Изобретение относится к способу и летательному аппарату для контроля эксплуатационного состояния и определения вероятности выхода из строя находящихся под напряжением систем линий электропередачи в виде систем воздушных линий электропередачи (ЛЭП). Этот способ осуществляется с воздуха посредством винтокрылого летательного аппарата, в частности вертолета, с помощью которого контролируются опоры, провода и трансформаторные подстанции, включая их оборудование. В рамках изобретения под вертолетом в самом широком смысле понимается винтокрылый летательный аппарат, и также летательный аппарат со способностью вертикального взлета, с помощью которого возможно зависание.
Известны способы контроля и летательные аппараты для осуществления способа и для определения физических свойств.
Использование летательных аппаратов для проведения контроля с воздуха состояний надземных систем токопроводящих линий, т.е. ЛЭП в виде энергетических трасс, не только относительно дорого. Летательные аппараты имеют также тот недостаток, что для выполнения как можно большого числа измерительных задач, необходимая для этого нагрузка на летательный аппарат, за счет многочисленных измерительных приборов для проведения большого числа измерений, требующихся для этой цели, ограничена максимальной нагрузкой летательного аппарата. Поэтому измерительные задачи в смысле компромисса ограничены необходимым минимумом. До сих пор контроль проводится все еще с земли путем обхода систем линий персоналом или путем объезда соответствующими транспортными средствами. Недостаток таких систем в том, что проводимая таким образом инспекция требует очень много времени. Электроэнергия передается во все большем объеме на большие расстояния, так что инспекция путем обхода даже за счет использования наземных транспортных средств является многообещающей лишь в ограниченной степени.
Обычно контроль наземных и подземных энергетических трасс уже много лет проводится путем их облета, например, вертолетом. Помимо пилота, который летит по маршруту, заданному поставщиком энергии и который обычно предоставляется пилоту в бумажном виде, на борту находится также обученный для выполнения таких задач сотрудник поставщика энергии, эксплуатирующего ЛЭП. При этом проводятся визуальные наблюдения, результаты которых, как правило, вручную вносятся в имеющиеся документы, так что позднее на основании плана облета трассы можно соответствующим образом обработать полученную информацию, чтобы можно было провести ремонтные работы или принять прочие меры по профилактическому ремонту. Обнаруженные визуально повреждения вносятся в эти списки после полета, который из-за длины ЛЭП или подземных энергетических трасс должен осуществляться также в несколько этапов при соответствующей ночевке в разных местах. При этом используются, например, таблицы Excel, которые сохраняются соответственно в виде PDF-данных. Полученный так называемый отчет сдачи-приемки (Hand-Over-Report) предоставляется в распоряжение заказчику, в данном случае поставщику энергии. Даже если на борту можно использовать все больше измерительной техники, во время осуществляемых до сих пор инспекционных полетов, в используемом вертолете не предусмотрен собственный компьютер для выполнения других задач, нежели сохранение данных, полученных, главным образом, визуально. Таким образом, эти «исконные» системы и способы контроля энергетических трасс и при этом, в частности, ЛЭП ни в коем случае не отвечают все более возрастающим требованиям к постоянному и как можно более бесперебойному энергоснабжению.
По опыту заявителя, наиболее распространена практика, при которой для инспекции ЛЭП посредством вертолета облетаемые участки ЛЭП передаются пилоту в бумажном виде, причем собственно инспекция ЛЭП во время облета производится соответственно обученными, находящимися на борту специалистами лишь визуально, в крайнем случае, дополнительно используются тепловые камеры. Полученные данные вносятся находящимся на борту специалистом в протокол и в качестве результата предоставляются в распоряжение поставщику энергии, который осуществляет соответствующую оценку для принятия мер по ремонту или обслуживанию. Следовательно, работы проводятся в максимальной степени на основе составленных вручную протоколов в бумажном виде или в виде калькуляционных таблиц. После соответствующей оценки, например на специальных встречах со всеми участниками, согласуются, как правило, дополнительные облеты, или устанавливаются задачи по ремонту и обслуживанию, которые соответственно выполняются. Аналогичным образом действуют в случае подземных энергетических трасс, при этом визуальное распознавание повреждений или дефектов играет второстепенную роль.
Инспекция ЛЭП имеет огромное значение, т.к. обусловленные повреждениями выходы из строя могут привести к прерыванию электроснабжения в различных сферах и, тем самым, к его перебоям, которые могут вызвать даже угрожающие жизни людей состояния, например прерывание электроснабжения в больницах, а также энергоснабжения компьютеризированных систем управления устройствами и процессами, проникших сегодня почти во все сферы жизни людей. В принципе, электроснабжение должно обеспечивать безопасность населения и экономики. К тому же прерывание электроснабжения в более крупных областях может привести также к большим проблемам с высоким потенциалом опасности на электростанциях из-за неотбора вырабатываемого там тока. Поэтому для поддержания комплексной инфраструктуры народного хозяйства, в частности стратегически важной инфраструктуры, крайне важно, чтобы такие системы энергоснабжения функционировали на 100%. При этом надежность систем контроля в рамках так называемой безопасности мощности играет центральную роль.
В WO 2012/087387 А2 описаны тепловые измерения ЛЭП, например из транспортного средства или летательного аппарата, записывающего данные лазерного сканирования, посредством которых создаются трехмерные структуры земли и прочие структуры, включая проведение измерений расстояния от проводов до растительности. Следовательно, посредством сканирования осуществляется изображение земной поверхности в окружении ЛЭП. Посредством тепловизионной камеры осуществляется исключительно обнаружение повреждений проводов. Непосредственный поиск повреждений ЛЭП, включающей в себя, разумеется, также опоры и изоляторы, как и получение данных изображений, так же мало описаны, как и обнаружение повреждений именно опор и изоляторов. Этот известный способ не отвечает требованиям по эффективному получению всеобъемлющих данных при умеренных затратах на облеты.
В US 4818990 описана система контроля с использованием дрона с дистанционным управлением. С помощью этого известного дрона совершается лишь облет ЛЭП, причем измерения земной поверхности не проводятся. Описанный в этой известной системе облет ЛЭП обеспечивает, однако, лишь в сильно ограниченной степени контроль фазных проводов. При необходимости, пришлось бы совершить несколько облетов с соответственно разной измерительной техникой, что противоречит эффективному использованию летательных аппаратов. Правда, здесь описано, что имеется компьютер для управления полетом, что электронные датчики определяют нагрузку летательного аппарата и что могут использоваться электромагнитные и электростатические полевые датчики, акустические датчики коронного разряда и ультрафиолетовые датчики, как и инфракрасные тепловизоры и видеокамеры, однако вся информация не привязана к месту и не связана между собой, так что для обеспечения высокой надежности результатов требуемые большие массивы данных обработать невозможно. Проведенные измерения земной поверхности дают информацию о необходимости, например, воспрепятствования росту растений в направлении проводов. Объединение полученных данных, автоматическая оценка с выдачей вероятностей выхода из строя, а также требуемых ремонта и устранения потенциальных мест дефектов не описаны. Существенный недостаток известной системы в том, что полученные данные должны передаваться с дрона на движущееся следом наземное транспортное средство, т.к. нагрузочная способность дрона очень ограничена.
В US 2020/0074176 А1 описан способ контроля состояния ЛЭП. В этой известной системе описаны, правда, камеры, однако они установлены неподвижно без возможности поворота. Они не достигают требуемого разрешения менее нескольких сантиметров, которые были бы необходимы для измерения начинающихся изменений поверхности. Дополнительная система датчиков для потенциально угрожающих системе мест используется только для получения обзорных данных. В общем, в этой известной системе с помощью летательного аппарата совершается облет ЛЭП, а полет в зоне фазных проводов, т.е. полет рядом с фазными проводами, не описан и не возможен из-за ориентации камер только вниз. Напротив, для получения надежного объема данных и повышения их точности при необходимой поддержке с земли, будь то с помощью транспортного средства или находящейся вблизи летательного аппарата наземной станции, требуется, по меньшей мере, один второй полет в направлении, встречном первому направлению полета и съемки. Правда, цель известного способа заключается в том, чтобы автоматически обрабатывать полученные данные посредством подходящего программного обеспечения, однако для этого данные необходимым образом передаются на движущееся следом транспортное средство, на котором расположена соответствующая компьютерная техника. Правда, для этого несколькими камерами можно было бы оборудовать вертолет, чтобы полностью визуально охватить, например, опору. Однако это оказывается недостатком из-за ограниченной загрузки требуемого аппаратного обеспечения в вертолет, тем более в дрон. По этой причине предложено использовать по меньшей мере два транспортных средства, а именно одно транспортное средство, содержащее лазерный сканер и обзорную камеру, и второе транспортное средство или второе наземное транспортное средство, на котором или в котором установлена камера для детальной съемки. Только отказавшись от обзорной камеры, можно использовать в вертолете лазерное сканирование и создающую изображения деталей камеру для данных изображений. Базовой ориентацией для описанного в US 2020/0074176 А1 способа является использование двух транспортных средств, т.е. в случае вертолета необходимо совершить по меньшей мере два облета ЛЭП, а именно одного летательного аппарата, посредством которого сначала получают лишь обзорные данные, и второго летательного аппарата, в котором установлена камера для съемки деталей.
В US 7298869 В1 описана система сбора данных, используемая предпочтительно в самолете. С ее помощью скрытые или подземные аномалии должны идентифицироваться и так фильтроваться, чтобы получить трехмерное цифровое изображение облетаемой поверхности. Система обслуживается пилотом, причем спутниковые системы навигации используются только для временного соотнесения позиционных данных. В принципе, пилот должен вмешиваться в сбор данных измерений. Надземные структуры, такие как ЛЭП, не описаны. Правда, для осуществления известного способа прибегают к данным GPS и используют систему лазерного сканирования для контроля подземных трубопроводов, однако всеобъемлющая, реализующая и обрабатывающая большой объем данных система сбора данных измерений невозможна уже по той причине, что в качестве самолета используется сверхлегкий самолет, у которого нагрузка измерительной техники с самого начала сильно ограничена в отношении массы. Известная система сбора данных служит для получения трехмерной информации о топографии земной поверхности, причем наличие двух магнетометров позволяет определять линии, расположенные под землей. В принципе, летательный аппарат должен быть связан с наземными или водными транспортными средствами, чтобы получить надежную информацию. Для определения аномалий подземных линий совершается облет на постоянной высоте (высоте над уровнем моря) зоны их прокладки. Определение структур, таких как ЛЭП, их токопроводящих линий и закрепленных на них или соединенных с ними элементов, не описаны в этом документе предшествующего уровня техники.
В US 2005/0007450 А1 описаны система и способ получения и обработки физических данных, которые получают посредством различных приборов для их сбора и которые могут быть установлены на транспортном средстве, например вертолете. Система сбора данных предусмотрена для того, чтобы отображать расположенные на земле объекты, включая токопроводы, например, посредством вертолета, который летит вдоль ЛЭП и в котором размещены приборы для сбора данных. Используя систему GPS, полученным данным присваивают координаты места. Правда, получают информацию о дефектах также проводов и закрепленных на них или соединенных с ними элементов, однако качества и детальной достоверности полученных измеренных данных недостаточно, чтобы получить детальные указания по содержанию в исправности или ремонту с установлением точного места. Известная система сбора данных работает с так называемыми NVOF-датчиками, которые используются лишь для съемки определенных точек под узким углом наблюдения. Кроме того, для обработки изображений применяются так называемые приборы LIDAR/LADAR, которые используются для измерения расстояний, но обеспечивают лишь ограниченное число точек на квадратный метр, например 25 точек на квадратный метр. Эти системы требуются для высокого и плотного потока данных, например 1500 точек на квадратный метр. В этом плане также система GPS не подходит для обеспечения соответствующей плотности данных в отношении привязки к месту и/или положению. Указание на то, чтобы получать все требуемые данные за один облет, в этой известной системе не упомянуто. Отсутствует также какое-либо указание на то, что рекомендации по инспекции и/или ремонту идентифицируются и выдаются.
В US 2019/0364387 А1 описан дрон, посредством которого определяются данные о дефектах надземных систем, например токопроводящих линий. Недостаток этой известной системы в том, что предписано обязательное использование дронов, что с самого начала ограничивает нагрузку, с одной стороны, и дальность действия, с другой стороны. Только с большими и плотными потоками данных, которые требуются для точного определения повреждений ЛЭП, включая локально точно установленные рекомендации по ремонту и содержанию в исправности, можно получить требуемую информацию о состоянии ЛЭП без привлечения дополнительного персонала. Дальность действия дрона указывается, например, всего лишь в 20 км. Поскольку высоковольтные ЛЭП простираются нередко на сотни километров, использование дронов целесообразно и возможно лишь в ограниченном локальном окружении. Прежде всего, из-за ограниченной нагрузки рекомендуется облетать контролируемые трассы несколько раз, чтобы получить соответствующие точные и надежные данные. Кроме того, получаемые с помощью дрона лишь в ограниченном объеме данные требуют последующей обработки специалистом.
Наконец в DE 102015013550 А1 описана система управления автономно летающими дронами. Эта известная система управления направлена на то, чтобы возникающие при облете данные использовать с поддержкой в отношении их обработки. Ограниченно возможный объем данных обеспечивает тогда лишь первичную оценку состояния инспектированного объекта, а также лишь первичную классификацию. Обеспечивающая высокое разрешение система лазерного сканирования, выдача рекомендаций по инспектированию и вероятностей выхода из строя, корреляция данных с привязкой к месту и времени не описаны, напротив, указывается на то, что требуются несколько облетов дронами, имеющими ограниченную дальность действия.
В противоположность этому, задача изобретения заключается в том, чтобы выполнять основные измерительные задачи по всеобъемлющему контролю ЛЭП, т.е. энергетических трасс, посредством единственного облета пилотируемым летательным аппаратом, который оборудован необходимой для этого измерительной техникой, так чтобы посредством этой измерительной системы можно было c небольшими расходами получать изображения возможных мест повреждений с высоким разрешением в отношении структуры местности, а также конструкции контролируемой ЛЭП. При этом условия соответствующего измерения должны выбираться так, чтобы можно было согласовать между собой обычно взаимоисключающие условия полета для выполнения различных измерительных задач и надежно выполнять все измерительные задачи посредством лишь одного облета, например, на оптимальной для всех измерительных задач высоте на одной скорости. Кроме того, следует избегать трудоемкого построения контрольных точек для привязки данных лазерного сканирования, как это необходимо делать в уровне техники. За счет одноразового облета должны в значительной степени достигаться улучшения экологического баланса, например сокращение выбросов СО2 и уменьшение других вредных воздействий на окружающую среду.
Эта задача решается посредством способа с признаками п. 1 и летательного аппарата с признаками п. 16 формулы. Предпочтительные варианты осуществления изобретения охарактеризованы в соответствующих зависимых пунктах формулы.
Заявленный способ предназначен для контроля эксплуатационных состояний, конструкции линии, безопасности линий, а также для определения вероятностей выхода из строя систем ЛЭП, т.е. надземных линий энергоснабжения. Под конструкцией линий здесь следует понимать конструктивно-техническое выполнение контролируемых систем в отношении, например, проводов, кабелей с пластиковой оболочкой, опор, изоляторов, траверс, трансформаторов, трансформаторных подстанций, предохранительных систем, маркировок и т.д. Контроль происходит с воздуха летательным аппаратом. Используемый для осуществления способа летательный аппарат в виде вертолета содержит систему датчиков, которая собирает данные физических свойств контролируемых систем, т.е. ЛЭП, по меньшей мере, одну цифровую камеру высокого разрешения для получения данных изображений имеющихся вокруг ЛЭП растительности и построек и мобильных структур, например строительных машин, и лазерный сканер с высоким разрешением для сбора данных об окружающих ЛЭП условиях. Под высоким разрешением здесь следует понимать систему с 100-1500 пикселей/м2. Это представляет собой всеобъемлющее оснащение проводящего контроль эксплуатационных состояний летательного аппарата, поскольку можно превентивно определять, а также локально конкретно и точно сопоставлять не только повреждения контролируемых систем, но и начинающиеся ухудшения состояний проводов, изоляторов или других частей контролируемых систем. Кроме того, можно включить сюда окружающие условия, которые могут привести также к выходу из строя ЛЭП, если, например, растущие деревья или кустарники проникнут в зону проводов или если, например, возникнут повреждения несущих провода опор, например также начинающиеся коррозионные повреждения. Полученные для этого данные вводятся в блок обработки, сравниваются там с хранящимися в базах данных моделями роста растительности и учитываются для выдачи рекомендаций по ремонту и содержанию в исправности.
Чтобы осуществить соответствующее соотнесение данных, полученных с помощью различных систем сбора данных, система датчиков, включающая предпочтительно также датчики положения, цифровая камера и лазерный сканер связаны между собой и со спутниковыми системами навигации, за исключением GPS. Это позволяет точно определить и локализовать имеющиеся или начинающиеся повреждения контролируемых систем, благодаря чему могут выдаваться, например поставщику энергии, соответствующие рекомендации по ремонту и/или содержанию в исправности без необходимости внесения в списки предварительно вручную выявленных данных. Собранные данные могут быть, следовательно, с привязкой к месту и времени соотнесены и коррелированы между собой. Согласно изобретению, летательный аппарат на основе заданного профиля полета лишь за единственный облет ЛЭП выявляет все собираемые предусмотренной измерительной техникой и необходимые данные, которые требуются, чтобы с детальной точностью выдавать рекомендации по содержанию в исправности и/или ремонту отдельных элементов, участков или зон контролируемых систем. Собранные данные подаются на блок обработки, в котором на основе сравнения, например, с заданными состояниями контролируемых систем, например моделями роста растительности, хранящимися в базах данных, выявляются и на блок выдачи выдаются необходимые сведения по ремонту и/или содержанию в исправности, рекомендации и вероятности выхода из строя при начинающихся повреждениях. Блоком выдачи может быть предпочтительно электронное устройство отображения.
Предпочтительно система датчиков выполнена так, что посредством тепловых камер, тепловых датчиков и/или тепловых сканеров можно проводить также тепловые измерения, такие как ультрафиолетовые и инфракрасные измерения. С помощью этих измерений, например, можно установить дефекты токопроводящих частей, которые еще не привели к полному выходу из строя, однако уже привели к ухудшению физических, токопроводящих свойств.
Предпочтительно полученные в блоке обработки рекомендации по ремонту и/или содержанию в исправности и/или вероятности выхода из строя и/или рекомендации по обеспечению безопасности, которые в качестве функции полученных данных сохраняются в базе данных, вводятся в эту базу данных и привлекаются для последующих сравнений, так что в результате текущей эксплуатации возникает, так сказать, самообучающаяся система.
Предпочтительно цифровая камера высокого разрешения имеет минимальное разрешение 25-350 мегапикселей и содержит датчик изображения, по меньшей мере, 24×36 мм или, по меньшей мере, один средне- или полноформатный датчик. Чтобы с помощью этой цифровой камеры высокого разрешения получать высокоточные данные, она имеет гармонизирующую двойную механическую или электронную или электронно-механическую стабилизацию изображений соответственно в самой камере или в объективе. Таким образом, даже при неспокойном полете можно посредством цифровой камеры передавать в систему обработки детально обрабатываемые фото с высоким разрешением. Предпочтительно система датчиков закреплена также стабилизирующим образом.
Существенное преимущество изобретения заключается, прежде всего, в том, что многократные облеты в уровне техники объединяются в единственный полет, т.е. в единственный облет, и, что используемая техника для сбора данных может быть объединена и связана между собой. Применяемый при известных облетах способ визуальной инспекции автоматизируется за счет разработки соответствующего профиля полета, согласно изобретению. Посредством находящегося на борту компьютера, в котором полученные от соответствующих измерительных систем данные связываются между собой, данные обычно требуемых трех разных облетов могут быть соответственно обработаны при фактически лишь единственном полете. Обработка полученных данных, хранящихся в базе данных, создает основу для соответствующих оценки и описания проводимого рабочего процесса ремонта или содержания в исправности или характера непрерывных мероприятий по обслуживанию линий, с одной стороны, и образует, с другой стороны, также основу того, что проводимые мероприятия контролируются в том отношении, выполнена ли выданная программа контроля или выполнены ли выданные рекомендации по ремонту или содержанию в исправности в полном объеме. Также в этом отношении важно, что полученные в результате облета данные снова вводятся в систему, с тем чтобы составление рекомендаций по ремонту или содержанию в исправности для требуемых для ремонта рабочих процессов можно было указать детально и проверить их выполнение.
За счет того, что различные задачи инспекции и измерений объединены так, что они за единственный облет дают в полном объеме все требуемые данные или всю требуемую информацию, достигается заметное повышение эффективности по сравнению с прежними известными способами, при которых требуются несколько облетов, при необходимости, несколькими летательными аппаратами. Предпочтительно на борту летательного аппарата, т.е. вертолета, например для контроля выполняемых во время облета измерений, находятся соответственно обученный специалист поставщика энергии и специалист по эксплуатации или контролю или настройке и фокусировке измерительно-съемочного оборудования, т.е. сенсорной системы, камер и системы лазерного сканирования (система LIDAR высокого разрешения) высокого разрешения.
Системы контроля системы датчиков и система LIDAR высокого разрешения установлены предпочтительно в кабине вертолета. Дополнительно имеются рабочее место для обученного специалиста с соответствующим рабочим столом, компьютерная техника и либо автоматическая, либо ручная, предпочтительно беззеркальная цифровая камера.
В качестве существенной основной предпосылки для очень детальных и содержащих большое число информационных данных снимков камерой последняя имеет разрешение, по меньшей мере, от 25 до максимум 350 мегапикселей. Однако решающим для качества съемки дефектов, повреждений или различных, контролируемых поставщиком энергии происшествий является оснащение цифровой камеры гармонизирующей двойной стабилизацией изображений как для камеры, так и для объектива, а именно механической или электрической или электромеханической. Предпочтительно цифровая камера имеет автофокус (АФ) <0,11 секунд в режиме фазового АФ. В качестве минимальных свойств эта цифровая камера содержит предпочтительно датчик, по меньшей мере, 24×36 мм или, по меньшей мере, один средне- или полноформатный датчик. Дополнительно камера содержит предпочтительно WLAN, Bluetooth или NFC-интерфейс связи. Это требуется в зависимости от места использования и включения цифровой камеры в общую систему измерения для общего контроля. Достигнутые на основе измерений и полученных данных рекомендации по ремонту и/или содержанию в исправности детально выдаются, так что, например, для ремонтируемого конструктивного элемента точнейшим образом определены даже затраты труда или затраты на содержание в исправности. После ремонта необходимо, разумеется, произвести последующий контроль фактически выполненных работ на линиях. Это может осуществляться традиционным образом путем совместных рабочих совещаний с заказчиком. Разумеется, это может быть осуществлено также путем соответствующего сравнения с фактической ситуацией данных о предварительно выявленной ситуации с повреждениями и после ремонта.
Нередко требуется также, в частности в случае ЛЭП, контролировать колебания тока. Они включаются в общий сбор данных и служат также для корректной оценки состояния ЛЭП. Также эти данные собираются за единственный облет, записываются, добавляются к остальным данным и соответственно коррелируются с ними. В частности, это относится к повреждениям, которые оказывают непосредственное влияние на колебание энергоснабжения или потока тока в соответствующем проводе.
Предпочтительно в заявленном способе может происходить либо запись данных полностью в находящемся на борту компьютере, либо передача данных на наземную станцию или самому поставщику энергии, а именно предпочтительно передача данных в реальном времени посредством спутникового телефона или мобильной радиосвязи. Если передача данных происходит поставщику энергии или заказчику, то она включает в себя предпочтительно также все обнаруженные дефекты или повреждения, связанные с соответствующими позиционными данными и данными изображений, причем предпочтительно в блоке обработки содержится рейтинг тяжести происшествия. За счет этого поставщик энергии непосредственно, предпочтительно на своем рабочем месте в своем офисе, получает в реальном времени информацию о том, где, с какими затратами, какими силами и с какой техникой должны проводиться ремонтные работы, а именно целесообразно до того, как возникнут перебои в энергоснабжении и/или будет нарушена безопасность линии. Прежде всего, профилактическое устранение намечающихся повреждений, согласно изобретению, гарантирует надежное энергоснабжение.
Предпочтительно лазерный сканер, камера или камеры и система датчиков связаны с универсальной измерительной антенной, посредством которой принимаются собранные сигналы спутниковой системы навигации. Затем происходит разложение составных сигналов на требуемые для соответствующего процесса обработки сигнальные данные. Например, соответствующий сигнал спутниковой системы навигации может быть разделен, в том числе, на так называемые L1- и L2-сигналы или на требуемое разложение сигналов, или получен из имеющегося состава. Нормальная передача происходит в виде L1-сигнала, тогда как предусмотренный для L2 канал может быть включен в процесс получения данных и их передачи в качестве используемого, главным образом, военными диапазона передачи, а также при соответствующих разрешении и согласовании. Важным для всеобъемлющих сбора и обработки связанных между собой данных является то, что вся система датчиков, система лазерного сканирования и камера или камеры используют одни и те же данные одной отдельной измерительной антенны. При использовании единственного кожуха для системы датчиков, системы лазерного сканирования и камер обеспечивается то, что все три базовые системы используют одинаковый инерциальный навигационный блок или сенсорный блок положения, который непрерывно взаимодействует со спутниковыми сигналами в компьютерной системе. Установленное программное обеспечение одновременно управляет в свободном режиме всей системой датчиков для полной регистрации всех повреждений, дефектов и происшествий. Оно также самостоятельно подстраивается, чтобы гарантировать всегда максимально возможную точность измерений.
Для удовлетворения особенно высоких требований к данным измерений могут использоваться специальные камеры, содержащие сверхбольшой датчик, состоящий из нескольких, объединенных в один блок средне- и полноформатных датчиков.
Для достижения высокой точности полученных данных лазерный сканер высокого разрешения собирает данные на полной окружности в 360° по вертикали, создавая, таким образом, 3D-изображение токо- или материалопроводящей инфраструктуры с точностью в миллиметровом диапазоне. Также эти данные связаны с системой датчиков и камерами. Предпочтительно данные изображений создаются четырьмя цифровыми камерами, которые размещены в летательном аппарате так, что данные изображений могут сниматься в направлении полета наискось вперед, назад и по одному разу вниз в направлении земли. За счет поддержки цифровыми камерами достигается точность в отношении разрешения данных для определения фактических расстояний или минимальных расстояний, например, до растительности, зданий, насыпей, других пересекающих ЛЭП, структур местности, изображения проводов ЛЭП, изменений структурной целостности всей архитектуры ЛЭП, включая трансформаторные подстанции или генерирующую или преобразовательную инфраструктуру с точностью до 0,7 см на пиксель.
Для сбора данных о контроле эксплуатационных состояний ЛЭП летательный аппарат летит со скоростью полета предпочтительно 0-60 км/ч. Благодаря этому становится ясно, что для выполнения различных задач контроля возникают зоны перекрытия, в пределах которых, при необходимости, обе задачи могут выполняться одновременно. Существенным преимуществом изобретения является, в том числе, то, что в соответствии с выбранной скоростью полета для контролируемых систем все задачи измерения и сбора данных могут выполняться на одной и той же скорости полета при одном и том же облете и данные соответственно могут обрабатываться уже на месте в вертолете или, при необходимости, также в вычислительном центре на земле. Разумеется, скорость полета можно варьировать в зависимости от требуемых параметров, а именно в соответственно указанном диапазоне. Скорость полета также во время соответствующего облета или соответствующей инспекции в целях более близкой визуальной инспекции может изменять находящееся на борту лицо, т.е. обученный специалист, а также, например, для более точного обнаружения инфракрасных, тепловых особенностей и особенностей коронного разряда, бросающихся в глаза. Изменяемая скорость полета и отчасти требуемая смена стороны наблюдения летательным аппаратом необходимы для изменяющихся условий контроля и могут быть вполне реализованы системой без необходимости дополнительных облетов.
Предпочтительно летательный аппарат летит на высоте ЛЭП и при этом сбоку от направления ее прохождения на расстоянии 1-50 м. Это имеет то преимущество, что можно лететь довольно близко от инспектируемых систем и, тем самым, дополнительно повысить точность данных. При соблюдении правил работы на или вблизи ЛЭП, а также токораспределительной и преобразующей напряжение инфраструктуры соблюдаемое минимальное расстояние при среднем напряжении составляет 1 м, а при высоком (>60-200 кВ) и сверхвысоком (>200 кВ) – в большинстве случаев, по меньшей мере, 5 м.
За счет постоянной записи лазерных данных и самостоятельного соотнесения последовательности данных без их сдвига или смещения можно во время полета с помощью всех включенных систем и визуально инспектирующего специалиста произвольно менять положение на контролируемой ЛЭП, так что можно не только однозначно устанавливать дефекты, повреждения и соответствующие состояния проводов или всей структуры проводов, но и локально однозначно соотносить их. За счет этого заявленный способ является крайне вариабельным. Реализующий способ летательный аппарат, т.е. вертолет, не требуется переделывать, и все измерительные задачи, релевантные для возможного ремонта или содержания в исправности контролируемой системы, могут выполняться без необходимости переделки вертолета.
Предпочтительно летательный аппарат, прежде всего, в случае, когда, например, фундаменты опор должны инспектироваться в отношении эксплуатационных состояний и вероятностей выхода из строя, содержит дополнительно радарную систему, которая аналогичным образом согласована с другими измерительно-контрольными системами для всеобъемлющей и локально однозначно сопоставляемой обработки и связана с ними с возможностью передачи данных или сигналов.
Предпочтительно в используемый для осуществления способа вертолет интегрирована измерительная аппаратура, к которой подключена дополнительная система датчиков для обнаружения вызывающих помехи в электромагнитном поле повреждений и/или дефектов ЛЭП. Система датчиков для токопроводящих линий подает, следовательно, на измерительную аппаратуру колебания электромагнитного поля, характеризующие помехи.
Предпочтительно для этого используется селективный радиометр, чтобы измерять эти колебания электромагнитных полей, характеризующие помехи.
Предпочтительно повреждения и/или дефекты измеряются тепловыми, ИК-, датчиками коронного разряда или датчиками дневного света или тепловыми сканерами, причем далее предпочтительно неполадки и/или дефекты ЛЭП регистрируются как помехи или изменения в электромагнитном поле посредством антенн или антенных пучков и записываются. При этом помеховый сигнал отслеживается антеннами или антенными пучками автоматически в горизонтальном и/или вертикальном направлении.
Далее предпочтительно помехи или изменения в электромагнитном поле, причиной которых в конечном счете являются дефекты или повреждения проводов, могут быть сделаны слышимыми с помощью измерительной аппаратуры и видимыми на отображающем элементе. Следовательно, можно изобразить зарегистрированные помехи непосредственно на соответствующих отображающих элементах, соответственно подготовить в вычислительном блоке и передать в протокол измерений, из которого помехи могут быть не только обозначены, но и с соответствующим соотнесением с местом своего возникновения и, тем самым, их более быстрым устранением предоставлены в распоряжение обрабатывающим этот протокол ответственным сотрудникам.
Следовательно, в конечном счете речь идет об интеграции в летательный аппарат дополнительной системы датчиков, которая питает измерительную аппаратуру сигналами, чтобы определить дополнительные источники повреждений и повысить точность обнаружения повреждений проводов в измеренном визуально не видимом спектре длин волн.
Везде там, где вырабатывается, передается и используется электричество, на токопроводящих частях или вокруг них возникают электрические или магнитные поля. Чем выше сила тока и напряжение и чем меньше расстояние измерительного прибора или системы датчиков до токопроводящих элементов, тем больше соответствующая напряженность поля. Самые большие или самые сильные нагрузки возникают в области электроснабжения в непосредственной близости от трансформаторных станций или подстанций, а также в случае линий среднего, высокого и сверхвысокого напряжений. Если речь идет об измерении электромагнитных или электрических и магнитных полей, то они при эксплуатации токопроводящего оборудования испытывают колебания в случае наличия в оборудовании ухудшения качества, дефектов или даже мест повреждений.
С помощью используемой измерительной техники также с учетом частоты могут измеряться передаваемое переменное напряжение и направляемые по линии количества тока. Определение этих данных измерений служит для выявления повреждений или дефектов в оборудовании для передачи тока, которые в конечном счете приводят к снижению их к.п.д. и дополнительным потерям. Можно сделать видимыми дефекты или повреждения посредством УФ-камер (коронный разряд) или ИК-камер. Тем самым, эти дефекты визуально изображаются из невидимой области в видимой области и могут быть, таким образом, задокументированы. С помощью соответствующих блоков обработки можно также сделать слышимыми эти колебания электромагнитных полей. Интенсивность измеренного сигнала уменьшается по мере увеличения расстояния до проводов, причем измеренные сигналы могут быть, кроме того, различным образом искажены, демпфированы, ослаблены, а в определенных условиях вполне также усилены.
На основе физического принципа считается, что напряженность электрического поля уменьшается по мере увеличения расстояния от токопроводящих линий. Так, например, напряженность поля на удалении до 40 м от линии может быть измерена и локализована, а именно в 10 μТл, а на удалении до 20 м магнитное поле имеет напряженность 10-100 μТл. Разумеется, электрические поля напряженностью в несколько тысяч В/м измеряются в отношении измерительных сигналов легче и интенсивнее, что справедливо даже для проложенных в земле линий в отношении определения мест повреждений, причем в отношении измерения проводится предпочтительно частотно-селективное измерение.
Хорошие результаты измерений достигаются, например, также за счет того, что в летательном аппарате установлен, например, селективный радиометр предпочтительно в комбинации с тепловым сканером, датчиками тепловым, ИК-, коронного разряда или датчиками дневного света. Тем самым, можно очень точно определить места повреждений, например для соединителей, зажимов, повреждения проводов, проходов проводов на изолирующих подвесках. Даже в заземляющих проводах и световодах в крайних точках, например на вершинах траверс или опор, возможно определение колебаний электромагнитных волн для обнаружения повреждений. Для регистрации таких помех в электромагнитном поле служат антенны или антенные пучки, которые выполнены предпочтительно в виде направленных антенн и во время инспекционного полета оптимально направлены на исследуемые провода, при этом записывают, в частности, их повреждения и подают на находящийся на борту летательного аппарата вычислительный блок. Характеристика направленности антенны или антенного пучка обеспечивает тогда точную идентификацию повреждения и, тем самым, определение фактического места повреждения, включая имеющийся там источник повреждения, например части провода.
Предпочтительно антенны снабжены автоматическим поиском направления, так что возможно отслеживание помехового сигнала в горизонтальном и вертикальном направлениях. Это предотвращает обрыв пеленга во время инспекционного полета. Далее предусмотрена предпочтительно связь с сигналом GNSS (глобальная навигационная спутниковая система), которая обеспечивает соотнесение со стороной света при пеленге, временной информацией и координатами для последующей обработки данных, а также соотнесение с другими данными, полученными от системы датчиков и/или в результате визуальной инспекции. Отражающие соответствующие неполадки сигналы сохраняются точно по месту и высоте относительно плана трассы линии. Сигналы служат также для поддержки сделанных видимыми УФ-камерой (камерой коронного разряда) повреждений или дефектов проводов или их деталей, так что этим можно почти исключить или значительно уменьшить ошибочную интерпретацию измеренного в УФ-диапазоне повреждения. Измерительная аппаратура регистрирует на незакрепленных деталях имеющиеся там повреждения путем определения помеховой частоты, которая возникает в результате треска или шума. Дополнительно, если поврежденное место провода, имеет, например, повышенное сопротивление и в связи с этим высвобождает тепло, предпочтительно тепловые ИК-датчики могут сделать видимыми эти поврежденные места и подтвердить соответствующий источник помеховой частоты на проводе. Тем самым, возможно так называемое резервирование зарегистрированных неполадок.
В равной мере с помощью установленных в летательном аппарате измерительных систем или имеющейся в нем измерительной аппаратуры могут быть проверены проложенные в земле сильноточные линии, т.е. подземные энергетические трассы. Дефектные или поврежденные провода проложенных в земле сильноточных линий проверяются и определяются аналогичным описанному выше образом. Тем самым, возможна локализация соответствующего дефекта или места повреждения.
Если, например, подземные энергетические трассы имеют дефекты из-за движений земли или повреждений сверху, то с помощью измерительной аппаратуры измеряется соответствующая помеховая частота, причем имеющееся, как правило, в месте повреждения сопротивление в потоке тока поддерживающим образом делается видимым за счет имеющихся в летательном аппарате тепловых ИК-датчиков и записывается. Использование теплового сканера также или же дополнительно возможно.
С помощью заявленной измерительной аппаратуры или оборудованного этой измерительной аппаратурой летательного аппарата и способом, осуществляемым заявленным летательным аппаратом, локализуются также полностью порванные линии, что происходит за счет того, что грунт при порванной линии имеет иную проводимость, которая подтверждается также изменением растительности на ней или окружающей среды. Выявленные места повреждений могут быть аналогичным образом сделаны слышимыми, а с помощью отображающего элемента – видимыми. В свою очередь, все полученные данные предпочтительно автоматически связываются с сигналом GNSS, т.е. поддерживаемым спутниками сигналом. Дополнительно предпочтительно посредством дальномера и определения угла УФ- и ИК-камер может происходить точное определение места и положения дефекта или места повреждения. Предпочтительно используется тепловой сканер, посредством которого можно отсканировать больший по сравнению с традиционными тепловыми камерами угловой диапазон и больший диапазон длин волн. Это целесообразно, прежде всего, в случае проложенных под землей энергетических трасс, фактическое место прокладки которых при случае точно не известно.
Предпочтительно используемая система LIDAR высокого разрешения регистрирует в зоне мест повреждений неравномерности за счет своей высокой плотности точек в диапазоне 1500 пикселей/м2, которые тогда могут быть соответственно хорошо видимыми и которые можно задокументировать.
Выявленные неисправности или неисправные состояния оцениваются в блоке на основе компьютера либо уже на борту, либо в соответствующих вычислительных установках на земле записываются посредством передачи в реальном времени с помощью различных передающих возможностей на основе радио.
Согласно другому аспекту изобретения, используемый для осуществления способа летательный аппарат содержит систему датчиков для регистрации дефектов, повреждений, эксплуатационных состояний и состояний материалов ЛЭП, несколько цифровых камер высокого разрешения для данных изображений систем и систему лазерного сканирования высокого разрешения на и/или в нем. Система датчиков, цифровые камеры и система лазерного сканирования размещены в монтажных блоках, причем внутри в летательном аппарате предусмотрен компьютер, посредством которого полученные от блоков три измеренных и/или инспекционных данных коррелируются между собой, затем данные обрабатываются, и определяются соответствующие рекомендации по необходимому или предстоящему ремонту и/или содержанию в исправности, которые подаются на блок выдачи.
Предпочтительно измерительная техника содержит систему датчиков с УФ- и ИК-датчиками, а также датчиками положения, несколько цифровых камер высокого разрешения, предпочтительно беззеркальных, с минимальным разрешением 25-350 мегапикселей с механической или электрической или электромеханической стабилизацией как камеры, так и объектива, а также лазерный сканер высокого разрешения с полной окружностью в 360° по вертикали. Полученные данные подаются на компьютер и соответственно коррелируются в нем, так что все данные связаны между собой, и возможно однозначное соотнесение происшествия или случая повреждения. Предпочтительно система датчиков и лазерный сканер связаны с универсальной измерительной антенной, посредством которой принимаются полученные составные сигналы спутниковой системы навигации, и после приема происходит их разложение на требуемые для соответствующего процесса обработки сигнальные данные. Предпочтительно сигналы GPS разделяются на L1 и L2. При этом L1 используется, главным образом, в гражданском диапазоне, тогда как L2 обычно закреплен за военным диапазоном, а в случае соответствующих соглашений или договоров используется также для решаемых, согласно изобретению, задач. Предпочтительно, например для инспекции фундаментов опор, в летательный аппарат дополнительно встраивается радарная система, посредством которой в смысле наземного радара могут соответственно контролироваться находящиеся в земле фундаменты.
Предпочтительно летательным аппаратом является пилотируемый винтокрыл, в частности вертолет. Посредством протекающих в компьютере процессов управления полетом все данные собираются, сводятся и обрабатываются. На основе сведенных и коррелированных между собой данных происходит оценка последующих фактических работ по обслуживанию проложенных на земле или под землей энергетических трасс, включая их окружение, причем рекомендации по соответствующим работам по обслуживанию могут выдаваться сразу же и непосредственно. К ЛЭП относятся, разумеется, также соответствующие несущие, анкерные или портальные опоры, а также трансформаторные подстанции. Полученные лазерным сканером данные с разрешением до 1500 точек или пикселей на квадратный метр создают возможность детально записать структуру линии, например опор и трансформаторных подстанций, в отношении их характера и габаритов и для точного расчета в миллиметровом диапазоне определить расстояния до отдельных узлов опоры или конструктивных элементов трансформаторных подстанций. Существенное преимущество этой всеобъемлющей записи возникает из плотности формированных лазерных точек. За счет этого всю структуру ЛЭП и трансформаторных подстанций, а также вырабатывающей ток и преобразующей напряжение инфраструктуры можно в 3D-виде с высоким разрешением поворачивать во вcех направлениях и рассматривать. Из точного до миллиметра измерения конструктивных элементов ЛЭП и/или расстояний между ними и/или поворотов можно определить изменения изгибающих моментов конструкции опор за счет влияний окружающей среды и/или механических влияний. Благодаря этому высокому разрешению данных, по сути, возможно также точное до миллиметра определение положения мест расположения опор. В рамках облета инспектируемой ЛЭП можно посредством дополнительной ИФ- или тепловой камеры или теплового сканера определить также провис фазных проводов при различных окружающих температурах на основе измеренной во время полета температуры проводов и соответственно оценить для поставщика энергии. При этом измерении температуры измерение температуры проводов происходит именно от ближайших к земле фазных проводов при взгляде с вертолета в небо, чтобы исключить колебания температуры фона, которые возникли бы, если бы, например, измерение происходило против земли. При измерении против неба или космического пространства имеет место высокое постоянство температурного излучения из космического пространства.
При инспекции фундаментов опор ЛЭП работа производится предпочтительно с помощью наземного радара, тепловых сканеров, мультиспектральных сканеров и подобных технических приборов, причем они дополнительно установлены в или на летательном аппарате.
Передача, в частности, данных изображений с вертолета, например поставщику энергии, может происходить при этом в реальном времени, так что находящийся на борту инспектор поставщика энергии может оказывать прямое влияние на обнаружение неисправностей. При этом вертолет может летать в местах, где прежде были обнаружены неисправности, повреждения или дефекты. Соответствующие ультразвуковые датчики и лазерные дальномеры гарантируют, чтобы соблюдалось минимальное расстояние до ЛЭП 5 метров. Если данные обрабатываются не в установленном на борту компьютере, а посылаются на наземную станцию, то, тем не менее, облетаемый таким вертолетом за один облет отрезок имеет почти произвольную длину.
Чтобы можно было во время инспекционных полетов регистрировать, в частности, места повреждений и дефекты проводов, заявленный летательный аппарат содержит, следовательно, дополнительную систему датчиков, питающую измерительное устройство или измерительную аппаратуру, которая посредством аудиоустройства может сделать слышимыми и/или посредством отображающего устройства видимыми имеющиеся на линии, будь то надземная или проложенная в земле линия, неисправности, повреждения и/или дефекты, которые приводят к измеряемым соответствующим помехам в электромагнитном поле. В блоке обработки записываются эти данные, из которых затем может быть отображен или распечатан инспекционный протокол с непосредственным указанием неисправностей или дефектов и степени повреждения, так что на основе имеющего такие неисправности инспекционного протокола можно непосредственно распорядиться о проведении соответствующего ремонта.
Согласно изобретению, созданы, таким образом, способ и летательный аппарат, которые служат для контроля и координации мер по обслуживанию ЛЭП на основе всеобъемлющих данных, полученных за единственный облет.
Другие преимущества, подробности и возможности применения данного изобретения детально поясняются с помощью прилагаемых чертежей, на которых:
- фиг. 1: принципиальный вид опоры линии электропередачи на местности с вертолетом для визуально проводимой инспекции, согласно уровню техники;
- фиг. 2: наземная опора с вертолетом для проведения инспекции посредством лазерного сканирования, согласно уровню техники;
- фиг. 3: наземная опора с вертолетом для инспекции посредством системы датчиков, согласно уровню техники;
- фиг. 4: наземная опора в упрощенном виде с оборудованным системой датчиков, камерами и системой лазерного сканирования вертолетом для комбинированной инспекции за единственный облет, согласно изобретению;
- фиг. 5: принципиальный вид летательного аппарата, оборудованного системой датчиков, несколькими камерами высокого разрешения и системой лазерного сканирования, в качестве заявленного вертолета для осуществления заявленного способа;
- фиг. 6: принципиальная блок-схема комбинированной инспекции воздушной линии электрической сети за единственный облет, согласно изобретению.
На фиг. 1 в упрощенном виде на местности изображена опора 2 для ЛЭП, у которой посредством вертолета 1 проводится визуальная инспекция. Она проводится известным образом за счет того, что посредством летательного аппарата в виде вертолета 1 в зоне опоры 2 посредством камер (не показаны) проводится визуальная инспекция проводов 4, закрепленных на соответствующих траверсах 3 опоры 2 посредством изоляторов 5, и посредством нескольких камер снимаются изображения в соответствующих направлениях 9 измерения и съемки. Опора 2 стоит на открытой местности на земле 6, а летательный аппарат 1 облетает растительность 7 и постройки 8 на высоте траверс 3 опоры 2, а именно сбоку от них. Помимо пилота, на борту находится сотрудник поставщика энергии или уполномоченный им специалист, вручную управляющий камерами, которые снимают различные элементы, такие как опора, изоляторы 5, провода 4, структура 6 местности, включая растительность 7 и постройки 8. Во время известных визуальных инспекционных полетов снимающий соответствующие изображения, находящийся на борту инспектор должен вручную заносить в перечень места, в которых он сделал соответствующие фото, если камеры неспособны одновременно сохранять данные с привязкой к месту. Из этого известного способа визуальной инспекции становится понятно, что такой специальный облет совершается только для получения данных изображений.
Это означает, однако, что для выполнения других задач по сбору данных требуются дополнительные облеты. Так, на фиг. 2 изображена известная из уровня техники ситуация, при которой вертолет оборудован системой лазерного сканирования, а именно в данном случае системой LIDAR, и на заметной высоте на опорой 2 производит лазерное сканирование зоны наземной опоры 2 с включением растительности 7 и/или имеющейся, при случае, постройки 8, а также самой опоры 2 с ее траверсами 3, закрепленными на них изоляторами 5 и подвешенными на них проводами 4 за счет того, что система лазерного сканирования направляется вниз и создает направление 10 измерения или съемки. Летательный аппарат 1 или вертолет облетает линию со скоростью 35-80 км/ч на относительно большой высоте, до 200 м выше максимальной высоты опор или проводов 4. Из этого видно, что у этой известной системы для получения данных лазерного сканирования приходится соблюдать и использовать иные условия полета во время облета, нежели это требуется для визуальной инспекции посредством камер на фиг. 1, при которой пилот ведет вертолет сбоку от траверс опор 2, с тем чтобы инспектор мог сделать камерами соответствующие снимки состояния или имеющих повреждения элементов или частей ЛЭП.
На фиг. 3 изображена ситуация при другом отдельном облете ЛЭП летательным аппаратом 1 в виде вертолета 1. Опора 2 со своими траверсами 3, на которых показаны изоляторы 5 с подвешенными на них проводами 4, изображена в упрощенном виде на земле 6. Вертолет 1 оборудован системой 14 датчиков, содержащей УФ-, ИК-, RGB-, тепловые датчики, датчики положения и датчики коронного разряда. Показано направление 11 съемки для измерения указанными датчиками установленной в летательном аппарате 1 системы 14 датчиков. Иначе, нежели при проведении визуальной инспекции на фиг. 1, при которой летательный аппарат 1 в случае линий высокого напряжения летит сбоку от опор 2 на расстоянии 5-15 м, а в случае линий низкого напряжения – также сбоку от опор 2 на расстоянии 1,5 м, для совершения облета с целью проведения соответствующих измерений или съемок посредством установленной в летательном аппарате 1 системы 14 датчиков предусмотрено расстояние от снимаемого элемента ЛЭП в диапазоне 30-50 м, причем рабочий полет происходит в основном на одной и той же высоте в зоне верхней траверсы 3. Скорость полета для этого облета составляет 25-45 км/ч. Следствием различных облетов, совершаемых на фиг. 1-3 для различных ситуаций измерения и съемки, является то, что для получения всех необходимых данных для всеобъемлющей инспекции требуются, по меньшей мере, три облета. Это связано с огромными затратами и в значительной степени затрудняет корреляцию между собой полученных во время соответствующих облетов данных, так что, несмотря на относительно большие затраты дополнительного ручного труда, например составления таблиц Excel, корреляция полученных во время отдельных облетов данных возможна лишь ограниченно. Прежде всего, из различных условий соответствующих облетов на фиг. 1-3 становится ясно, что в отношении как расстояний, так и скоростей полета для получения отдельных данных измерений или съемки вряд ли существуют общие условия, так что, по сути, отдельные облеты с их отдельными измерительными задачами и соблюдаемые для этого условия исключают друг друга.
В противоположность этому, на фиг. 4, 5 изображены ситуация совершаемого для инспекции единственного облета с включением данных изображений высокого разрешения, лазерного сканирования высокого разрешения и соответствующей системы датчиков (фиг. 4), а также оснащенный соответствующим измерительно-съемочным оборудованием летательный аппарат 1 (фиг. 5), согласно изобретению. Вся система сбора и обработки данных выполнена так, что надежно и в кратчайшее время могут обрабатываться значительные объемы данных.
Изображенный на фиг. 4, заявленный комбинированный инспекционный облет токопроводящей линии в виде ЛЭП на местности совершается летательным аппаратом 1 в виде вертолета, в котором установлены и комбинированы между собой система LIDAR 12 высокого разрешения в виде системы лазерного сканирования, система 14 датчиков, содержащая УФ-, ИК-, RGB-, тепловые датчики, датчики положения и/или датчики коронного разряда, а также несколько закрепленных в разных местах летательного аппарата 1 камер 13 с высоким разрешением, которые могут собирать цифровые данные изображений, т.е. делать снимки, непосредственно вниз, а также в направлении полета вперед и назад. Кроме того, дополнительно возможно, чтобы находящийся на борту инспектор делал вручную фото выбранных мест, причем камеры или камера 13 могут быть направлены тогда на разные места в направлении 9 измерения/съемки. Также возможно, чтобы система 14 датчиков и камера были закреплены с противоположных сторон на нижней стороне вертолета 1. Это показано на фиг. 4 стрелкой, обозначающей зону днища вертолета 1 в виде отдельной части. Для измерений мест повреждений и дефектов проводов вертолет 1 содержит измерительную аппаратуру 32 с дополнительной системой 47 датчиков. При этом измеряются помехи в электромагнитном поле.
Заявленная система и осуществляемый заявленным летательным аппаратом 1 способ основаны, в принципе, на том, что все три измерительно-съемочных комплекса, т.е. камеры 13 высокого разрешения, система 14 датчиков и система LIDAR 12 высокого разрешения, т.е. система лазерного сканирования, связаны между собой, благодаря чему все данные коррелируются между собой и возможны однозначное пространственное положение и спецификация по месту. Используемая измерительно-съемочная техника, в частности система 14 датчиков и система лазерного сканирования 12, связаны через универсальную измерительную антенну со спутниковой системой навигации, так что полученные данные для используемого измерительно-съемочного оборудования могут использоваться при их соответствующем разделении для различных процессов.
Следовательно, происходит в самой значительной степени автоматический, комбинированный и полный контроль как эксплуатационных состояний, так и физических свойств и возникающих или начинающихся повреждений, которые в будущем могли бы привести с сбоям в электроснабжении. Это получение и сбор всех названных данных и информации приводит к профилактически ориентированному обслуживанию и содержанию в исправности, включая немедленное проведение необходимых ремонтных работ. Используемая система обрабатывает данные таким образом, что конкретные рекомендации к действию, интервалы времени, в которые должны проводиться определенные ремонтные работы или корректировки, и передает эту информацию на устройство отображения поставщику энергии или уполномоченной им фирме. При этом наборы данных и рекомендации к действию могут быть распечатаны или электронным путем переданы ответственным клиентам летного предприятия.
Вертолет 1 летит со скоростью 0-60 км/ч на расстоянии от препятствий в диапазоне 0-50 м на рабочей высоте, близкой к 0, т.е. в зоне земли до высоты опор. Измерительно-съемочная техника выполнена и согласована между собой так, что вертолет 1 может летать на определенной рабочей высоте, предпочтительно в зоне соответствующих траверс 3 сбоку от проводов и, тем самым, сбоку от опор 2 и, тем не менее, надежно выполнять все три принципиальные задачи измерения и съемки. У прежних известных систем это было невозможно посредством единственного облета. Под облетом в связи с лежащим здесь в основе объектом имеется в виду полет в одном направлении, но не подразумевается проведение измерений или съемок при полете в прямом и обратном направлениях. Полет в прямом и обратном направлениях приравнивается, как правило, к двум облетам. В уровне техники неизвестно выполнение все трех задач измерения и съемки за единственный облет и размещение блока обработки данных в виде компьютера с соответствующим блоком обработки в единственном летательном аппарате 1, предпочтительно вертолете.
На фиг. 5 изображен заявленный летательный аппарат 1, в котором установлена описанная система 14 датчиков для выполнения всех задач по измерению и регистрации. Система 14 датчиков, содержащая УФ-, ИК-, RGB-, тепловые датчики, датчики положения и датчики коронного разряда, а также камеры и система LIDAR высокого разрешения размещены в шарообразном кожухе, который выполнен с возможностью свободного вращения, т.е. по вертикали и горизонтали, и к тому же имеет полнокарданную и гиростабилизированную подвеску. Из-за ограниченной нагрузки существенной предпосылкой является то, чтобы вся измерительная техника, регистрирующее устройство и устройство обработки данных были достаточно легкими и небольшими и чтобы все это можно было не только без проблем разместить в летательном аппарате 1, но и расположить и сориентировать так, чтобы все задачи по измерению и регистрации можно было выполнить с помощью системы 14 датчиков, камер 13 и системы лазерного сканирования 12 и чтобы за счет одновременного расположения системы обработки данных внутри летательного аппарата 1 все данные, полученные с помощью трех названных измерительно-регистрирующих комплексов, могли быть коррелированы между собой. Благодаря этому полученные данные обеспечивают не только обзор возможного обслуживания, проводимых ремонтных работ или имеющихся или начинающихся повреждений, но и записываются в соответствующую базу данных. За счет этого для будущих облетов с целью инспекции, обслуживания и ремонта создается все возрастающий набор данных, который позволяет получить из выявленных данных точные, надежные и соответствующие фактическим условиям сравнительные данные.
В передней части летательного аппарата 1 расположена система лазерного сканирования 12, так называемая система LIDAR высокого разрешения, которая в направлении 10 измерения/регистрации осуществляет лазерное сканирование. В летательном аппарате 1 расположены далее четыре камеры 13 К1-К4, которые имеют соответствующие конусообразные зоны охвата в соответствующем направлении съемки. Для этого камеры К1-К4 расположены в передней части летательного аппарата 1 и направлены, в основном, вертикально вниз в направлении земли 6. Камера К3 направлена в направлении 15 полета вперед, а камера К4 – в направлении 15 полета назад.
На нижней стороне летательного аппарата 1 расположена система 14 датчиков, содержащая УФ-, ИК-, RGB- и, по меньшей мере, также датчики коронного разряда. Датчики расположены с возможностью поворота так, что диапазон 16 поворота системы 14 датчиков обеспечивает схематически показанный соответствующий охват измерений.
Наконец на фиг. 6 изображена блок-схема, из которой видны отдельные составные части и этапы получения данных посредством трех измерительно-съемочных устройств для всеобъемлющего контроля ЛЭП, включая систему менеджмента надежности.
Этап 17 контроля и менеджмента надежности ЛЭП (PliMaRM) включает в себя последующие, покрывающие всю заявленную систему этапы или комплексы. Сначала составляется обзор (GOver) 18 энергетической сети. Основой инспекции является информация для пилота от давшего поручение поставщика энергии, который должен инспектировать свои сети. Для этого проводятся первые переговоры с поставщиком энергии, чтобы выяснить, чего он ожидает в качестве цели инспекции.
В рамках так называемой организации (GOrg) 19 энергетической сети составляется информация в отношении структуры и организации давшего поручение поставщика энергии, чтобы установить места непосредственной связи с осуществляющим облет по поручению поставщика энергии летным предприятием. При этом определяется и осуществляющему облет летному предприятию передается разбивка или информационный конволют, например в отношении так называемых мест отчета, т.е. ответственных мест у поставщика энергии, в которых должны передаваться полученные в результате облета данные. Сюда входит также обзор того, кто от кого получает данные. Сюда входит также, какие соответствующие разрешения должны даваться относительно использования данных. В этот комплекс интегрирована также система извещения в случае серьезных происшествий, т.е. для проведения обязательно необходимых ремонтных работ, поэтому должны быть даны соответствующие разрешения на проведение работ на ЛЭП или вблизи них и трансформаторных подстанций.
В рамках последующего комплекса обслуживания (GServ) 20 энергетической сети готовится обзор сети давшего поручение поставщика энергии, чтобы можно было назначить особые места для инспекции. Сюда входит то, должна ли проводиться инспекция только основной сети или также линий, относящихся к основной сети, включая особенно проложенные участки сети. Дополнительно сюда входит назначение проведения инспекции при особенно высокой плотности происшествий с повреждениями. Особенно в случае последних требуется, чтобы, прежде всего, эти участки линий инспектировались особенно интенсивно и всей имеющейся измерительной техникой, так что могут автоматически выдаваться соответствующие рекомендации к действию. В рамках этого рабочего комплекса также предусмотрено и необходимо снабдить находящуюся на борту инспекционную команду соответствующими полномочиями в поручении поставщика энергии и дать также соответствующие права на разрешение или рабочие права для поставщика энергии. В рамках тесного взаимодействия между давшим поручение поставщиком энергии и осуществляющим облет летным предприятием соответственно обучается собственный персонал для выполнения работ на или вблизи ЛЭП с целью инспекции ЛЭП любого уровня напряжения. Такие модули интегрированы в систему обработки данных. Сюда входят обнаружение неисправностей или установление дефектов, типы техники отдельных элементов (например, вид опор, трансформаторных подстанций, трансформаторов, изоляторов, подвесок, размещения, соединителей и т.д.). В смысле эффективной подготовки к проводимой инспекции сюда входят также обучение инспекционной команды в отношении структуры всей энергосети, ее функций, используемой техники для соответствующих элементов, возможных сценариев и вероятностей выхода из строя, а также влияние передачи энергии на население, хозяйство, окружающую среду и на встроенную в летательный аппарат, т.е. в вертолет, электронику. Последнее имеет значение, прежде всего, потому, что в зависимости от вида инспекции, внешних влияний при инспекции никогда не следует исключать негативного влияния на восприимчивую электронику в вертолете. К обучению инспекционной команды относится также структура инспекционного программного обеспечения, включая его применение и возможные дополнительные модули для других, пока еще отсутствующих в инспекционном программном обеспечении функций и задач проводимых измерений или проводимой инспекции. Это значит, что в случае отсутствующих или, при случае, не имеющихся в распоряжении в данный момент данных при подготовке и, прежде всего, также во время облета может и должна осуществляться соответствующая адаптация изменяющихся условий к программному обеспечению и обрабатывающей электронике.
На следующем этапе 21, который называется «подготовка» (Prep), для подготовки и передачи требуемых данных инспектируемой ЛЭП в электронный блок обработки, т.е. компьютер, вводятся, а именно ЛЭП, которая подлежит инспекции и контролю, в соответствии с поручением поставщика энергии. Для этого вводятся данные относительно мест расположения опор, трансформаторных подстанций, типы опор, их конструктивные формы, различные уровни напряжения, также соответствующие согласования собственности и аналогичные вещи, так что во время облета соответствующая основа и соотнесение полученных данных с фактически стоящими в поручении на инспекцию сетями или участками сетей стоят. Если дефекты или повреждения или касающиеся их происшествия уже известны, например от прежних облетов, то устанавливается степень их тяжести и также вводится в систему обработки данных или определяется ею. Устанавливаются также принципиальные затраты труда для устранения этих названных дефектов, что вводится в систему обработки данных и записывается там в рамках памяти, чтобы это для будущих оценок образовало основу данных. В частности, в рамках этого этапа производится первичная оценка полученных знаний на основе предположений и имеющихся прежде в распоряжении данных. Это существенно способствует эффективному совершению соответствующего облета.
Лишь после выполнения этих принципиальных подготовленных работ осуществляется контроль линии (Pline) 22 в рамках собственно летной операции, т.е. облета, с соответственно возникающей в результате облета последовательностью инспекций. Сюда входят наблюдение за ЛЭП, документирование дефектов, повреждений или происшествий, причем оценка тяжести установленного происшествия устанавливается также автоматически с помощью устройства обработки данных, т.е. дополнительно находящегося на борту компьютера.
В соответствии с тяжестью происшествия система обработки немедленно выдает сообщение в случае тяжелых повреждений или происшествий в виде передачи и выдачи изображений, видео и т.д. Во-первых, за счет этого поставщик энергии может непосредственно получать информацию о том, что при отклонении осуществленного на этапе 21 процесса облета возможно целенаправленное управление местом с повреждением, которое следует немедленно устранить, так что при содействии или также существенной ответственности летного экипажа возможно немедленное вмешательство. Немедленными вмешательствами в смысле предотвращения опасных ситуаций на земле была бы, например, передача информации в соответствующие места, например для прекращения работ на стройплощадках в зоне безопасности ЛЭП, если, например, также установлено, что в зоне поворота или в рабочей зоне кранов или экскаваторов не обеспечены соблюдаемые безопасные расстояния. Такие релевантные данные передаются в реальном времени напрямую за счет предварительного автоматического выявления давшему поручение поставщику энергии.
Как описано выше, этап контроля ЛЭП может осуществляться с отклонением от заданного профиля полета; однако, как правило, если происшествия с тяжелыми повреждениями отсутствуют, облет совершается с подготовленным на этапе 21 профилем полета. Во время облета ЛЭП контролируется, как правило, с помощью всей установленной на борту измерительной техники измерительно-технически, видеотехнически и т.д., причем в системе в любое время происходит соотнесение полученных данных с соответствующими местами. Весь блок данных содержит тогда всю информацию, чтобы планировать проведение работ по ремонту, обслуживанию или замене деталей, причем система выполнена так, что такие работы автоматически передаются на устройство выдачи в отношении объема и заменяемых или обновляемых деталей без необходимости проведения крупных встреч участвующих отделов и сотрудников поставщика энергии.
На следующем этапе 23 обработки данных (DP) происходит дальнейшая обработка данных после инспекционных полетов на основе инспекций, проведенных системой датчиков, лазерным сканером, цифровыми камерами светового поля, а также на основе визуально установленных помех. Во время обработки данных происходит корреляция между данными, полученными из отдельных систем датчиков или измерительных систем. Сюда входит создание цифровых высотных моделей земного рельефа либо с растительностью и зданиями, либо без растительности и зданий, а именно с очень высокой точностью измерений. В результате производится 3D-моделирование всей техники ЛЭП, так что могут быть включены последующие измерения расстояний в пределах техники ЛЭП или, например, деформации опор и траверс, как и другие, обусловленные нагрузками деформации конструктивных элементов ЛЭП в качестве основы всеобъемлющей, детальной и надежной обработки.
В качестве следующего этапа 24 осуществляется анализ данных (DA). На этом этапе полученные данные анализируются, происходит окончательная оценка в смысле расширения первичного анализа во время инспекции, причем производится обработка данных лазера с включением следующих подэтапов:
а) После соответствующих заданий, данных поручающим инспекцию поставщиком энергии, в отношении вида растительности, анализа роста в зоне безопасности ЛЭП, а также в отношении расстояний от препятствий под и рядом с ЛЭП, безопасных расстояний до земли относительно сельскохозяйственных аспектов, таких, например, как конструктивная высота сельскохозяйственных машин, определяется созданное облако точек.
b) Осуществляется измерение изменения техники ЛЭП или всей системы проводов в отношении деформаций, например кручения, вызванных внешними влияниями, такими как погода, деформации земли, снеговая нагрузка и т.д.
c) Осуществляется также расчет различных нагрузочных состояний ЛЭП при различных окружающих температурах, а именно с помощью данных лазера и измеренных во время полета боковых температур, причем оба результата измерений коррелируются между собой и ограничиваются соответствующим локальным отношением.
d) Кроме того, в расчет включается влияние растительности под и рядом с ЛЭП на безопасность проводов и на окружающую среду.
На основе этого всеобъемлющего набора данных, который возникает из результатов измерений, результатов расчета и результатов корреляции, для всех зарегистрированных и вычисленных повреждений, неисправностей или результатов составляются объемы работ и их последовательность, а также требуемые для ремонта затраты на материалы, требуемые затраты на машины, число мест ремонта и затраты труда на содержание в исправности или обслуживание, передаются на устройство выдачи на основе набора данных и отображаются. Кроме того, для подготовки к проведению требуемых работ по ремонту и содержанию в исправности на устройство выдачи могут быть переданы и там даны также соответствующие поручения на выполнение заданий по обслуживанию посторонними фирмами.
Этап 24 анализа данных включает в себя анализ энергетической сети (GA) 31. Для этого используются полученные данные, содержимое основанных на знаниях баз данных, отчеты о контроле, отчеты о статусе, ежегодный аудит и результат сетевых измерений.
На основе этих дополнительных и обширных источников данных с помощью блока расчета, т.е. имеющегося компьютера, составляется рекомендация по сети, включая рекомендации по сервису, и передается на блок выдачи. Кроме того, сюда входит информация о рентабельности или к.п.д. передачи тока по контролируемой сети. С помощью различных данных и источников данных на устройство выдачи передается и на нем выдается также надежность сети. Все имеющиеся данные, включая имеющиеся в базах данных, основанные на знаниях объемы данных, используются для повышения качества эксплуатации сетей, причем эти данные могут найти применение также для эффективного планирования сетей в смысле прогнозирования их нагрузки.
За этапом 24 анализа данных следует этап 25 назначения встречи (DM), включающий в себя встречу с давшим поручение предприятием-поставщиком энергии, на которой отображаются полученные и обработанные данные, передаваемые в цифровом виде в нужном предприятию-поставщику энергии формате. Сюда входит передача данных в систему программного обеспечения и компьютер предприятия-поставщика энергии.
На этапе 26 пакета мер (РМ) осуществляется установление мер по обслуживанию, содержанию в исправности или изменениям с указанием соответствующего времени запланированного принятия мер. Рекомендации по принятию мер фиксируются в передаваемом окончательном результате и основаны на всем полученном конволюте данных.
На этапе 27 продолжительности устранения неисправностей или желаемой временной цели (RP) поставщиком энергии на основе обработанных и обсужденных на встрече данных анализируются, окончательно устанавливаются и принимаются меры, которые служат для устранения неисправностей или восстановления прохождения тока по соответствующим проводам. Это представляет собой важное мероприятие для обратной связи предприятия-поставщика энергии с осуществляющим облет летным предприятием, благодаря чему в тесном согласии между собой могут быть оптимизированы затраты на облет и, тем самым, расходы на содержание в исправности.
За этапом 27 следует этап 28 определения статуса активности обслуживания энергетической сети (SSNWart). На этом этапе происходит информирование предприятием-поставщиком энергии осуществляющего облет летного предприятия об уровне мер по обслуживанию и содержанию в исправности, а также о строительстве и, при необходимости, осуществляемой реконструкции ЛЭП. Для этого соответствующая информация и подготовка к вводу обработанных данных из протоколов в смысле активного следования осуществляемым мерам в компьютерную систему передаются осуществляющему облет летному предприятию.
Следующим этапом является этап 29 определения статуса контрольного полета (SMF). С помощью информации о принимаемых мерах, которой на предыдущем этапе обменялись между собой предприятие-поставщик энергии и осуществляющее облет летное предприятие, на основе полученных результатов предшествующих процессов устанавливается, требуются ли новые инспекционные полеты. Это является дополнительным контролем и может, при необходимости, проявиться в принятии дополнительной инспекционной меры в виде дополнительного облета.
Наконец на завершающем этапе 30 всего процесса выполнения задач контроля и менеджмента надежности ЛЭП осуществляется аудит. В рамках этого аудита 30 происходит аудиторская проверка предприятия-поставщика энергии на основе всего предшествующего процесса, включая подготовку и проведение совершаемых, при необходимости, повторных облетов или инспекции других частей сети, которые еще не были учтены при первом облете, однако важны для общей оценки. В рамках аудита происходит встреча участвующих ответственных сотрудников, на которой определяются изменения существующего менеджмента безопасности и рисков или его расширения или их новой реализации.
Важным аспектом является постоянное продолжение, повышение или расширение качества сотрудников выполняющего облет летного предприятия, как и поставщика энергии, включая группы специалистов по содержанию в исправности, предоставляемые, при необходимости, посторонними фирмами, с помощью которых рассчитанные блоком обработки компьютерной системы и выданные на блок выдачи рекомендации. Со стороны выполняющего облет летного предприятия на основе обработки всего набора данных даются рекомендации и предложения по адаптации и усовершенствованию всей техники ЛЭП и дополнительной адаптации инспекционной техники. Это имеет то преимущество, что в рамках петли обратной связи существующие системы постоянно усовершенствуются автоматическим путем.
Помимо заметно более комплексного и более быстрого по сравнению с известными системами сбора данных, заявленные способ и летательный аппарат вносят значительный вклад в уменьшение вредных влияний на окружающую среду, например снижение выбросов СО2.
Перечень ссылочных позиций
1 – летательный аппарат/вертолет/винтокрыл
2 – опора
3 – траверса
4 – провод
5 – изолятор
6 – земля
7 – растительность
8 – строение
9 – направление измерения/съемки устройства/камеры
10 – направление измерения/съемки LIDAR
11 – направление измерения/съемки датчика: УФ-, ИК-, RGB-, теплового, коронного разряда, положения
12 – система LIDAR, лазерный сканер /система лазерного сканирования
13 – камера
14 – система датчиков: УФ-, ИК-, RGB-, тепловых, коронного разряда
15 – направление полета
16 – диапазон поворота системы датчиков
17 – контроль и менеджмент надежности ЛЭП (PliMaRM)
18 – обзор энергосети (GOver)
19 – организация энергосети (GOrg)
20 – обслуживание энергосети (GServ)
21 – подготовка (Prep)
22 – контроль ЛЭП (Pline)
23 – обработка данных (DP)
24 – анализ данных (DA)
25 – назначение встречи (DM)
26 – пакет мер (РМ)
27 – продолжительность устранения неисправностей/ желаемая временнáя цель (RP)
28 – статус активности обслуживания энергосети (SSNWart)
29 – статус контрольного полета (SMFI)
30 – аудит (А)
31 – анализ энергосети (GA)
32 – измерительная аппаратура
33 – дополнительная система датчиков
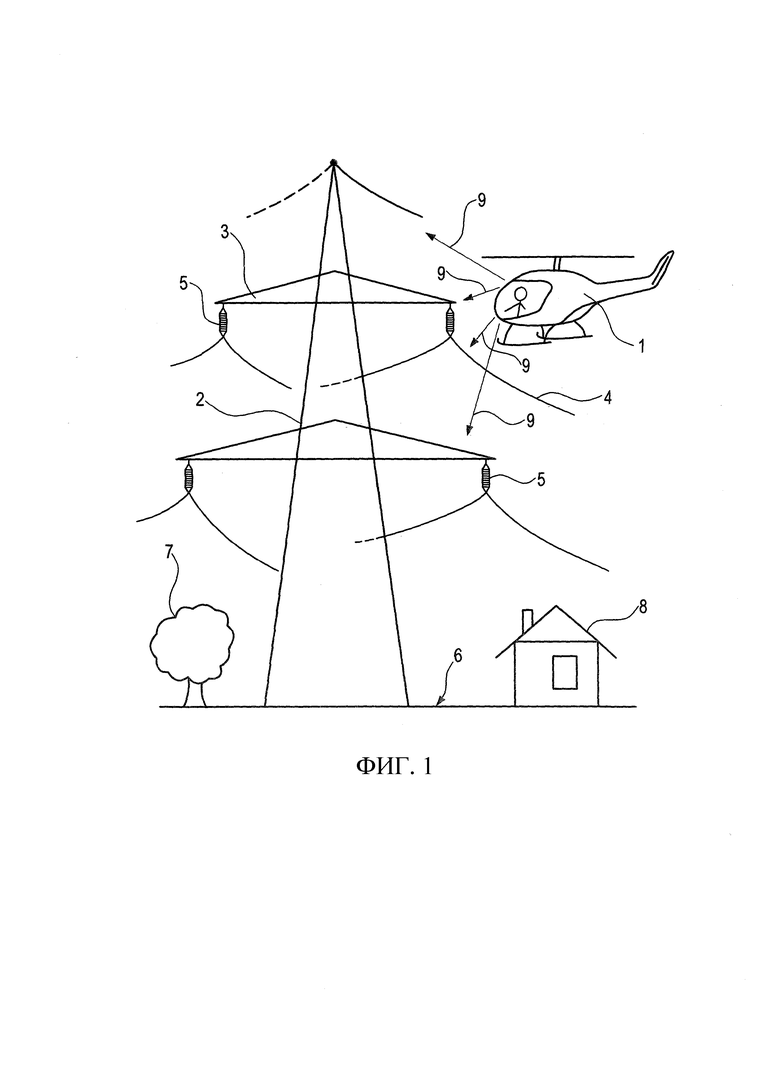
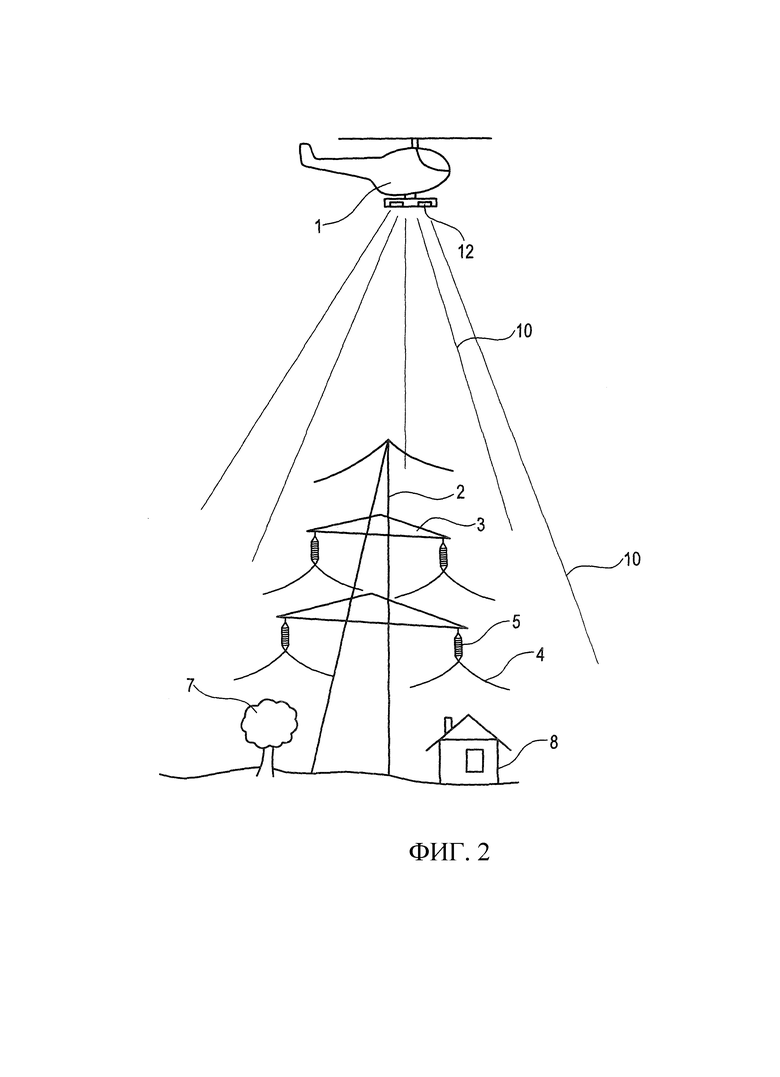
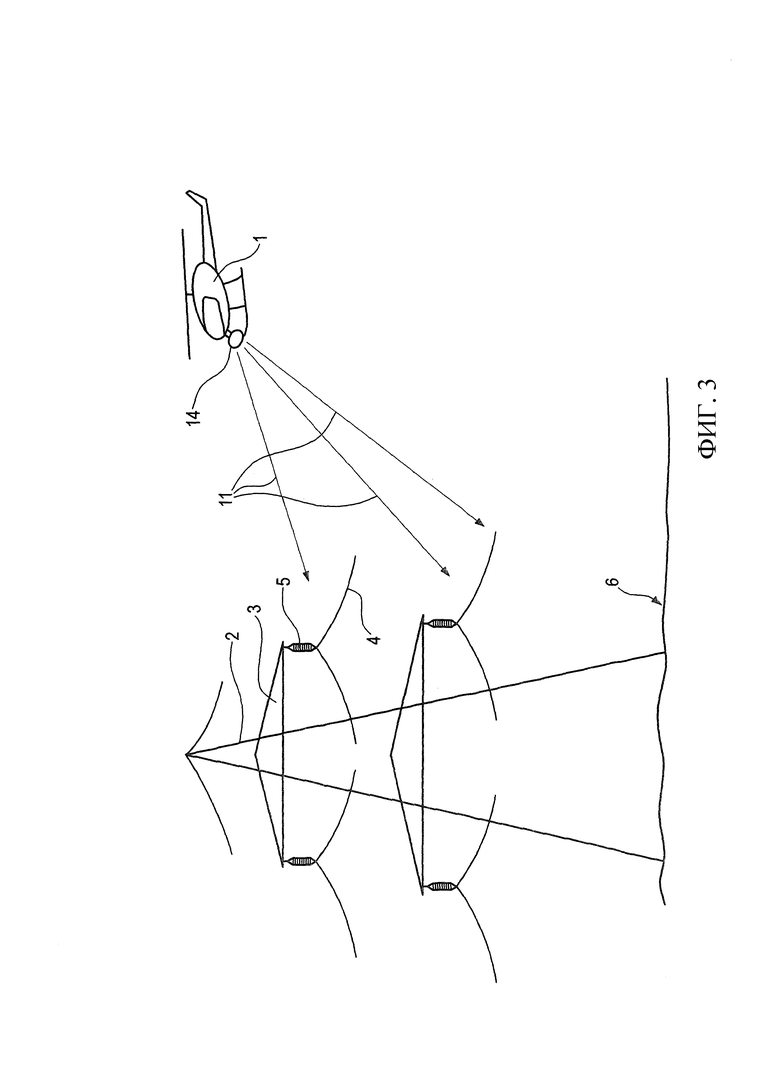
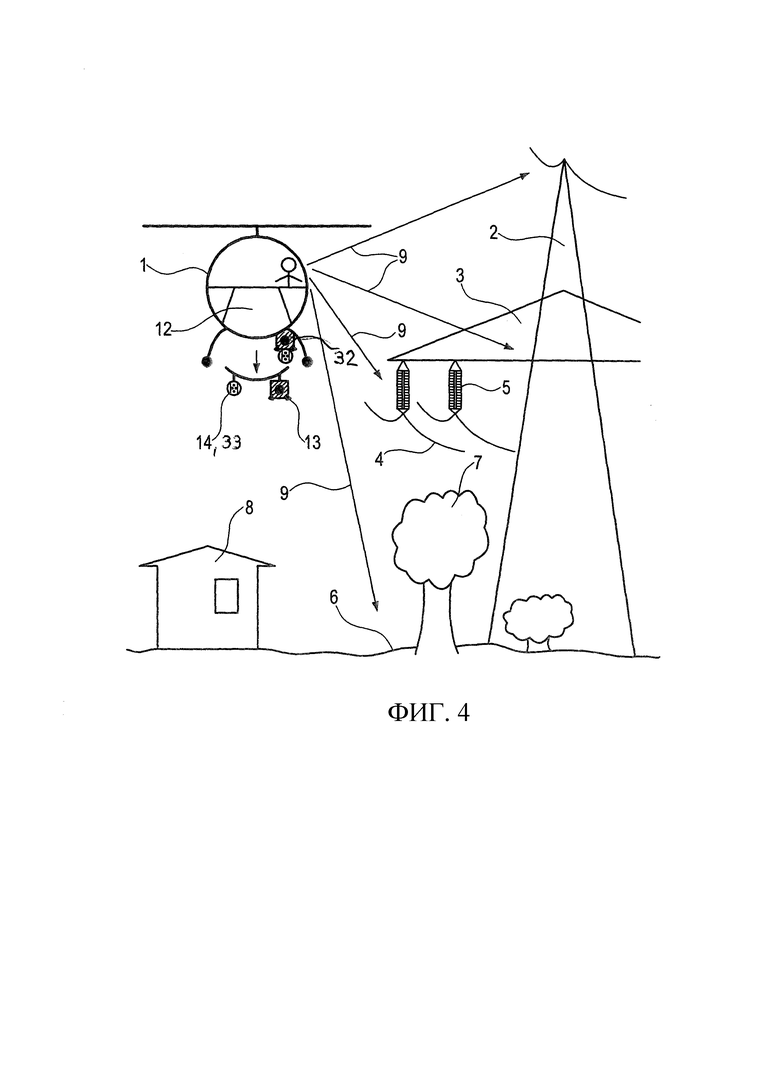
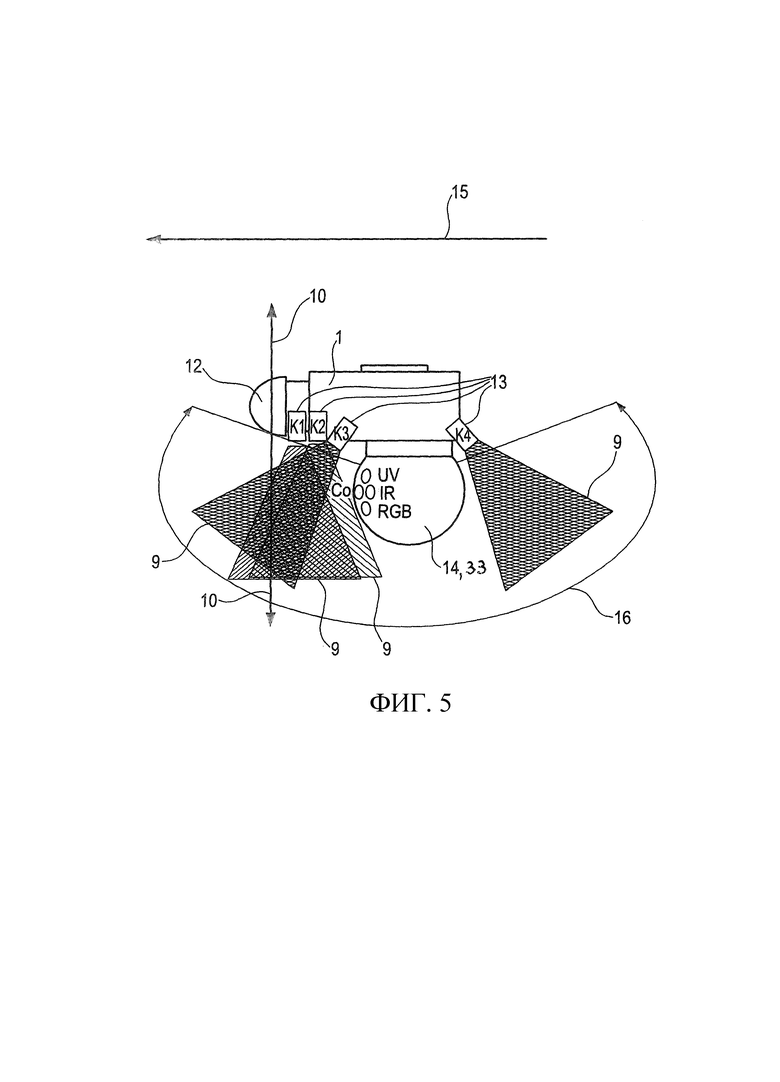
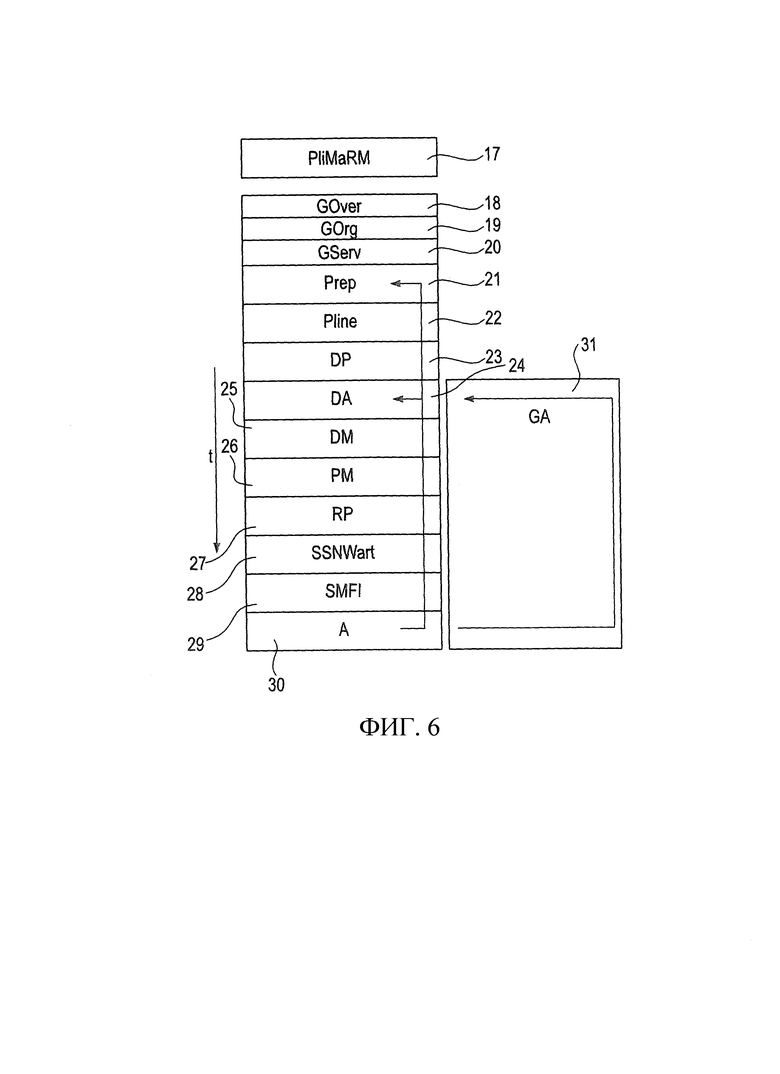
Использование: изобретение относится к способу и летательному аппарату для контроля эксплуатационного состояния и определения вероятности выхода из строя находящихся под напряжением систем линий электропередачи в виде систем воздушных линий электропередачи (ЛЭП). Сущность: летательный аппарат 1 в виде вертолета оборудуется системой 14 датчиков для измерения физических свойств воздушных линий электропередачи, а также цифровыми камерами 13 высокого разрешения для получения данных изображений и системой 12 лазерного сканирования высокого разрешения для регистрации условий окружающей среды. Система 14 датчиков, цифровые камеры 13 и система 12 лазерного сканирования связываются со спутниковыми системами навигации, за исключением GPS, причем собранные данные связывают друг с другом через привязку к месту и времени и коррелируют между собой. Контроль проводится за единственный облет летательным аппаратом 1 на основе заданного профиля полета, а полученные данные подают на блок обработки, который после соответствующей оценки непосредственно отображает или выдает на блок выдачи рекомендации о необходимом ремонте и/или сохранении работоспособности. 2 н. и 17 з.п. ф-лы, 6 ил.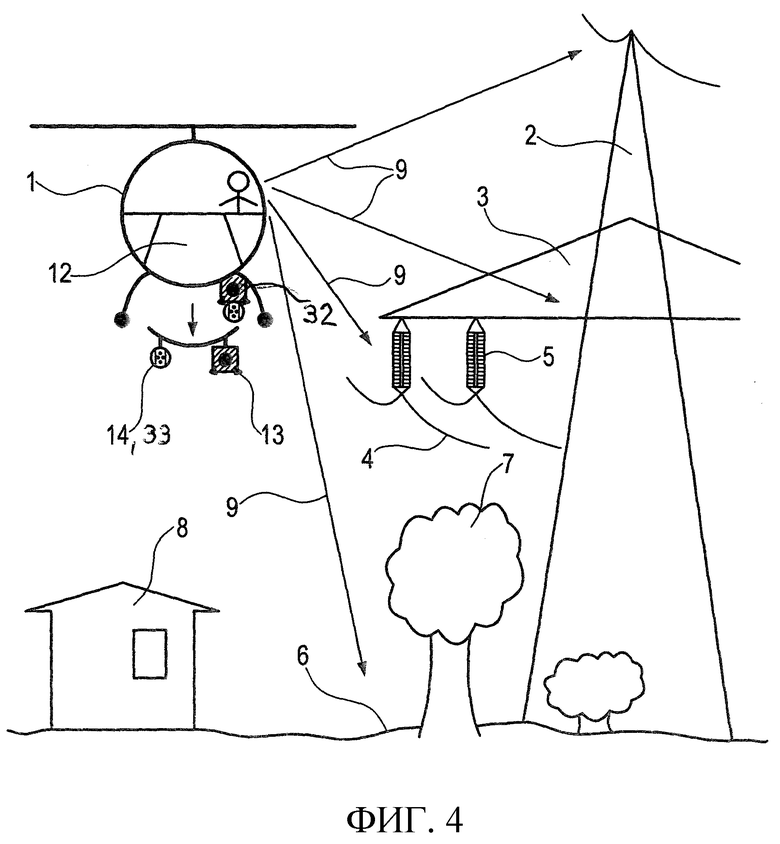
1. Способ контроля с воздуха с помощью пилотируемого летательного аппарата (1) эксплуатационного состояния, конструкции линий электропередачи, безопасности линий и определения вероятности выхода из строя систем воздушных линий электропередачи, характеризующийся тем, что
а) летательный аппарат (1) оборудуют, по меньшей мере, системой (14) датчиков для сбора данных, представляющих физические свойства систем воздушных линий электропередачи, по меньшей мере одной цифровой камерой (13) высокого разрешения для получения данных изображений указанных систем воздушных линий электропередачи и вокруг них и системой (12) лазерного сканирования высокого разрешения, имеющей точность до 0,7 см/пиксель, для сбора данных по условиям окружающей среды, структуре местности и структуре проводов указанных систем воздушных линий электропередачи;
b) связывают систему (14) датчиков, цифровую камеру (13) и систему (12) лазерного сканирования между собой и со спутниковыми системами навигации, отличными от GPS, и используют одни и те же данные одной измерительной антенны;
c) собранные данные соотносят друг с другом в отношении места и времени, и коррелируют между собой;
d) с помощью летательного аппарата (1) получают все данные, включая колебания тока, на выбранной одной и той же скорости полета, на основании заданного профиля полета, на высоте воздушной линии электропередачи и сбоку от направления ее прохождения, за лишь единственный облет системы воздушной линии электропередачи; и
e) также превентивно определяют полученные данные в отношении повреждений или дефектов систем воздушных линий электропередачи и/или начинающегося ухудшения состояния конструкции линии электропередач и/или влияния на нее условий окружающей среды, и подают их в блок обработки, в котором в смысле самообучающейся системы определяют необходимый ремонт и/или рекомендации по сохранению работоспособности, а также вероятность выхода из строя отдельных элементов, участков или зон конструкции линии с включением моделей роста растительности, на основе сравнения с состояниями, содержащимися в базе данных, хранящейся в блоке обработки, и полученные данные выдают на блок выдачи; и
f) посредством дополнительной системы (33) датчиков, соединенной с измерительной аппаратурой (32), измеряют повреждения и/или дефекты на находящихся под напряжением системах воздушных линий электропередачи, вызывающие помехи в электромагнитном поле.
2. Способ по п. 1, отличающийся тем, что с помощью системы (14) датчиков проводят измерения температуры, в частности ультрафиолетовые и инфракрасные измерения.
3. Способ по п. 1 или 2, отличающийся тем, что определенные в блоке обработки рекомендации по ремонту и/или сохранению работоспособности и/или вероятности выхода из строя сохраняют в базе данных в качестве функции полученных данных и используют также для последующих сравнений.
4. Способ по любому из пп. 1-3, отличающийся тем, что цифровая камера (13) высокого разрешения имеет минимальное разрешение 25-350 мегапикселей и содержит датчик изображения по меньшей мере 24×36 мм или по меньшей мере один средне- или полноформатный датчик.
5. Способ по любому из пп. 1-4, отличающийся тем, что цифровая камера (13) высокого разрешения имеет гармонизирующую двойную механическую или электронную или электронно-механическую стабилизацию изображений соответственно в камере и в объективе.
6. Способ по любому из пп. 1-5, отличающийся тем, что передачу данных на наземную станцию или поставщику энергии осуществляют в виде передачи в реальном времени посредством спутникового телефона или мобильной радиосвязи, причем передачу данных в отношении обнаруженных дефектов или повреждений, в связи позиционными данными и данными изображений, осуществляют поставщику энергии и с указанием рейтинга в отношении тяжести происшествия.
7. Способ по любому из пп. 1-6, отличающийся тем, что систему (12) лазерного сканирования, камеры (13) и систему (14) датчиков связывают с универсальной измерительной антенной, посредством которой принимают составные сигналы спутниковой системы навигации, вслед за чем осуществляют разложение составных сигналов на сигнальные данные, требующиеся для соответствующего процесса обработки.
8. Способ по любому из пп. 1-7, отличающийся тем, что с помощью системы (12) лазерного сканирования данные собирают на полной окружности в 360° относительно вертикали и создают, таким образом, 3D-изображение находящейся под напряжением инфраструктуры с высоким разрешением, с точностью в миллиметровом диапазоне.
9. Способ по любому из пп. 1-8, отличающийся тем, что данные изображений создают с помощью четырех цифровых камер (13), размещенных на летательном аппарате (1) таким образом, чтобы регистрировать данные изображений наклонно по отношению к направлению (15) полета вперед и назад, и по одному разу вниз в направлении земли (6).
10. Способ по любому из пп. 1-9, отличающийся тем, что с помощью летательного аппарата (1) выполняют сбор данных для контроля эксплуатационных состояний систем воздушных линий электропередачи на скорости полета в диапазоне 0-60 км/ч.
11. Способ по любому из пп. 1-10, отличающийся тем, что летательный аппарат (1) совершает полет на расстоянии 1-50 м от системы воздушной линии электропередачи.
12. Способ по п. 1, отличающийся тем, что летательный аппарат (1) дополнительно имеет радарную систему для определения эксплуатационных состояний и вероятности выхода из строя, данные которой согласовывают с данными системы (14) датчиков, цифровой камеры (13), системы (12) лазерного сканирования и спутниковой системой навигации.
13. Способ по п. 12, отличающийся тем, что повреждения и/или дефекты измеряют с помощью тепловых датчиков, ИК-датчиков, датчиков коронного разряда или датчиков дневного света.
14. Способ по п. 12 или 13, отличающийся тем, что нарушения нормальной работы и/или дефекты в виде помех или изменений в электромагнитном поле регистрируют посредством антенн или антенных групп и записывают, причем помеховый сигнал нарушений и/или дефектов отслеживают автоматически в горизонтальном и/или вертикальном направлении.
15. Летательный аппарат (1) для осуществления способа по любому из пп. 1-14, характеризующийся тем, что на летательном аппарате (1) и/или внутри него установлены: система (14) датчиков для регистрации неисправностей, повреждений, эксплуатационных состояний и состояния материалов на системах воздушных линий электропередачи, несколько цифровых камер (13) высокого разрешения для получения данных изображений указанных систем и система (12) лазерного сканирования, причем система (14) датчиков, цифровые камеры (13) и система (12) лазерного сканирования размещены в монтажных блоках, и в летательном аппарате (1) размещен блок обработки данных, а также
в летательный аппарат интегрирована измерительная аппаратура (32), к которой подключена дополнительная система (33) датчиков для измерения повреждений и/или дефектов на находящихся под напряжением системах воздушных линий электропередачи, вызывающих помехи в электромагнитном поле,
при этом измерительная аппаратура (32), питаемая системой (33) датчиков, посредством аудиоустройства делает слышимыми вызывающие помехи в электромагнитном поле неисправности, повреждения и/или дефекты систем воздушных линий электропередачи, находящихся под напряжением, и видимыми - посредством элемента, формирующего изображение, и сохраняет их в блоке обработки.
16. Летательный аппарат (1) по п. 15, отличающийся тем, что установленная система (14) датчиков содержит ультрафиолетовые и инфракрасные датчики и датчик положения, указанные несколько цифровых камер высокого разрешения имеют минимальное разрешение 25-350 мегапикселей со стабилизацией изображения камеры и объектива, а система (12) лазерного сканирования высокого разрешения способна сканировать по полной окружности в 360° относительно вертикали и с разрешением в диапазоне около 1500 пикселей/м2.
17. Летательный аппарат (1) по п. 16, отличающийся тем, что система (14) датчиков и система (12) лазерного сканирования связаны с универсальной измерительной антенной, посредством которой принимаются составные сигналы спутниковой системы навигации, за исключением GPS, и после приема происходит их разложение на сигнальные данные, требуемые для соответствующего процесса обработки.
18. Летательный аппарат (1) по любому из пп. 15-17, отличающийся тем, что в него встроена дополнительная радарная система.
19. Летательный аппарат (1) по любому из пп. 15-18, отличающийся тем, что он представляет собой пилотируемый винтокрылый летательный аппарат.
| US 20200074176 A1, 05.03.2020 | |||
| US 20200074176 A1, 05.03.2020 | |||
| US 20180129211 A1, 10.05.2018 | |||
| Способ цифрового управления процессом мониторинга, технического обслуживания и локального ремонта ВЛ и система для его осуществления | 2018 |
|
RU2683411C1 |
| EP 1938159 B1, 24.08.2016 | |||
| US 20180174357 A1, 21.06.2018. | |||

