Изобретение относится к беспилотным летательным аппаратам (БЛА) и может быть использовано для диагностики высоковольтных электроустановок, находящихся под напряжением.
Известен маломерный беспилотный летательный аппарат (RU 2232104, В64С 29/02, G01V 9/00, 10.07.2004), содержащий радиоуправляемую бортовую систему обеспечения полета летательного аппарата, бортовую приемопередающую аппаратуру и видеокамеру с передатчиком изображения. Радиоуправляемая бортовая система обеспечения полета летательного аппарата и радионавигационная система управления летательным аппаратом снабжены корректируемыми по глобальной навигационной системе инерциальными блоками с микромеханическими вибрационными гироскопами - акселерометрами. На фюзеляже беспилотного летательного аппарата размещены винтовой движитель, рулевое управление по курсу и тангажу, антенная система и аккумуляторная батарея. Винтовой движитель выполнен в виде, по меньшей мере, одного винтового блока с редуктором и электродвигателем, подключенным к аккумуляторной батарее.
Недостатком данного устройства является то, что для питания электродвигателя винтового движителя используется аккумуляторная батарея, поэтому продолжительность полета ограничена ее емкостью. Необходимость зарядки аккумуляторной батареи предполагает прекращение полета и приземление маломерного беспилотного летательного аппарата.
Известен маломерный беспилотный летательный аппарат для диагностики высоковольтных электроустановок (RU 149070, В64С 39/02, G01R 31/08, 20.12.2014), выбранный в качестве прототипа, содержит, портативный компьютер, систему автоматического пилотирования БЛА и измерительную аппаратуру, при этом система автоматического пилотирования БЛА содержит устройство автоматического пилотирования, блок навигации и датчики измерения напряженности магнитного поля, причем портативный компьютер соединен с устройством автоматического пилотирования, блоком навигации, датчиками измерения напряженности магнитного поля, измерительной аппаратурой, а также с удаленным устройством радиоуправления, БЛА дополнительно содержит вращающиеся элементы в виде лопастей, систему магнитных антенн в виде электрических обмоток, аккумуляторную батарею и подзаряжающее устройство, при этом подзаряжающее устройство содержит последовательно соединенные накопитель электроэнергии и систему снабжения БЛА электроэнергией, которая соединена с портативным компьютером и аккумуляторной батареей, а система магнитных антенн встроена во вращающиеся элементы и соединена гальванической связью с накопителем электроэнергии и магнитной связью с высоковольтной электроустановкой.
Недостатком прототипа является ограниченная продолжительность полета, обусловленная тем, что аккумуляторная батарея подзаряжается только при наличии электромагнитного поля высоковольтной установки.
Задача изобретения - увеличение продолжительности полета путем создания дополнительного вращающегося магнитного поля, пронизывающего витки обмоток, закрепленных на лопастях.
Технический результат достигается тем, что в беспилотном летательном аппарате для диагностики высоковольтных электроустановок, содержащем корпус, на котором жестко закреплены электрические двигатели, на полых внешних валах которых жестко закреплены воздушные лопасти, внутри корпуса расположен портативный компьютер, первый, второй, третий и четвертый порты которого соответственно соединены с измерительной аппаратурой с датчиками измерения напряженности магнитного поля, устройством автоматического пилотирования, блоком навигации и первым входом жестко закрепленной внутри корпуса аккумуляторной батареи, выход и второй вход которой соединены с электрическими двигателями и с выходом подзаряжающего устройства, к входу которого с помощью гальванической связи подключены магнитные антенны, жестко закрепленные на воздушных лопастях, внутри полых внешних валов электрических двигателей расположены соосно с ними внутренние валы, полые внешние валы и внутренние валы присоединены к электрическим двигателям с помощью трансмиссии, на внутренних валах жестко закреплены дополнительные лопасти, на которых расположены постоянные магниты.
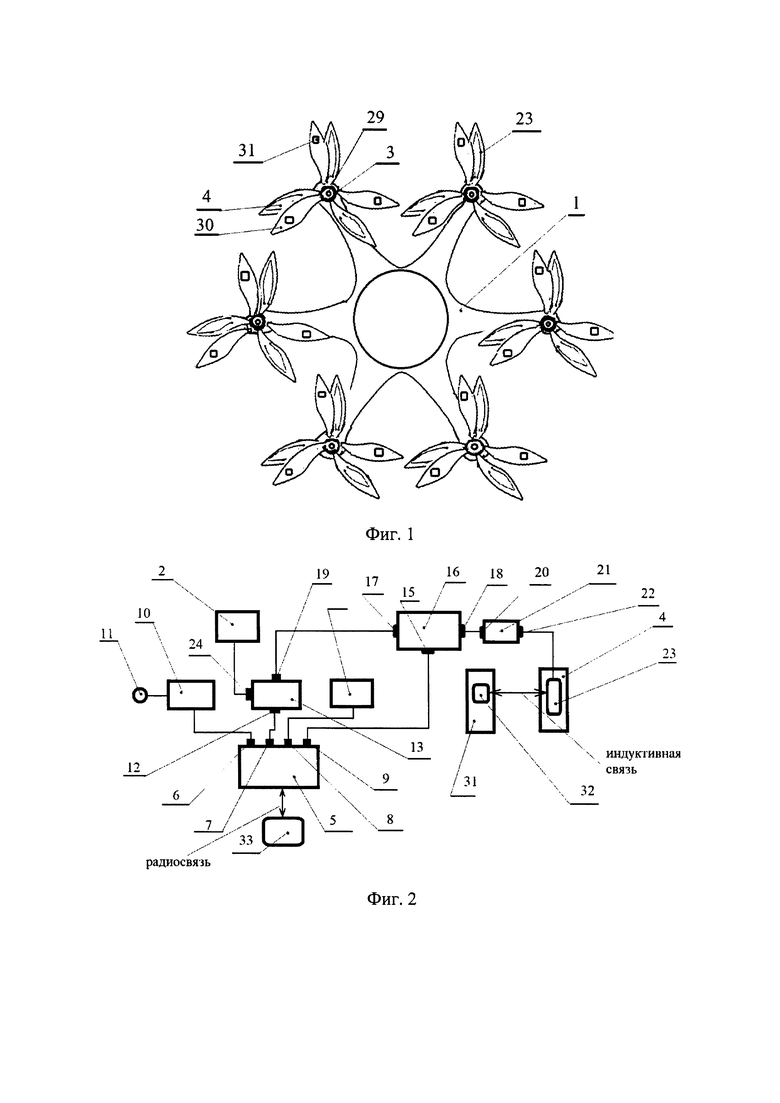
Общий вид беспилотного летательного аппарата для диагностики высоковольтных электроустановок показан на фиг. 1, а на фиг. 2 - его блок схема диагностики высоковольтных электроустановок. На фиг. 3 приведена конструкция электрического двигателя с воздушными винтами.
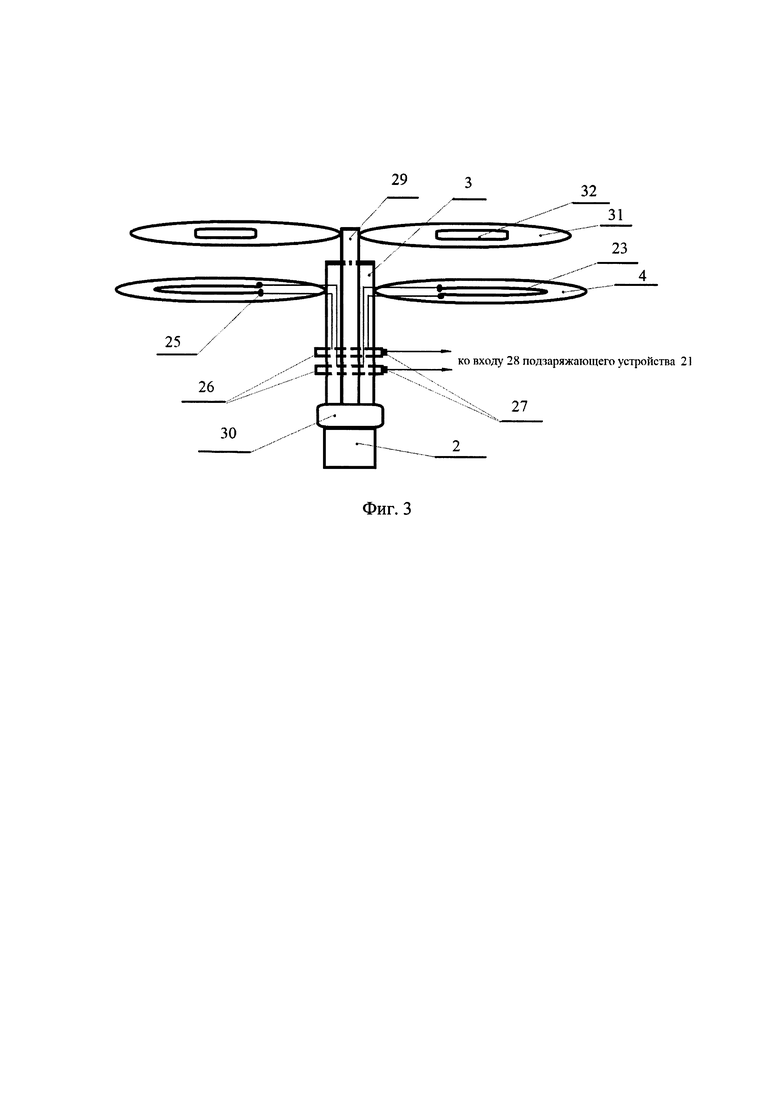
Беспилотный летательный аппарат для диагностики высоковольтных электроустановок содержит корпус 1 (фиг. 1), на котором жестко закреплены электрические двигатели 2, например AXI 2814/22, 037 или RacerstarRacingEdition 2306 2700KV или Readytosky 2205-2300 2300KV или RacerstarRacingEdition 2205 2300KV, на полых внешних валах 3 которых жестко закреплены воздушные лопасти 4. Внутри корпуса 1 расположен портативный компьютер 5 (фиг. 2), первый 6, второй 7, третий 8 и четвертый 9 порты которого соответственно соединены с измерительной аппаратурой 10 с датчиками измерения напряженности магнитного поля 11, например, типа EPIC или РаЭ 8/00-15, первым входом 12 устройства автоматического пилотирования 13, блоком навигации 14, например, GPS- или ГЛОНАСС-навигаторы, и первым входом 15 жестко закрепленной внутри корпуса 1 аккумуляторной батареи 16, например LiPo 4S1300 mA×h или 1500 mA×h. Выход 17 и второй вход 18 которой соединены со вторым входом 19 устройства автоматического пилотирования 13 и с выходом 20 подзаряжающего устройства 21, к входу 22 которого с помощью гальванической связи подключены магнитные антенны 23, например, электрические обмотки, жестко закрепленные на воздушных лопастях 4. Выход 24 устройства автоматического пилотирования 13 соединен с электрическими двигателями 2. Гальваническая связь реализуется следующим образом: выводы 25 (фиг. 3) магнитных антенн 23 соединены с контактными кольцами 26, жестко закрепленными на полых внешних валах 3 электрических двигателей 2, по которым скользят электрические щетки 27, которые соединены с входом 28 (фиг. 2) подзаряжающего устройства 21.
Внутри полых внешних валов 3 (фиг. 3) электрических двигателей 2 расположены соосно с полыми внешними валами 3 внутренние валы 29. Полые внешние валы 3 и внутренние валы 29 присоединены к электрическим двигателям 2 с помощью трансмиссии 30. На внутренних валах 29 жестко закреплены дополнительные лопасти 31, на которых расположены постоянные магниты 32, например, гибкие и жесткие (негибкие) полимерные магниты на основе бариевого или стронциевого ферритов, сплавов на основе редкоземельных элементов: неодим-железо-бор, самарий-кобальт, самарий-железо с использованием термопластов и эластомеров.
Эксплуатация беспилотного летательного аппарата для диагностики высоковольтных электроустановок предполагает использование удаленного устройства радиоуправления 33 БЛА (фиг. 2).
Беспилотный летательный аппарат для диагностики высоковольтных электроустановок работает следующим образом.
С помощью удаленного устройства радиоуправления 33 в «ручном» режиме БЛА сближается с высоковольтной электроустановкой, например, воздушной линией электропередачи или контактным проводом электрифицированного железнодорожного транспорта (не показаны). По сигналам удаленного устройства радиоуправления 33 начинают работать устройство автоматического пилотирования 13 (фиг. 2), блок навигации 14 и датчики напряженности магнитного поля 11. Сближение происходит до тех пор, пока датчики напряженности магнитного поля 11 не зарегистрирует напряженность магнитного поля, близкую к 1 кВ/см, что составляет пробивную напряженность влажного воздуха. Сигналы с датчиков напряженности магнитного поля 11 поступают на измерительную аппаратуру 10, сигнал с которой поступает на первый порт 6 портативного компьютера 5. Портативный компьютер 5 генерирует управляющий сигнал, поступающий с его первого порта 7 на первый вход 12 устройства автоматического пилотирования 13. Сигнал с выхода 24 устройства автоматического пилотирования 13 поступает на электрические двигатели 2. Под действием этого сигнала фиксируется частота вращения воздушных лопастей 4 и БЛА «зависает» или летит над высоковольтной электроустановкой, например, над проводом линии электропередачи на фиксированном расстоянии от него. Магнитное поле высоковольтной электроустановки по закону электромагнитной индукции индуцирует во вращающихся магнитных антеннах 23 электродвижущую силу, под действием которой в цепи, которая состоит из магнитной антенны 23 (фиг. 3), контактных колец 26, электрических щеток 27, подзаряжающего устройства 21 и аккумуляторной батареи 16 (фиг. 2) начинает протекать ток. Таким образом, осуществляется подзаряд аккумуляторной батареи 16.
Измерительная информация, поступающая с датчиков напряженности магнитного поля 11, и текущие координаты БЛА, получаемые во время полета посредством блока навигации 14, записываются в долговременную память портативного компьютера 5.
Также возможен способ автоматического пилотирования посредством получения сигналов GPS / ГЛОНАСС с помощью блока навигации 14.
Одновременно с вращением полых внешних валов 3 электрических двигателей 2 (фиг. 3) происходит вращение соосных им внутренних валов 29, причем из-за действия трансмиссии 30 - это вращение осуществляется в противоположном направлении. В результате вращения дополнительных лопастей 31 осуществляется подсос добавочного воздуха сбоку. Вращающееся магнитное поле постоянных магнитов 32 индуцирует в магнитных антеннах 23 дополнительную электродвижущую силу, которая увеличивает зарядный ток аккумуляторной батареи 16. Данное конструктивное решение позволяет получить зарядный ток и в отсутствии внешнего магнитного поля высоковольтной электроустановки.
Таким образом, использование заявляемого устройства позволит увеличить продолжительность, и, соответственно, дальность полета БЛА при проведении диагностики высоковольтных электроустановок.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АЭРОДИАГНОСТИКИ ВЫСОКОВОЛЬТНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2011 |
|
RU2483314C1 |
| Роботизированный комплекс контроля линий электропередач и электроподстанций. | 2021 |
|
RU2748134C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ КОМПЛЕКС | 2023 |
|
RU2810956C1 |
| Беспилотный летательный аппарат для внесения отравленных приманок | 2023 |
|
RU2811180C1 |
| СПОСОБ ДИАГНОСТИКИ ВЫСОКОВОЛЬТНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2010 |
|
RU2421746C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Беспилотный летательный комплекс | 2024 |
|
RU2836414C1 |
| Беспилотный летательный аппарат для отбора почвенных образцов | 2024 |
|
RU2828894C1 |
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |
| Беспилотный летательный аппарат для определения электропроводности почвы | 2024 |
|
RU2829829C1 |
Изобретение относится к беспилотным летательным аппаратам и может быть использовано для диагностики высоковольтных электроустановок. Одновременно с вращением полых внешних валов (3) происходит вращение соосных им внутренних валов (29), причем из-за действия трансмиссии (30) это вращение осуществляется в противоположном направлении. В результате вращения дополнительных лопастей (31) осуществляется подсос добавочного воздуха сбоку. Вращающееся магнитное поле постоянных магнитов (32), жестко закрепленных на дополнительных лопастях (31), индуцирует в магнитных антеннах (23) дополнительную электродвижущую силу, которая увеличивает зарядный ток аккумуляторной батареи (16) и позволяет осуществлять зарядку даже в отсутствии внешнего магнитного поля. Технический результат - увеличение продолжительности полета. 3 ил.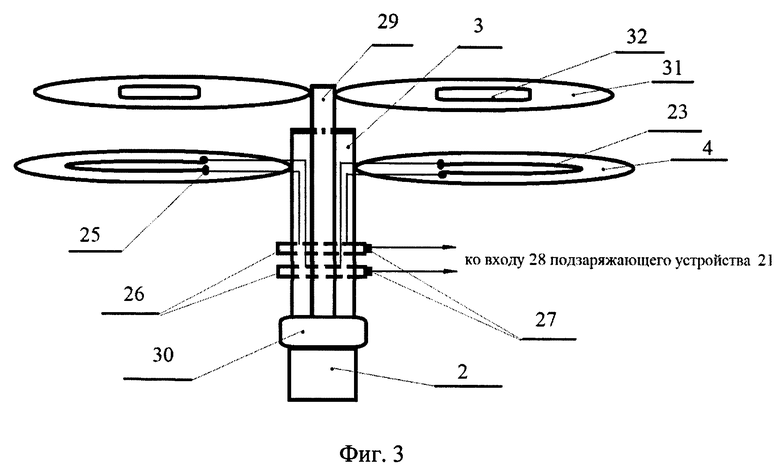
Беспилотный летательный аппарат для диагностики высоковольтных электроустановок, содержащий корпус, на котором жестко закреплены электрические двигатели, на полых внешних валах которых жестко закреплены воздушные лопасти, внутри корпуса расположен портативный компьютер, первый, второй, третий и четвертый порты которого соответственно соединены с измерительной аппаратурой с датчиками измерения напряженности магнитного поля, устройством автоматического пилотирования, блоком навигации и первым входом жестко закрепленной внутри корпуса аккумуляторной батареи, выход и второй вход которой соединены с электрическими двигателями и с выходом подзаряжающего устройства, к входу которого с помощью гальванической связи подключены магнитные антенны, жестко закрепленные на воздушных лопастях, отличающийся тем, что внутри полых внешних валов электрических двигателей расположены соосно с ними внутренние валы, полые внешние валы и внутренние валы присоединены к электрическим двигателям с помощью трансмиссии, на внутренних валах жестко закреплены дополнительные лопасти, на которых расположены постоянные магниты.
| Буровая кольцевая коронка | 1960 |
|
SU149070A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА ОБЪЕКТОВ ЭЛЕКТРОЭНЕРГЕТИКИ | 2021 |
|
RU2776589C1 |
| Модульный беспилотный летательный аппарат с системой защиты тяговых винтов | 2020 |
|
RU2752110C1 |
| АВТОМАТИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ЭЛЕКТРОСЕТЕВОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2674550C1 |
| Поворотный стол для обработки толя | 1932 |
|
SU32919A1 |
| WO 2019063169 A1, 04.04.2019 | |||
| WO 2019171231 A1, 12.09.2019. | |||

