Изобретение относится к технике диагностики, а именно воздушного мониторинга с применением беспилотных летательных аппаратов, и может быть использован для систематического дистанционного контроля (мониторинга) состояния высоковольтных ЛЭП в автоматическом режиме, без участия оператора.
Известна система связи и наблюдения, содержащая наземные станции с приемопередающей аппаратурой и летательные аппараты (ЛА) для размещения приемопередающей аппаратуры, выполненной с возможностью обеспечения двунаправленной передачи сигналов между указанной аппаратурой и приемопередающей аппаратурой наземных станций. На летательном аппарате установлена аппаратура наблюдения за различными объектами (RU 2118056 C1, Н04В 7/185, от 20.08.98).
Прототипом является способ работы автоматического беспилотного комплекса диагностики протяженных объектов, оснащенных собственной информационной системой (патент РФ №2343438 С1, МПК G01M 3/00, 08.06.2007).
Автоматический беспилотный комплекс диагностики протяженных объектов, оснащенных собственной информационной системой, содержит дистанционно-пилотируемый летательный аппарат, включающий планер, силовую установку, систему автоматического управления с блоком управления бортовыми системами, систему автоматического дистанционного управления полетом летательного аппарата и работой его систем, бортовую систему диагностики состояния протяженных объектов, а также мобильный наземный пункт управления летательным аппаратом, радиотелеметрическую систему двунаправленной связи летательного аппарата и его мобильного наземного пункта управления, состоящую из бортовой и наземной аппаратуры. В состав комплекса дополнительно введен по крайней мере один комплект наземной аппаратуры радиотелеметрической системы, установленный на протяженном объекте в пределах прямой радиовидимости с дистанционно-пилотируемого летательного аппарата при его маловысотном полете и подключенный к собственной информационной системе протяженного объекта.
Недостатком способа работы автоматического беспилотного комплекса диагностики протяженных объектов является сложность эксплуатации из-за использования громоздких антенн, сложных систем энергопитания и сложной аппаратуры радиопередающих устройств летательных аппаратов.
Задачей изобретения является разработка способа работы автоматического беспилотного комплекса диагностики высоковольтных воздушных линий электропередачи, в котором устранен указанный недостаток прототипа.
Техническим результатом является упрощение эксплуатации за счет построения системы мониторинга высоковольтных воздушных линий электропередачи (ЛЭП), которая могла бы работать в автономном режиме, без ручного управления оператором с земли.
Технический результат достигается тем, что в способе работы автоматического беспилотного комплекса диагностики высоковольтных воздушных линий электропередачи, по которому осуществляют облет воздушной линии электропередачи летательным аппаратом, которым управляют дистанционно, используя пульт управления летательным аппаратом, при этом в летательный аппарат устанавливают систему автоматического управления летательным аппаратом, в блок памяти аппарата записывают маршрут полета, параметры полета, при облете воздушной линии электропередачи бортовая система диагностики аппарата изучает состояние воздушной линии электропередачи, определяют координаты летательного аппарата с помощью приемника спутниковой навигационной системы, согласно изобретению устанавливают в летательный аппарат измеритель напряженности электрического поля, при помощи которого непрерывно производят измерения вертикальной, горизонтально-продольной, вдоль проводов линии электропередачи и горизонтальной-поперечной, поперек проводов линии электропередачи, компонент электрического поля линии электропередачи промышленной частоты 50 Гц, по величине напряженности вертикальной компоненты электрического поля стабилизируют высоту полета летательного аппарата над воздушной линией электропередачи, по величине напряженности горизонтальной-поперечной компоненты электрического поля стабилизируют положение летательного аппарата относительно линии электропередачи в направлении поперек воздушной линии электропередачи и поперек направления полета, по фазе напряженности горизонтальной-продольной компоненты электрического поля относительно фазы вертикальной компоненты электрического поля определяют направление полета летательного аппарата.
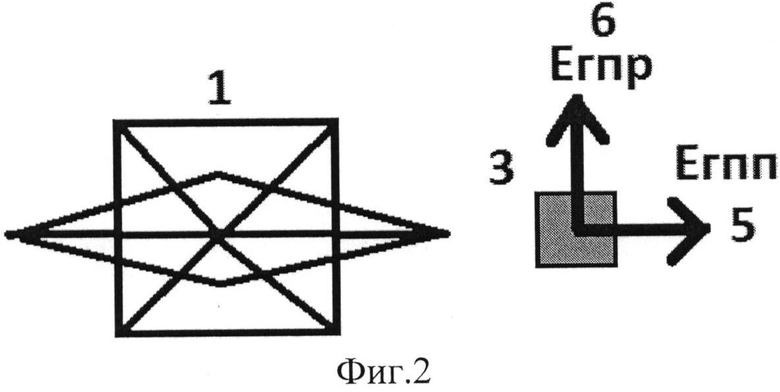
Предложенное техническое решение поясняется чертежами (фиг.1 - вид на воздушную линию электропередачи (ЛЭП) поперек проводов линии; фиг.2 - вид сверху на ЛЭП, провода линии идут сверху вниз), на которых изображен процесс облета летательным аппаратом линии электропередачи.
На чертежах обозначены:
1. Опора высоковольтной ЛЭП, на которой подвешены провода линии.
2. Высокое напряжение, поданное на провода ЛЭП, создает вокруг ЛЭП переменное электрическое поле 2 с промышленной частотой 50 Гц.
3. Летательный аппарат 3 (аппарат 3), который осуществляет облет ЛЭП вдоль проводов ЛЭП, для изучения состояния линии электропередачи.
4. Вертикальная компонента Ев электрического поля 2.
5. Горизонтальная-поперечная компонента Егпп электрического поля 2.
6. Горизонтальная-продольная компонента Егпр электрического поля 2.
На опоре 1 ЛЭП (фиг. 1) подвешены провода линии электропередачи, которые создают переменное электрическое поле 2 с частотой 50 герц. В позиции аппарата 3 имеется вертикальная 4 компонента Ев, горизонтальная-продольная 6 (вдоль проводов линии электропередачи) компонента Егпр электрического поля с частотой 50 герц и горизонтальная-поперечная 5 (поперек проводов линии) компонента Егпп электрического поля с частотой 50 герц.
Принцип работы аппарата 3. Стабилизация положения аппарата 3 относительно проводов линии электропередачи основана на том, что, во-первых, электрическое поле ЛЭП имеет вертикальную и горизонтальную-поперечную (поперек проводов линии электропередачи) компоненты электрического поля, а горизонтальная-продольная (вдоль проводов линии электропередачи) компонента электрического поля равна нулю (малое отличие от нуля возникнет за счет провиса проводов ЛЭП между опорами). При этом с удалением от проводов ЛЭП все компоненты электрического поля уменьшаются примерно, как (1/R), где R - расстояние до проводов ЛЭП. Во-вторых, фаза горизонтальной поперечной компоненты электрического поля меняется на 180 градусов при полете аппарата 3 вперед или назад вдоль линии.
Обследование ЛЭП с помощью аппарата 3 происходит следующим образом.
1. В блок памяти аппарата 3 записывается маршрут полета: координаты обследуемой ЛЭП.
2. Аппарат 3 в ручном режиме (используя пульт управления летательным аппаратом) позиционируется над ЛЭП на нужной высоте и боковом смещении относительно линии электропередачи, при направлении корпуса аппарата 3 вдоль ЛЭП.
3. В блок памяти аппарата 3 записываются параметры полета: эталонные величины вертикальной Ево, горизонтальной-поперечной Егппо и горизонтальной-продольной Егпро компонент электрического поля 2 частотой 50 Гц, записывается фаза Егппо относительно Ево, все эти параметры записываются аппаратом 3 после позиционировании его относительно ЛЭП в ручном режиме, и по команде с пульта управления летательным аппаратом.
4. Аппарат 3 в автоматическом режиме (под управлением установленной в аппарат 3 системы автоматического управления летательным аппаратом) начинает облет ЛЭП.
5. Во время облета ЛЭП аппаратом 3 бортовая система диагностики аппарата изучает состояние линии электропередачи и записывает полученные данные в память аппарата 3.
6. Высота полета поддерживается сравнением Ево с текущими измерениями вертикальной Ев (4) компоненты электрического поля частотой 50 Гц: при Ев>Ево аппарат 3 повышает высоту полета, при Ев<Ево аппарат 3 понижает высоту полета.
7. Положение аппарата 3 поперек линии электропередачи поддерживается сравнением Егппо с текущими измерениями горизонтальной-поперечной Егпп (5) компоненты электрического поля частотой 50 Гц: при Егпп>Егппо аппарат 3 удаляется от линии, при Егпп<Егппо аппарат 3 приближается к ЛЭП в горизонтальном направлении.
8. Безопасное расстояние аппарата 3 до проводов ЛЭП поддерживается сравнением величины Ео=(Ево*Ево+Егпро*Егпро+Егппо*Егппо) с текущей величиной Е=(Ев*Ев+Егпр*Егпр+Егпп*Егпп) (величиной квадрата напряженности электрического поля частотой 50 Гц): при Е>1,1*Ео аппарат 3 удаляется от линии.
9. Положение корпуса аппарата 3 вдоль линии электропередачи (направление корпуса аппарата 3 вдоль проводов линии) выдерживается сохранением значения Егпр (6) около нулевого значения.
10. Правильное направление полета аппарата 3 поддерживается сравнением фаз Ев (4) и Егпп (5), поскольку при изменении направления полета на противоположное фаза Егпп (5) меняется на 180 градусов.
11. Правильное направление полета контролируется изменением во времени текущих координат (которые непрерывно определяются с помощью приемника спутниковой навигационной системы) и маршрут полета (записанный в блок памяти аппарата 3).
Таким образом, предлагаемый способ работы автоматического беспилотного комплекса диагностики высоковольтных воздушных линий электропередачи позволяет в автоматическом режиме, без участия оператора, проводить обследование ЛЭП, совершая облет линии электропередачи летательным аппаратом в автоматическом режиме.
Изобретение относится к способам управления беспилотным летательным комплексом. При данном способе осуществляют облет воздушной линии электропередач (ЛЭП). При этом используют пульт управления летательным аппаратом (ЛА). Устанавливают на ЛА систему автоматического управления и измеритель напряженности электрического поля. Определяют координаты ЛА с помощью приемника спутниковой навигационной системы. Производят измерения вертикальной, горизонтально-продольной, горизонтально-поперечной компонент электрического поля ЛЭП промышленной частоты 50 Гц. По полученным данным стабилизируют высоту и направление полета ЛА вдоль ЛЭП. Обеспечивается облет ЛЭП без участия оператора. 2 ил.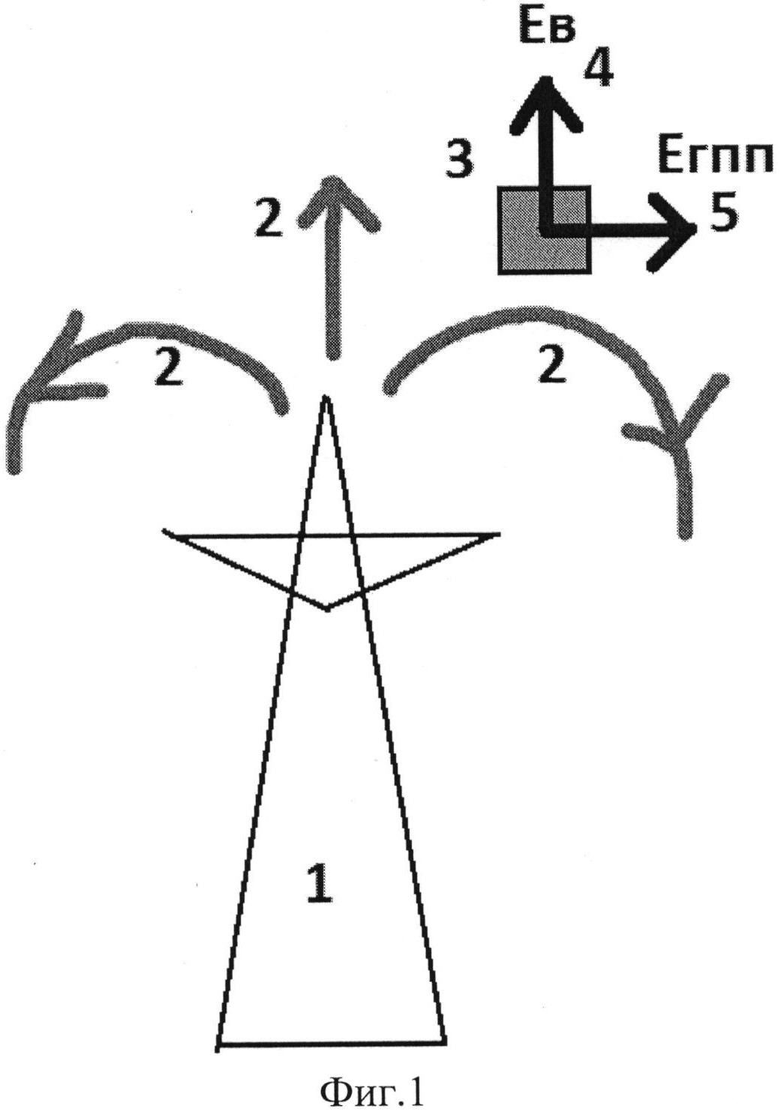
Способ работы автоматического беспилотного комплекса диагностики высоковольтных воздушных линий электропередачи, по которому осуществляют облет воздушной линии электропередачи летательным аппаратом, которым управляют дистанционно, используя пульт управления летательным аппаратом, при этом в летательный аппарат устанавливают систему автоматического управления летательным аппаратом, в блок памяти аппарата записывают маршрут полета, параметры полета, при облете воздушной линии электропередачи бортовая система диагностики аппарата изучает состояние воздушной линии электропередачи, определяют координаты летательного аппарата с помощью приемника спутниковой навигационной системы, отличающийся тем, что устанавливают в летательный аппарат измеритель напряженности электрического поля, при помощи которого непрерывно производят измерения вертикальной, горизонтально-продольной, вдоль проводов линии электропередачи и горизонтальной-поперечной, поперек проводов линии электропередачи, компонент электрического поля линии электропередачи промышленной частоты 50 Гц, по величине напряженности вертикальной компоненты электрического поля стабилизируют высоту полета летательного аппарата над воздушной линией электропередачи, по величине напряженности горизонтальной-поперечной компоненты электрического поля стабилизируют положение летательного аппарата относительно линии электропередачи в направлении поперек воздушной линии электропередачи и поперек направления полета, по фазе напряженности горизонтальной-продольной компоненты электрического поля относительно фазы вертикальной компоненты электрического поля определяют направление полета летательного аппарата.
| СПОСОБ АЭРОДИАГНОСТИКИ ВЫСОКОВОЛЬТНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2011 |
|
RU2483314C1 |
| СПОСОБ ДИАГНОСТИКИ ВЫСОКОВОЛЬТНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2010 |
|
RU2421746C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КРАТЧАЙШЕГО РАССТОЯНИЯ ДО ВЫСОКОВОЛЬТНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2260198C9 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КРАТЧАЙШЕГО РАССТОЯНИЯ И НАПРАВЛЕНИЯ НА ЛИНИЮ ЭЛЕКТРОПЕРЕДАЧИ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2316790C1 |
| WO 2006083408 A1, 10.08.2006 | |||
| US 0007286912 B2, 23.10.2007 | |||

