Область техники
Настоящее изобретение относится к системе связи для детектора положения, которая эффективна при применении, в частности, в качестве системы связи для детектора положения, используемого в станках, автомобилях, роботах и т.п.
Описание предшествующего уровня техники
Детектор положения, который детектирует положение машины, используется в станке с числовым программным управлением (ЧПУ), оборудованным устройством ЧПУ. Станок с ЧПУ управляет блоком привода на основании сигнала от блока ЧПУ, чтобы привести машину в движение. Величина перемещения в это время детектируется детектором положения. Соответствующие детектированные данные вводятся в устройство ЧПУ через аналого-цифровой преобразователь (АЦП). То есть, станок с ЧПУ использует управление с обратной связью с применением детектора положения для управления положением станка с высокой точностью. Инкрементный выход или последовательное соединение, содержащее цифровые импульсные сигналы фазы А или фазы В, используется как выход из АЦП в устройство ЧПУ. Эти выходы (инкрементальный выход и последовательное соединение) представлены только в одном направлении - от детектора положения к устройству ЧПУ.
В документе JP-A-2000-315103 раскрыта административная система для станка с ЧПУ. В этой административной системе для станка с ЧПУ персональный компьютер соединен с блоком контроллера станка с ЧПУ через сеть. Дисплей персонального компьютера отображает множество операционных иконок, которые имеют функции, соответствующие управляющим командам станка с ЧПУ. Эти операционные иконки могут быть выбраны посредством мыши. Сверх того, исследуется рабочее состояние станка с ЧПУ, и в зависимости от этого рабочего состояния запрещается ссылка операционной иконки на команду.
Вышеупомянутый инкрементальный выход представляет собой протокол связи общего назначения для устройства ЧПУ, и он содержит только информацию положения машины. Последовательное соединение, с другой стороны, представляет собой протокол связи, который уникален для устройства ЧПУ, являющегося приемником связи от детектора положения, и данный протокол не универсален. Более того, данные, включенные в последовательное соединение, имеют ограниченное содержимое, такое как обрыв провода. Соответственно, даже использование последовательного соединения вызывало сложности при выявлении места неисправности.
Если в вышеупомянутом станке с ЧПУ выполняется монтаж, регулирование, проверка на неисправность и т.п., то выполняется операция для подтверждения настроек детектора положения и выходного сигнала из этого детектора. Эта операция выполняется в состоянии, когда соединение между детектором положения и устройством ЧПУ разорвано и индикатор положения (счетный прибор), предназначенный для детектора положения, соединен с детектором положения. То есть, устройство ЧПУ останавливается, и соединение между устройством ЧПУ и детектором положения отключается. В этом состоянии детектор положения и индикатор положения соединяются, и информация, отображаемая на индикаторе положения, подтверждается. Соответственно, сами работы по техническому обслуживанию вызывали сложности. Более того, после завершения операции подтверждения соединение между детектором положения и индикатором положения должно быть отключено, и детектор положения и устройство ЧПУ должны быть соединены. Сама по себе эта операция также вызывает сложности. Кроме того, при вышеупомянутой процедуре устройство ЧПУ, которое является составной частью системы, отсоединяется, и индикатор положения, который не является составной частью системы, присоединяется отдельно. Соответственно, отсутствует какая либо вероятность выявления места неисправности.
Для описанной в документе JP-A-2000-315103 административной системы для станка с ЧПУ блок управления станка с ЧПУ, к которому присоединен персональный компьютер, является разным для различных станков. Соответственно, настройки на стороне персонального компьютера должны быть приведены в соответствие со спецификациями блока управления. Очевидно, что административная система не универсальна.
Настоящее изобретение было предложено ввиду вышеописанных проблем. Задача настоящего изобретения заключается в предоставлении системы связи для детектора положения, которая является универсальной, которая может выполнять работы по техническому обслуживанию в состоянии с присоединенным устройством ЧПУ, и которая улучшает точность работ по техническому обслуживанию.
Сущность изобретения
Первый аспект согласно настоящему изобретению предоставляет систему связи для детектора положения, содержащую: детектор положения для детектирования величины перемещения машины; АЦП, соединенный с детектором положения; устройство числового программного управления, соединенное с АЦП и принимающее сигнал положения, преобразованный посредством АЦП; и информационный процессор, соединенный с АЦП через средство двунаправленной связи, способное обеспечивать передачу в двух направлениях, причем процессор информации представляет собой устройство, включающее в себя блок хранения для сохранения данных и программы, вычислительный блок для выполнения программы вычислительным образом и блок отображения для индикации результатов вычислительной операции, выполняемой вычислительным блоком, и данных.
Согласно второму аспекту настоящего изобретения программа может иметь функцию индикации аномалии на блоке отображения, если не могут быть получены ни одни данные из данных положения детектора положения, данных внутреннего состояния детектора положения, данных серийного номера производителя детектора положения, данных модели детектора положения, данных версии детектора положения, данных внутреннего сигнала детектора положения и данных аномалии детектора положения, или если были приняты данные аномалии детектора положения, или если данные внутреннего сигнала отклоняются от допустимого значения.
Согласно третьему аспекту настоящего изобретения программа может иметь функцию определения того, меньше ли данные внутреннего сигнала детектора положения, чем предписанная величина, когда установлен режим регулирования детектора положения, а также индикации на блоке отображения приемлемости или неприемлемости регулирования.
Согласно четвертому аспекту настоящего изобретения программа может иметь функцию периодического сохранения в блоке хранения различных данных, включающих в себя данные положения детектора положения, данные внутреннего состояния детектора положения, данные внутреннего сигнала детектора положения и данные аномалии детектора положения.
Согласно пятому аспекту настоящего изобретения программа может иметь функцию определения того, меньше ли разность между текущими данными детектора положения и его данными в течение инсталляции, чем предписанная величина, и индикации на блоке отображения аномалии или нормального состояния.
Согласно шестому аспекту настоящего изобретения программа может иметь функцию установки режима регулирования детектора положения.
Согласно седьмому аспекту настоящего изобретения программа может иметь функцию изменения внутренних параметров детектора положения.
Согласно восьмому аспекту настоящего изобретения программа может иметь функцию записи данных коррекции для детектора положения.
Согласно девятому аспекту настоящего изобретения программа может иметь функцию изменения версии программного обеспечения детектора положения.
Десятый аспект согласно настоящему изобретению предоставляет станок, включающий в себя систему связи для детектора положения согласно первому аспекту, причем машина представляет собой стол, на котором установлена обрабатываемая деталь, или инструмент для обработки детали.
Как описано выше, система связи для детектора положения, как первый аспект, содержит детектор положения для детектирования величины перемещения машины; АЦП, соединенный с детектором положения; устройство числового программного управления, соединенное с АЦП и принимающее сигнал положения, преобразованный посредством АЦП; и информационный процессор, соединенный с АЦП через средство двунаправленной связи, способное обеспечивать передачу в двух направлениях, причем информационный процессор представляет собой устройство, включающее в себя блок хранения для сохранения данных и программы, вычислительный блок для выполнения программы вычислительным образом и блок отображения для индикации результатов вычислительной операции, выполняемой вычислительным блоком, и данных. Благодаря этой функциональной особенности вычисление может выполняться информационным процессором на основании данных, введенных через АЦП, и данные, требуемые для технического обслуживания, могут быть отображены на блоке отображения информационного процессора для целей подтверждения. Соответственно, работы по техническому обслуживанию могут быть выполнены без разъединения устройства числового программного управления.
Сверх того, информационный процессор всегда остается соединенным с АЦП, и обеспечивается возможность его двунаправленной связи с АЦП. Также, конфигурация системы в течение технического обслуживания системы такая же, как в режиме работы системы. Так, информация об инструментах, составляющих систему, может быть введена в информационный процессор через АЦП, посредством чего повышается точность работ по техническому обслуживанию системы. АЦП, информационный процессор и средство двунаправленной связи сами по себе являются продуктами общего назначения, что обеспечивает универсальность данной системы.
Согласно системе связи для детектора положения, как каждый из аспектов со второго по девятый, вычислительный блок имеет функции выполнения предопределенных программ вычислительным образом. Так, обслуживающий специалист может с легкостью выполнить регулирование детектора положения в состоянии с присоединенным устройством числового программного управления. Поскольку конфигурация системы в течение технического обслуживания такая же, как в рабочем состоянии, точность работ по техническому обслуживанию повышается.
Станок, как десятый аспект, включает в себя систему связи для детектора положения согласно любому аспекту со второго по девятый, причем машина представляет собой стол, на котором установлена обрабатываемая деталь, или инструмент для обработки детали. Так, обслуживающий специалист может с легкостью выполнить регулирование детектора положения в состоянии с присоединенным устройством числового программного управления. Поскольку конфигурация системы в течение технического обслуживания такая же, как в рабочем состоянии, точность работ по техническому обслуживанию повышается.
Краткое описание чертежей
Настоящее изобретение будет совершенно понятно из следующего подробного описания и сопутствующих чертежей, которые приведены только в целях иллюстрации, и, следовательно, не ограничивают настоящее изобретение, и в которых:
Фиг.1А - схематический конфигурационный чертеж первого варианта осуществления системы связи для детектора положения согласно настоящему изобретению.
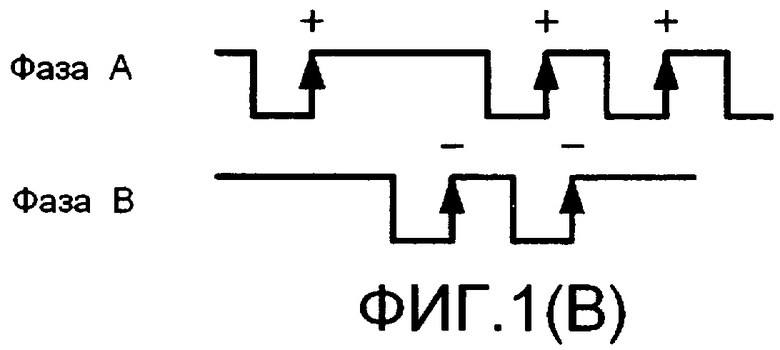
Фиг.1В - график инкрементальной характеристики АЦП в системе связи.
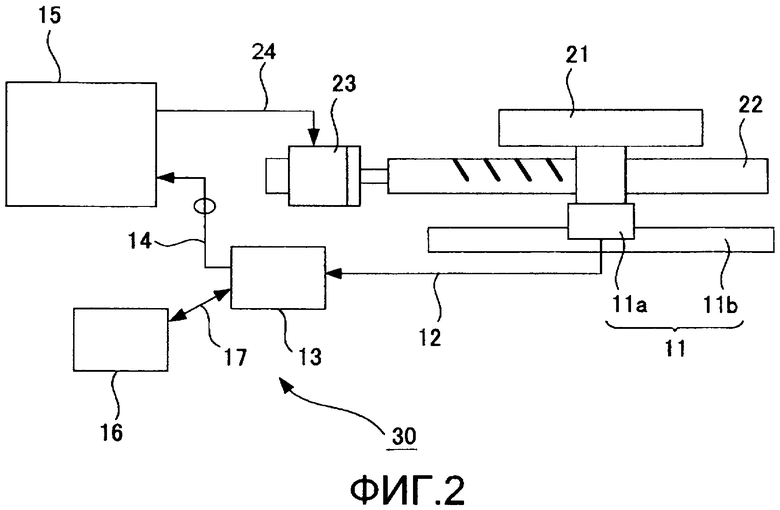
Фиг.2 - вид, иллюстрирующий пример первого варианта осуществления системы связи для детектора положения согласно настоящему изобретению.
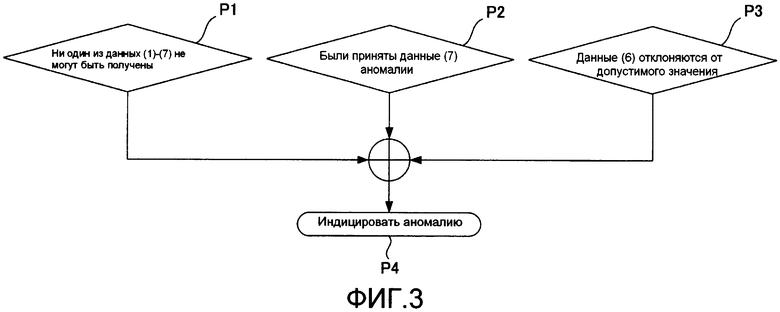
Фиг.3 - вид, иллюстрирующий программу, которая вычислительным образом выполняется информационным процессором, предоставленным в первом варианте осуществления системы связи для детектора положения согласно настоящему изобретению.
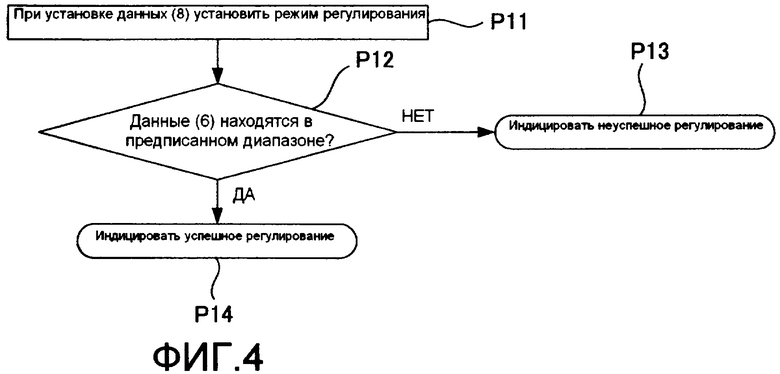
Фиг.4 - вид, иллюстрирующий еще одну программу, которая вычислительным образом выполняется информационным процессором, предоставленным в первом варианте осуществления системы связи для детектора положения согласно настоящему изобретению.
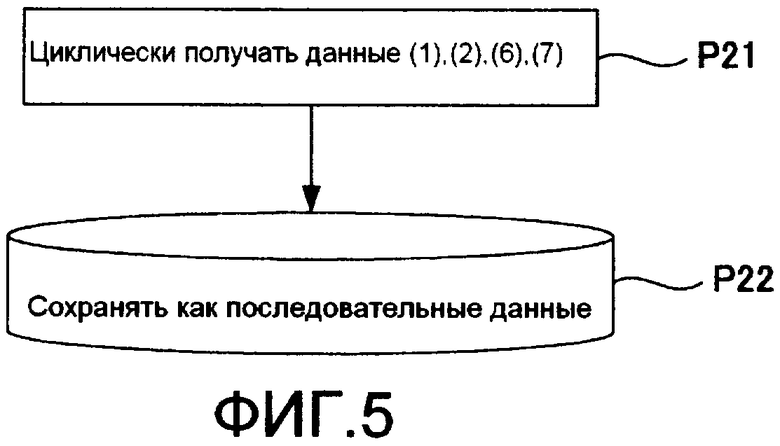
Фиг.5 - вид, иллюстрирующий еще одну программу, которая вычислительным образом выполняется информационным процессором, предоставленным в первом варианте осуществления системы связи для детектора положения согласно настоящему изобретению.
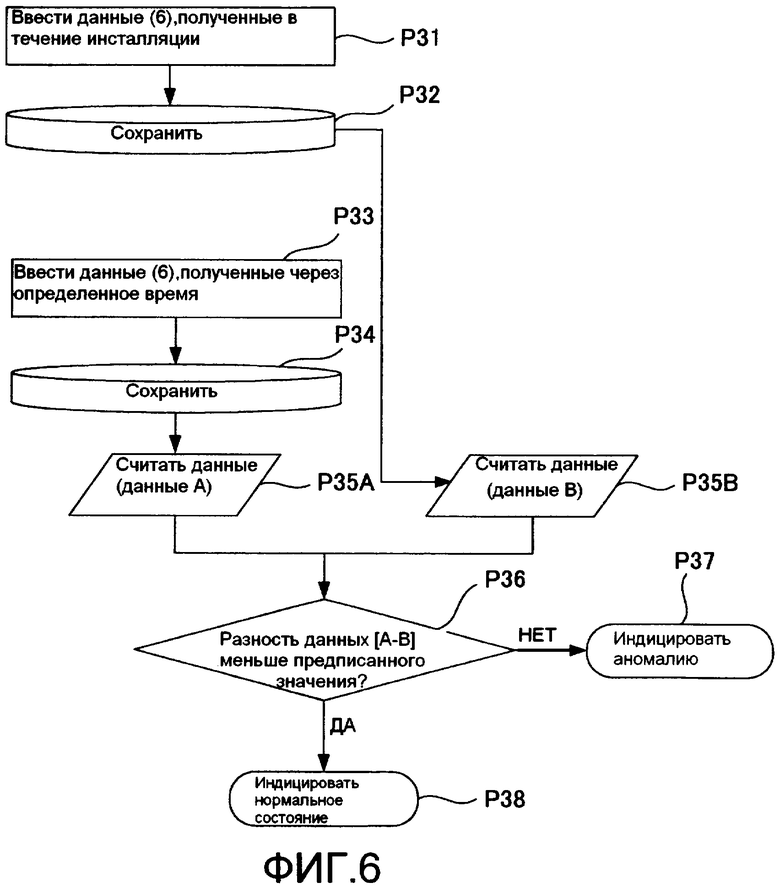
Фиг.6 - вид, иллюстрирующий еще одну программу, которая вычислительным образом выполняется информационным процессором, предоставленным в первом варианте осуществления системы связи для детектора положения согласно настоящему изобретению.
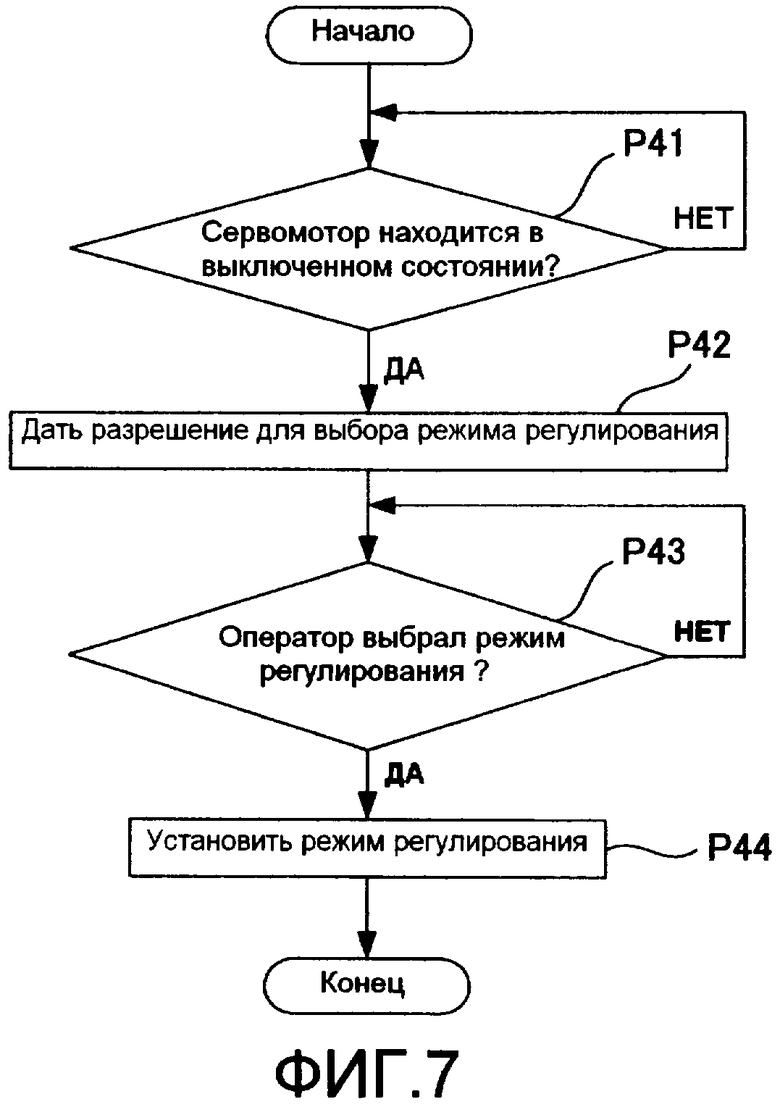
Фиг.7 - вид, иллюстрирующий еще одну программу, которая вычислительным образом выполняется информационным процессором, предоставленным в первом варианте осуществления системы связи для детектора положения согласно настоящему изобретению.
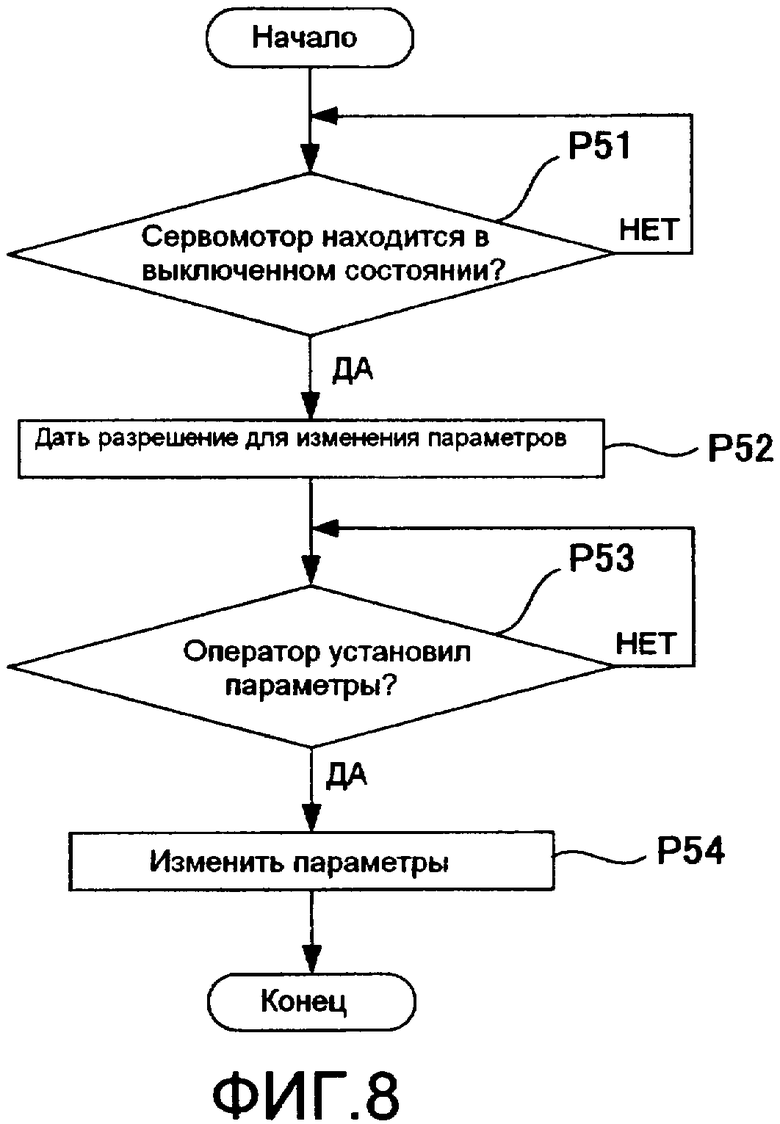
Фиг.8 - вид, иллюстрирующий еще одну программу, которая вычислительным образом выполняется информационным процессором, предоставленным в первом варианте осуществления системы связи для детектора положения согласно настоящему изобретению.
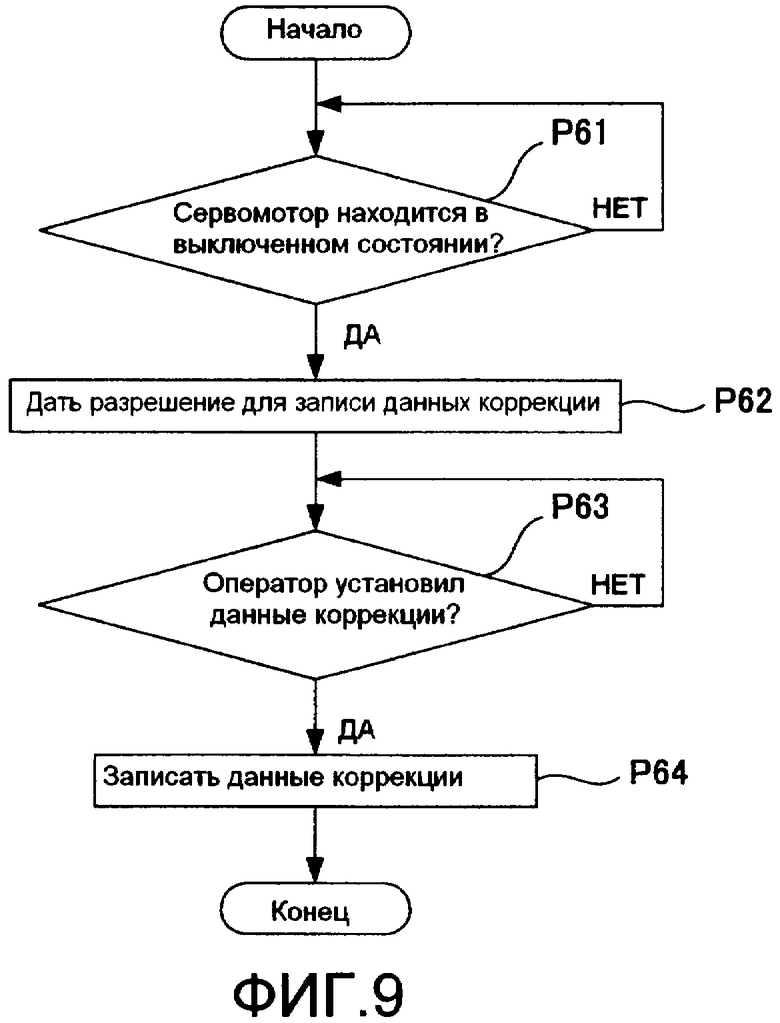
Фиг.9 - вид, иллюстрирующий еще одну программу, которая вычислительным образом выполняется информационным процессором, предоставленным в первом варианте осуществления системы связи для детектора положения согласно настоящему изобретению.
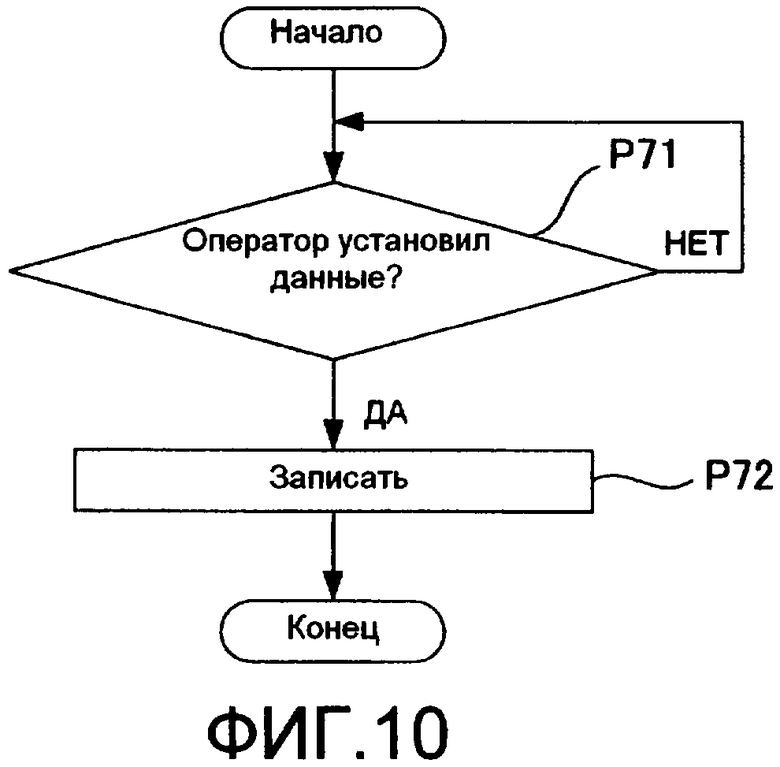
Фиг.10 - вид, иллюстрирующий еще одну программу, которая вычислительным образом выполняется информационным процессором, предоставленным в первом варианте осуществления системы связи для детектора положения согласно настоящему изобретению.
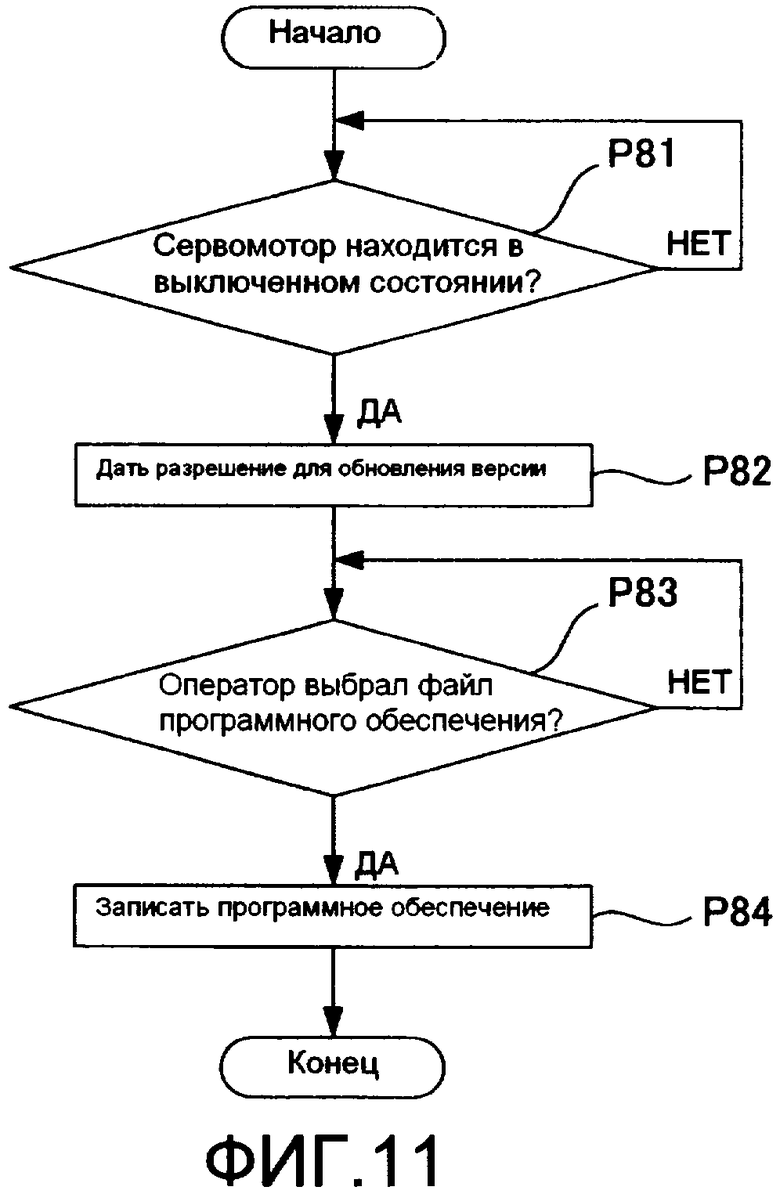
Фиг.11 - вид, иллюстрирующий еще одну программу, которая вычислительным образом выполняется информационным процессором, предоставленным в первом варианте осуществления системы связи для детектора положения согласно настоящему изобретению.
Подробное описание изобретения
Ниже, со ссылкой на сопутствующие чертежи подробно описан лучший вариант осуществления системы связи для детектора положения согласно настоящему изобретению.
Первый вариант осуществления
Ниже, со ссылкой на фиг.1А, 1В-11 описан первый вариант осуществления, в котором система связи для детектора положения согласно настоящему изобретению применяется к устройству цифрового программного управления для числового управления столом станка.
Фиг.1А представляет собой схематический конфигурационный чертеж системы связи для детектора положения. Фиг.1В представляет собой график инкрементальной характеристики АЦП в системе связи. Фиг.2 представляет собой вид, иллюстрирующий систему связи для детектора положения. Фиг.3-11 представляют собой виды, иллюстрирующие программы, которые вычислительным образом выполняются процессором информации, предоставленным в системе связи для детектора положения.
Как показано на фиг.1А, 1В и 2, система 30 связи для детектора положения согласно настоящему изобретению снабжена детектором 11 положения для детектирования положения стола 21, на котором установлена обрабатываемая деталь (не показана). Предоставленный стол 21 имеет возможность перемещения по шариковому винту 22. Вал двигателя 23 соединен с шариковым винтом 22. Путем приведения в движение двигателя 23 шариковый винт 22 приводится во вращение, и стол 21 перемещается вдоль шарикового винта 22.
Детектор 11 положения снабжен подвижной частью 11а, прикрепленной к столу 21, и фиксированной частью 11b, причем подвижная часть 11а имеет возможность перемещения. Детектор 11 положения детектирует положение стола 21 посредством подвижной части 11а, перемещающейся по фиксированной части 11b. Детектор 11 положения соединен с АЦП 12 посредством первого кабеля 12 передачи данных. Так, данные положения стола 21, приписанные детектированию, выполняемому детектором 11 положения, вводятся в АЦП 13.
АЦП 13 соединен с устройством 15 числового программного управления посредством второго кабеля 14 передачи данных. Таким образом, инкрементальные данные (фаза А, фаза В), которые представляют собой сигнал положения, преобразованный посредством АЦП 13, вводятся в устройство 15 числового программного управления. Устройство 15 числового программного управления подсчитывает количество раз, когда в фазе А появляются импульсы (+), и количество раз, когда в фазе В появляются импульсы (-), посредством чего детектируется величина перемещения стола 21.
Устройство 15 числового программного управления соединено с мотором 23 посредством третьего кабеля 24 передачи данных. Таким образом, устройство 15 числового программного управления вычисляет величину приведения двигателя 23 на основании сигнала положения от АЦП 13 и вычисляет разницу между вычисленной величиной и величиной, введенной в устройство 15 числового программного управления для приведения двигателя 23.
Вышеупомянутый АЦП 13 соединен к информационному процессору 16 через универсальную последовательную шину (Universal Serial Bus, USB) 17, которая представляет средство двунаправленной связи, имеющее возможность связи в обоих направлениях. Примером информационного процессора 16 является персональный компьютер. Так, АЦП 13 может получать и передавать данные в информационный процессор 16, между тем обеспечивая связь с устройством 15 числового программного управления.
Информационный процессор 16 представляет собой устройство, содержащее блок хранения (память и жесткий диск) для сохранения различных данных, таких как данные от АЦП 13 и данные в информационный процессор 16, и программ; вычислительный блок (ЦПУ) для выполнения программ вычислительным образом; и блок отображения (дисплей) для отображения различных данных и результатов вычислительной операции, выполняемой вычислительным блоком. Примером информационного процессора 16 является персональный компьютер (ПК).
Для передаваемых данных, например, используются следующие обозначения 9 типов данных:
(1) Данные положения от детектора 11 положения.
(2) Данные внутреннего состояния детектора 11 положения (например, такие данные как, "в течение запуска", "завершение запуска", и различные настройки переключателей).
(3) Данные серийного номера изготовителя детектора 11 положения.
(4) Данные модели детектора 11 положения.
(5) Данные версии детектора 11 положения.
(6) Данные внутреннего сигнала детектора 11 положения (например, данные формы волны сигнала обратной связи (данные в соответствующие моменты времени)).
(7) Данные аномалии детектора 11 положения (например, данные о месте поломки).
(8) Настройка детектора 11 положения информационным процессором 16 (например, настройка различных функций самого детектора).
(9) Запись программного обеспечения из информационного процессора 16 в детектор 11 положения (например, запись программы в блок сохранения программы в детекторе).
Передаваемые данные (1)-(7) представляют собой передаваемые данные, которые выводятся из детектора 11 положения в информационный процессор 16. Передаваемые данные (8)-(9) представляют собой данные, которые выводятся из информационного процессора 16 в детектор 11 положения.
Вышеупомянутый блок хранения информационного процессора 16 сохраняет, например, программы (I)-(IX), и информационный процессор 16 выполняет эти программы вычислительным образом.
Программа (I).
Эта программа выполняет диагностику неисправности и аномалии путем анализа данных. То есть, как показано на фиг.3, на этапе P1 определяется, что не удается получить никаких данных из вышеупомянутых данных (1)-(7). На этапе P1, если никакие данные из данных (1)-(7) не могут быть получены, то определяется аномалия, и программа переходит к этапу P4. На этапе P2 определяется, были ли приняты данные (7) (данные аномалии). На этапе P2, если данные (7) были приняты, то определяется аномалия, и программа переходит к этапу P4. На этапе P3 определяется, отклоняются ли данные (6) от допустимой величины. На этапе P3, если данные (6) отклоняются от допустимой величины, то определяется аномалия, и программа переходит к этапу P4. То есть, если на этапе P1, этапе P2 или этапе P3 определяется аномалия, то программа переходит к этапу P4. На этапе P4 на блоке отображения информационного процессора 16 индицируется наличие аномалии. Соответственно, если детектор 11 положения выходит из строя или становится аномальным, то это состояние с легкостью может быть подтверждено обслуживающим специалистом, и точность технического обслуживания повышается.
Программа (II).
Эта программа определяет, корректна ли регулировка детектора 11 положения. То есть, на этапе P11 в вышеупомянутой настройке в данных (8) устанавливается режим регулирования и программа переходит к этапу P12, как показано на фиг.4. На этапе P12 определяется, находятся ли данные (6) в предписанном диапазоне. Если данные (6) не находятся в предписанном диапазоне, то программа переходит к этапу P13. На этапе P13 на блок отображения информационного процессора 16 выводится индикация о том, что регулировка детектора 11 положения неуспешна. Если данные (6) находятся в предписанном диапазоне, то программа переходит к этапу P14. На этапе P14 на блок отображения информационного процессора 16 выводится индикация о том, что регулировка детектора 11 положения успешна. Так, обслуживающий специалист может с легкостью выполнить регулировку детектора 11 положения в состоянии с присоединенным устройством 15 числового программного управления.
Программа (III).
Эта программа сохраняет регистрационный журнал данных детектора 11 положения. То есть, как показано на фиг.5, данные (1), данные (2), данные (6) и данные (7) получаются через предопределенные временные интервалы (циклически), и программа переходит к этапу P22. На этапе P22 эти различные данные (данные (1), данные (2), данные (6) и данные (7)) сохраняются в блоке хранения информационного процессора 16. Соответственно, обслуживающий специалист может с легкостью получить информацию о прошедшем состоянии детектора 11 положения в состоянии с присоединенным устройством 15 числового программного управления. Для случая, который имеет место с малой частотой, ситуация в момент, когда имело место данное событие, может быть записана без разъединения устройства 15 числового программного управления и детектора 11 положения, и регистрационные записи могут использоваться для отслеживания причины неисправности. Соответственно, анализ неисправности может быть выполнен с высокой точностью.
Программа (IV).
Эта программа диагностирует вековые изменения детектора 11 положения. То есть, как показано на фиг.6, данные внутреннего сигнала детектора положения (данные (6)), полученные в течение инсталляции, вводятся на этапе P31, и программа переходит к этапу P32. На этапе P32 данные, введенные на этапе P31, сохраняются в блоке хранения информационного процессора 16. С другой стороны, данные внутреннего сигнала детектора положения (данные (6)) после инсталляции (через некоторое время) вводятся на этапе P33, и программа переходит к этапу P34. На этапе P34 данные, введенные на этапе P33, сохраняются в блоке хранения информационного процессора 16. Этап P33 выполняется через предопределенные временные интервалы, и данные (6), которые сохраняются в блоке хранения информационного процессора 16, обновляются через предопределенные временные интервалы. Тогда программа переходит к этапу P35A и этапу P35B, где данные А и данные В, соответственно, считываются из блока хранения информационного процессора 16. Тогда программа переходит к этапу P36, на котором определяют, меньше ли разность между данными А и данными B предписанной величины. Если разность между данными A и данными B не меньше предписанной величины, то программа переходит к этапу P37. На этапе P37 на блок отображения информационного процессора 16 выводится индикация о том, что детектор 11 положения был подвержен деградации из-за старения (индикация аномалии). Если разность между данными A и данными B меньше предписанной величины, то программа переходит к этапу P38. На этапе P38 на блок отображения информационного процессора 16 выводится индикация о том, что детектор 11 положения не был подвержен деградации из-за старения (индикация нормального состояния). Соответственно, обслуживающий специалист может с легкостью диагностировать неисправность или аномалию детектора 11 положения вследствие деградации из-за старения в состоянии с присоединенным устройством 15 числового программного управления.
Программа (V).
Эта программа переключает режим регулирования детектора 11 положения. То есть, как показано на фиг.7, на этапе P41 определяется, находится ли двигатель 23 (серводвигатель) в выключенном состоянии. Если двигатель 23 не находится в выключенном состоянии (находится во включенном состоянии), то программа возвращается к этапу P41. Если двигатель 23 находится в выключенном состоянии (не находится во включенном состоянии), то программа переходит к этапу P42. На этапе P42 дается разрешение для выбора режима регулирования детектора 11 положения. Далее программа переходит к этапу P43, на котором определяется, выбрал ли оператор режим регулирования. Если оператор не выбрал режим регулирования, то программа возвращается к этапу P43. Если оператор выбрал режим регулирования, то программа переходит к этапу P44. На этапе P44 устанавливается режим регулирования детектора 11 положения, и программа завершается. Соответственно, обслуживающий специалист может с легкостью переключать режим регулирования детектора 11 положения в состоянии с присоединенным устройством 15 числового программного управления.
Программа (VI).
Эта программа изменяет внутренние параметры (например, временную постоянную, усиление и т.п.) детектора 11 положения. То есть, как показано на фиг.8, на этапе P51 определяется, находится ли двигатель 23 (серводвигатель) в выключенном состоянии. Если двигатель 23 не находится в выключенном состоянии (находится во включенном состоянии), то программа возвращается к этапу P51. Если двигатель 23 находится в выключенном состоянии (не находится во включенном состоянии), то программа переходит к этапу P52. На этапе P52 дается разрешение для изменения внутренних параметров детектора 11 положения. Далее, программа переходит к этапу P53, на котором определяется, установил ли оператор внутренние параметры. Если оператор не установил внутренние параметры, то программа возвращается к этапу P53. Если оператор установил внутренние параметры, то программа переходит к этапу P54. На этапе P54 внутренние параметры детектора 11 положения изменяются на внутренние параметры, установленные на этапе P53, после чего программа завершается. Соответственно, обслуживающий специалист может с легкостью изменять внутренние параметры детектора 11 положения в состоянии с присоединенным устройством 15 числового программного управления.
Программа (VII).
Эта программа записывает данные коррекции в детектор 11 положения. То есть, как показано на фиг.9, на этапе P61 определяется, находится ли двигатель 23 (серводвигатель) в выключенном положении. Если двигатель 23 не находится в выключенном состоянии (находится во включенном состоянии), то программа возвращается к этапу P61. Если двигатель 23 находится в выключенном состоянии (не находится во включенном состоянии), то программа переходит к этапу P62. На этапе P62 дается разрешение для записи данных коррекции. Далее программа переходит к этапу P63, на котором определяется, установил ли оператор данные коррекции. Если оператор не установил данные коррекции, то программа возвращается к этапу P63. Если оператор установил данные коррекции, то программа переходит к этапу P64. На этапе P64 данные коррекции записываются, после чего программа завершается. Так, обслуживающий специалист может с легкостью выполнить запись данных коррекции в детектор 11 положения в состоянии с присоединенным устройством 15 числового программного управления.
Программа (VIII).
Эта программа записывает модель, серийный номер изготовителя и версию в момент изготовления детектора 11 положения. То есть, как показано на фиг.10, на этапе P71 определяется, установил ли оператор различные данные (например, модель, серийный номер изготовителя, версию и т.п.). Если оператор не установил упомянутые различные данные, то программа возвращается к этапу P71. Если оператор установил упомянутые различные данные, то программа переходит к этапу P72. На этапе P72 различные упомянутые данные записываются, и программа завершается. Соответственно, обслуживающий специалист может с легкостью получить данные, которые доступны во время изготовления детектора 11 положения, в состоянии с присоединенным устройством 15 числового программного управления.
Программа (IX).
Эта программа выполняет обновление версии программного обеспечения детектора 11 положения. То есть, как показано на фиг.11, на этапе P81 определяется, находится ли двигатель 23 (серводвигатель) в выключенном положении. Если двигатель 23 не находится в выключенном состоянии (находится во включенном состоянии), то программа возвращается к этапу P81. Если двигатель 23 находится в выключенном состоянии (не находится во включенном состоянии), то программа переходит к этапу P82. На этапе P82 дается разрешение обновить версию программного обеспечения детектора 11 положения. Далее программа переходит к этапу P83, на котором определяется, выбрал ли оператор файл программного обеспечения. Если оператор не выбрал файл программного обеспечения, то программа возвращается к этапу P83. Если оператор выбрал файл программного обеспечения, то программа переходит к этапу P84. На этапе P84 программное обеспечение, выбранное на этапе P83, записывается, после чего программа завершается. Соответственно, обслуживающий специалист может с легкостью выполнить обновление версии программного обеспечения детектора 11 положения в состоянии с присоединенным устройством 15 числового программного управления. Поскольку программное обеспечение детектора 11 положения может быть с легкостью передано от изготовителя детектора 11 положения пользователю, обновление версии программного обеспечения детектора 11 положения может быть выполнено пользователем. Это устраняет необходимость времени и усилий, чтобы заменить сам детектор положения, как делалось раньше.
Вышеописанные обработки (программы (I)-(IX)) могут быть сконфигурированы так, чтобы программное обеспечение в части информационного процессора 16 формировалось посредством специальной Динамически Подключаемой Библиотеки (Dynamic Link Library, DLL)(компонента программного обеспечения), и пользователь применял DLL, чтобы подготавливать собственное программное обеспечение пользователя для управления или измерения положения посредством информационного процессора 16.
Как описано выше, система 30 связи для детектора положения включает в себя детектор 11 положения для детектирования величины перемещения стола 21, АЦП 13, соединенный с детектором 11 положения, устройство 15 числового программного управления, соединенное с АЦП 13 и принимающее сигнал положения, преобразованный посредством АЦП 13, и информационный процессор 16, соединенный с АЦП 13 через USB 17, которая может обеспечить двунаправленную связь, причем информационный процессор 16 содержит вычислительный блок для вычисления данных, полученных от АЦП 13. Благодаря этому устройству вычисления могут выполняться информационным процессором на основании данных, введенных через АЦП, и данные, необходимые для технического обслуживания, могут быть индицированы на блоке отображения информационного процессора 16 для целей подтверждения. Соответственно, предоставляется возможность выполнять работы по техническому обслуживанию без отсоединения устройства 15 числового программного управления. Сверх того, информационный процессор 16 всегда остается соединенным с АЦП 13, и обеспечивается возможность его двунаправленной связи с АЦП 13. Также, конфигурация системы в течение технического обслуживания системы такая же, как в режиме работы системы. Так, информация об инструментах, составляющих систему, может быть введена в информационный процессор 16 через АЦП 13, посредством чего повышается точность работ по техническому обслуживанию системы. Это предоставляет возможность высокой степени настройки, которая была невозможна при использовании только обычной настройки программного обеспечения. АЦП 13, информационный процессор 16 и USB 17 сами по себе являются продуктами общего назначения, что обеспечивает универсальность системы 30 для детектора положения.
Кроме того, информационный процессор 16 индицирует на блоке отображения аномалию, если не могут быть получены никакие данные из (1) данных положения детектора 11 положения, (2) данных внутреннего состояния детектора 11 положения, (3) данных серийного номера изготовителя детектора 11 положения, (4) данных модели детектора 11 положения, (5) данных версии детектора 11 положения, (6) данных внутреннего сигнала детектора 11 положения и (7) данных аномалии детектора 11 положения; или если были приняты данные (7); или если данные (6) отклоняются от допустимого значения. Согласно этой функциональной возможности оператор может с легкостью определить аномалию в детекторе 11 положения. Это облегчает работы по техническому обслуживанию.
Информационный процессор 16 представляет собой устройство, спроектированное для обеспечения возможности установки режима регулирования детектора 11 положения, если данные внутреннего сигнала детектора 11 положения меньше предписанной величины. Согласно этой функциональной возможности установка режима регулирования может быть выполнена без отсоединения детектора 11 положения от системы, так что эффективность работы повышается.
Информационный процессор 16 является устройством, спроектированным так, чтобы циклически сохранять следующие различные данные в блоке хранения: (1) данные положения детектора положения 11, (2) данные внутреннего состояния детектора 11 положения, (6) данные внутреннего сигнала детектора 11 положения и (7) данные аномалии детектора 11 положения. Согласно этой функциональной возможности прошедшее состояние в детекторе 11 положения может быть подтверждено, используя различные данные, сохраненные в блоке хранения. Следовательно, анализ может быть выполнен на основании прошедшего состояния детектора 11 положения, посредством чего повышается точность работ по техническому обслуживанию.
Информационный процессор 16 является устройством, спроектированным так, чтобы определять аномалию, если разность между текущими данными А детектора положения и данными В детектора положения в течение инсталляции превышает предписанное значение. Согласно этой функциональной возможности может быть определена неисправность вследствие деградации из-за старения самого детектора 11 положения. Следовательно, точность технического обслуживания может быть повышена.
Информационный процессор 16 является устройством, спроектированным так, чтобы иметь возможность установки режима регулировки детектора 11 положения. Согласно этой функциональной возможности режим регулирования может быть установлен без отсоединения детектора 11 положения от системы, так что может быть повышена эффективность работы.
Информационный процессор 16 является устройством, спроектированным так, чтобы иметь возможность изменения внутренних параметров детектора 11 положения. Согласно этой функциональной возможности внутренние параметры могут быть установлены без отсоединения детектора 11 положения от системы, так что может быть повышена эффективность работы.
Информационный процессор 16 является устройством, спроектированным так, чтобы иметь возможность записи данных коррекции для детектора 11 положения. Согласно этой функциональной возможности данные коррекции могут быть записаны без отсоединения детектора 11 положения от системы, так что эффективность работы может быть повышена.
Информационный процессор 16 является устройством, спроектированным так, чтобы иметь возможность записи модели, серийного номера производителя и версии детектора 11 положения. Согласно этой функциональной возможности модель, серийный номер производителя и версия могут быть записаны без отсоединения детектора 11 положения от системы, так что эффективность работы может быть повышена.
Информационный процессор 16 является устройством, спроектированным так, чтобы иметь возможность записи программного обеспечения. Согласно этой функциональной возможности программное обеспечение может быть записано без отсоединения детектора 11 положения от системы, так что эффективность работы может быть повышена.
Выше описана система 30 связи для детектора положения, которая включает в себя информационный процессор 16, способный выполнять программы (I)-(IX) вычислительным образом. Тем не менее, система связи может быть системой для детектора положения, которая включает в себя информационный процессор, способный выполнять вычислительным образом, по меньшей мере, одну из программ (I)-(IX). Даже такая система связи для детектора положения представляет такие же действия и эффекты, что и вышеописанная система 30 связи для детектора положения.
Другие варианты осуществления:
Вышеописанный первый вариант осуществления системы связи для детектора положения согласно настоящему изобретению был описан посредством системы 30 связи для детектора положения, применяемой к детектору 11 положения стола 21 станка. Тем не менее, вышеописанная система 30 связи для детектора положения может быть применена как система связи для детектора положения, который детектирует положение машины, такой как инструмент для обработки детали, установленной на столе, или вращающемся подвижном столе. Даже такая система связи для детектора положения представляет такие же действия и эффекты, что и вышеописанная система 30 связи для детектора положения.
Очевидно, что в описанном изобретении могут быть выполнены многочисленные модификации. Такие вариации не следует рассматривать как выходящие за рамки сущности и объема настоящего изобретения, и специалистам в данной области техники будет очевидно, что все такие модификации должны быть включены в объем следующей формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОСИГНАЛЬНЫЙ АНАЛИЗ ДЛЯ ИДЕНТИФИКАЦИИ СКОМПРОМЕТИРОВАННОЙ ОБЛАСТИ ПРИМЕНЕНИЯ | 2018 |
|
RU2768562C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МОНИТОРИНГА АВТОМАТИЗИРОВАННЫХ ПРОЦЕССОВ СВЕРЛЕНИЯ | 2017 |
|
RU2744074C2 |
| Устройство для отладки программ систем с числовым программным управлением | 1985 |
|
SU1288701A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ЦЕНТРАЛИЗОВАННОГО ОБЕСПЕЧЕНИЯ СООТВЕТСТВИЯ, РАБОТЫ И НАЛАДКИ АВТОМАТИЧЕСКИХ СТАНКОВ С РЕЖУЩИМ ИНСТРУМЕНТОМ | 2017 |
|
RU2752339C2 |
| ОБЕСПЕЧЕНИЕ КОНТЕКСТНО-ЗАВИСИМЫХ ИНСТРУМЕНТОВ И СПРАВОЧНОГО ИНФОРМАЦИОННОГО НАПОЛНЕНИЯ В ДОКУМЕНТАХ, СОЗДАВАЕМЫХ НА КОМПЬЮТЕРЕ | 2003 |
|
RU2332728C2 |
| Интеллектуальная система мониторинга безопасности и аналитической обработки данных для средств индивидуальной защиты | 2017 |
|
RU2717901C1 |
| Система и способ выявления аномалий в киберфизической системе | 2022 |
|
RU2800740C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПЕРЕГРУЗОЧНОЙ МАШИНОЙ С ГИБКИМ ПОДВЕСОМ ОБЪЕКТОВ В ЯДЕРНОМ РЕАКТОРЕ ТИПА ВВЭР | 2009 |
|
RU2397556C1 |
| Вычислительная система | 1989 |
|
SU1777148A1 |
| СПОСОБ И СИСТЕМА ПРОВЕДЕНИЯ ПЛАТЕЖЕЙ | 2019 |
|
RU2740301C2 |
Система связи для детектора положения содержит детектор положения для детектирования величины перемещения стола, АЦП, соединенный с детектором положения, устройство числового программного управления, соединенное с АЦП и принимающее сигнал положения, преобразованный посредством АЦП, и информационный процессор, соединенный с АЦП через универсальную последовательную шину, способную передавать в двух направлениях. Информационный процессор включает в себя блок хранения для сохранения данных и программы, вычислительный блок для выполнения программы вычислительным образом и блок отображения для индикации результатов вычислительной операции, выполняемой вычислительным блоком, и данных. 2 н. и 7 з.п. ф-лы, 12 ил.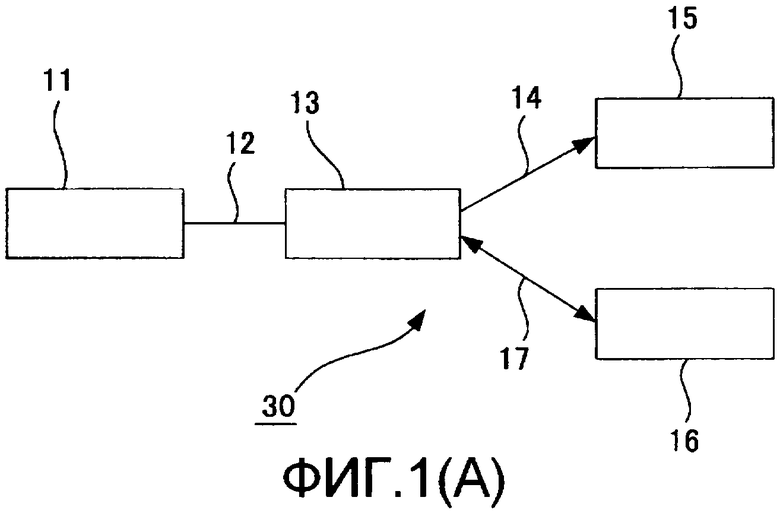
1. Система связи для детектора положения, содержащая:
детектор положения для детектирования величины перемещения машины;
аналого-цифровой преобразователь, соединенный с детектором положения;
устройство числового программного управления, которое соединено с аналого-цифровым преобразователем и которое принимает сигнал положения, преобразованный аналого-цифровым преобразователем; и
информационный процессор, соединенный с аналого-цифровым преобразователем через средство двунаправленной связи, способное обеспечивать передачу в двух направлениях,
причем информационный процессор представляет собой устройство, включающее в себя блок хранения для сохранения данных и программы, вычислительный блок для вычислительного выполнения программы и блок отображения для индикации результатов вычислительного выполнения, осуществляемого вычислительным блоком, и данных,
при этом программа имеет функцию индикации аномалии на блоке отображения, если не могут быть получены ни одни данные из данных положения детектора положения, данных внутреннего состояния детектора положения, данных серийного номера изготовителя детектора положения, данных модели детектора положения, данных версии детектора положения, данных внутреннего сигнала детектора положения и данных аномалии детектора положения, или если были приняты данные аномалии детектора положения, или если данные внутреннего сигнала отклоняются от допустимого значения.
2. Система связи для детектора положения по п.1, в которой
программа имеет функцию определения того, меньше ли данные внутреннего сигнала детектора положения, чем предписанная величина, когда установлен режим регулирования детектора положения, и индикации на блоке отображения приемлемости или неприемлемости регулирования.
3. Система связи для детектора положения по п.1, в которой
программа имеет функцию периодического сохранения в блоке хранения различных данных, включающих в себя данные положения детектора положения, данные внутреннего состояния детектора положения, данные внутреннего сигнала детектора положения и данные аномалии детектора положения.
4. Система связи для детектора положения по п.1, в которой
программа имеет функцию определения того, меньше ли разность между текущими данными детектора положения и его данными в течение инсталляции, чем предписанная величина, и индикации на блоке отображения аномалии или нормального состояния.
5. Система связи для детектора положения по п.1, в которой
программа имеет функцию установки режима регулирования детектора положения.
6. Система связи для детектора положения по п.1, в которой
программа имеет функцию изменения внутренних параметров детектора положения.
7. Система связи для детектора положения по п.1, в которой
программа имеет функцию записи данных коррекции для детектора положения.
8. Система связи для детектора положения по п.1, в которой
программа имеет функцию изменения версии программного обеспечения детектора положения.
9. Станок, включающий в себя систему связи для детектора положения по п.1, в котором
машина представляет собой стол, на котором установлена обрабатываемая деталь, или инструмент для обработки детали.
| СТАНОК ДЛЯ РЕЗКИ ПОД УГЛОМ С ИНДИКАЦИЕЙ УГЛА УСТАНОВКИ РЕЖУЩЕГО ЭЛЕМЕНТА (ВАРИАНТЫ) | 2004 |
|
RU2292997C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОЧНОСТЬЮ ОБРАБОТКИ ДЕТАЛЕЙ НА ВЫСОКОТОЧНОМ ОБОРУДОВАНИИ ЧПУ | 2005 |
|
RU2288808C2 |
| US 2001000856 A1, 10.05.2001 | |||
| US 4641557 A1, 10.02.1987 | |||
| Отрезное устройство | 1982 |
|
SU1041240A2 |
| Отрезной станок с изменяемым углом отрезки | 1980 |
|
SU965641A1 |
| ШАРНИРНАЯ КОНСТРУКЦИЯ В КАРДАННОМ ВАЛУ | 2020 |
|
RU2762152C1 |

