Предлагаемое изобретение относится к области судостроения - автоматизации управления движением корабля, в частности к методам управления движением корабля с непрерывным диагностированием исправности работы отдельных модулей системы автоматического управления движением (САУД) корабля и автоматической перестройкой САУД для сохранения ее работоспособности в процессе автоматического управления движением корабля при появлении сбоя в отдельных модулях системы.
Известен способ повышения качества измеряемой информации в САУД путем сравнения измеренных сигналов, полученных с использованием моделей процесса (Система восстановления параметров движения корабля. // Сборник трудов Совета по управлению движением судов, выпуск XX, изд. ИЛУ РАН, 1993 г., Москва). Известен также способ диагностирования отдельных элементов САУД корабля в процессе работы, используемый в системе автоматического управления курсом судна (патент России №2012919) и принятый нами качестве прототипа. В способе стабилизации курса судна используют сигналы текущего угла курса φ и скорости изменения курса ω из измерительного блока САУД и сигнал заданного значения угла курса φзд из модуля задания программ управления, которые водят в вычислитель для формирования сигнала заданного угла перекладки руля δзд, который вводят в рулевой привод (исполнительные средства управления движением). Одновременно диагностируют возможность появления сбоя сигнала текущего угла курса φ в измерительном блоке САУД, с этой целью использован также сигнал оценки курса из электронной модели движения судна φмод. Появление сбоя формируют в виде модуля сигнала разности:
При выполнении условия (1) сигнал индикации о сбое выдают на соответствующие индикаторы.
К недостаткам рассмотренного способа диагностики сбоя в измерительном блоке САУД следует отнести:
- индикатор сбоя отмечает только расхождение сигналов измерительного блока САУД относительно сигналов, полученных на модели движения судна, а где произошел сбой - в измерительном блоке САУД или в модели движения судна - не известно,
- если произошел сбой в измерительном блоке САУД, рассмотренный способ диагностирования выдаст только информацию о сбое, а судно при этом окажется без управления.
Целями предлагаемого способа управления движением корабля с диагностикой являются выявление появившегося сбоя в измерительном блоке САУД и перестройка архитектуры САУД для обеспечения отказобезопасного автоматического управления движением корабля.
Предложенный способ позволяет:
- достоверно диагностировать сбой в САУД,
- изменять структуру функционирования САУД для обеспечения отказобезопасного автоматического управления движением корабля. (Рассматривается случай при сбое происходящем только в блоке формирования измеряемой информации САУД.)
Способ диагностирования сбоя в САУД и изменения структуры функционирования САУД базируется на использовании: измерительного блока САУД, первого вычислителя, исполнительных средств управления движением и модуля задания программ управления. Сигнал заданного значения угла курса φзд, сформированный в модуле задания программ управления, вводится в первый вычислитель, на вход которого также вводится сигнал текущего курса φ и угловой скорости ω из измерительного блока САУД. На выходе первого вычислителя формируется управляющий сигнал исполнительными средствами управления движением (рулевым приводом) δзд:

где δзд - заданное значение угла перекладки руля,
Кi - коэффициенты регулирования.
Для диагностирования появления сбоя и перестройки САУД дополнительно используют: блок диагностики, второй вычислитель, блок коррекции управления и автономный измеритель курса.
В блок диагностики вводят сигналы:
- текущего курса φа из автономного измерителя курса,
- текущего курса φ и угловой скорости ω из измерительного блока САУД,
- заданного значения угла курса φзд из модуля задания программ управления.
В блоке диагностики формируют сигнал сбоя измерительного блока САУД при выполнении двух условий:

где C1, С2 - постоянные значения, задаваемые судоводителем.
Сигнал сбоя вводят в блок коррекции управления для отключения:
- управляющего сигнала исполнительными средствами, сформированного по зависимости (2) от исполнительных средств управления движением,
- подключения к исполнительным средствам управления движением сигнала корректируемого управления δзд. корр, который формируется во втором вычислителе:

где ωa=d/dt φa - сигнал угловой скорости, восстановленный с использованием сигнала φa c автономного измерителя курса.
Во второй вычислитель вводят сигналы:
- текущего курса φа из автономного измерителя курса,
- заданного курса φзд из модуля задания программ управления.
Замена управления по зависимости (2) корректированным управлением по зависимости (2а) позволяет осуществить отказобезопасное автоматическое управление движением корабля в заданном режиме эксплуатации.
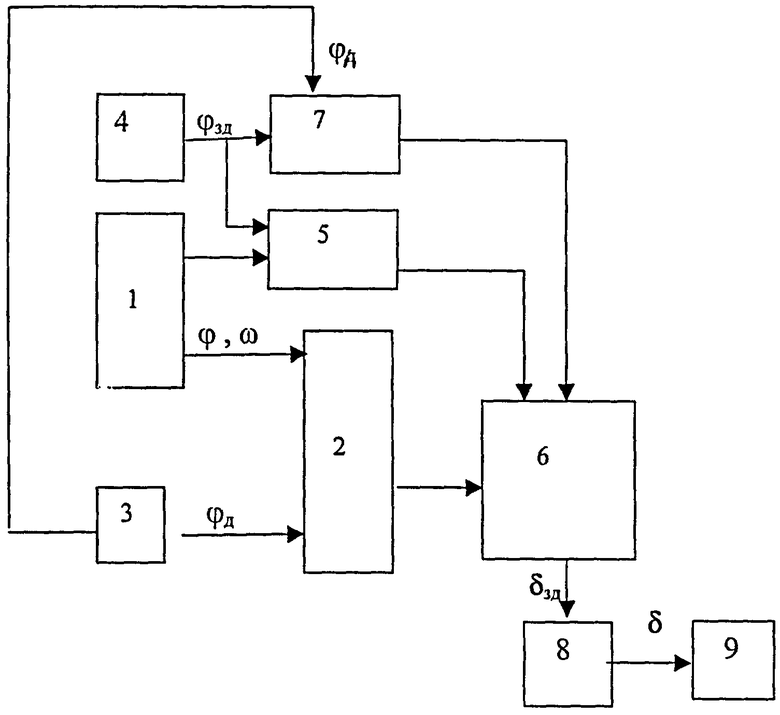
На чертеже приведена система автоматического управления движением (САУД) корабля с диагностикой измеряемой информации и перестройкой структуры управления, в которой реализован предложенный способ. Система содержит: 1 - измерительный блок САУД, 2 - блок диагноза, 3 - автономный измеритель курса, 4 - модуль задания программ управления, 5 - первый вычислитель, 6 - блок коррекции управления, 7 - второй вычислитель, 8 - исполнительные средства управления движением, 9 - корабль (объект управления).
При реализации рассматриваемой системы измерительный блок САУД 1 может быть типа «Мининавигация» (разработки ЦНИИ «Электроприбор», С.-Петербург); автономный измеритель курса 3 - это инерциальный измерительный модуль типа «ИСОН-1» также разработки ЦНИИ «Электроприбор»; вычислители 5, 7 можно реализовать на типовых микроконтроллерах; исполнительные средства управления движением 8 - корабельные рулевые приводы; блок коррекции управления 6 - электромагнитное реле.
Описание работы САУД корабля с диагностикой сбоя в модуле измеряемой информации и перестройкой архитектуры управления
Автоматическое управление движением корабля формируется в модуле задания программ управления 4 в виде задания сигнала направления движения корабля φзд, который поступает в первый вычислитель 5, в который также вводится текущий курс φ и сигнал угловой скорости ω из измерительного блока САУД 1. На выходе первого вычислителя 5 формируется управляющий сигнал исполнительными средствами управления движением (рулевым приводом) δзд в соответствии с зависимостью (2).
Управляющий сигнал δзд через блок коррекции управления 6 поступает на вход исполнительных средств управления движением 8, что приводит к движению корабля по заданному маршруту.
Достоверное выявление сбоя измерительного блока САУД осуществляется в блоке диагностики 2. С этой целью к блоку диагностики подключены сигналы: φ и ω из измерительного блока САУД 1 и φа из автономного измерителя курса 3 для формирования условия (3). При удовлетворении условий по зависимостям (3) в блоке диагностики формируется сигнал изменения структуры САУД, который поступает в блок коррекции управления 6, что вызывает срабатывание реле, которое отключает управляющий сигнал δзд от исполнительных средств управления движением 8, а сигнал корректируемого управления δзд корр, который формируется во втором вычислителе 7 в соответствии с зависимостью (2а), подключает к входу исполнительных средств управления движением 8. При этом несмотря на сбой в измерительном блоке САУД 1 будет сохранено автоматическое управление кораблем в соответствии с заданным маршрутом (текущий курс судна будет поддерживаться заданного значения: φ=φзд).
Проведенное моделирование с использованием электронной модели САУД с диагностикой и перестройкой структуры управления подтвердило эффективность использования предложенного способа диагностирования САУД с перестройкой архитектуры при сбое.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОТКАЗОБЕЗОПАСНОГО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2010 |
|
RU2432297C1 |
| АППАРАТУРА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ С БЛОКОМ ДИАГНОСТИКИ | 2009 |
|
RU2420424C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ С СОВЕТЧИКОМ СУДОВОДИТЕЛЮ | 2010 |
|
RU2432296C1 |
| СПОСОБ ОТКАЗОУСТОЙЧИВОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ ПО ГЛУБИНЕ | 2012 |
|
RU2513157C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ШИРОТЕ И ДОЛГОТЕ | 2012 |
|
RU2516885C2 |
| УСТРОЙСТВО И СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО РАСПИСАНИЮ | 2013 |
|
RU2525606C1 |
| СИСТЕМА ОТКАЗОУСТОЙЧИВОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2013 |
|
RU2536011C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2009 |
|
RU2388650C1 |
| СПОСОБ ОТКАЗОУСТОЙЧИВОГО УМЕРЕНИЯ КРЕНА СУДНА НА ПОДВОДНЫХ КРЫЛЬЯХ | 2013 |
|
RU2531999C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2010 |
|
RU2452655C1 |
Изобретение относится к технике управления движением корабля. Согласно предложенному способу производят непрерывное диагностирование исправности работы отдельных модулей системы автоматического управления движением (САУД) корабля и выявляют неисправности в работе измерительного блока САУД. Для сохранения работоспособности САУД в процессе автоматического управления движением корабля при появлении сбоя в ее отдельных модулях осуществляют автоматическую перестройку САУД. Способ позволяет выявлять неисправности в работе измерительного блока системы автоматического управления движением (САУД) корабля. Для сохранения работоспособности САУД при появлении отказа производится автоматическая перестройка архитектуры САУД. Изобретение обеспечивает полное сохранение процесса автоматического управления движением корабля при выявленном сбое в измерительном блоке системы, т.е. повышает отказобезопасность САУД. 1 ил.
Способ управления движением корабля с диагнозом сбоев, использующий измерительный блок системы автоматического управления движением (САУД), первый вычислитель, исполнительные средства управления движением и модуль задания программ управления, в котором формируют сигнал заданного значения угла курса φзд, который вводят в первый вычислитель, на вход которого также вводят сигнал текущего курса φ и угловой скорости ω из измерительного блока САУД, на выходе первого вычислителя формируют управляющий сигнал исполнительными средствами управления движением δзд, отличающийся тем, что дополнительно используют второй вычислитель, блок коррекции управления, автономный измеритель курса и блок диагностики, в который вводят сигналы текущего курса φа из автономного измерителя курса, текущего курса φ и угловой скорости ω из измерительного блока САУД, заданного значения угла курса φзд из модуля задания программ управления, в блоке диагностики формируют сигнал сбоя при выполнении двух условий:
модуль разности сигналов |φ-φa| больше величины С1,
модуль разности сигналов |φ-φзд| больше величины C2,
где С1, С2 - постоянные значения, задаваемые судоводителем, сигнал сбоя из блока диагностики вводят в блок коррекции управления, в который также вводят управляющий сигнал исполнительными средствами δзд из первого вычислителя, а сигнал φа из автономного измерителя курса и сигнал δзд из модуля задания программ управления вводят во второй вычислитель, где формируют сигнал корректируемого управления δзд.корр, который вводят на вход блока коррекции управления, сигнал с выхода блока коррекции вводят на исполнительные средства управления движением.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2301174C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ | 2004 |
|
RU2248914C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2224279C1 |

