Изобретение относится к воздушным электрическим сетям и предназначено для мониторинга технического состояния элементов воздушной линии электропередачи (ЛЭП), посредством беспилотного летательного аппарата (БЛА).
Известен способ аварийного управления беспилотным летательным аппаратом (БЛА), осуществляющим мониторинг технического состояния воздушной линии электропередачи (ЛЭП) при потере радиосвязи с наземным пунктом управления (НПУ), заключающийся в активизации автопилота, реагирующего на электромагнитное поле (ЭМП) формируемое воздушной ЛЭП и направляющего БЛА вдоль ее трассы в заранее установленный район аварийной посадки (ЗУРАП) [Чернышов В.А., Семенов А.Е., Печагин Е.А. Способ управления беспилотным летательным аппаратом, осуществляющим мониторинг технического состояния воздушной линии 10 кВ при потере радиосвязи с наземным пунктом управления / В.И. Вернадский: Устойчивое развитие регионов: материалы Международной научно-практической конференции. В 5 Т.Т.4 (Тамбов, 7-9 июня 2016 г. ). Изд-во ФГБОУ ВО ТГТУ. 2016. С. 247-251 - прототип].
Недостатками данного способа являются:
- высокая вероятность утраты БЛА, потерявшего радиосвязь с наземным пунктом управления при продолжительном перелете, как в прямом, так и в обратном направлениях, вдоль трассы воздушной ЛЭП в заранее установленные районы аварийной посадки, которые могут быть организованы лишь в начале и в конце воздушной ЛЭП, т.к. при мониторинге технического состояния воздушной ЛЭП потеря радиосвязи БЛА с НПУ может произойти в любой момент времени;
- перерасход временных, трудовых и материальных ресурсов при идентификации места аварийной посадки БЛА, обусловленный удаленностью друг от друга ЗУРАП, расположенных в начале и конце воздушной ЛЭП;
- высокая вероятность возникновения материального ущерба и травматизма обслуживающего персонала, вследствие падения БЛА, обусловленная длительным, неконтролируемым с НПУ перелетом БЛА в ЗУРАП, расположенные в начале и в конце воздушной ЛЭП.
Указанные недостатки существенно снижают эффективность применения БЛА при осуществлении мониторинга состояния воздушных ЛЭП, что в целом отрицательно сказывается на надежности электроснабжения потребителей и эффективности функционирования энергоснабжающей организации.
Задачей предлагаемого изобретения является повышение эффективности применения БЛА при осуществлении мониторинга состояния воздушной ЛЭП, за счет предотвращения случаев утери БЛА, уменьшения временных трудовых и материальных затрат при отыскании места аварийной посадки БЛА, а также предотвращения материального ущерба и травматизма обслуживающего персонала возникающих при падении БЛА.
Указанная задача решается благодаря тому, что в известном способе управления БЛА, осуществляющим мониторинг технического состояния воздушной ЛЭП при потере радиосвязи с НПУ, заключающимся в активизации автопилота, реагирующего на ЭМП, формируемого воздушной ЛЭП и направляющего БЛА вдоль ее трассы в ЗУРАП, согласно изобретению, вокруг опор воздушной ЛЭП, находящейся в центральной части ЗУРАП БЛА, формируют ЭМП, уровень напряженности которого выше чем уровень напряженности ЭМП, формируемого воздушной ЛЭП, предварительно задают команду автопилоту БЛА на реализацию режима аварийной посадки, после того как его чувствительные элементы зафиксируют источник ЭМП с напряженностью выше чем напряженность ЭМП, создаваемого воздушной ЛЭП, контролируют скорость, направление и продолжительность полета БЛА до потери радиосвязи с НПУ, вычисляют расстояние, пройденное БЛА в штатном режиме и идентифицируют первый на пути его дальнейшего следования ЗУРАП и время аварийной посадки, после чего направляют туда персонал НПУ для оперативного возвращения в строй БЛА.
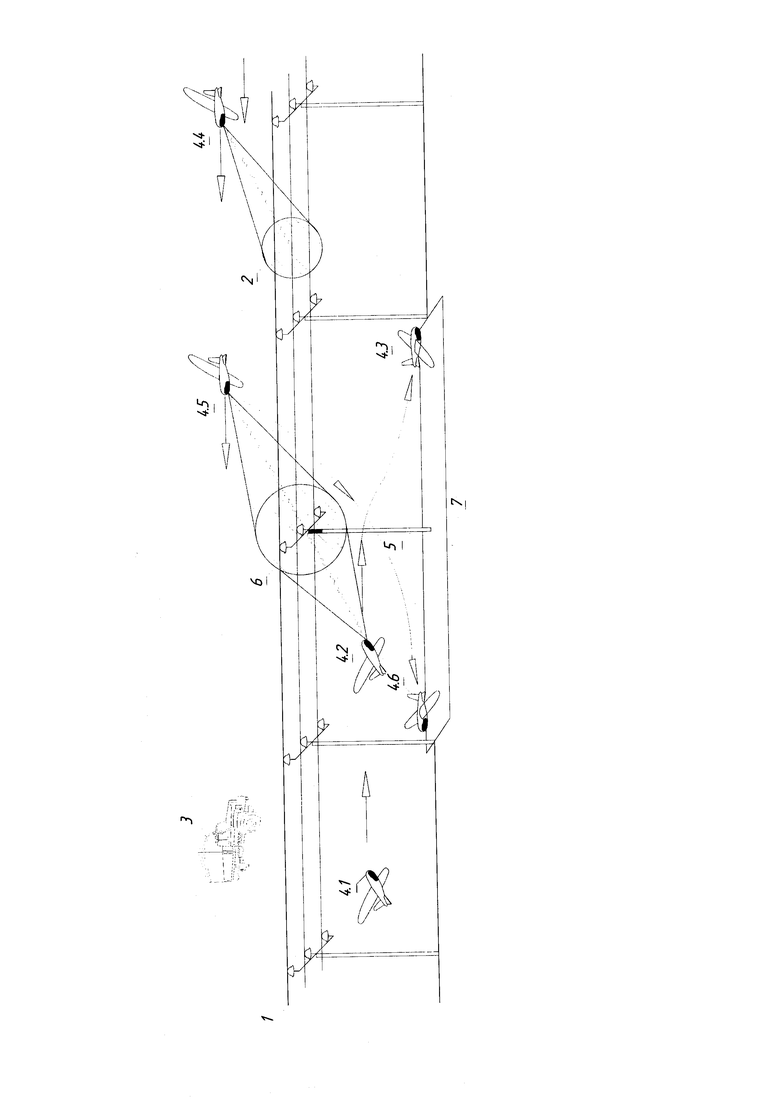
Сущность предлагаемого изобретения поясняется рисунком, на котором представлена принципиальная схема способа обеспечения аварийной посадки беспилотного летательного аппарата в заданном районе при выполнении мониторинга воздушной линии электропередачи и потери связи с наземным пунктом управления.
Схема содержит следующие элементы: воздушная линия электропередачи ЛЭП 1, электромагнитное поле ЭМП 2, формируемое воздушной ЛЭП 1, наземный пункт управления НПУ 3, беспилотный летательный аппарат БЛА 4, находящийся в положениях 1 - осуществление мониторинга состояния ЛЭП 1 в прямом направлении (БЛА 4.1), 2 - потеря связи с НПУ 3 при полете в прямом направлении (БЛА 4.2), 3 - осуществление аварийной посадки в прямом направлении (БЛА 4.3), 4 - осуществление мониторинга состояния ЛЭП 1 в обратном направлении (БЛА 4.4), 5 - потеря связи с НПУ 3 при полете в обратном направлении (БЛА 4.5) и 6 - осуществление аварийной посадки в обратном направлении (БЛА 4.6), опора 5 воздушной ЛЭП 1, вокруг которой формируется ЭМП 6 с напряженностью больше чем напряженность ЭМП 2, формируемая воздушной ЛЭП 1, заранее установленный район аварийной посадки ЗУРАП 7.
Предлагаемый способ осуществляется следующим образом:
БЛА 4.1 (4.4), осуществляющий мониторинг состояния ЛЭП 1 по команде с НПУ 3 при потере связи с НПУ 3, условно принимает статус БЛА 4.2 (4.5) и продолжает свое движение вдоль воздушной ЛЭП 1 уже под управлением автопилота, чувствительные органы которого реагируют на напряженность ЭМП 2. По всей длине воздушной ЛЭП 1 предварительно организуется необходимое количество ЗУРАП 7, в центральной части которых вокруг опор 5 формируется ЭМП 6, уровень напряженности которого выше, чем уровень напряженности ЭМП 2, формируемого воздушной ЛЭП 1. При подлете БЛА 4.2 (4.5) к любой из оказавшихся на его пути опор 4 воздушной ЛЭП 1, его автопилот отрабатывает заранее установленную команду на приземление в ЗУРАП 7, т.к. чувствительные органы автопилота фиксируют источник ЭМП 6 с напряженностью выше, чем напряженность ЭМП 2 формируемое воздушной ЛЭП 1. После приземления БЛА 4.2 (4.5), потерявший связь с наземным пунктом условно управления принимает статус приземлившегося БЛА 4.3 (4.6). При этом с НПУ 3 контролируют скорость, направление и продолжительность полета БЛА 4.2 (4.5) до потери связи, вычисляют расстояние, пройденное БЛА 4.2 (4.5) в штатном режиме и идентифицируют первый на пути его дальнейшего следования ЗУРАП 7 и время аварийной посадки, после чего направляют туда персонал НПУ 3 для оперативного возвращения в строй БЛА 4.3 (4.6).
Предлагаемый способ позволяет сократить вероятность утраты дорогостоящего БЛА 4 и в случае потери связи с НПУ 3 оперативно и экономично идентифицировать место его аварийного приземления.
Способ также позволяет предотвратить материальный ущерб и травматизм обслуживающего персонала, вызванные неконтролируемыми полетом и приземлением БЛА 4, что существенно повышает эффективность его применения для осуществления мониторинга состояния ЛЭП 1 и в целом положительно скажется на надежности электроснабжения потребителей и эффективности функционирования энергоснабжающей организации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАВЕРШЕНИЯ ПОЛЕТА ДРОНА В УСТАНОВЛЕННОМ РАЙОНЕ АВАРИЙНОЙ ПОСАДКИ ПРИ ОСУЩЕСТВЛЕНИИ МОНИТОРИНГА СОСТОЯНИЯ ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ В СЛУЧАЕ ПОТЕРИ СВЯЗИ С НАЗЕМНЫМ ПУНКТОМ УПРАВЛЕНИЯ | 2021 |
|
RU2785445C1 |
| УНИФИЦИРОВАННЫЙ БОРТОВОЙ МОДУЛЬ АВИАЦИОННОГО НАБЛЮДЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2794287C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС БЕСПИЛОТНОГО ВОЗДУШНОГО МОНИТОРИНГА | 2015 |
|
RU2612754C1 |
| АВТОМАТИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ЭЛЕКТРОСЕТЕВОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2674550C1 |
| Беспилотный летательный аппарат-перехватчик | 2020 |
|
RU2741142C2 |
| Бортовая интеллектуальная система поиска и наведения беспилотного летательного аппарата | 2023 |
|
RU2819590C1 |
| АЭРОМОБИЛЬНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ВЕРТОЛЕТНОГО ТИПА | 2022 |
|
RU2792314C1 |
| СПОСОБ АЭРОДИАГНОСТИКИ ВЫСОКОВОЛЬТНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2011 |
|
RU2483314C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2526094C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И ТРАНСПОРТНЫХ СРЕДСТВ ЦЕНТРОМ КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ В ВОЗДУШНОМ, НАЗЕМНОМ ПРОСТРАНСТВЕ | 2018 |
|
RU2676519C1 |
Изобретение относится к воздушным электрическим сетям и предназначено для мониторинга технического состояния элементов воздушной линии электропередачи (ЛЭП), посредством беспилотного летательного аппарата (БЛА). Технический результат изобретения заключается в повышении быстродействия и точности идентификации места аварийного приземления БЛА. Способ управления БЛА, осуществляющего мониторинг технического состояния воздушной линии электропередачи при потере радиосвязи с наземным пунктом управления, отличается тем, что вокруг опор воздушной линии электропередачи, находящихся в центральной части заранее установленных районов аварийной посадки беспилотного летательного аппарата, формируют электромагнитное поле, уровень напряженности которого выше, чем уровень напряженности электромагнитного поля, формируемого воздушной линией электропередачи, причем при потере связи с наземным пунктом управления беспилотный летательный аппарат продолжает движение вдоль воздушной линии электропередачи под управлением автопилота, которому предварительно задают команду на реализацию режима аварийной посадки в находящемся под ним районе после того, как его чувствительные элементы зафиксируют источник электромагнитного поля с напряженностью выше, чем напряженность электромагнитного поля, создаваемого воздушной линией электропередачи. 1 ил.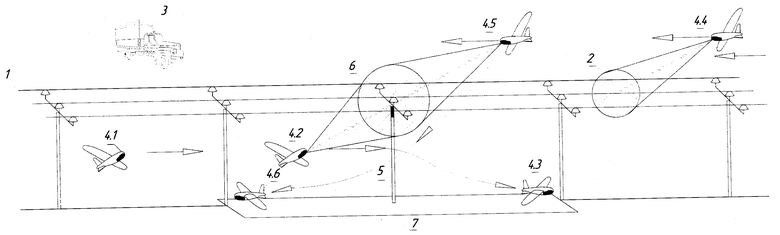
Способ обеспечения аварийной посадки беспилотного летательного аппарата в заданном районе при выполнении мониторинга воздушной линии электропередачи и потере связи с наземным пунктом управления, заключающийся в активизации автопилота, реагирующего на электромагнитное поле, формируемое воздушной линией электропередачи, и направляющего беспилотный летательный аппарат вдоль ее трассы в заранее установленный район аварийной посадки, отличающийся тем, что вокруг опор воздушной линии электропередачи, находящихся в центральной части заранее установленных районов аварийной посадки беспилотного летательного аппарата, формируют электромагнитное поле, уровень напряженности которого выше, чем уровень напряженности электромагнитного поля, формируемого воздушной линией электропередачи, причем при потере связи с наземным пунктом управления беспилотный летательный аппарат продолжает движение вдоль воздушной линии электропередачи под управлением автопилота, которому предварительно задают команду на реализацию режима аварийной посадки в находящемся под ним районе после того, как его чувствительные элементы зафиксируют источник электромагнитного поля с напряженностью выше, чем напряженность электромагнитного поля, создаваемого воздушной линией электропередачи.
| СПОСОБ ПИЛОТИРОВАНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2634470C2 |
| СПОСОБ РАБОТЫ АВТОМАТИЧЕСКОГО БЕСПИЛОТНОГО КОМПЛЕКСА ДИАГНОСТИКИ ВЫСОКОВОЛЬТНЫХ ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 2014 |
|
RU2555585C1 |
| СПОСОБ ДИАГНОСТИКИ ВЫСОКОВОЛЬТНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2010 |
|
RU2421746C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РОБОТИЗИРОВАННОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В АВТОНОМНОМ РЕЖИМЕ | 2020 |
|
RU2733453C1 |
| WO 2006083408 A1, 10.08.2006. | |||
