Изобретение относится к области машиностроения, а именно к устройствам, обеспечивающим линейное перемещение обрабатываемого изделия, и может быть использовано в высокоточном технологическом оборудовании, например, при обработке изделий лазерным инструментом.
Известен модуль перемещения координатного устройства, содержащий основание с направляющими, размещенную на направляющих и выполненную с пазом каретку, привод каретки, выполненный в виде линейного двигателя с расположенным между направляющими и скрепленным с основанием индуктором, якорем с обмотками, причем обмотки якоря размещены в пазе каретки, а поверхности опирания каретки расположены в одной плоскости [1].
Однако в этом устройстве плоскость, в которой расположен вектор продольной силы тяги, не совпадает с плоскостью, в которой расположена поверхность опирания каретки, что влечет создание дополнительного изгибающего момента, действующего на устройство. Дополнительные усилия снижают точность позиционирования.
Результат, для достижения которого направлено данное техническое решение, заключается в уменьшении изгибающих нагрузок при одновременном повышении точности позиционирования.
Указанный результат достигается за счет того, что в модуле перемещения, содержащем основание с направляющими, размещенную на направляющих и выполненную с пазом каретку, привод каретки, выполненный в виде линейного двигателя с расположенным между направляющими и скрепленным с основанием индуктором, якорем с обмотками, причем обмотки якоря размещены в пазе каретки, а поверхности опирания каретки расположены в одной плоскости, проводники обмоток якоря по глубине паза каретки расположены симметрично относительно плоскости опирания каретки.
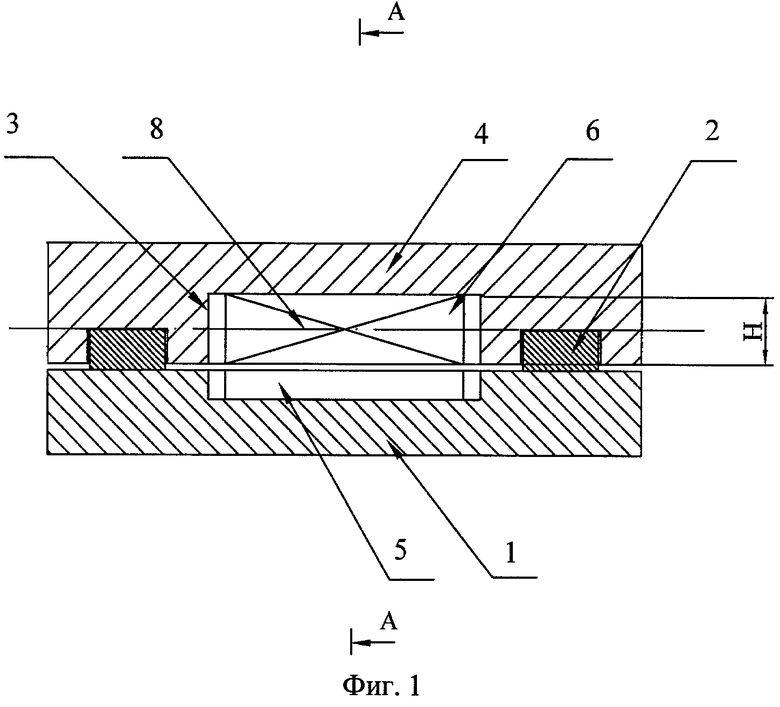
Изобретение поясняется чертежами, где на фиг.1 изображено заявляемое устройство, на фиг.2 - разрез А-А.
Модуль перемещения координатного устройства содержит основание 1 с направляющими 2, размещенную на направляющих 2 и выполненную с пазом 3 каретку 4, привод каретки, выполненный в виде линейного двигателя с расположенным между направляющими и скрепленным с основанием 1 индуктором 5 и якорем 6 с обмотками 7. Обмотки 7 якоря размещены в пазе 3 каретки, а поверхности опирания каретки расположены в одной плоскости 8.
Опирание каретки может происходить, например, на воздушную подушку при выполнении воздушных зазоров между направляющими и кареткой, либо на шаровые опоры при выполнении направляющих в виде шариковых опор.
Проводники 9 обмоток 7 якоря расположены по глубине Н паза 3 каретки 4 симметрично относительно плоскости 8 опирания каретки 4. В плоскости 8 располагается вектор продольной силы тяги F при перемещении каретки.
За счет того, что плоскость, в которой расположен вектор продольной силы тяги, совпадает с плоскостью, в которой расположена поверхность опирания каретки, исключается создание дополнительного изгибающего момента, действующего на устройство, за счет отсутствия плеча, что позволяет повысить точность позиционирования.
Таким образом, предложенное техническое решение позволит:
- повысить точность позиционирования модуля перемещения;
- уменьшить изгибающие нагрузки.
Источник информации
1. http://directdrive.ru/products/lsma/lsma-32
| название | год | авторы | номер документа |
|---|---|---|---|
| КООРДИНАТНЫЙ СТОЛ | 2010 |
|
RU2472606C2 |
| КООРДИНАТНЫЙ СТОЛ | 2009 |
|
RU2417870C2 |
| КРЕСТОВЫЙ СТОЛ | 2009 |
|
RU2418667C2 |
| КООРДИНАТНЫЙ СТОЛ, ПОРТАЛ КООРДИНАТНОГО СТОЛА И СПОСОБ ИЗГОТОВЛЕНИЯ ИНДУКТОРА МНОГОФАЗНОГО ЛИНЕЙНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1998 |
|
RU2133184C1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2000 |
|
RU2166829C1 |
| КООРДИНАТНЫЙ СТОЛ (ВАРИАНТЫ) | 2003 |
|
RU2244617C1 |
| Двухкоординатный линейный электрический привод | 1980 |
|
SU936264A1 |
| ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1992 |
|
RU2037771C1 |
| Линейный шаговый электродвигатель | 1981 |
|
SU1001348A1 |
| Многошпиндельный сверлильный станок | 1980 |
|
SU965620A1 |
Изобретение относится к области машиностроения, а именно к устройствам, обеспечивающим линейное перемещение обрабатываемого изделия, и может быть использовано в высокоточном технологическом оборудовании, например, при обработке изделий лазерным инструментом. Модуль перемещения координатного устройства содержит основание с направляющими, размещенную на направляющих и выполненную с пазом каретку, привод каретки, выполненный в виде линейного двигателя с расположенным между направляющими и скрепленным с основанием индуктором и якорем с обмотками. Обмотки якоря размещены в пазу каретки, а поверхности опирания каретки расположены в одной плоскости. Проводники обмоток якоря по глубине паза каретки расположены симметрично относительно плоскости опирания каретки. Обеспечивается уменьшение изгибающих нагрузок при одновременном повышении точности позиционирования. 2 ил.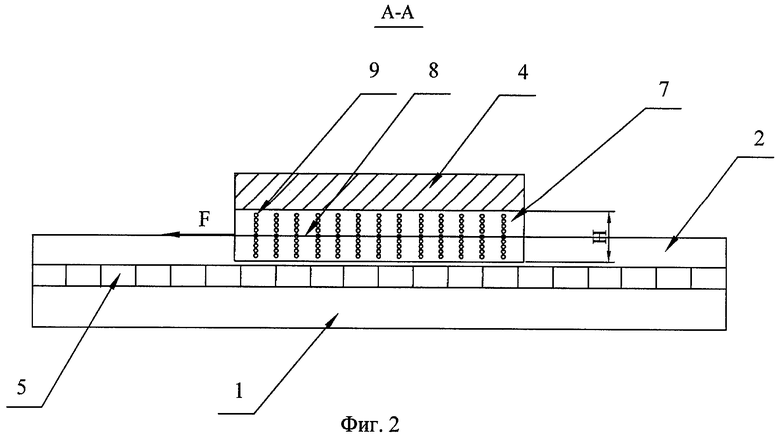
Модуль перемещения координатного устройства, содержащий основание с направляющими, размещенную на направляющих и выполненную с пазом каретку, привод каретки, выполненный в виде линейного двигателя с расположенным между направляющими и скрепленным с основанием индуктором и якорем с обмотками, причем обмотки якоря размещены в пазу каретки, а поверхности опирания каретки расположены в одной плоскости, отличающийся тем, что проводники обмоток якоря по глубине паза каретки расположены симметрично относительно плоскости опирания каретки.
| КООРДИНАТНЫЙ СТОЛ, ПОРТАЛ КООРДИНАТНОГО СТОЛА И СПОСОБ ИЗГОТОВЛЕНИЯ ИНДУКТОРА МНОГОФАЗНОГО ЛИНЕЙНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1998 |
|
RU2133184C1 |
| US 4834353 A, 30.05.1989 | |||
| US 4505464, 19.03.1985. | |||

