Изобретение относится к области судостроения - автоматическому управлению движением корабля с диагностированием исправности работы модулей системы автоматического управления движением (САУД) корабля и автоматической перестройкой САУД для сохранения ее работоспособности при наличии сбоя в каком-либо модуле системы
Известен способ управления движением корабля с диагностикой САУД путем оценки сигнала рассогласования текущего угла курса относительно заданного его значения [Острецов Г.Э. Методы построения отказобезопасных систем управления движением корабля. // Международный научно-технический семинар «Современные технологии в задачах управления, автоматики и обработки, информации». Украина, Алушта, 2009 г. Сборник трудов, стр.23].
Известен способ повышения качества измеряемой информации в САУД путем сравнения измеренных сигналов с полученными от электронной модели процесса управления движением корабля [Система восстановления параметров движения корабля. // Сборник трудов междуведомственного Совета по управлению движением судов, выпуск XX, изд. ИЛУ РАН, 1993 г., Москва. Стр.16-18].
Известен также способ управления движением корабля с диагностированием исправности отдельных элементов САУД в процессе работы (патент России №2155142, принятый нами в качестве прототипа). В этом способе управления движением судна используют сигналы текущего угла курса - φ, скорости изменения курса - d/dt φ и сигнал заданного значения угла курса - φзд, которые вводят в вычислитель для формирования сигнала заданного угла перекладки руля - δзд. На выходе вычислителя формируется закон управления рулевым приводом: δзд:
 .
.
Этот же сигнал δзд вводят на вход электронной модели рулевой системы для формирования сигнала модельного угла перекладки руля - δмодели, который при исправности рулевой системы тождественен сигналу угла перекладки руля с выхода рулевой системы - δ. Сигналы угла перекладки руля с выхода рулевой системы - δ и выхода электронной модели рулевой системы - δмодели вводят на индикатор. При разности сигналов более допустимой величины C1 индикатор в САУД срабатывает, информируя судоводителя о сбое в рулевой системе:

К недостаткам рассмотренного способа автоматического управления движением судна с диагностикой сбоя в рулевой системе следует отнести:
- индикатор сбоя отмечает только расхождение сигналов в рулевой системе относительно сигналов, полученных в модели рулевой системы, а где произошел сбой, в самой рулевой системе или в электронной модели рулевой системы, не выявляется,
- если произошел сбой в рулевой системе, рассмотренный способ диагностирования выдаст только информацию о сбое, при этом аварийная ситуация ждет личного участия судоводителя (судно окажется без автоматического управления),
- выявляется сбой только в одном из узлов САУД.
Предлагаемый способ управления лишен отмеченных недостатков. Целью способа отказобезопасного автоматического управления движением корабля является сохранение автоматического управления движением корабля при любом сбое в системе управления движением.
Способ базируется на формировании сигналов управления в автономных модулях повышенной надежности, т.е. архитектура САУД строится по модульно- структурному принципу и содержит:
- измерительный модуль - φ,
- программный модуль - φзд,
- вычислительный модуль - δзд,
- модуль исполнительных средств - δ.
Для выявления сигнала сбоя и перестройки закона управления используется блок диагностики с резервными модулями:
- измерительный модуль - φрез,
- вычислительный модуль - δзд. резервный,
- модуль модели исполнительных средств - δмодельный,
- модуль резервных исполнительных средств - δрезерв.
Формирование способа автоматического управления движением корабля базируется на достоверном выявлении факта сбоя в конкретном модуле САУД и изменении архитектуры САУД для обеспечения автоматического управления при появлении сбоя в каком-либо модуле САУД.
Сигналы из измерительного модуля - φ и программного модуля - φзд вводят на вход вычислительного модуля, на выходе которого формируется сигнал управления δзд в соответствии с зависимостью (1). Сигнал δзд вводят на вход модуля исполнительных средств - δ.
Одновременно сигналы из измерительного модуля - φ и программного модуля - φзд вводят в блок диагностики для формирования сигнала модуля разности этих двух сигналов.
Модуль разности формируют через интервалы времени Δt:

Если модуль разности превысит заданное значение:

в блоке диагностики формируют сигнал d/dt φзд и если выполняется условие (4):

формируют модули сигналов невязок:

При выполнении условия (5а):

сигнала - φ из измерительного модуля отключают от входа вычислительного модуля - δзд, а сигнал - φфрез из резервного измерительного модуля вводят на вход вычислительного модуля - δзд для формирования корректированного закона управления.
При выполнении условия (6а)

Сигнал - δзд.резервный из резервного вычислительного модуля вводят на вход модуля резервных исполнительных средств, вместо сигнала - δзд из вычислительного модуля. При выполнении условия (7а):

сигнала - δзд из вычислительного модуля отключают от модуля исполнительных средств - δ и вводят на вход модуля резервных исполнительных средств сигнал - δрезер.
Таким образом формируется способ отказобезопасного автоматического управления движением корабля при выявлении любого ложного сигнала φ, или δзд, или δ, с автоматической перестройкой архитектуры САУД,
Рассмотрим аппаратурный вариант реализации предложенного способа.
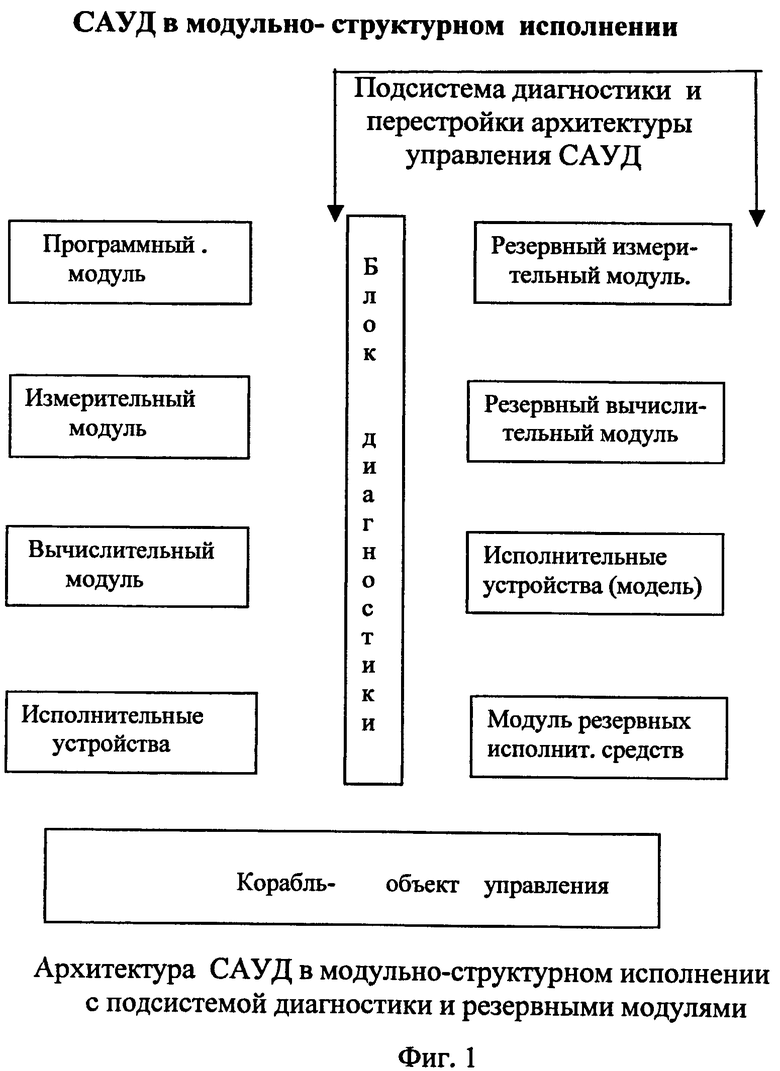
На фиг.1 приведена архитектура построения САУД в модульно-структурном исполнении с системой диагностики.
Собственно система автоматического управления движением может быть реализована в виде четырех автономных модулей повышенной надежности. Для диагностирования сбоя в любом модуле САУД введен блок диагностики с модулями: моделью исполнительных устройств, резервным измерительным модулем, резервным вычислителем и резервными исполнительными средствами.
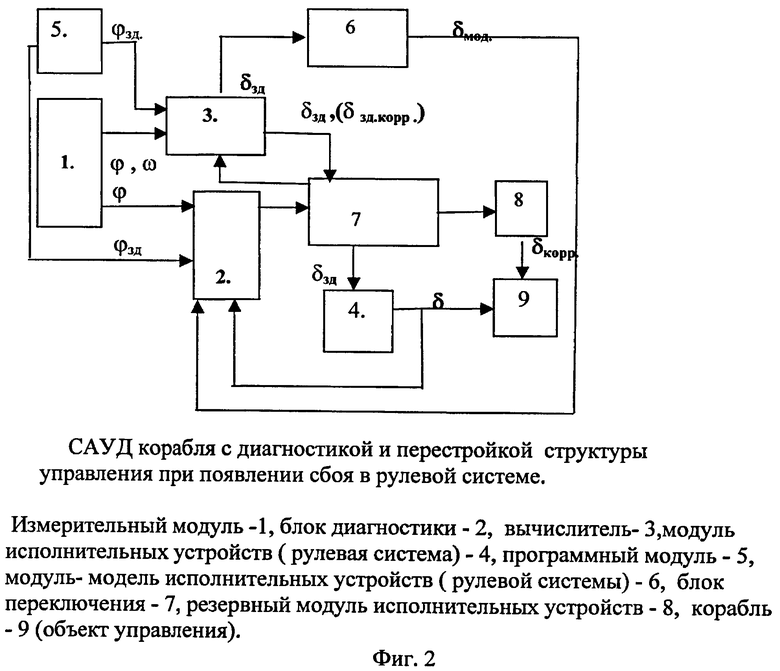
Рассмотрим детально часть аппаратуры САУД, реализующую предложенный способ управления движением корабля, если выполняются условия (3) и (6а) (см. фиг.2, в этом случае в блоке диагностики используются только резервный модуль - исполнительных средств и модуль - модель исполнительных устройств).
Сигнал заданного значения угла курса - φзд, сформированный в программном модуле - 5, вводится в вычислитель - 3, на вход вычислителя также вводится сигнал текущего курса - φ и угловой скорости - ω из измерительного модуля - 1. На выходе вычислителя формируется управляющий сигнал - δзд, который проходит через переключатель - 7 на вход исполнительного устройства (рулевой системы) - 4:

где δзд - заданное значение угла перекладки руля,
Ki - коэффициенты регулирования. Для диагностирования появления сбоя в рулевой системе используют
сигналы с измерительного модуля - 1, модуля - модели исполнительных устройств - 6 и модуля исполнительных устройств - 4:
φ - текущего курса из измерительного модуля,
φзд - заданного значения угла курса из программного модуля,
δ - угла перекладки руля из модуля исполнительные устройства,
δмодели - угла перекладки руля из модуля модели исполнительных устройств,
В блоке диагностики - 2 формируют появление сигнала сбоя в модуле исполнительных устройств (рулевой системе), который поступает в переключатель - 7, при выполнении двух условий:
и

где C1, С - постоянные значения, задаваемые судоводителем.
При выполнении условий (3) и (7а) в блоке переключателе сигнал автоматического управления движением судна (1), поступивший из вычислителя, отключается от модуля исполнительных устройств (рулевой системы) - 4 и подключается на вход модуля резервных исполнительных средств - 8.
При реализации рассматриваемой аппаратуры: 1 - измерительный модудь САУД, может быть принят типа «Мининавигация» (разработки ЦНИИ «Электроприбор» С. Петербург); 2 - блок диагностики можно реализовать на типовом микроконтроллере, 3 - вычислитель реализуется на микросхеме 140УД-6, 4 - исполнительные устройства - штатная корабельная рулевая машина; 5 - программный модуль - типовой микроконтроллер, 6 - модуль-модель исполнительных устройств (электронная модель рулевой системы) может быть реализована на двух микросхемах 140 УД-6 и 140 УД-8, 7 - блок переключения реализуется на электромагнитном реле и 8 - резервный модуль дополнительных исполнительных средств управления движением корабля может быть реализован на интерцепторах и (или) виде регуляторов,
управляющих левым и правым гребными винтами (для создания «раздрая» оборотов гребных винтов).
Описание работы СА УД корабля с диагностикой и перестройкой архитектуры при сбое в исполнительных устройствах (см. фиг.2). Заданное значение угла курса - φзд, формируемое в программном модуле - 5, поступает в вычислитель - 3. В вычислитель также вводится текущей курс - φ и сигнал угловой скорости - ω из измерительного модуля - 1. На выходе вычислителя формируется управляющий сигнал исполнительными средствами (рулевым приводом) - δзд в соответствии с зависимостью (1), который поступает через блок переключения - 7 на вход рулевой системы - 4, что приводит к движению корабля по заданному направлению (в нормальных условиях эксплуатации).
При появлении сбоя в блоке диагностики - 2 осуществляется достоверное выявление начала аварии. Это достигается, если удовлетворяются два условия по зависимости (3) и зависимости (7а). Сигнал сбоя из блока диагностики поступает в блок переключения - 7 на срабатывание реле, которое переключает управляющий сигнал из вычислителя - δзд от входа модуля исполнительного устройства (рулевой системы) - 4 и подключает к входу модуля резервных исполнительных средств, управляющих движением корабля - 8. Так восстанавливается автоматическое управление корабля в соответствии заданным заданием - φзд, при сбое в модуле исполнительных средств.
Для выявления сбоя в измерительном модуле рассмотренную аппаратуру, приведенную на фиг 2, следует дополнить резервным измерительным модулем в соответствии с фиг.1.
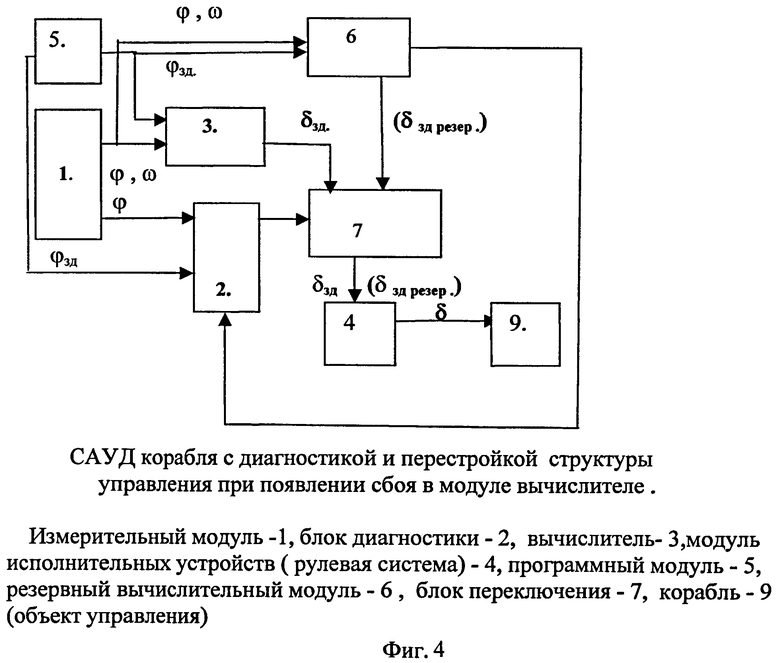
На фиг.3 приведена блок-схема части аппаратуры САУД, которая позволит выявить сбой в измерительном модуле и перестроить архитектуру для продолжения эффективного автоматического управлением движением корабля.
Описание работы САУД с диагностикой сбоя в измерительном модуле и перестройкой структуры управления САУД [фиг 3].
Требуемое направление движения корабля формируется в программном модуле - 5 в виде задания направления движения корабля - φзд, которое поступает в вычислительный модуль - 3. В вычислительный модуль также вводится текущей курс - φ и сигнал угловой скорости - ω из измерительного модуля - 1. На выходе вычислительного модуля формируется управляющий сигнал исполнительными средствами управления движением (рулевым приводом) - δзд в соответствии с зависимостью (1).
Управляющий сигнал δзд через блок переключения поступает на вход модуля исполнительных средств - 4, что приводит к движению корабля по заданному направлению в нормальных условиях плавания.
Достоверное выявление сбоя в измерительном модуле осуществляется в блоке диагностики - 2. С этой целью к блоку диагностики подключены измерительный модуль - 1, резервный измерительный модуль - 6 и программный модуль - 5. Условия сбоя формируются в блоке диагностики и имеют вид:

и

При удовлетворении условий (3) и (5а) в блоке диагностики формируется сигнал изменения закона управления в модуле вычислителе САУД. На выходе вычислителя формируется сигнал резервного управления - δзд.резер:

Этот сигнал из модуля вычислителя поступает на вход модуля исполнительных средств. При этом, несмотря на сбой в измерительном модуле - 1, автоматическое управление кораблем сохраняется в соответствии с заданным значением - φзд.
На фиг.4 приведена блок-схема с корректировкой части аппаратуры (добавлен резервный модуль вычислитель в соответствии с фиг.1). Это позволяет выявить сбой в модуле-вычислителе и перестроить архитектуру САУД для продолжения эффективного автоматического управлением движением корабля при наличии сбоя в вычислителе.
Перестройка происходит при удовлетворении двух условий:

В блоке диагностики после выполнения условий (3) и (6а) вырабатывается сигнал, который поступает в блок переключения - 7 при этом на модуль исполнительных устройств вместо сигнала из модуля вычислителя - δзд. поступит сигнал от резервного вычислителя - δзд.резервный.
Проведенное моделирование с использованием электронных резервных моделей подтвердило эффективность предложенного способа диагностирования САУД с перестройкой архитектуры при сбое в любом модуле.
Изобретение относится к области судостроения. В способе отказобезопасного автоматического управления движением используются блок диагностики, модули: программный, вычислительный, исполнительных устройств, измерительный, резервные модули: вычислительный - δзд.резер., исполнительных устройств - δрезер., измерительный - φрезер. и модель исполнительных устройств - δмодельн. В блоке диагностики формируют: первый сигнал разности сигналов угла курса (из измерительного модуля) и заданного угла курса (из программного модуля) |φ-φзд.|, второй сигнал разности сигналов угла курса (из измерительного модуля) и сигнала резервного угла курса (из резервного измерительного модуля) |φ-φрезер.|, третий сигнал разности сигналов δзд. (из вычислительного модуля) и сигнала δзд.резер. (из резервного вычислительного модуля) |δзд.-δдз.резер.|, четвертый сигнал разности сигналов δ (из модуля исполнительных устройств) и сигнала δмодельн. (из резервного модуля модели исполнительных устройств) |δ-δмодельн.|. Сигналы разности сравниваются с сигналами допустимых значений. По результатам сравнений производится автоматическая перестройка архитектуры САУД. Достигается автоматическое управление движением корабля при наличии сбоя в любом из модулей САУД. 4 ил.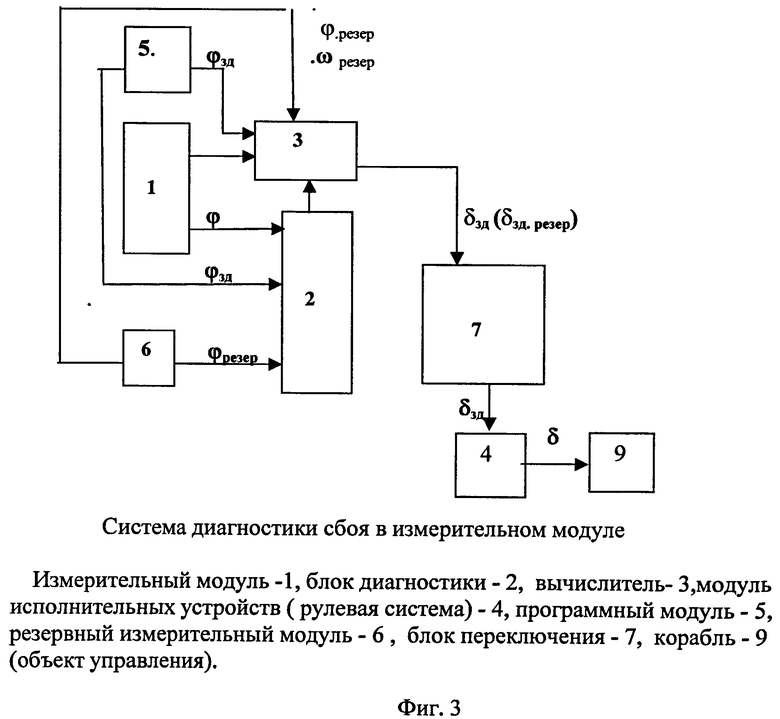
Способ отказобезопасного автоматического управления движением корабля, использующий модули: программный, вычислительный, исполнительных устройств и измерительный, в последнем формируется сигнал угла курса - φ, в программном модуле формируется сигнал заданного угла курса - φзд, оба сигнала вводятся в вычислительный модуль, в котором используют также сигнал угловой скорости курса из измерительного модуля для формирования сигнала заданного значения угла перекладки руля - δзд, сигнал δзд вводят на вход модуля исполнительных устройств, на выходе которого формируется сигнал угла перекладки руля - δ, отличающийся тем, что используют блок диагностики и резервные модули: вычислительный - δзд.резер, исполнительных устройств - δрезер, измерительный - φрезер и модель исполнительных устройств - δмодельн, сигналы: φ, φзд, δ, φрезер, δмодельн из соответствующих модулей вводят в блок диагностики, в последнем формируют: первый сигнал разности сигналов угла курса (из измерительного модуля) и заданного угла курса (из программного модуля) |φ-φзд|, второй сигнал разности сигналов угла курса (из измерительного модуля) и сигнала резервного угла курса (из резервного измерительного модуля) |φ-φрезер|, третий сигнал разности сигналов δзд (из вычислительного модуля) и сигнала δзд.резер (из резервного вычислительного модуля) |δдз-δдз.резер|, четвертый сигнал разности сигналов (из модуля исполнительных устройств) и сигнала δмодельн (из резервного модуля модели исполнительных устройств) |δ-δмодельн|, модуль первого сигнала разности сигналов сравнивают с сигналом допустимого значения, если модуль первого сигнала разности сигналов не превышает сигнал допустимого значения, то через интервалы времени Δt вновь сравнивают модуль первого сигнала разности сигналов с сигналом допустимого значения, в момент времени nΔt, когда модуль первого сигнала разности сигналов превысит сигнал допустимого значения, то модуль второго сигнала разности сигналов сравнивают с сигналом допустимого значения, и если модуль второго сигнала разности превышает сигнал допустимого значения, то в вычислительном модуле формируют сигнал заданного значения угла перекладки руля - δзд с использованием сигнала заданного угла курса φзд (из программного модуля) и сигнала резервного угла курса φрезер (из резервного измерительного модуля), сигнал заданного значения угла перекладки руля - δзд вводят на вход модуля исполнительных устройств, на выходе модуля исполнительных устройств формируется угол перекладки руля δ, модуль второго сигнала разности сигналов меньше допустимого значения, то формируют модуль третьего сигнала разности сигналов и сравнивают с сигналом допустимого значения, если третий сигнал разности сигналов больше допустимого значения, то в резервном вычислительном модуле формируют заданное значение угла перекладки руля - δзд.резер с использованием сигнала заданного угла курса - φзд (из программного модуля) и сигналов угла курса φ и угловой скорости (из измерительного модуля), сигнал δзд.резер вводят на вход модуля исполнительных устройств, на выходе модуля исполнительных устройств формируется сигнал угла перекладки руля - δ, третий сигнал разности меньше допустимого значения, то формируют модуль четвертого сигнала разности сигналов, если модуль четвертого сигнала превышает сигнал допустимого значения, то в вычислительном модуле формируют заданное значение угла перекладки руля - δзд с использованием сигнала заданного угла курса - φзд (из программного модуля) и сигнала угла курса (из измерительного модуля), которое вводят на вход резервного модуля исполнительных средств, на входе последнего формируется сигнал угла перекладки руля - δрезер.
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| Способ очистки фосфорной кислоты от мышьяка | 1938 |
|
SU55734A1 |
| RU 1302599 A1, 27.07.1999 | |||
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |

