Область техники
Настоящее изобретение относится к устройству управления электродвигателя переменного тока для приведения в движение электромобиля и, в частности, относится к устройству управления, пригодному для управления синхронным электродвигателем с постоянными магнитами.
Предшествующий уровень техники
В последние годы в таких областях применения электродвигателей переменного тока, как промышленное оборудование, бытовые приборы и автомобили, способ для управления приведением в действие синхронного электродвигателя с постоянными магнитами с помощью инвертора становится более популярным, чем способ в предшествующем уровне техники для управления приведением в действие асинхронного электродвигателя с помощью инвертора. Синхронный электродвигатель с постоянными магнитами известен как высокоэффективный электродвигатель по сравнению с асинхронным электродвигателем по следующим причинам. Поскольку магнитный поток устанавливается посредством постоянного магнита, включенного в ротор, ток, соответствующий току возбуждения, становится ненужным. Поскольку ток не протекает через ротор, вторичные потери в меди не формируются. Крутящий момент фактически получается посредством использования крутящего момента магнитного сопротивления, вызываемого посредством разности магнитного сопротивления в роторе, в дополнение к крутящему моменту, сформированному посредством магнитного потока постоянного магнита. Соответственно, применение синхронного электродвигателя с постоянными магнитами в приводной системе электромобиля изучается в последние годы.
Общий способ управления синхронного электродвигателя с постоянными магнитами состоит в том, чтобы выполнять управление током посредством системы управления током. Значение тока при детектировании из детектора тока, расположенного на выходной стороне инвертора, разделяется на составляющую d-оси (т.е. составляющую тока магнитного потока) в системе вращающихся координат, вращающуюся синхронно с фазой вращения ротора электродвигателя, и составляющую q-оси (т.е. составляющую тока крутящего момента), перпендикулярную к нему. Величина напряжения, приложенного к электродвигателю, регулируется так, что ток d/q-осей согласуется с командой управления током d/q-осей, вычисляемой из команды управления крутящим моментом при делении.
В случае если рассматривается вариант, когда синхронный электродвигатель с постоянными магнитами (в дальнейшем в этом документе называемый электродвигателем) применяется к приводной системе электромобиля, устройство управления электродвигателя переменного тока обязательно должно быть уменьшено по размеру и весу, поскольку оборудование должно быть установлено в ограниченном пространстве под полом транспортного средства. В общем, постоянный ток при напряжении порядка 1500-3000 В вводится в инвертор, включенный в устройство управления электродвигателя переменного тока для электромобиля. Следовательно, используется устойчивый к высокому напряжению переключающий элемент, выдерживающий значения порядка 3300-6500 В. Для такого устойчивого к высокому напряжению переключающего элемента как потери на переключение, так и потери на проводимость являются большими. Чтобы исключить необходимость в лишнем охлаждающем устройстве переключающего элемента, включающего в себя охладитель и охлаждающий вентилятор, допустимая частота переключения составляет максимум порядка 1000 Гц. Это низкое значение порядка от одной десятой до одной двадцатой по сравнению, например, с частотой для бытовых приборов, промышленных инверторов и электромобилей.
Для уменьшения размера и веса устройства управления электродвигателя переменного тока важно уменьшать потери, образуемые посредством встроенного переключающего элемента, чтобы уменьшать размер и вес его охлаждающего устройства. Соответственно, необходимо снижать ток электродвигателя до максимально низкой степени посредством задания частоты переключения максимально низкой и приложения максимально возможного входного напряжения инвертора к электродвигателю.
Между тем, максимальная выходная частота инвертора (т.е. выходная частота инвертора на расчетной максимальной скорости электромобиля) при применении в электромобиле составляет приблизительно 400 Гц. Например, в случае если выходная частота инвертора составляет около 400 Гц, что является максимальным значением, число импульсов, включенных в полупериод выходного напряжения инвертора, равно приблизительно 1,875, что получается из частоты переключения, поделенной на выходную частоту инвертора, что приводит к очень небольшому результату при условии, что частота переключения инвертора составляет приблизительно 1000 Гц, что является максимумом.
Когда электродвигатель приводится в действие в этом состоянии, коэффициент пульсации и положение импульса, включенного, соответственно, в положительный полупериод и отрицательный полупериод выходного напряжения инвертора, являются несбалансированными. Затем симметрия между положительной величиной и отрицательной величиной напряжения, приложенного к электродвигателю (т.е. линейного напряжения), теряется, так что вследствие формирования электрической вибрации и пульсации крутящего момента в электродвигателе вызываются шум и вибрация.
Соответственно, так называемый синхронный импульсный режим, такой как синхронный пятиимпульсный режим, синхронный трехимпульсный режим и т.п., для определения синхронизации переключения синхронно с выходным напряжением инвертора, используется в области, где выходная частота инвертора является относительно высокой. Дополнительно, в случае если максимальное напряжение прикладывается к электродвигателю, электродвигатель работает с использованием одноимпульсного режима, в котором выходное напряжение инвертора является прямоугольной волной. В синхронном режиме и одноимпульсном режиме коэффициент пульсации и положение импульса, включенного в полупериод выходного напряжения инвертора, являются постоянными и не меняются в зависимости от времени. Следовательно, коэффициент пульсации и положение импульса являются идентичными между положительным полупериодом и отрицательным полупериодом выходного напряжения инвертора. Соответственно, поскольку симметрия между положительной величиной и отрицательной величиной напряжения, приложенного к электродвигателю, сохраняется, в электродвигателе не формируются электрическая вибрация и пульсация крутящего момента.
Как описано выше, для стабильного возбуждения инвертора для электромобиля выбирается асинхронный импульсный режим, в котором частота переключения не является синхронной с выходной частотой инвертора (например, при постоянной частоте в 1000 Гц), в области возбуждения, где выходная частота инвертора является относительно низкой. Одноимпульсный режим, в котором выходное напряжение инвертора является прямоугольной волной, или синхронный импульсный режим выбирается в области возбуждения, где выходная частота инвертора является относительно высокой. Таким образом, электродвигатель приводится в действие в то время, когда импульсный режим переключается в соответствии с выходной частотой инвертора.
В синхронном импульсном режиме или одноимпульсном режиме число импульсов, включенных в полупериод выходного напряжения инвертора, является небольшим. Соответственно, чтобы обеспечивать стабильность управления, выполняется конфигурация, в которой возможны снижение реакции на управление током вышеуказанной системы управления током, прекращение вычисления системы управления током и переключение на управление регулированием только фаз напряжения, приложенного к электродвигателю.
Патентный документ 1. Выложенная заявка на патент Японии 2006-081287.
При управлении для приведения в действие синхронного электродвигателя с постоянными магнитами необходимо надлежащим образом определять команду управления выходным напряжением инвертора в соответствии с положением ротора электродвигателя. В общем, фаза команды управления выходным напряжением инвертора определяется на основе сигнала положения ротора электродвигателя, полученного посредством модуля детектирования положения, расположенного на осевом конце электродвигателя. Вследствие отклонения от истинного значения, содержащегося в выходном сигнале детектора положения, отклонение также формируется в команде управления выходным напряжением инвертора, которая определяется на ее основе. Помимо этого вследствие неравномерности падения напряжения включения для множества переключающих элементов, формирующих инвертор, варьирования корреляции полного сопротивления электродвигателя и т.п. может иметь место то, что трехфазная симметрия напряжения электродвигателя теряется и формируется трехфазный дисбаланс тока электродвигателя.
Как описано выше, в частности, в области синхронного импульсного режима и одноимпульсного режима выполняется снижение отклика на управление током для тока d/q-осей, прекращение вычисления системы управления током или переключение на управление регулированием только фаз напряжения, приложенного к электродвигателю. В этом случае эффект подавления трехфазного дисбаланса тока электродвигателя посредством системы управления током снижается или гасится. Соответственно, может иметь место то, что электродвигатель приводится в действие в то время, когда сохраняется трехфазный дисбаланс тока электродвигателя. В этом состоянии формируется пульсация крутящего момента в электродвигателе, так что шумовая характеристика и ходовые качества ухудшаются.
Как описано выше, в синхронном электродвигателе с постоянными магнитами постоянный магнит включен в ротор. Когда формируется трехфазный дисбаланс в токе электродвигателя, может иметь место то, что магнитный поток в постоянном магните значительно колеблется и происходит рост температуры вследствие протекания вихревых токов по постоянному магниту. Когда температура возрастает, магнитный поток постоянного магнита снижается. Дополнительно, когда температура превышает предельную температуру, возникает необратимое размагничивание и магнитная сила постоянного магнита теряется даже после того, как температура понижена. Таким образом, синхронный электродвигатель с постоянными магнитами повреждается и не может формировать крутящий момент.
Краткое изложение существа изобретения
Задачей настоящего изобретения является создание устройства управления электродвигателя переменного тока, которое выполняет приведение в действие в синхронном импульсном режиме и одноимпульсном режиме, допускающее подавление трехфазного дисбаланса тока электродвигателя, вызываемого посредством отклонения от истинного значения, содержащегося в выходном сигнале модуля детектирования положения, посредством отклонения команды управления выходным напряжением инвертора, посредством неравномерности падения напряжения включения для переключающих элементов или посредством варьирования корреляции полного сопротивления электродвигателя, и обеспечивающее предотвращение пульсации крутящего момента и повреждения электродвигателя.
Устройство управления электродвигателя переменного тока согласно аспекту изобретения включает в себя трехфазный инвертор, который подключается к источнику постоянного тока и выводит трехфазные переменные токи произвольной частоты и произвольное напряжение на электродвигатель переменного тока; детектор тока, который детектирует ток электродвигателя переменного тока; модуль формирования команд управления напряжением/ШИМ-сигналов, который вычисляет команду управления выходным напряжением инвертора на основе сигнала из детектора тока и формирует сигнал широтно-импульсной модуляции, чтобы управлять переключающим элементом, который расположен в инверторе, на основе команды управления выходным напряжением; и модуль компенсации дисбаланса токов электродвигателя, который формирует величины компенсации дисбаланса токов электродвигателя соответствующих фаз на основе токов, по меньшей мере, любых двух из фаз из токов электродвигателя переменного тока и задает величину компенсации дисбаланса токов электродвигателя оставшейся одной фазы, равной нулю, при этом модуль формирования команд управления напряжением/ШИМ-сигналов прямо или косвенно регулирует сигнал широтно-импульсной модуляции двух фаз на основе величин компенсации дисбаланса токов электродвигателя в соответствии с режимом возбуждения инвертора. Вышеуказанная конфигурация предоставляет устройство управления электродвигателя переменного тока, которое выполняет приведение в действие в синхронном импульсном режиме и одноимпульсном режиме, обеспечивающее подавление трехфазного дисбаланса тока электродвигателя, вызываемого посредством отклонения от истинного значения, содержащегося в выводе модуля определения положения, посредством отклонения команды управления выходным напряжением инвертора, посредством неравномерности падения напряжения включения для переключающих элементов или посредством варьирования корреляции полного сопротивления электродвигателя, и обеспечивающее предотвращение пульсации крутящего момента и повреждения электродвигателя.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
фиг.1 изображает структурную схему устройства управления электродвигателя переменного тока, согласно первому варианту осуществления изобретения;
фиг.2 - пример модуля формирования команд управления напряжением/ШИМ-сигналов, согласно первому варианту осуществления изобретения;
фиг.3 - схему модуля компенсации дисбаланса токов электродвигателя, согласно первому варианту осуществления изобретения;
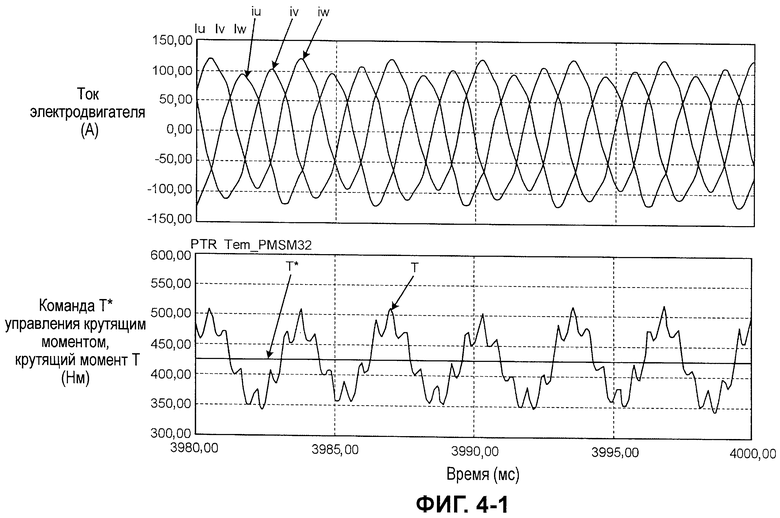
фиг.4-1 - пример форм сигналов токов электродвигателя согласно первому варианту осуществления изобретения в случае, если компенсация дисбаланса токов электродвигателя не выполняется;
фиг.4-2 - пример форм сигналов токов электродвигателя согласно первому варианту осуществления изобретения в случае, если компенсация дисбаланса токов электродвигателя выполняется;
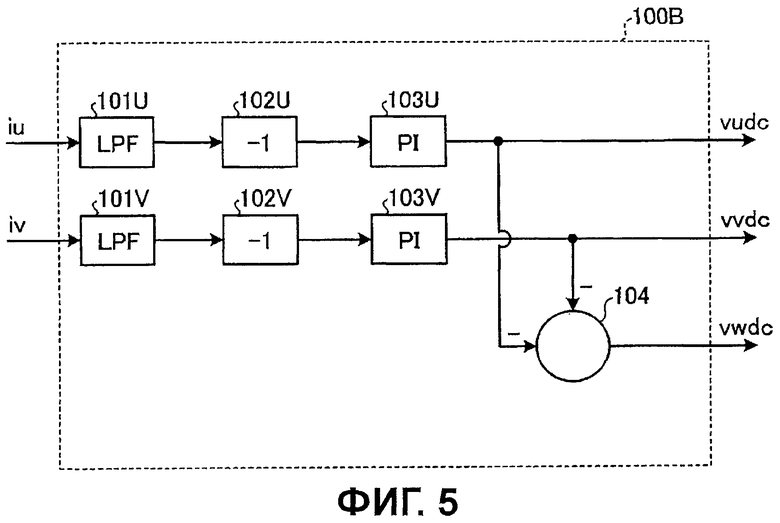
фиг.5 - схему модуля компенсации дисбаланса токов электродвигателя, согласно второму варианту осуществления изобретения;
фиг.6 - схему модуля компенсации дисбаланса токов электродвигателя, согласно третьему варианту осуществления изобретения; и
фиг.7 - схему модуля компенсации дисбаланса токов электродвигателя, согласно четвертому варианту осуществления изобретения.
Описание предпочтительных вариантов осуществления изобретения
Далее подробно описаны варианты осуществления устройства управления электродвигателя переменного тока, согласно изобретению со ссылкой на чертежи. Между тем, изобретение не ограничено приведенными вариантами осуществления.
Первый вариант осуществления
Фиг.1 является видом, иллюстрирующим структурный пример устройства управления электродвигателем переменного тока согласно первому варианту осуществления изобретения. Главная схема содержит конденсатор 1, являющийся источником постоянного тока, инвертор 2, преобразующий постоянное напряжение конденсатора 1 в переменное напряжение произвольной частоты, и синхронный электродвигатель 6 с постоянными магнитами (в дальнейшем в этом документе называемый просто электродвигателем). Схема содержит детектор 8 напряжения для детектирования напряжения на конденсаторе 1 и детекторы 3, 4, 5 тока для детектирования соответственно токов iu, iv, iw электродвигателя, являющихся выходными линейными токами инвертора 2. Электродвигатель 6 содержит круговой датчик 7 положения, являющийся детектором положения для детектирования механического угла θm ротора. Сигналы детектирования вводятся, соответственно, в модули, которые описаны ниже.
Также возможно, чтобы вместо кругового датчика 7 положения использовался кодер. Дополнительно, также можно выполнить способ без датчика положения, чтобы получать сигнал положения посредством вычислений детектированного напряжения, тока и т.п. вместо сигнала положения, полученного посредством кругового датчика 7 положения. В этом случае круговой датчик 7 положения становится ненужным. Таким образом, получение сигнала положения не ограничено использованием кругового датчика 7 положения. Что касается детекторов 3, 4, 5 тока, при условии, что, по меньшей мере, в них имеются две фазы, ток оставшейся фазы, который может быть получен посредством вычисления как сумма токов трех фаз, должен быть нулевым. Соответственно, может выполняться такая конфигурация. Вместо этого также можно получать выходной ток инвертора 2 посредством его воспроизведения из тока на стороне постоянного тока инвертора 2.
Устройство 200 управления электродвигателя переменного тока сконфигурировано таким образом, что команда T* управления крутящим моментом вводится из внешнего устройства управления (не показано), и сконфигурировано с возможностью управления инвертором 2 так, что формирующийся крутящий момент T электродвигателя 6 должен согласовываться с командой T* управления крутящим моментом.
Стробирующие сигналы U, В, W, X, Y, Z, сформированные посредством модуля 50 формирования команд управления напряжением/ШИМ-сигналов, который описан ниже, вводятся в инвертор 2. Переключающий элемент, установленный в инверторе 2, имеет ШИМ-управление. ШИМ-инвертор напряжения является подходящим в качестве инвертора 2, который известен и тем самым не описывается подробно.
Далее описана конфигурация каждого модуля устройства 200 управления электродвигателя переменного тока. Устройство 200 управления электродвигателя переменного тока включает в себя арифметический модуль 95 базовых фазовых углов для вычисления базового фазового угла θe из механического угла θm ротора; модуль 90 трехфазного преобразования координат d/q-осей для формирования тока id d-оси и тока iq q-оси из трехфазных токов iu, iv, iw, определяемых соответственно посредством детекторов 3, 4, 5 тока и базового фазового угла θe; арифметический модуль 70 угловых частот инвертора для вычисления выходной угловой частоты ω инвертора из базового фазового угла θe; модуль 10 формирования команд управления током для формирования команды id* управления током d-оси и команды iq* управления током q-оси из внешне введенной команды T* управления крутящим моментом и выходной угловой частоты ω инвертора; модуль 20 управления током d-оси для выполнения пропорционально-интегрального управления для разности между командой id* управления током d-оси и током d-оси и формирования отклонения pde по току d-оси; модуль 23 управления током q-оси для выполнения пропорционально-интегрального управления для разности между командой iq* управления током q-оси и током q-оси и формирования отклонения pqe по току q-оси; арифметический модуль 21 развязки q-оси для вычисления прямого напряжение vqFF q-оси из команды id* управления током d-оси и угловой частоты ω инвертора; арифметический модуль 22 развязки d-оси для вычисления прямого напряжения vdFF d-оси из команды iq* управления током q-оси и угловой частоты ω инвертора; арифметический модуль 30 коэффициентов модуляции для вычисления коэффициента PMF модуляции из команды vd* управления напряжением d-оси, являющейся суммой отклонения pde по току d-оси и прямого напряжения vdFF d-оси, команды vq* управления напряжением q-оси, являющейся суммой отклонения pqe по току q-оси и прямого напряжения vqFF q-оси, базового фазового угла θe и напряжения EFC конденсатора 1; арифметический модуль 40 управляющих фазовых углов для вычисления управляющего фазового угла θ из команды vd* управления напряжением d-оси, являющейся суммой отклонения pde по току d-оси и прямого напряжения vdFF d-оси, команды vq* управления напряжением q-оси, являющейся суммой отклонения pqe по току q-оси и прямого напряжения vqFF q-оси, и базового фазового угла θe; модуль 50 формирования команд управления напряжением/ШИМ-сигналов для формирования стробирующих сигналов U, В, W, X, Y, Z для инвертора 2 из коэффициента PMF модуляции, управляющего фазового угла θ, выходной частоты инвертора FINV и величин vudc, vvdc, vwdc компенсации дисбаланса токов электродвигателя; и модуль 100A (100B, 100C, 100D) компенсации дисбаланса токов электродвигателя для получения трехфазных токов iu, iv, iw и формирования величины vudc, vvdc, vwdc компенсации дисбаланса токов электродвигателя. Модули 100B, 100C, 100D компенсации дисбаланса токов электродвигателя соответственно представляют модули вариантов осуществления со второго по четвертый.
Далее подробно описана конфигурация каждого из вышеуказанных блоков управления. В арифметическом модуле 95 базовых фазовых углов базовый фазовый угол θe, являющийся электрическим углом, вычисляется из механического угла θm ротора на основе следующего уравнения (1):

Здесь PP обозначает число пар полюсов электродвигателя 6.
В модуле 90 трехфазного преобразования координат d/q-осей ток id d-оси и ток iq d-оси формируются из трехфазных токов iu, iv, iw и базового фазового угла θe на основе следующего уравнения (2):
(формула 1)

В арифметическом модуле 70 угловых частот инвертора выходная угловая частота ω инвертора вычисляется посредством дифференцирования базового фазового угла θe на основе следующего уравнения (3):

Помимо этого выходная частота инвертора FINV вычисляется посредством деления выходной угловой частоты ω инвертора на 2π.
Далее описана конфигурация модуля 10 формирования команд управления током. В модуле 10 формирования команд управления током команда id* управления током d-оси и команда iq* управления током q-оси формируются из внешне введенной команды T* управления крутящим моментом и выходной угловой частоты ω инвертора. Способ формирования может быть управлением максимальным крутящим моментом/током, которое формирует максимальный крутящий момент при определенном токе, или максимально эффективным управлением, которое поддерживает кпд электродвигателя максимальным. Такие способы оптимального управления выполняют регулирование таким образом, что фактический ток электродвигателя 6 согласуется, соответственно, с командой управления током для оптимального крутящего момента (т.е. командой iq* управления током q-оси) и командой управления током для оптимального магнитного потока (т.е. командой id* управления током d-оси), которые получаются с использованием арифметического уравнения и заранее сохраняются в таблице.
Затем модуль 20 управления током d-оси и модуль 23 управления током q-оси соответственно формируют отклонение pde по току d-оси посредством выполнения пропорционально-интегрального усиления для разности между командой id* управления током d-оси и током d-оси и отклонение pqe по току q-оси посредством выполнения пропорционально-интегрального усиления для разности между командой iq* управления током q-оси и током q-оси на основе следующих уравнений (4), (5):
Здесь K1 и K3 обозначают пропорциональные коэффициенты усиления, а K2 и K4 обозначают интегральные коэффициенты усиления.


По причине, описанной выше, в случае приведения в действие, в частности, в синхронном импульсном режиме или одноимпульсном режиме уравнения (4), (5) для управления могут не использоваться. Выходные сигналы pde, pqe могут фиксироваться равными значениям непосредственно перед прекращением вычисления. Альтернативно, выходные сигналы могут постепенно снижаться до нуля.
Арифметический модуль 22 развязки d-оси и арифметический модуль 21 развязки q-оси соответственно вычисляют прямое напряжение vdFF d-оси и прямое напряжение vqFF q-оси на основе следующих уравнений (6), (7):


Здесь R1, Ld, Lq, ϕa и s соответственно обозначают сопротивление первичной обмотки (Ω) электродвигателя 6, индуктивность d-оси (Гн), индуктивность q-оси (Гн), постоянный магнитный поток (Вб) и оператор дифференцирования.
Арифметический модуль 30 коэффициентов модуляции вычисляет на основе следующего уравнения (8) из команды vd* управления напряжением d-оси, являющейся суммой отклонения pde по току d-оси от прямого напряжения vdFF d-оси, команды vq* управления напряжением q-оси, являющейся суммой отклонения pqe по току q-оси от прямого напряжения vqFF q-оси, базового фазового угла θe и напряжения EFC конденсатора 1.

где:


Здесь коэффициент PMF модуляции указывает отношение величины вектора VM* команды управления выходным напряжением инвертора к максимальному напряжению VMax (как задано посредством уравнения (9)), которое может выводиться из инвертора. В случае если PMF=1,0, величина вектора VM* команды управления выходным напряжением инвертора должна быть равной максимальному напряжению VMax, которое может выводиться из инвертора.
Дополнительно, как можно видеть из уравнений (2)-(10), коэффициент PMF модуляции меняется с командой id* управления током d-оси и командой iq* управления током q-оси, которые формируются посредством модуля 10 формирования команд управления током.
Арифметический модуль 40 управляющих фазовых углов вычисляет на основе следующего уравнения (11) управляющий фазовый угол θ из команды vd* управления напряжением d-оси, являющейся суммой отклонения pde по току d-оси от прямого напряжения vdFF d-оси, команды vq* управления напряжением q-оси, являющейся суммой отклонения pqe по току q-оси от прямого напряжения vqFF q-оси, и базового фазового угла θe:

где:

Далее описана конфигурация модуля 50 формирования команд управления напряжением/ШИМ-сигналов. На фиг.2 показан пример конфигурации модуля 50 формирования команд управления напряжением/ШИМ-сигналов согласно первому варианту осуществления изобретения. Как проиллюстрировано на фиг.2, арифметический модуль 55 команд управления напряжением формирует команду Vu** управления базовым напряжением U-фазы, команду Vv** управления базовым напряжением V-фазы и команду Vw** управления базовым напряжением W-фазы, которые являются командами управления трехфазным напряжением, из коэффициента PMF модуляции и управляющего фазового угла θ на основе следующих уравнений (13)-(15):



Затем сумматоры 67-69 формируют команду Vu* управления напряжением U-фазы, команду Vv* управления напряжением V-фазы и команду Vw* управления напряжением W-фазы посредством сложения соответственно нижеупомянутых величин vudc, vvdc, vwdc компенсации дисбаланса токов электродвигателя с командой Vu** управления базовым напряжением U-фазы, командой Vv** управления базовым напряжением V-фазы и командой Vw** управления базовым напряжением W-фазы.
Дополнительно, как описано ниже, несущий сигнал CAR, который должен сравниваться с вышеуказанными командами Vu*, Vv*, Vw* управления напряжением соответствующих фаз, включает в себя, по меньшей мере, асинхронный несущий сигнал и синхронный сигнал. Дополнительно, CAR сконфигурирован с возможностью выбора в соответствии с импульсным режимом, выбираемым посредством модуля 60 обработки переключения импульсных режимов, который является модулем управления импульсным режимом. Здесь асинхронный несущий сигнал, используемый в асинхронном импульсном режиме, является несущим сигналом, имеющим частоту (например, постоянную частоту в 1000 Гц), которая определена как асинхронная с выходной частотой инвертора FINV.
Дополнительно, частота синхронного несущего сигнала синхронизирована как функция от выходной частоты инвертора FINV, так что число и положение импульсов, формирующих выходное напряжение инвертора, должно быть одинаковым между полупериодом положительной стороны и полупериодом отрицательной стороны выходного напряжения инвертора. В описанном примере варианта осуществления синхронный трехимпульсный несущий сигнал используется в качестве синхронного несущего сигнала. Тем не менее, вместо этого может быть пригоден синхронный пятиимпульсный несущий сигнал и т.п. Дополнительно, также можно подготавливать множество синхронных несущих сигналов и выполнять переключение по мере необходимости.
Коэффициент PMFM в уравнениях (13)-(15) является амплитудой команды управления напряжением, полученной путем умножения коэффициента PMF модуляции на выходной сигнал из таблицы 54 регулирующих коэффициентов усилений в умножителе 53. Таблица 54 регулирующих коэффициентов усилений служит для коррекции разности соотношения выходного напряжения VM инвертора с коэффициентом PMF модуляции между асинхронным импульсным режимом и синхронным трехимпульсным режимом. Ее общий смысл описан ниже.
Максимальное напряжение (т.е. среднеквадратическое значение), которое может выводиться посредством инвертора, составляет 0,612*EFC в асинхронном импульсном режиме, при этом оно составляет 0,7797*EFC в синхронном трехимпульсном режиме. Таким образом, отношение выходного напряжения инвертора к коэффициенту PMF модуляции в асинхронном импульсном режиме должно составлять 1/1,274 по сравнению с этим отношением в синхронном трехимпульсном режиме. Чтобы исключить разность, в асинхронном импульсном режиме, коэффициент PMF модуляции умножается на 1,274 и вводится в вышеуказанный арифметический модуль 55 команд управления напряжением как амплитуда PMFM команды управления напряжением. Строго говоря, отношение выходного напряжения инвертора к коэффициенту PMF модуляции является нелинейным. Соотношение может указываться с учетом таблицы.
Затем команда Vu* управления напряжением U-фазы, команда Vv* управления напряжением V-фазы и команда Vw* управления напряжением W-фазы сравниваются с несущим сигналом CAL по величине в модулях 61-63 сравнения. Далее, формируются X, Y и Z соответственно через стробирующие сигналы U, В, W и инвертирующие схемы 64-66. Несущий сигнал CAL - это сигнал, выбираемый посредством модуля 60 обработки переключения импульсных режимов с помощью переключателя 59 из асинхронного несущего сигнала A, сформированного посредством модуля 57 формирования асинхронных несущих сигналов, синхронного трехимпульсного сигнала B, формированного посредством модуля 58 формирования синхронных трехимпульсных несущих сигналов, и нулевого значения C, которое должно выбираться в одноимпульсном режиме. Значения асинхронного несущего сигнала A и синхронного трехимпульсного несущего сигнала B соответственно варьируются от -1 до 1 с нулем в качестве центра.
Модуль 60 обработки переключения импульсных режимов выполнен с возможностью выбирать асинхронный импульсный режим, когда коэффициент PMF модуляции составляет менее 0,785, выбирать синхронный импульсный режим, когда коэффициент PMF модуляции составляет 0,785 и более, но менее 1,0, и выбирать одноимпульсный режим, когда коэффициент модуляции составляет 1,0 и более.
Далее описана конфигурация модуля 100A компенсации дисбаланса токов электродвигателя согласно варианту осуществления. На фиг.3 показан пример модуля 100A компенсации дисбаланса токов электродвигателя согласно первому варианту осуществления изобретения. Как проиллюстрировано на фиг.3, трехфазные токи iu, iv, iw, детектируемые соответственно посредством детекторов 3, 4, 5 тока, вводятся в модуль 100A компенсации дисбаланса токов электродвигателя. Ненужные частотные составляющие, содержащиеся в трехфазных токах iu, iv, iw, исключаются соответственно посредством фильтров 101U-101W нижних частот (в дальнейшем в этом документе, указываемых как LPF). Затем, после инвертирования по полярности соответственно посредством усилений 102U-102W, полученные сигналы вводятся соответственно в пропорционально-интегральные элементы 103U-103W. Выходные сигналы с пропорционально-интегральных элементов 103U-103W выводятся как величины vudc, vvdc, vwdc компенсации дисбаланса токов электродвигателя соответствующих фаз.
При вышеуказанной конфигурации становится возможным компенсировать дисбаланс тока электродвигателя, вызываемый посредством отклонения от истинного значения, содержащегося в выходном сигнале кругового датчика 7 положения, являющегося детектором положения, посредством отклонения, содержащегося в команде управления выходным напряжением инвертора, посредством неравномерности падения напряжения включения для переключающих элементов, составляющих инвертор 2, посредством варьирования корреляции полного сопротивления электродвигателя 6 и т.п. Соответственно, становится возможным обеспечить устройство 200 управления электродвигателя переменного тока, способное предотвращать пульсации крутящего момента и повреждения электродвигателя 6.
Далее описаны формы сигналов в одноимпульсном режиме, когда применяется первый вариант осуществления изобретения. Фиг.4-1 является примером форм сигналов токов электродвигателя в случае, если компенсация дисбаланса токов электродвигателя не выполняется. Фиг.4-2 является примером форм сигналов токов электродвигателя согласно первому варианту осуществления изобретения в случае, если компенсация дисбаланса токов электродвигателя выполняется. Как проиллюстрировано на фиг.4-1, когда компенсация дисбаланса токов электродвигателя не выполняется, как ток iu U-фазы, так и ток iv V-фазы смещаются к отрицательной стороне на порядка 10 A. Между тем, ток iw W-фазы смещается к положительной стороне на порядка 10 A. Дополнительно, крутящий момент T колеблется на частоте, идентичной частоте тока электродвигателя между 350 Нм и 500 Нм в сравнении с командой T* управления крутящим моментом в 425 Нм. Как проиллюстрировано на фиг.4-2, когда компенсация дисбаланса токов электродвигателя выполняется, пульсация частотного компонента тока электродвигателя крутящего момента T превосходно подавляется при том, что подавляется дисбаланс токов соответствующих фаз.
Второй вариант осуществления
На фиг.5 показан структурный пример модуля 100B компенсации дисбаланса токов электродвигателя согласно второму варианту осуществления изобретения. Поскольку второй вариант осуществления основан на первом варианте осуществления, далее описаны только части, отличающиеся от конфигурации первого варианта осуществления, тогда как описание для частей, имеющих конфигурацию, идентичную первому варианту осуществления, не повторяется. По сравнению с первым вариантом осуществления, как показано на фиг.5, токи iu, iv двух фаз из трехфазных токов iu, iv, iw, детектируемых соответственно посредством детекторов 3, 4, 5 тока, вводятся в модуль 100B компенсации дисбаланса токов электродвигателя. Затем ненужные частотные составляющие исключаются соответственно посредством LPF 101U, 101V. Дополнительно, после того как полярность инвертирована соответственно посредством усилений 102U, 102V, выполняется ввод в пропорционально-интегральные элементы 103U, 103V. Выходные сигналы из пропорционально-интегральных элементов 103U, 103V выводятся как величины vudc, vvdc компенсации дисбаланса токов электродвигателя соответствующих фаз. Величина vwdc компенсации дисбаланса токов электродвигателя оставшейся W-фазы вычисляется и выводится посредством использования модуля 104 вычитания с помощью уравнения vwdc=-vudc-vvdc.
На фиг.5 токи iu, iv двух фаз вводятся среди трехфазных токов iu, iv, iw, детектируемых соответственно посредством детекторов 3, 4, 5 тока. Тем не менее, также можно вводить другие две фазы (например, iv и iw). В этом случае величины vvdc, vwdc дисбаланса токов электродвигателя V-фазы и W-фазы вычисляются из токов iv, iw двух фаз соответственно посредством LPF 101, усиления 102 и пропорционально-интегрального элемента 103. Величина vudc компенсации дисбаланса токов электродвигателя оставшейся U-фазы вычисляется и выводится с помощью уравнения vudc=-vvdc-vwdc. Таким образом, величина компенсации дисбаланса токов электродвигателя помимо введенных двух фаз получается на основе того, что сумма величин компенсации дисбаланса токов электродвигателя трех фаз (т.е. vudc+vvdc+vwdc) становится нулевой.
При вышеуказанной конфигурации становится возможным компенсировать дисбаланс тока электродвигателя, вызываемый посредством отклонения от истинного значения, содержащегося в выходном сигнале кругового датчика 7 положения, являющегося детектором положения, посредством отклонения, содержащегося в команде управления выходным напряжением инвертора, посредством неравномерности падения напряжения включения для переключающих элементов, формирующих инвертор 2, посредством варьирования корреляции полного сопротивления электродвигателя и т.п. Соответственно, становится возможным обеспечить устройство управления электродвигателя переменного тока, способное предотвращать пульсации крутящего момента и повреждения электродвигателя.
Третий вариант осуществления
Далее описана конфигурация третьего варианта осуществления изобретения. Поскольку третий вариант осуществления основан на первом варианте осуществления, только части, отличающиеся от конфигурации первого варианта осуществления, описаны далее, тогда как описание для частей, имеющих конфигурацию, идентичную первому варианту осуществления, не повторяется. На фиг.6 показан пример выполнения модуля 100C компенсации дисбаланса токов электродвигателя согласно третьему варианту осуществления изобретения. По сравнению с первым вариантом осуществления, как проиллюстрировано на фиг.6, токи iu, iv двух фаз из трехфазных токов iu, iv, iw, детектируемых соответственно посредством детекторов 3, 4, 5 тока, вводятся в модуль 100C компенсации дисбаланса токов электродвигателя. Затем ненужные составляющие исключаются соответственно посредством LPF 101U, 101V. Дополнительно, после того как полярность инвертирована соответственно посредством усилений 102U, 102V, выполняется ввод в пропорционально-интегральные элементы 103U, 103V. Выходные сигналы с пропорционально-интегральных элементов 103U, 103V выводятся как величины vudc, vvdc компенсации дисбаланса токов электродвигателя соответствующих фаз. Величина vwdc компенсации дисбаланса токов электродвигателя оставшейся W-фазы фиксируется и выводится как нулевая.
На фиг.6 токи iu, iv двух фаз вводятся из трехфазных токов iu, iv, iw, детектируемых посредством детекторов 3, 4, 5 тока соответственно. Тем не менее, также можно вводить другие две фазы (например, iv и iw).
Таким образом, предпочтительно фиксировать величину компенсации дисбаланса токов электродвигателя произвольной одной фазы как нулевую и получать только величины компенсации дисбаланса токов электродвигателя оставшихся двух фаз из детектированных токов двух фаз. Например, как описано выше, величина vudc компенсации дисбаланса токов электродвигателя U-фазы может выводиться как нулевая в то время, когда величины vvdc, vwdc дисбаланса токов электродвигателя V-фазы и W-фазы выводятся через LPF 101, усиление 102 и пропорционально-интегральный элемент 103.
При вышеуказанной конфигурации становится возможным компенсировать дисбаланс тока электродвигателя, вызываемый посредством отклонения от истинного значения, содержащегося в выходном сигнале кругового датчика 7 положения, являющегося детектором положения, посредством отклонения, содержащегося в команде управления выходным напряжением инвертора, посредством неравномерности падения напряжения включения для переключающих элементов, формирующих инвертор 2, посредством варьирования корреляции полного сопротивления электродвигателя и т.п. Соответственно, становится возможным обеспечить устройство управления электродвигателя переменного тока, способное предотвращать пульсации крутящего момента и повреждения электродвигателя.
По сравнению с первым вариантом осуществления конфигурации второго варианта осуществления и третьего варианта осуществления имеют следующие признаки. В конфигурации первого варианта осуществления величины vudc, vvdc, vwdc компенсации дисбаланса токов электродвигателя трех фаз получаются отдельно из значений iu, iv, iw детектирования тока соответствующих фаз. Тем не менее, в случае если составляющая смещения накладывается на значения iu, iv, iw детектирования тока детекторов 3, 4, 5 тока, может быть рассмотрено следующее явление.
Здесь, когда значения детектирования тока обрабатываются так, чтобы не содержать составляющую смещения в значениях iu, iv, iw детектирования тока детектора 3, 4, 5 тока, проблема, описанная ниже, не возникает. Тем не менее, составляющую смещения, в общем, трудно полностью исключать.
В качестве примера предположим, что положительное смещение накладывается на все детектированные значения детекторов 3, 4, 5 тока, а именно, что нуль-фазовая составляющая существует в значениях детектирования тока. В этом случае все величины vudc, vvdc, vwdc компенсации дисбаланса токов электродвигателя трех фаз, вычисляемые в процедуре первого варианта осуществления, становятся отрицательными величинами. Соответственно, отрицательные величины vudc, vvdc, vwdc компенсации дисбаланса токов электродвигателя трех фаз соответственно прибавляются к команде Vu** управления базовым напряжением U-фазы, команде Vv** управления базовым напряжением V-фазы и команде Vw** управления базовым напряжением W-фазы. Таким образом, команда Vu* управления напряжением U-фазы, команда Vv* управления напряжением V-фазы и команда Vw* управления напряжением W-фазы накладываются, соответственно, с отрицательной нуль-фазовой составляющей. Здесь, поскольку варьирование в напряжении между выходными линиями инвертора 2 не возникает, даже когда нуль-фазовая составляющая накладывается на команду управления напряжением, варьирование в токе электродвигателя не возникает. Дополнительно, поскольку вывод инвертора 2 сформирован как имеющий трехфазный трехпроводной тип, нулевой фазный ток фактически не формируется. Соответственно, нуль-фазовая составляющая, существующая в значениях iu, iv, iw детектирования тока значений 3, 4, 5 детектирования тока, не может быть компенсирована с тем, чтобы исключаться, и остается. Следовательно, составляющие смещения, содержащиеся в значениях iu, iv, iw детектирования тока, по-прежнему усиливаются посредством интегральных элементов в пропорционально-интегральных элементах 103. Затем все величины vudc, vvdc, vwdc компенсации дисбаланса токов электродвигателя увеличиваются в отрицательном направлении и расходятся во времени. В этом состоянии соответствующая компенсация дисбаланса токов электродвигателя не может быть выполнена, и дополнительно, имеется вероятность того, что обычное приведение в действие электродвигателя затрудняется.
Конфигурации второго и третьего вариантов осуществления имеют отличия в том, что величины vudc, vvdc, vwdc компенсации дисбаланса токов электродвигателя трех фаз не получаются из токов iu, iv, iw соответствующих фаз. В частности, величина компенсации дисбаланса токов электродвигателя любой из фаз определяется из величин компенсации дисбаланса токов электродвигателя оставшихся двух фаз, или величина фиксируется так, чтобы быть нулевой.
При конфигурациях, описанных во втором и третьем вариантах осуществления, явление увеличения и расхождения величин vudc, vvdc, vwdc компенсации дисбаланса токов электродвигателя трех фаз может исключаться даже в случае, если составляющая смещения накладывается соответственно на значения iu, iv, iw детектирования тока детекторов 3, 4, 5 тока. Соответственно, становится возможным надлежащим образом компенсировать дисбаланс токов электродвигателя, так что обычное приведение в действие электродвигателя становится возможным.
Дополнительно, поскольку только токи произвольных двух фаз должны детектироваться из трех фаз выхода инвертора, число необходимых детекторов тока может составлять только два. Помимо этого арифметика модулей 100B, 100C компенсации дисбаланса токов электродвигателя упрощается, и устройство 200 управления электродвигателя переменного тока может быть уменьшено по размеру и весу.
Четвертый вариант осуществления
Далее описана конфигурация четвертого варианта осуществления изобретения. Поскольку четвертый вариант осуществления основан на первом варианте осуществления, описаны далее только части, отличающиеся от конфигурации первого варианта осуществления, тогда как описание для частей, имеющих конфигурацию, идентичную первому варианту осуществления, не повторяется. Фиг.7 является видом, иллюстрирующим структурный пример модуля 100D компенсации дисбаланса токов электродвигателя согласно четвертому варианту осуществления изобретения. Как проиллюстрировано на фиг.7, трехфазные токи iu, iv, iw, детектируемые соответственно посредством детекторов 3, 4, 5 тока, вводятся в модуль 100D компенсации дисбаланса токов электродвигателя. Ненужные составляющие исключаются из трехфазных токов iu, iv, iw соответственно посредством LPF 101U-101W. Затем, после того как полярность инвертирована соответственно посредством усилений 102U-102W, выполняется ввод в пропорционально-интегральные элементы 103U-103W. Сумма выводов пропорционально-интегральных элементов 103U-103W получается посредством сумматора 105. Величина zh коррекции нуль-фазовой составляющей - это значение, полученное посредством умножения суммы на коэффициент усиления при усилении 102. Значения, полученные посредством вычитания значения zh коррекции нуль-фазовой составляющей, вычитаются соответственно из выходных сигналов пропорционально-интегральных элементов 103U-103W в модулях 106U-106W вычитания. Значения, полученные таким образом, определяются как величины компенсации дисбаланса токов электродвигателя трех фаз vudc, vvdc, vwdc. Здесь значение усиления 102 предпочтительно должно составлять 1/3.
При вышеуказанной конфигурации становится возможным компенсировать дисбаланс тока электродвигателя, вызываемый посредством отклонения от истинного значения, содержащегося в выходном сигнале кругового датчика 7 положения, являющегося детектором положения, посредством отклонения, содержащегося в команде управления выходным напряжением инвертора, посредством неравномерности падения напряжения включения для переключающих элементов, формирующих инвертор 2, посредством варьирования корреляции полного сопротивления электродвигателя 6 и т.п. Соответственно, становится возможным обеспечить устройство 200 управления электродвигателя переменного тока, способное предотвращать пульсации крутящего момента и повреждения электродвигателя 6.
Дополнительно, явление увеличения в положительном или отрицательном направлении и расхождения величин vudc, vvdc, vwdc компенсации дисбаланса токов электродвигателя трех фаз может исключаться даже в случае, если вышеуказанная составляющая смещения накладывается соответственно на значения iu, iv, iw детектирования тока детекторов 3, 4, 5 тока. Соответственно, становится возможным надлежащим образом компенсировать дисбаланс токов электродвигателя, так что обычное приведение в действие электродвигателя 6 становится возможным.
Конфигурация четвертого варианта осуществления является немного более сложной, чем конфигурации второго и третьего вариантов осуществления. Тем не менее, четвертый вариант осуществления является отличительным в том, что характеристика компенсации дисбаланса тока электродвигателя (т.е. эффект подавления дисбаланса токов и эффект подавления колебаний крутящего момента) превосходит характеристику компенсации дисбаланса конфигураций второго и третьего вариантов осуществления.
Далее описаны значимые моменты, которые являются общими для вариантов осуществления с первого по четвертый.
Примечание 1
Имеется опасность того, что колебание тока электродвигателя 6 возникает вследствие помех между величинами vudc, vvdc, vwdc компенсации дисбаланса токов электродвигателя, которые исходят из модулей 100A-100D компенсации дисбаланса токов электродвигателя и выходных сигналов устройства управления током, содержащего модуль 20 управления током d-оси и модуль 23 управления током q-оси. Соответственно, предпочтительно сохранять интервал между реакцией системы компенсации дисбаланса токов электродвигателя и реакцией системы управления током таким, чтобы они не были согласованными. Здесь реакция системы компенсации дисбаланса токов электродвигателя обозначает реакцию от входных сигналов модулей 100A-100D компенсации дисбаланса токов электродвигателя до токов iu, iv, iw электродвигателя. Реакция системы управления током обозначает реакцию из ввода модуля 20 управления током d-оси и модуля 23 управления током q-оси до токов Iu, Iv, Iw электродвигателя. В общем, предпочтительно выполнять реакцию системы компенсации дисбаланса токов электродвигателя так, чтобы она была медленнее реакции системы управления током. Дополнительно, для простоты выполнения, компенсация дисбаланса токов электродвигателя может выполняться в то время, когда выходной сигнал системы управления током, содержащей модуль 20 управления током d-оси и модуль 23 управления током q-оси, задается равным нулю в качестве прекращения его вычисления, или выходной сигнал должен быть постоянным фиксированным значением. Таким образом, величина компенсации дисбаланса токов электродвигателя выполнена с возможностью регулирования, в связи с состоянием системы управления по току, оперативной степени, включающей в том числе то, выполняется или нет компенсация.
Примечание 2
LPF 101U-101W служат просто для извлечения низкочастотных составляющих, включающих в себя постоянный ток, из составляющих, содержащихся в токах iu, iv, iw электродвигателя. Предпочтительно задавать частоту отсечки равной нескольким Гц или ниже. Здесь предпочтительно, чтобы частота отсечки LPF 101U-101W определялась в связи с выходной частотой инвертора FINV для выполнения компенсации дисбаланса токов электродвигателя. Таким образом, полоса частот для выходной частоты инвертора FINV для выполнения компенсации дисбаланса токов электродвигателя задается так, чтобы превышать частоту отсечки LPF 101U-101W. Например, когда частота отсечки LPF 101U-101W задается равной 2 кГц, предпочтительно выполнять компенсацию дисбаланса токов электродвигателя в диапазоне, в котором выходная частота инвертора FINV составляет 10 кГц или выше. В этом случае могут предотвращаться чрезмерная базовая составляющая тока электродвигателя, содержащаяся в величине компенсации дисбаланса токов электродвигателя, и чрезмерная величина компенсации дисбаланса токов электродвигателя.
Примечание 3
Предпочтительно, чтобы время начала или прекращения выполнения компенсации дисбаланса токов электродвигателя было связано с выходной частотой инвертора FINV, коэффициентом PMF модуляции или импульсным режимом. Причина описана ниже. В области синхронного режима или одноимпульсного режима число импульсов, включенных в полупериод выходного напряжения инвертора 2, становится небольшим. Соответственно, как описано выше, необходимо снижать реакцию системы управления током, которая сформирована из модуля 20 управления током d-оси и модуля 23 управления током q-оси, или переключаться так, чтобы прекращать управление системой управления током или регулировать только фазу напряжения, приложенного к электродвигателю. В этом случае эффект подавления трехфазного дисбаланса тока электродвигателя посредством системы управления током снижается или гасится. Таким образом, также возможно то, что компенсация дисбаланса токов электродвигателя по изобретению выполняется только в области синхронного режима или одноимпульсного режима. Соответственно, время начала или прекращения выполнения компенсации дисбаланса токов электродвигателя может быть определено на основе импульсного режима инвертора 2. В этой связи, вместо базирования на импульсном режиме аналогичный эффект может быть получен посредством определения на основе величин, связанных с синхронизацией переключения импульсного режима, которыми являются коэффициент PMF модуляции, выходная частота инвертора FINV, скорость электромобиля и т.п.
Примечание 4
В примененном примере изобретения, как описано выше, электродвигатель 6 приводится в действие при одновременном выполнении переключения между множеством импульсных режимов в соответствии с состоянием приведения электродвигателя 6. В этом случае ширина импульса и положение импульса, формирующие напряжение между выходными линиями инвертора 2, варьируются в соответствии с импульсным режимом. Таким образом, величина дисбаланса тока электродвигателя должна варьироваться в соответствии с импульсным режимом. После того как дисбаланс тока электродвигателя сформирован, модули 100A-100D компенсации дисбаланса токов электродвигателя формируют величины vudc, vvdc, vwdc компенсации дисбаланса токов электродвигателя способом с обратной связью и выполняют операцию компенсации, чтобы подавлять дисбаланс тока электродвигателя, при использовании вышеуказанного LPF 101, усиления 102U-102W, пропорционально-интегральных элементов 103U-103W на основе тока, детектируемого посредством детекторов 3, 4, 5 тока.
Тем не менее, в момент после переключения импульсного режима выходные сигналы пропорционально-интегральных элементов 103U-103W (т.е. величины компенсации дисбаланса токов электродвигателя) не являются оптимальными значениями компенсации в импульсном режиме после переключения. Соответственно, проходит определенное переходное время до тех пор, пока величины vudc, vvdc, vwdc компенсации дисбаланса токов электродвигателя не определены статически. Таким образом, дисбаланс тока электродвигателя возникает до тех пор, пока величины vudc, vvdc, vwdc компенсации дисбаланса токов электродвигателя не определены статически как оптимальные значения. В качестве мер против такого явления может рассматриваться сохранение величины дисбаланса тока электродвигателя в каждом из множества из импульсных режимов в ходе работы электродвигателя 6 посредством устройства 200 управления электродвигателя переменного тока и вычисление заранее и получение прогнозирующих величин компенсации дисбаланса токов электродвигателя для компенсации. Затем в ходе следующей операции электродвигателя 6 прогнозирующие величины компенсации дисбаланса токов электродвигателя, которые заранее вычислены и получены в соответствии с каждым из вышеуказанных импульсных режимов, должны быть суммированы с выходными сигналами пропорционально-интегральных элементов 103U-103W способом с прямой связью. Соответственно, разность величины компенсации дисбаланса токов электродвигателя между моментами до переключения и после переключения импульсного режима компенсируется способом с прямой связью, так что только величина отклонения, содержащегося в прогнозирующих величинах компенсации дисбаланса токов электродвигателя, компенсируется способом с обратной связью с использованием пропорционально-интегральных элементов 103U-103W. Следовательно, возникновение кратковременного дисбаланса тока электродвигателя после переключения импульсного режима может подавляться до минимума. Здесь в случае если работа переключающего элемента инвертора 2 прекращена, предпочтительно, чтобы выходные сигналы вычислений модулей 100A-100D компенсации дисбаланса токов электродвигателя прекращались. Соответственно, можно не допускать расхождения величин vudc, vvdc, vwdc компенсации дисбаланса токов электродвигателя, вызываемых посредством составляющих смещения, содержащихся в выходных сигналах детекторов 3, 4, 5 тока.
С помощью модулей 100A-100D компенсации дисбаланса токов электродвигателя, описанных в вышеуказанных вариантах осуществления с первого по четвертый, в устройстве управления электродвигателя переменного тока, работающего в синхронном режиме и одноимпульсном режиме, становится возможным подавлять дисбаланс тока электродвигателя, вызываемый посредством отклонения от истинного значения, содержащегося в выходном сигнале кругового датчика 7 положения, являющегося детектором положения, посредством отклонения, содержащегося в команде управления выходным напряжением инвертора, посредством неравномерности падения напряжения включения для переключающих элементов, посредством варьирования корреляции полного сопротивления электродвигателя 6 и т.п. Соответственно, становится возможным предоставлять устройство 200 управления электродвигателя переменного тока, способное предотвращать пульсации крутящего момента и повреждения электродвигателя 6.
В примерной конфигурации вышеприведенного описания трехфазная команда управления напряжением регулируется в соответствии с величиной компенсации дисбаланса токов электродвигателя. Тем не менее, без ограничения этой конфигурацией, могут применяться другие способы при условии, что стробирующие сигналы U, В, W, X, Y, Z, являющиеся сигналами широтно-импульсной модуляции, могут прямо или косвенно регулироваться в соответствии с величиной компенсации дисбаланса токов электродвигателя. Например, также можно применять способ, чтобы непосредственно корректировать синхронизацию переключения в соответствии с величиной компенсации дисбаланса токов электродвигателя.
В описании вышеуказанных вариантов осуществления устройство управления электродвигателя переменного тока предназначено для управления синхронным электродвигателем с постоянными магнитами. Тем не менее, принцип изобретения может применяться к устройству управления электродвигателя переменного тока, чтобы управлять приведением в действие других типов электродвигателей.
Конфигурации, описанные в вышеуказанных вариантах осуществления, являются примерами изобретения. Также можно комбинировать их с отдельной известной технологией. Дополнительно, разумеется, что их часть может быть сокращена или модифицироваться в рамках объема изобретения.
Дополнительно, в этом подробном описании изобретение описано с учетом применения к устройству управления электродвигателя переменного тока для электромобиля. Тем не менее, без ограничения этой заявкой, разумеется, что изобретение может применяться к различным областям, таким как электрические автомобили и грузоподъемники.
Промышленная применимость
Изобретение применимо к устройству управления электродвигателя переменного тока для приведения в движение электромобиля, в частности, применимо к устройству управления, подходящему для управления синхронным электродвигателем с постоянными магнитами.
Пояснение номеров ссылок
1 - конденсатор
2 - инвертор
3, 4, 5 - детектор тока
6 - электродвигатель
7 - круговой датчик положения
8 - детектор напряжения
10 - модуль формирования команд управления током
11 - модуль формирования команд управления базовым током d-оси
14 - сумматор
15 - модуль формирования команд управления током q-оси
20 - модуль управления током d-оси
21 - арифметический модуль развязки q-оси
22 - арифметический модуль развязки q-оси
23 - модуль управления током q-оси
30 - арифметический модуль коэффициентов модуляции
40 - арифметический модуль управляющих фазовых углов
50 - модуль формирования команд управления напряжением/ШИМ-сигналов
53 - умножитель
54 - таблица регулирующих коэффициентов усиления
55 - арифметический модуль команд управления напряжением
57 - модуль формирования асинхронных несущих сигналов
58 - модуль формирования синхронных трехимпульсных несущих
59 - переключатель
60 - модуль обработки переключения импульсных режимов
61-63 - компаратор
64-66 - инвертирующая схема
67-69 - сумматор
70 - арифметический модуль угловых частот инвертора
90 - модуль трехфазного преобразования координат d/q-осей
95 - арифметический модуль базовых фазовых углов
100A-100D - модуль компенсации дисбаланса токов электродвигателя
101U-101W - фильтр нижних частот (LPF)
102U-102W - усиление
103U-103W - пропорциональный интегральный элемент
104 - модуль вычитания
105 - сумматор
106U-106W - модуль вычитания
200 - устройство управления электродвигателя переменного тока
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ | 2015 |
|
RU2682664C1 |
| ВЕКТОРНЫЙ РЕГУЛЯТОР ДЛЯ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2006 |
|
RU2407140C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ ДЛЯ ВОЗБУЖДЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2008 |
|
RU2463699C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2008 |
|
RU2442274C1 |
| КОНТРОЛЛЕР ЭЛЕКТРОДВИГАТЕЛЯ | 2007 |
|
RU2432663C1 |
| УСТРОЙСТВО И СПОСОБ РЕГУЛИРОВАНИЯ СИСТЕМЫ ПРИВОДА ОТ ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2391767C2 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2009 |
|
RU2481693C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ЭЛЕКТРИЧЕСКОЙ ВРАЩАЮЩЕЙСЯ МАШИНЫ | 2009 |
|
RU2470453C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ | 2007 |
|
RU2419954C1 |
| ПРИВОДНОЙ КОНТРОЛЛЕР ДЛЯ ЭЛЕКТРОДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2449445C1 |





Изобретение относится к области электротехники и может быть использовано для приведения в движение автомобиля. Устройство управления электродвигателем переменного тока включает трехфазный инвертор (2), который подключен к источнику (1) постоянного тока и выводит трехфазные переменные токи на электродвигатель (6) переменного тока, детектор (3, 4, 5) тока, который детектирует ток электродвигателя (6) переменного тока, модуль (50) формирования команд управления напряжением/ШИМ-сигналов, который вычисляет команду управления выходным напряжением инвертора (2) на основе сигнала из детектора (3, 4, 5) тока и формирует сигнал широтно-импульсной модуляции, чтобы управлять переключающим элементом, расположенным в инверторе (2), на основе команды управления выходным напряжением, и модуль (100А) компенсации дисбаланса токов электродвигателя, который формирует величины компенсации дисбаланса токов электродвигателя соответствующих фаз на основе токов, по меньшей мере, любых двух из фаз из токов электродвигателя (6) переменного тока и задает величину компенсации дисбаланса токов электродвигателя оставшейся одной фазы равной нулю, и сигнал широтно-импульсной модуляции двух фаз прямо или косвенно регулируется в модуле (50) формирования команд управления напряжением/ШИМ-сигналов на основе величин компенсации дисбаланса токов электродвигателя в соответствии с режимом возбуждения инвертора (2). 7 н. и 6 з.п. ф-лы, 8 ил.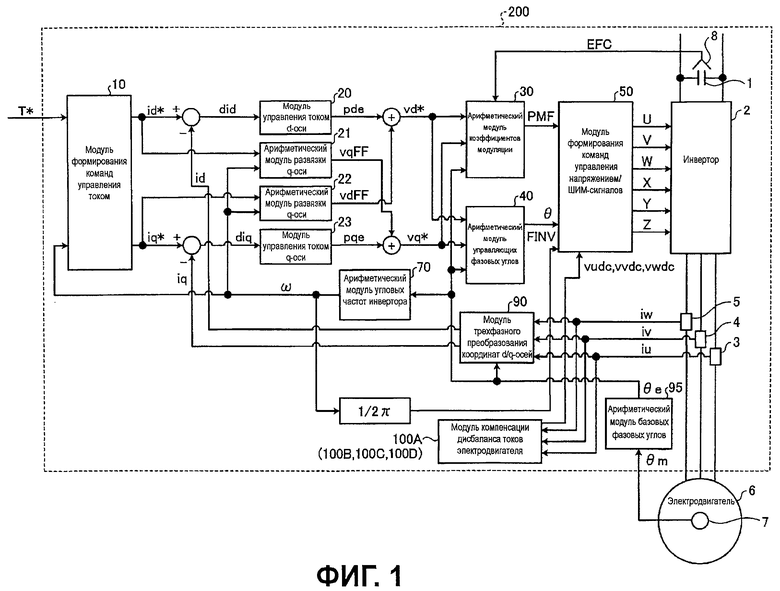
1. Устройство (200) управления электродвигателя (6) переменного тока, содержащее:
инвертор (2), который подключен к источнику постоянного тока и выводит трехфазные переменные токи произвольной частоты и произвольное напряжение на электродвигатель (6) переменного тока;
детектор (3, 4, 5) тока, который детектирует ток электродвигателя (6) переменного тока;
модуль (50) формирования команд управления напряжением/ШИМ-сигналов, который вычисляет команду управления выходным напряжением инвертора (2) на основе сигнала из детектора (3, 4, 5) тока и формирует сигнал широтно-импульсной модуляции, чтобы управлять переключающим элементом, который расположен в инверторе (2), на основе команды управления выходным напряжением; и
модуль (100А, 100В, 100С, 100D) компенсации дисбаланса токов электродвигателя, который формирует величины компенсации дисбаланса токов электродвигателя соответствующих фаз на основе токов, по меньшей мере, любых двух из фаз из токов, детектируемых посредством детектора тока, и задает величину компенсации дисбаланса токов электродвигателя оставшейся одной фазы, равной нулю, при этом:
модуль (50) формирования команд управления напряжением/ШИМ-сигналов прямо или косвенно регулирует сигнал широтно-импульсной модуляции двух фаз на основе величин компенсации дисбаланса токов.
2. Устройство (200) управления электродвигателя (6) переменного тока, содержащее:
инвертор (2), который подключен к источнику постоянного тока и выводит трехфазные переменные токи произвольной частоты и произвольное напряжение на электродвигатель (6) переменного тока;
детектор (3, 4, 5) тока, который детектирует ток электродвигателя (6) переменного тока;
модуль (50) формирования команд управления напряжением/ШИМ-сигналов, который вычисляет команду управления выходным напряжением инвертора (2) на основе сигнала из детектора (3, 4, 5) тока и формирует сигнал широтно-импульсной модуляции, чтобы управлять переключающим элементом, который расположен в инверторе (2), на основе команды управления выходным напряжением; и
модуль (100А, 100В, 100С, 100D) компенсации дисбаланса токов электродвигателя, сконфигурированный для формирования базовых величин из величин компенсации дисбаланса токов электродвигателя соответствующих фаз на основе токов, детектируемых посредством детектора тока, и формирования величин компенсации дисбаланса токов электродвигателя соответствующих фаз, полученных посредством вычитания величины, которая основана на сумме базовых величин из величин компенсации дисбаланса токов электродвигателя, соответственно, из базовых величин из величин компенсации дисбаланса токов трех фаз, при этом:
модуль (50) формирования команд управления напряжением/ШИМ-сигналов прямо или косвенно регулирует сигналы широтно-импульсной модуляции трех фаз на основе величин компенсации дисбаланса токов.
3. Устройство (200) управления электродвигателя (6) переменного тока по п.1 или 2, в котором:
модуль (50) формирования команд управления напряжением/ШИМ-сигналов регулирует команды управления выходным напряжением на основе величин компенсации дисбаланса токов.
4. Устройство (200) управления электродвигателя (6) переменного тока по п.1 или 2, в котором:
степень регулирования или то, как выполняется прямое или косвенное регулирование сигналов широтно-импульсной модуляции на основе величины компенсации дисбаланса токов, определяется в связи с любым из состояния импульсного режима инвертора (2), выходной частоты инвертора (2) и коэффициента модуляции.
5. Устройство (200) управления электродвигателя (6) переменного тока, содержащее:
инвертор (2), который подключен к источнику постоянного тока и выводит трехфазные переменные токи произвольной частоты и произвольное напряжение на электродвигатель (6) переменного тока;
детектор (3, 4, 5) тока, который детектирует ток электродвигателя (6) переменного тока;
модуль (50) формирования команд управления напряжением/ШИМ-сигналов, который вычисляет команду управления выходным напряжением инвертора (2) на основе сигнала из детектора (3, 4, 5) тока и формирует сигнал широтно-импульсной модуляции, чтобы управлять переключающим элементом, который размещается в инверторе (2), на основе команды управления выходным напряжением; и
модуль (100А, 100В, 100С, 100D) компенсации дисбаланса токов электродвигателя, который формирует величину компенсации дисбаланса токов электродвигателя на основе тока, детектируемого посредством детектора тока, при этом:
величина компенсации дисбаланса токов сконфигурирована для выведения в случае, если рабочий импульсный режим инвертора является синхронным импульсным режимом или одноимпульсным режимом, и
модуль формирования команд управления напряжением/ШИМ-сигналов прямо или косвенно регулирует сигнал широтно-импульсной модуляции на основе величины компенсации дисбаланса токов.
6. Устройство (200) управления электродвигателя (6) переменного тока, содержащее:
инвертор (2), который подключен к источнику постоянного тока и выводит трехфазные переменные токи произвольной частоты и произвольное напряжение в электродвигатель (6) переменного тока;
детектор (3, 4, 5) тока, который детектирует ток электродвигателя (6) переменного тока;
модуль (50) формирования команд управления напряжением/ШИМ-сигналов, который вычисляет команду управления выходным напряжением инвертора (2) на основе сигнала из детектора (3, 4, 5) тока и формирует сигнал широтно-импульсной модуляции, чтобы управлять переключающим элементом, который расположен в инверторе (2), на основе команды управления выходным напряжением; и
модуль (100А, 100В, 100С, 100D) компенсации дисбаланса токов электродвигателя, который формирует величину компенсации дисбаланса токов электродвигателя на основе тока, детектируемого посредством детектора тока, при этом:
в случае, если система управления током, которая регулирует величину напряжения, приложенного к электродвигателю (6) переменного тока, дополнительно включена для разделения тока, детектируемого посредством детектора (3, 4, 5) тока, на ток d-оси и ток q-оси по двум координатам по ортогональным осям, которые имеют d-ось и q-ось и вращаются синхронно с частотой выходного напряжения инвертора (2), и согласования тока d-оси и тока q-оси с соответствующими значениями команд управления, величина компенсации дисбаланса токов выводится в модуль (50) формирования команд управления напряжением/ШИМ-сигналов в случае снижения реакции системы управления током, в случае переключения для прекращения управления системой управления током или в случае регулирования только фазы напряжения, приложенного к электродвигателю, и
модуль формирования команд управления напряжением/ШИМ-сигналов прямо или косвенно регулирует сигнал широтно-импульсной модуляции на основе величины компенсации дисбаланса токов.
7. Устройство (200) управления электродвигателя (6) переменного тока, содержащее:
инвертор (2), который подключен к источнику постоянного тока и выводит трехфазные переменные токи произвольной частоты и произвольное напряжение на электродвигатель (6) переменного тока;
детектор (3, 4, 5) тока, который детектирует ток электродвигателя (6) переменного тока;
модуль (50) формирования команд управления напряжением/ШИМ-сигналов, который вычисляет команду управления выходным напряжением инвертора (2) на основе сигнала из детектора (3, 4, 5) тока и формирует сигнал широтно-импульсной модуляции, чтобы управлять переключающим элементом, который расположен в инверторе (2), на основе команды управления выходным напряжением;
модуль (100А, 100В, 100С, 100D) компенсации дисбаланса токов электродвигателя, который формирует величину компенсации дисбаланса токов электродвигателя на основе тока, детектируемого посредством детектора тока; и
систему управления током, которая регулирует величину напряжения, приложенного к электродвигателю (6) переменного тока для разделения тока, детектируемого посредством детектора (3, 4, 5) тока, на ток d-оси и ток q-оси по двум координатам по ортогональным осям, которые имеют d-ось и q-ось и вращаются синхронно с частотой выходного напряжения инвертора (2), и согласования тока d-оси и тока q-оси с соответствующими значениями команд управления, при этом:
реакция системы компенсации дисбаланса токов электродвигателя, в которую включен модуль (100А, 100В, 100С, 100D) компенсации дисбаланса токов электродвигателя, и реакция системы управления током инвертора (2) задаются так, чтобы не быть взаимно согласованными, и модуль формирования команд управления напряжением/ШИМ-сигналов прямо или косвенно регулирует сигнал широтно-импульсной модуляции на основе величины компенсации дисбаланса токов.
8. Устройство (200) управления электродвигателя (6) переменного тока, содержащее:
инвертор (2), который подключен к источнику постоянного тока и выводит трехфазные переменные токи произвольной частоты и произвольное напряжение на электродвигатель (6) переменного тока;
детектор (3, 4, 5) тока, который детектирует ток электродвигателя (6) переменного тока;
модуль (50) формирования команд управления напряжением/ШИМ-сигналов, который вычисляет команду управления выходным напряжением инвертора (2) на основе сигнала из детектора (3, 4, 5) тока и формирует сигнал широтно-импульсной модуляции, чтобы управлять переключающим элементом, который расположен в инверторе (2), на основе команды управления выходным напряжением;
модуль (100А, 100В, 100С, 100D) компенсации дисбаланса токов электродвигателя, который формирует величину компенсации дисбаланса токов электродвигателя на основе тока, детектируемого посредством детектора тока; и
систему управления током, которая регулирует величину напряжения, приложенного к электродвигателю (6) переменного тока для разделения тока, детектируемого посредством детектора (3, 4, 5) тока, на ток d-оси и ток q-оси по двум координатам по ортогональным осям, которые имеют d-ось и q-ось и вращаются синхронно с частотой выходного напряжения инвертора (2), и согласования тока d-оси и тока q-оси с соответствующими значениями команд управления, при этом:
реакция системы компенсации дисбаланса токов электродвигателя, в которую включен модуль (100А, 100В, 100С, 100D) компенсации дисбаланса токов электродвигателя, задается так, чтобы быть медленнее реакции системы управления током инвертора (2), и
модуль формирования команд управления напряжением/ШИМ-сигналов прямо или косвенно регулирует сигнал широтно-импульсной модуляции на основе величины компенсации дисбаланса токов.
9. Устройство (200) управления электродвигателя (6) переменного тока по п.1 или 2, в котором:
величины компенсации дисбаланса токов вычисляются на основе значения низкочастотной составляющей от нескольких Гц или ниже, включающей в себя постоянный ток, который извлекается из значения детектирования тока детектора (3, 4, 5) тока.
10. Устройство (200) управления электродвигателя (6) переменного тока по п.1 или 2, в котором:
в случае если фильтр (101U, 101V, 101W) нижних частот дополнительно включен в качестве модуля для того, чтобы извлекать низкочастотную составляющую от нескольких Гц или ниже, включающую в себя постоянный ток, из значения детектирования тока детектора (3, 4, 5) тока, полоса частот выходной частоты инвертора (2), сигнал широтно-импульсной модуляции которой прямо или косвенно регулируется в соответствии с величинами компенсации дисбаланса токов, задается так, чтобы превышать частоту отсечки фильтра (101U, 101V, 101W) нижних частот.
11. Устройство (200) управления электродвигателя (6) переменного тока, содержащее:
инвертор (2), который подключен к источнику постоянного тока и выводит трехфазные переменные токи произвольной частоты и произвольное напряжение в электродвигатель (6) переменного тока;
детектор (3, 4, 5) тока, который детектирует ток электродвигателя (6) переменного тока;
модуль (50) формирования команд управления напряжением/ШИМ-сигналов, который вычисляет команду управления выходным напряжением инвертора (2) на основе сигнала от детектора (3, 4, 5) тока и формирует сигнал широтно-импульсной модуляции, чтобы управлять переключающим элементом, который расположен в инверторе (2), на основе команды управления выходным напряжением; и
модуль (100А, 100В, 100С, 100D) компенсации дисбаланса токов электродвигателя, который формирует величину компенсации дисбаланса токов электродвигателя на основе тока, детектируемого посредством детектора тока, при этом:
величина компенсации несбалансированной составляющей, включенной в ток электродвигателя переменного тока, определяется в качестве прогнозирующей величины компенсации дисбаланса токов электродвигателя, и модуль компенсации дисбаланса токов электродвигателя выводит величину компенсации дисбаланса токов, содержащую прогнозирующую величину компенсации дисбаланса токов, и
модуль формирования команд управления напряжением/ШИМ-сигналов прямо или косвенно регулирует сигнал широтно-импульсной модуляции на основе величины компенсации дисбаланса токов.
12. Устройство (200) управления электродвигателя (6) переменного тока по п.11, в котором:
величины компенсации дисбаланса токов вычисляются соответственно согласно множеству импульсных режимов.
13. Устройство (200) управления электродвигателя (6) переменного тока по п.1 или 2, в котором:
вывод вычислений модуля (100А, 100В, 100С, 100D) компенсации дисбаланса токов прекращается, когда прекращается работа переключающего элемента.
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТИ | 1998 |
|
RU2209502C2 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1997 |
|
RU2193814C2 |
| DE 19636784 A1, 13.03.1997 | |||
| US 4764712 A, 15.08.1982 | |||
| JP 2006340486 A, 14.12.2006 | |||
| JP 2004104898 A, 02.04.2004 | |||
| Устройство для формирования серий импульсов | 1986 |
|
SU1345321A1 |

