуры БПФ преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями РЛ сигнала от планера сопровождаемой ВЦ и вращающихся лопаток рабочего колеса КНД ее силовой установки, в области планерных составляющих доплеровских частот определяется первый отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который поступает на вход первого калмановского фильтра, функционирующего в соответствии с выражениями (1)-(6), определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся слева на единицы кГц по доплеровской частоте относительно первого отсчета доплеровской частоты, который поступает на вход калмановского фильтра сопровождения первой компрессорной составляющей спектра сигнала, также функционирующего в соответствии с выражениями (1)-(6), и обусловленной его отражениями от лопаток рабочего колеса первой ступени КНД, на каждом k-ом такте работы обоих калмановских фильтров сопровождения определяется оценка разности  между оцененными первыми значениями доплеровских частот
между оцененными первыми значениями доплеровских частот  и лопаток рабочего колеса первой ступени
и лопаток рабочего колеса первой ступени  КНД силовой установки ВЦ-самолета с ТРД, весь диапазон возможных значений оценок разностей между планерной и компрессорной составляющих спектра сигнала
КНД силовой установки ВЦ-самолета с ТРД, весь диапазон возможных значений оценок разностей между планерной и компрессорной составляющих спектра сигнала  априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона (где
априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона (где  ), соответствующего q-му типу цели, определяются выражениями (7)и (8), за К промежуточных тактов работы обоих калмановских фильтров вычисляется вероятность Pq попадания величины
), соответствующего q-му типу цели, определяются выражениями (7)и (8), за К промежуточных тактов работы обоих калмановских фильтров вычисляется вероятность Pq попадания величины  в каждый из априорно сформированный q- поддиапазон, определяется номер q-го поддиапазона, для которого величина вероятности Pq максимальна, максимальное значение величины Pq max сравнивается с пороговым значением вероятности распознавания типа цели Рпор, при Pq max≥Рпор принимается решение о распознавании q-го типа сопровождаемой ВЦ-самолета с ТРД с вероятностью Pq max, не ниже заданной, в противном случае принимается решение о невозможности распознать тип сопровождаемой ВЦ с заданной вероятностью, дополнительно при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM в области планерных составляющих доплеровских частот определяется второй отсчет доплеровской частоты, соответствующий амплитуде, соизмеримой со спектральной составляющей спектра сигнала, имеющей максимальную амплитуду в области планерных доплеровских частот, который поступает на вход второго калмановского фильтра, функционирующего также в соответствии с выражениями (1)-(6), на каждом k-ом такте работы второго калмановского фильтра и калмановского фильтра сопровождения первой компрессорной составляющей спектра сигнала определяется оценка разности
в каждый из априорно сформированный q- поддиапазон, определяется номер q-го поддиапазона, для которого величина вероятности Pq максимальна, максимальное значение величины Pq max сравнивается с пороговым значением вероятности распознавания типа цели Рпор, при Pq max≥Рпор принимается решение о распознавании q-го типа сопровождаемой ВЦ-самолета с ТРД с вероятностью Pq max, не ниже заданной, в противном случае принимается решение о невозможности распознать тип сопровождаемой ВЦ с заданной вероятностью, дополнительно при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM в области планерных составляющих доплеровских частот определяется второй отсчет доплеровской частоты, соответствующий амплитуде, соизмеримой со спектральной составляющей спектра сигнала, имеющей максимальную амплитуду в области планерных доплеровских частот, который поступает на вход второго калмановского фильтра, функционирующего также в соответствии с выражениями (1)-(6), на каждом k-ом такте работы второго калмановского фильтра и калмановского фильтра сопровождения первой компрессорной составляющей спектра сигнала определяется оценка разности  между оцененными вторыми значениями доплеровских частот
между оцененными вторыми значениями доплеровских частот  и лопаток рабочего колеса первой ступени
и лопаток рабочего колеса первой ступени  КНД силовой установки ВЦ-самолета с ТРД, определяются производные модулей разностей
КНД силовой установки ВЦ-самолета с ТРД, определяются производные модулей разностей  , которые сравниваются с пороговым значением ε, близким к нулю, при выполнении условий
, которые сравниваются с пороговым значением ε, близким к нулю, при выполнении условий  принимается решение о том, что первый отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала обусловлен воздействием сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM, а второй отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала, обусловлен его отражениями от планера ВЦ-самолета с ТРД, в этом случае принимается, что разность доплеровских частот
принимается решение о том, что первый отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала обусловлен воздействием сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM, а второй отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала, обусловлен его отражениями от планера ВЦ-самолета с ТРД, в этом случае принимается, что разность доплеровских частот  и оценка планерной составляющей спектра сигнала будет определяться, как
и оценка планерной составляющей спектра сигнала будет определяться, как  при выполнении условий
при выполнении условий  принимается решение о том, что первый отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала обусловлен отражениями его от планера ВЦ-самолета с ТРД, а второй отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала обусловлен воздействием сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM, в этом случае принимается, что разность доплеровских частот
принимается решение о том, что первый отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала обусловлен отражениями его от планера ВЦ-самолета с ТРД, а второй отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала обусловлен воздействием сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM, в этом случае принимается, что разность доплеровских частот  и оценка планерной составляющей спектра сигнала будет определяться, как
и оценка планерной составляющей спектра сигнала будет определяться, как 
Новыми признаками, обладающими существенными отличиями, являются:
1. Параллельное сопровождение по доплеровским частотам, обусловленными отражениями РЛ сигнала от планера цели и вращающихся частей первой ступени КНД силовой установки сопровождаемой ВЦ, а также воздействием сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM.
2. Идентификация отсчетов доплеровских частот в'области планерной составляющей спектра сигнала на основе сравнения производных модулей  с пороговым значением е, близким к нулю.
с пороговым значением е, близким к нулю.
3. Принятие решения о том, что первый отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала обусловлен воздействием сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM, а второй отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала, обусловлен его отражениями от планера ВЦ-самолета с ТРД при выполнении условий  и формирование разности доплеровских частот
и формирование разности доплеровских частот  и оценки планерной составляющей спектра сигнала, как
и оценки планерной составляющей спектра сигнала, как 
4. Принятие решения о том, что второй отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала обусловлен воздействием сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM, а первый отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала, обусловлен его отражениями от планера ВЦ-самолета с ТРД при выполнении условий  и формирование разности доплеровских частот
и формирование разности доплеровских частот  и оценки планерной составляющей спектра сигнала, как
и оценки планерной составляющей спектра сигнала, как 
Данные признаки обладают существенными отличиями, так как в известных способах не обнаружены.
Применение новых признаков в совокупности с известными позволит распознать с вероятностью, не ниже заданной, тип сопровождаемой воздушной цели-самолета с турбореактивным двигателем при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM.
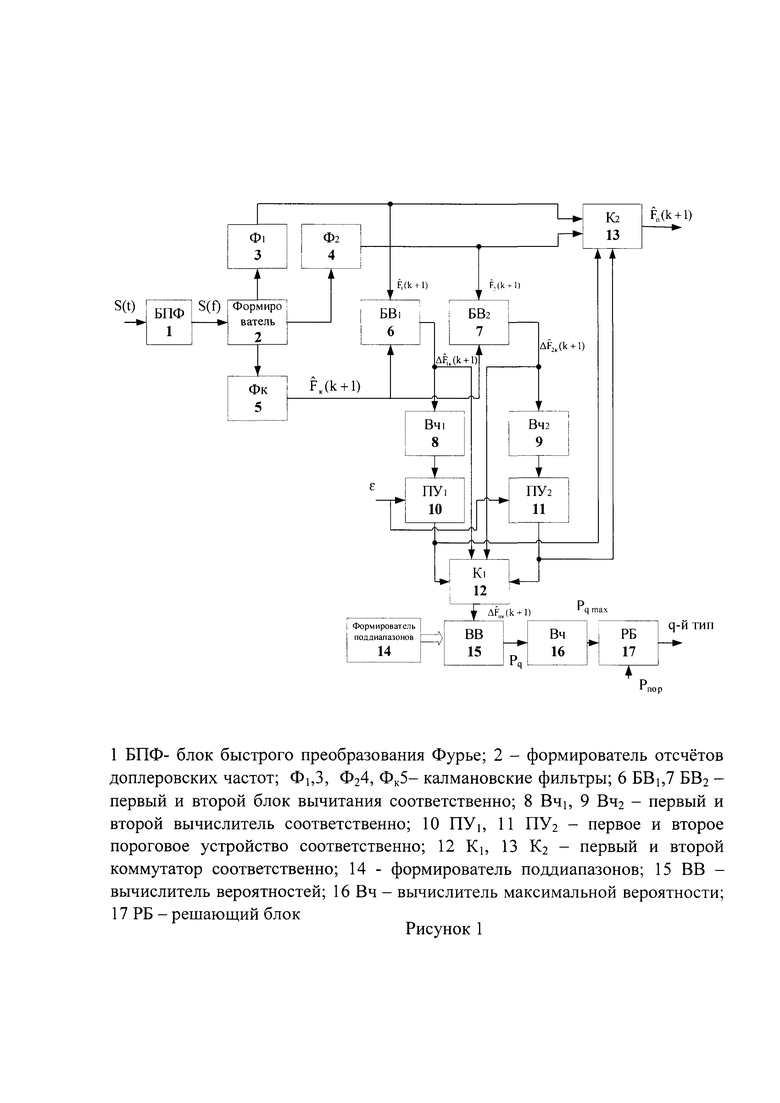
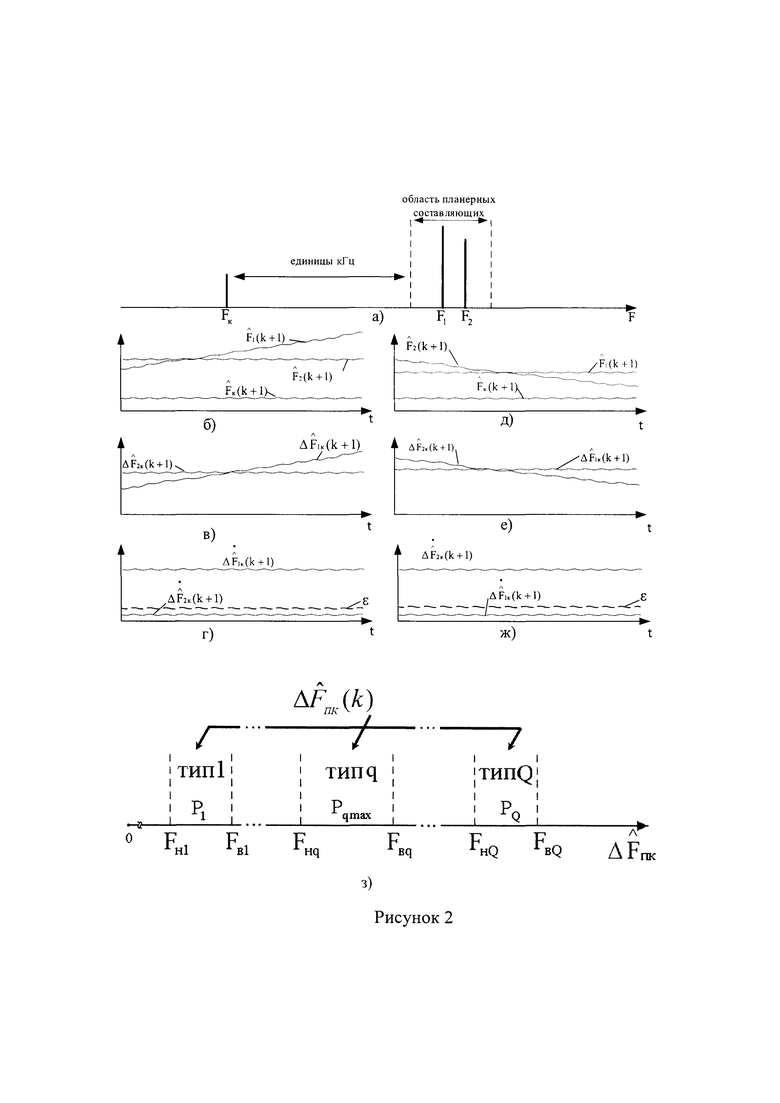
На рисунке 1 приведена блок-схема, поясняющая предлагаемый способ, на рисунке 2 (а, б, в, г, д, е, ж, з) - эпюры, поясняющие способ сопровождения ВЦ при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM.
Предлагаемый способ сопровождения воздушной цели при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM осуществляется следующим образом. На вход блока 1 БПФ (рисунок 1) на промежуточной частоте поступает сигнал S(t), отраженный от ВЦ-самолета с ТРД, который с помощью процедуры БПФ преобразуется в амплитудно-частотный спектр S(f) (рисунок 2а), составляющие которого обусловлены отражениями сигнала от планера сопровождаемой ВЦ и вращающихся частей КНД ее силовой установки, а также воздействием сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM. В формирователе 2 (рисунок 1) отсчетов доплеровских частот, во-первых (рисунок 2а), в области планерных составляющих доплеровских частот определяется первый отсчет F1 доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который поступает на вход (рисунок 1) первого калмановского фильтра Ф1 3, функционирующего в соответствии с выражениями (1)-(6), во-вторых, определяется второй отсчет F2 доплеровской частоты, соответствующий амплитуде, соизмеримой со спектральной составляющей спектра сигнала, имеющей максимальную амплитуду в области планерных доплеровских частот, который поступает на вход второго калмановского фильтра Ф2 4, также функционирующего в соответствии с выражениями (1)-(6), в-третьих, определяется отсчет доплеровской частоты Fк, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся слева на единицы кГц по доплеровской частоте относительно первого и второго отсчетов доплеровской частоты, который поступает на вход калмановского фильтра Фк 5 сопровождения первой компрессорной составляющей спектра сигнала, функционирующего в соответствии с выражениями (1)-(6) и обусловленной отражениями РЛ сигнала от лопаток рабочего колеса первой ступени КНД.
На выходах калмановских фильтров Ф13, Ф24 и Фк5 формируются (рисунки 2б, д) соответственно оценки доплеровских частот  и
и 
На каждом k-ом такте работы (рисунок 1) трех калмановских фильтров Ф13, Ф24 и Фк5 в первом БВ1 6 и втором БВ2 7 блоках вычитания определяются (рисунки 2в, е) соответственно оценки разности  между оцененными первыми значениями доплеровских частот
между оцененными первыми значениями доплеровских частот  и лопаток рабочего колеса первой ступени
и лопаток рабочего колеса первой ступени  КНД воздушной цели-самолета с ТРД и
КНД воздушной цели-самолета с ТРД и  между оцененными вторыми значениями доплеровских частот
между оцененными вторыми значениями доплеровских частот  и лопаток рабочего колеса первой ступени
и лопаток рабочего колеса первой ступени  В первом Вч1 8 и во втором Вч2 9 вычислителях (рисунок 1) определяются производные модулей
В первом Вч1 8 и во втором Вч2 9 вычислителях (рисунок 1) определяются производные модулей  которые сравниваются в соответственно в первом ПУ1 10 и втором ПУ2 11 пороговых устройствах с пороговым значением е, близким к нулю (рисунки 2 г, ж).
которые сравниваются в соответственно в первом ПУ1 10 и втором ПУ2 11 пороговых устройствах с пороговым значением е, близким к нулю (рисунки 2 г, ж).
При выполнении условий  в первом пороговом устройстве 10 и
в первом пороговом устройстве 10 и  во втором пороговом устройстве 11 (рисунок 2г) принимается решение о том, что первый отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала обусловлен воздействием сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM, а второй отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала, обусловлен его отражениями от планера ВЦ-самолета с ТРД. В этом случае (рисунок 1) на выходе первого коммутатора К1 12 формируется разность доплеровских частот
во втором пороговом устройстве 11 (рисунок 2г) принимается решение о том, что первый отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала обусловлен воздействием сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM, а второй отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала, обусловлен его отражениями от планера ВЦ-самолета с ТРД. В этом случае (рисунок 1) на выходе первого коммутатора К1 12 формируется разность доплеровских частот  и оценка планерной составляющей спектра сигнала на выходе второго коммутатора К2 13 будет определяться, как
и оценка планерной составляющей спектра сигнала на выходе второго коммутатора К2 13 будет определяться, как 
При выполнении условий  в первом пороговом устройстве 10 и
в первом пороговом устройстве 10 и  во втором пороговом устройстве 11 (рисунок 2ж) принимается решение о том, что первый отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала обусловлен отражениями его от планера ВЦ-самолета с ТРД, а второй отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала обусловлен воздействием сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM. В этом случае (рисунок 1) на выходе первого коммутатора К112 формируется разность доплеровских частот
во втором пороговом устройстве 11 (рисунок 2ж) принимается решение о том, что первый отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала обусловлен отражениями его от планера ВЦ-самолета с ТРД, а второй отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала обусловлен воздействием сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM. В этом случае (рисунок 1) на выходе первого коммутатора К112 формируется разность доплеровских частот  и оценка планерной составляющей спектра сигнала на выходе второго коммутатора К213 будет определяться, как
и оценка планерной составляющей спектра сигнала на выходе второго коммутатора К213 будет определяться, как 
В формирователе 14 поддиапазонов разностей  весь диапазон возможных значений оценок разностей
весь диапазон возможных значений оценок разностей  априорно разбивается (рисунок 2з) на Q неперекрывающихся друг с другом поддиапазонов, при этом нижняя FHq и верхняя FBq границы каждого q-го поддиапазона
априорно разбивается (рисунок 2з) на Q неперекрывающихся друг с другом поддиапазонов, при этом нижняя FHq и верхняя FBq границы каждого q-го поддиапазона  соответствующего q-му типу цели, определяются выражениями (7) и (8). За К промежуточных тактов работы калмановских фильтров (рисунок 1) Ф13, Ф24 и Фк5 в вычислителе ВВ 15 вероятностей определяется вероятность Pq попадания сформированной на выходе первого коммутатора К112 величины
соответствующего q-му типу цели, определяются выражениями (7) и (8). За К промежуточных тактов работы калмановских фильтров (рисунок 1) Ф13, Ф24 и Фк5 в вычислителе ВВ 15 вероятностей определяется вероятность Pq попадания сформированной на выходе первого коммутатора К112 величины  в каждый из априорно сформированный q-й поддиапазон. В вычислителе Вч 16 вероятностей определяется номер q-го поддиапазона, для которого величина вероятности Pq максимальна. Это максимальное значение величины Pq max в решающем блоке РБ 17 сравнивается с заданным пороговым значением вероятности распознавания типа цели Рпор. Если Pq max≥Рпор принимается решение о распознавании q-го типа сопровождаемой ВЦ-самолета с ТРРД с вероятностью Pq max (рисунок 2з), не ниже заданной, в противном случае принимается решение о невозможности распознать тип сопровождаемой ВЦ с заданной вероятностью.
в каждый из априорно сформированный q-й поддиапазон. В вычислителе Вч 16 вероятностей определяется номер q-го поддиапазона, для которого величина вероятности Pq максимальна. Это максимальное значение величины Pq max в решающем блоке РБ 17 сравнивается с заданным пороговым значением вероятности распознавания типа цели Рпор. Если Pq max≥Рпор принимается решение о распознавании q-го типа сопровождаемой ВЦ-самолета с ТРРД с вероятностью Pq max (рисунок 2з), не ниже заданной, в противном случае принимается решение о невозможности распознать тип сопровождаемой ВЦ с заданной вероятностью.
Таким образом, применение предлагаемого изобретения позволит распознать с вероятностью, не ниже заданной, тип сопровождаемой воздушной цели-самолета с турбореактивным двигателем при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Казаринов Ю.М., Соколов А.И., Юрченко Ю.С. Проектирование устройств фильтрации радиосигналов. - Л.: изд. Ленинградского университета, 1985, с. 150-151 (аналог).
2. Пат. 2419815 Российская Федерация, МПК G01S 13/52 (2006.01). Способ сопровождения воздушной цели из класса «самолет с турбореактивным двигателем» [Текст] / Богданов А.В., Васильев О.В., Исаков И.Н., Ситников А.Г., Филонов А.А.; заявитель и патентообладатель ОАО "ГСКБ "АЛМА3-АНТЕЙ" им. АКАДЕМИКА А.А. РАСПЛЕТИНА (RU). - №2009140853/09; заявл. 03.11.2009; опубл. 27.05.2011, Бюл. №15. - 12 с. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЁТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" ПРИ ВОЗДЕЙСТВИИ УВОДЯЩЕЙ ПО СКОРОСТИ ПОМЕХИ | 2015 |
|
RU2579353C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при воздействии имитирующих помех | 2020 |
|
RU2735314C1 |
| Способ распознавания типового состава групповой воздушной цели из класса "самолеты с турбореактивными двигателями" на основе калмановской фильтрации и нейронной сети | 2022 |
|
RU2786518C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТЫ С ТУРБОРЕАКТИВНЫМИ ДВИГАТЕЛЯМИ" | 2011 |
|
RU2456633C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" | 2009 |
|
RU2419815C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при воздействии уводящей по скорости помехи | 2019 |
|
RU2732281C1 |
| Способ всеракурсного распознавания типового состава групповой воздушной цели из класса "самолеты с турбореактивными двигателями" на основе калмановской фильтрации и нейронных сетей | 2024 |
|
RU2835772C1 |
| Способ сопровождения в радиолокационной станции групповой воздушной цели из класса "самолёты с турбореактивными двигателями" при воздействии уводящих по скорости помех | 2016 |
|
RU2617110C1 |
| Способ распознавания типового состава групповой воздушной цели различных классов при различных условиях ее полета на основе калмановской фильтрации и нейронной сети | 2022 |
|
RU2802653C1 |
| Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2018 |
|
RU2665031C1 |
Изобретение относится к области вторичной цифровой обработки радиолокационных сигналов и может быть использовано для сопровождения и распознавания типа воздушной цели (ВЦ)-самолета с турбореактивным двигателем (ТРД) при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM (цифровая радиочастотная память). Достигаемый технический результат - распознавание с вероятностью не ниже заданной типа сопровождаемой ВЦ-самолета с ТРД при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM. Способ заключается в том, что отраженный от ВЦ-самолета с ТРД радиолокационный сигнал с помощью процедуры быстрого преобразования Фурье преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планера сопровождаемой ВЦ и вращающихся частей компрессора низкого давления (КНД) ее силовой установки, а также воздействием сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM. В области планерных составляющих доплеровских частот, во-первых, определяется первый отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который поступает на вход первого калмановского фильтра, во-вторых, определяется второй отсчет доплеровской частоты, соответствующий амплитуде, соизмеримой со спектральной составляющей спектра сигнала, имеющей максимальную амплитуду в области планерных доплеровских частот, который поступает на вход второго калмановского фильтра, в-третьих, определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся слева на единицы кГц по доплеровской частоте относительно первого и второго отсчетов доплеровских частот, который поступает на вход калмановского фильтра сопровождения первой компрессорной составляющей спектра сигнала, обусловленной отражениями сигнала от лопаток рабочего колеса первой ступени КНД. На каждом такте работы трех калмановских фильтров определяются соответственно оценки разности между оцененными первыми значениями доплеровских частот и лопаток рабочего колеса первой ступени КНД воздушной цели-самолета с ТРД и между оцененными вторыми значениями доплеровских частот и лопаток рабочего колеса первой ступени КНД. Определяются производные модулей оценок разностей, которые сравниваются с пороговым значением ε, близким к нулю. Весь диапазон возможных значений оценок разностей  априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов. За К промежуточных тактов работы всех трех калмановских фильтров определяется вероятность Pq попадания сформированной величины
априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов. За К промежуточных тактов работы всех трех калмановских фильтров определяется вероятность Pq попадания сформированной величины  в каждый из априорно сформированный q-й поддиапазон. Определяется номер q-го поддиапазона, для которого величина вероятности Pq максимальна. Это максимальное значение величины Pq max сравнивается с заданным пороговым значением вероятности распознавания типа цели Рпор. Если Pq max≥Рпор, принимается решение о распознавании q-го типа сопровождаемой ВЦ-самолета с ТРРД с вероятностью Pq max, не ниже заданной, в противном случае принимается решение о невозможности распознать тип сопровождаемой ВЦ с заданной вероятностью. 2 ил.
в каждый из априорно сформированный q-й поддиапазон. Определяется номер q-го поддиапазона, для которого величина вероятности Pq максимальна. Это максимальное значение величины Pq max сравнивается с заданным пороговым значением вероятности распознавания типа цели Рпор. Если Pq max≥Рпор, принимается решение о распознавании q-го типа сопровождаемой ВЦ-самолета с ТРРД с вероятностью Pq max, не ниже заданной, в противном случае принимается решение о невозможности распознать тип сопровождаемой ВЦ с заданной вероятностью. 2 ил.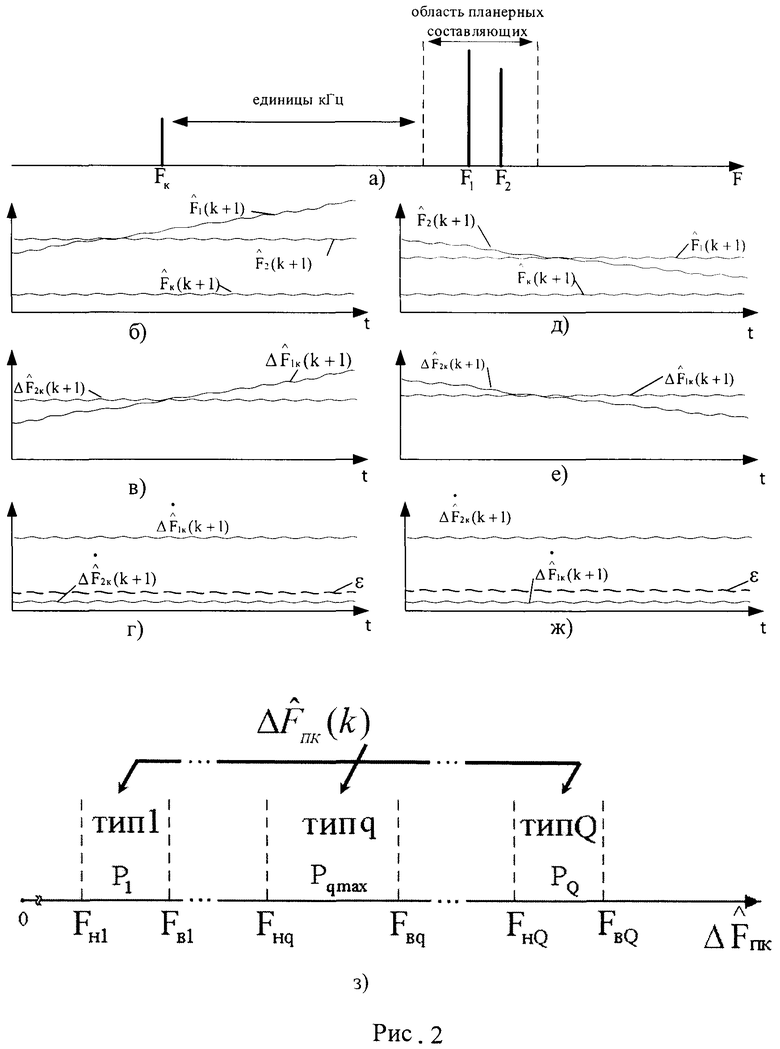
Способ сопровождения воздушной цели при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM (цифровая радиочастотная память), заключающийся в том, что отраженный от воздушной цели-самолета с турбореактивным двигателем радиолокационный сигнал на промежуточной частоте с помощью процедуры быстрого преобразования Фурье преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планера сопровождаемой воздушной цели и вращающихся лопаток рабочего колеса компрессора низкого давления ее силовой установки, в области планерных составляющих доплеровских частот определяется первый отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который поступает на вход первого калмановского фильтра, определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся слева на единицы кГц по доплеровской частоте относительно первого отсчета доплеровской частоты, который поступает на вход калмановского фильтра сопровождения первой компрессорной составляющей спектра сигнала, обусловленной его отражениями от лопаток рабочего колеса первой ступени компрессора низкого давления, на каждом k-ом такте работы обоих калмановских фильтров определяется оценка разности  между оцененными первыми значениями доплеровских частот
между оцененными первыми значениями доплеровских частот  и лопаток рабочего колеса первой ступени
и лопаток рабочего колеса первой ступени  компрессора низкого давления силовой установки воздушной цели-самолета с турбореактивным двигателем, весь диапазон возможных значений оценок разностей между планерной и компрессорной составляющих спектра сигнала
компрессора низкого давления силовой установки воздушной цели-самолета с турбореактивным двигателем, весь диапазон возможных значений оценок разностей между планерной и компрессорной составляющих спектра сигнала  априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона, где
априорно разбивается на Q неперекрывающихся друг с другом поддиапазонов, нижняя FHq и верхняя FBq границы каждого q-го поддиапазона, где  соответствующего q-му типу цели, определяются выражениями
соответствующего q-му типу цели, определяются выражениями


где FP - максимальная частота вращения ротора компрессора низкого давления силовой установки q-го типа воздушной цели;
n1 и n2 - соответственно минимальное и максимальное значение величины относительных оборотов вращения ротора силовой установки, одинаковые для всех типов воздушных целей;
Nл - количество лопаток рабочего колеса первой ступени компрессора низкого давления силовой установки воздушной цели-самолета с турбореактивным двигателем,
за К промежуточных тактов работы обоих калмановских фильтров вычисляется вероятность Pq попадания величины в каждый из априорно сформированный q-й поддиапазон, определяется номер q-го поддиапазона, для которого величина вероятности Pq максимальна, максимальное значение величины Pq max сравнивается с пороговым значением вероятности распознавания типа цели Рпор, при Pq max≥Рпор принимается решение о распознавании q-го типа сопровождаемой воздушной цели-самолета с турбореактивным двигателем с вероятностью Pq max, не ниже заданной, в противном случае принимается решение о невозможности распознать тип сопровождаемой воздушной цели-самолета с турбореактивным двигателем с заданной вероятностью, отличающийся тем, что при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM в области планерных составляющих доплеровских частот определяется второй отсчет доплеровской частоты, соответствующий амплитуде, соизмеримой со спектральной составляющей спектра сигнала, имеющей максимальную амплитуду в области планерных доплеровских частот, который поступает на вход второго калмановского фильтра, на каждом k-ом такте работы второго калмановского фильтра и калмановского фильтра сопровождения первой компрессорной составляющей спектра сигнала определяется оценка разности  между оцененными вторыми значениями доплеровских частот
между оцененными вторыми значениями доплеровских частот  и лопаток рабочего колеса первой ступени компрессора низкого давления силовой установки воздушной цели-самолета с турбореактивным двигателем, определяются производные модулей разностей
и лопаток рабочего колеса первой ступени компрессора низкого давления силовой установки воздушной цели-самолета с турбореактивным двигателем, определяются производные модулей разностей  и
и  которые сравниваются с пороговым значением ε, близким к нулю, при выполнении условий
которые сравниваются с пороговым значением ε, близким к нулю, при выполнении условий  принимается решение о том, что первый отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала обусловлен воздействием сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM, а второй отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала, обусловлен его отражениями от планера воздушной цели-самолета с турбореактивным двигателем, в этом случае принимается, что разность доплеровских частот
принимается решение о том, что первый отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала обусловлен воздействием сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM, а второй отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала, обусловлен его отражениями от планера воздушной цели-самолета с турбореактивным двигателем, в этом случае принимается, что разность доплеровских частот  и оценка планерной составляющей спектра сигнала будет определяться, как
и оценка планерной составляющей спектра сигнала будет определяться, как  при выполнении условий
при выполнении условий  принимается решение о том, что первый отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала обусловлен отражениями его от планера воздушной цели-самолета с турбореактивным двигателем, а второй отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала обусловлен воздействием сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM, в этом случае принимается, что разность доплеровских частот
принимается решение о том, что первый отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала обусловлен отражениями его от планера воздушной цели-самолета с турбореактивным двигателем, а второй отсчет доплеровской частоты с соответствующей амплитудой спектра сигнала обусловлен воздействием сигналоподобной с модуляцией доплеровской частоты помехи типа DRFM, в этом случае принимается, что разность доплеровских частот  и оценка планерной составляющей спектра сигнала будет определяться, как
и оценка планерной составляющей спектра сигнала будет определяться, как 
| Способ функционирования импульсно-доплеровской бортовой радиолокационной станции с распознаванием воздействия помехи из вынесенной точки пространства при обнаружении воздушной цели, прикрываемой постановщиком помех | 2018 |
|
RU2688188C1 |
| Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2018 |
|
RU2665031C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" | 2009 |
|
RU2419815C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| БОГДАНОВ А.В., ЗАКОМОЛДИН Д.В., ДОКУЧАЕВ Я.С., НОВИЧЁНОК В.А., КОЧЕТОВ И.В | |||
| Алгоритм идентификации уводящих по дальности и скорости помех в импульсно-доплеровских РЛС в интересах формирования достоверных оценок дальности и скорости при | |||

