Изобретение относится к области приборостроения и технике измерений, преимущественно - геодезического приборостроения и геодезических измерений, и, в частности, может быть использовано при установке измерительного прибора в рабочее положение, а именно при центрировании и горизонтировании прибора, т.е. при совмещении вертикальной оси вращения прибора с фиксированной на местности точкой, например с вершиной измеряемого горизонтального угла, и приведении вертикальной оси вращения прибора в отвесное положение. Целевое назначение заявляемых способа и устройства - исключение влияния погрешности центрирования измерительного прибора на результаты измеряемых прибором величин, определяемых его назначением. Преимущественное использование изобретения - в электронных геодезических приборах, в частности в электронных тахеометрах, светодальномерах, в лазерных приборах, задающих горизонтальные и вертикальные направления и др., для центрирования отражателей электронных геодезических приборов, визирных марок, целей, сигналов. Кроме того, указанное изобретение может быть использовано и при центрировании геодезических приборов оптического типа, например теодолитов, приборов вертикального проектирования и др.
Известен способ установки измерительного прибора в рабочее положение, предусматривающий выполнение принудительного центрирования измерительного прибора в фиксированной точке и последовательную его перестановку с точки на точку, в каждой из которых производится указанное принудительное центрирование (см., например, Борщ-Компониец В.И., Навитний A.M., Кныш Г.М. Маркшейдерское дело: Учебник для техникумов. - М.: Недра, 1985, с.119-120).
Недостатками известного способа являются сравнительно высокая трудоемкость производства измерений, связанная с необходимостью установки специального оборудования в каждой из фиксированных точек, а также использование для измерений нескольких штативов с целью переустановки на них теодолита и сигналов.
Известен также способ установки в рабочее положение измерительного прибора, закрепленного на штативе, при использовании которого в фиксированной точке местности выполняют предварительное центрирование и горизонтирование при установке одной из ножек штатива на некотором удалении от точки, в которой производится центрирование, а за две другие ножки штатив перемещают, добиваясь расположения вертикальной оси оптического центрира вблизи точки центрирования, наблюдая за указанными действиями в оптический центрир и наблюдая одновременно за горизонтальностью положения головки штатива. Затем, продолжая наблюдения за процессом центрирования и горизонтирования, выполняют дальнейшее перемещение двух ножек штатива, добиваясь возможно более точного совмещения вертикальной оси вращения прибора с фиксированной точкой. После этого ножки штатива укрепляют (на мягком грунте - вдавливанием в землю), продолжая центрирование прибора и при вдавливании их в землю. Затем, ослабив становой винт штатива, измерительный прибор перемещают на головке штатива до совмещения центра сетки оптического центрира с точкой центрирования и выполняют горизонтирование прибора (см., например, Федоров В.И., Титов А.И., Холдобаев В.А. Практикум по инженерной геодезии и аэрогеодезии: Учебное пособие для вузов. - М.: Недра, 1987, с.56, §21).
Недостатками указанного способа являются следующие: сравнительно большая трудоемкость при вынужденном центрировании и горизонтировании прибора методом последовательных приближений, поскольку при каждом приведении вертикальной оси вращения измерительного прибора в отвесное положение нарушается центрирование прибора. В свою очередь, центрирование прибора приводит к нарушению выполненного горизонтирования и т.д. Кроме этого остается неизвестным влияние остаточной величины погрешности центрирования.
В качестве прототипа выбран способ установки измерительного прибора в рабочее положение, предусматривающий предварительное центрирование и горизонтирование прибора в фиксированной точке местности, его окончательное горизонтирование, ориентирование коллимационной плоскости измерительного прибора по направлению одной из сторон измеряемого горизонтального угла, измерение высоты прибора, измерение величин линейного и углового элементов погрешности центрирования, измерение величин, предусмотренных назначением прибора, и аналитическое редуцирование измеренных прибором величин с учетом значений элементов погрешности центрирования (см. заявку №2008128890, дата подачи заявки 14.07.2008 г., дата публикации заявки 20.01.2010 г.).
Недостатками известного способа являются выполнение операции ориентирования коллимационной плоскости прибора по выбранному направлению, необходимость измерения двух элементов погрешности центрирования, линейного и углового, что приводит к увеличению затрат времени на производство работ по установке прибора в рабочее положение.
Известны устройства для установки измерительных приборов и вспомогательного оборудования в рабочее положение, содержащие посадочные места для однозначной установки измерительных средств при последующих измерениях, чем обеспечивается центрирование с высокой точностью (см., например, Геодезические методы исследования деформаций сооружений / А.К.Зайцев, С.В.Марфенко, Д.Ш.Михелев и др. - М.: Недра, 1991, с.29-32).
Недостатком указанных устройств является необходимость их стационарного закрепления на специальных устойчивых основаниях и в специальных посадочных приспособлениях, что исключает возможность их использования при производстве массовых измерений.
Известны устройства, используемые для установки измерительного прибора в рабочее положение, с помощью которых выполняют автоматическое центрирование измерительного прибора (теодолита) и сигналов (визирных целей, марок), состоящие из зрительной трубы, соединённой вращательно с баксой, которая вставляется во втулку подставки углоизмерительного прибора или сигнала, двух накрест расположенных цилиндрических уровней, прикреплённых к баксе. Использование указанного устройства предусматривает выполнение нивелирования (горизонтирования) и центрирования подставки, установленной на штатив, в которую затем устанавливают измерительный прибор или сигнал (см., например, Гусев Н.А. Маркшейдерско-геодезические инструменты и приборы. - М.: Недра, 1968, с.304-306).
Недостатками известных устройств является необходимость использования специального стационарного оборудования, что практически исключает возможность их использования при массовых измерениях, сравнительно длительный процесс центрирования, а также длительный процесс измерения, например, горизонтального угла, включающий переустановку оборудования со штатива на штатив. Кроме того, использование указанных устройств не позволяет измерить остаточную погрешность центрирования и учесть её в результатах основных измерений.
Известен оптический центрир, с помощью которого выполняют установку измерительного прибора в рабочее положение, состоящий из зрительной трубы, включающей объектив, окуляр, сетку нитей, призму, изменяющую направление оптической оси зрительной трубы, совмещенной с вертикальной осью вращения измерительного прибора, при этом коллимационная плоскость зрительной трубы совмещена с коллимационной плоскостью измерительного прибора либо образует с ней известный угол (см., например, Захаров А.И. Геодезические приборы: Справочник. - М.: Недра, 1989, с.46, рис.26 и 27).
Одним из недостатков указанного оптического центрира являются указанные выше недостатки в способе центрирования, осуществляемого методом последовательных приближений - большая трудоемкость при установке прибора в рабочее положение (см., например, Федоров В.И., Титов А.И., Холдобаев В.А. Практикум по инженерной геодезии и аэрогеодезии: Учебное пособие для вузов. - М.: Недра, 1987, с.56, §21). К другим недостаткам указанного оптического центрира можно отнести и то, что наблюдатель должен постоянно смотреть за результатом выполнения центрирования, наблюдая этот процесс в окуляр зрительной трубы центрира. Как известно, положение наблюдателя при таких действиях является сравнительно неудобным: совмещаются действия по наблюдению в зрительную трубу центрира и действия по перемещению (манипуляциям) ножек штатива. Кроме того, при использовании оптического центрира исключается автоматизация процесса центрирования, а также остаётся неизвестной остаточная погрешность центрирования.
В качестве прототипа выбрано устройство для установки измерительного прибора в рабочее положение в фиксированной точке местности, включающее систему построения изображения, датчики регистрации линейного и углового элементов погрешности центрирования, электронную систему регистрации и обработки информации, выполняющую, в частности, действия по аналитическому центрированию измерительного прибора с учетом значений элементов погрешности центрирования. Электронная система известного устройства содержит, в частности, блоки вычисления координат, расстояний, дирекционных углов, горизонтальных углов, направлений, взаимосвязанных между собой установленным алгоритмом решения задачи аналитического центрирования измерительного прибора (см. заявку №2008128890, дата подачи заявки 14.07.2008 г., дата публикации заявки 20.01.2010 г.). Использование указанного известного устройства предусматривает аналитическое центрирование измерительного прибора с учетом измеренных величин и величин линейного и углового элементов погрешности центрирования, через которые определяют поправки в измеренные прибором величины. При этом механическое центрирование выполняется на стадии предварительного центрирования (грубого, приближенного), при котором изображение точки местности, в которой выполняется установка прибора в рабочее положение, вводится в поле зрения оптической системы центрира, а затем продолжается до завершения измерения величин углового и линейного элементов погрешности центрирования.
Недостатком указанного известного устройства является необходимость механических действий наблюдателя при определении двух разнородных элементов погрешности центрирования, линейного и углового, а именно совмещение коллимационной плоскости измерительного прибора (оптического центрира) с направлением линейного элемента, совмещение зафиксированной на местности точки с центральным индексом сетки зрительной трубы центрира. При выполнении указанных действий наблюдатель должен постоянно смотреть в окуляр зрительной трубы центрира, что, в известной степени, является для него неудобным и сравнительно утомительным. Кроме того, предусмотренное известным устройством механическое измерение двух погрешностей центрирования приводит к необходимости введения в конструкцию прибора в пределах его осевой системы дополнительных измерительных винтов (маховичков), что вызывает определенные трудности в технологии изготовления прибора, поскольку, как известно, оптические центриры электронных тахеометров, теодолитов располагаются непосредственно в осевых системах, являющихся весьма ответственными механическими частями измерительных приборов указанного типа.
Для устранения недостатков, указанных для известных способов установки измерительного прибора в рабочее положение, предлагается способ установки измерительного прибора в рабочее положение в фиксированной точке местности, включающий предварительное центрирование и горизонтирование измерительного прибора, его окончательное горизонтирование, выбор условной системы координат, измерение высоты измерительного прибора, ориентирование коллимационной плоскости измерительного прибора по направлению линейного элемента погрешности центрирования, регистрацию направления и величины изображения линейного элемента, вычисление линейного элемента погрешности центрирования, измерение в точке стояния величин, предусмотренных назначением прибора, и редуцирование указанных величин с учетом погрешности центрирования, при использовании которого (способа) перед выполнением предварительного центрирования и горизонтирования измерительного прибора в фиксированной точке местности размещают источник электромагнитного излучения, выполняют окончательное горизонтирование, регистрируют значение направления и величину изображения линейного элемента погрешности центрирования и вычисляют фактическое значение линейного элемента погрешности центрирования с учетом изменения высоты измерительного прибора относительно ее паспортного значения, выполняют измерения, предусмотренные назначением измерительного прибора, вычисляют координаты фиксированной и наблюдаемых точек и вычисляют определяемые величины, предусмотренные назначением прибора, с учетом величины погрешности центрирования.
В предлагаемом способе предусматривается, что измерение величин, предусмотренных назначением измерительного прибора, выполняют после окончательного горизонтирования на любом этапе работы в точке стояния до вычисления координат наблюдаемых точек.
В предлагаемом способе начало условной системы координат и одну из ее осей совмещают с вертикальной осью вращения измерительного прибора, а для другой из ее осей назначают любой из возможных отсчетов (направлений) по горизонтальному кругу измерительного прибора, в том числе и отсчет, равный нулю.
Для устранения недостатков, приведенных для указанных известных устройств, предлагается устройство для установки измерительного прибора в рабочее положение, содержащее систему построения изображения, датчик измерения погрешности центрирования, электронную систему регистрации и обработки информации, упомянутая система построения изображения которого содержит в своем пространстве предметов источник электромагнитного излучения, а в своем пространстве изображений содержит датчик положения центра идентификационного пятна от источника электромагнитного излучения, при этом электронная система регистрации и обработки информации выполнена в виде совокупности функциональных блоков, связанных друг с другом в соответствии с установленным алгоритмом редуцирования измеренных величин, предусмотренных назначением измерительного прибора, с учетом погрешности центрирования, и установлена с возможностью приема сигналов от упомянутого датчика положения центра идентификационного пятна.
В предлагаемом устройстве ось системы построения изображения совмещена с вертикальной осью вращения измерительного прибора.
Датчик положения центра идентификационного пятна от источника электромагнитного излучения может быть выполнен в виде двухкоординатной матрицы приемников электромагнитного излучения, одна из осей которой, перпендикулярная к поверхности размещения упомянутых приемников излучения, совмещена с вертикальной осью вращения измерительного прибора, либо выполнен в виде линейной матрицы приемников электромагнитного излучения, продольная ось которой перпендикулярна вертикальной оси вращения измерительного прибора и совмещена с положением коллимационной плоскости измерительного прибора либо образует с ней известный угол, при этом поворот упомянутой матрицы синхронизирован с поворотом коллимационной плоскости измерительного прибора, при этом линейная матрица приемников электромагнитного излучения выполнена с возможностью автономного поворота на регистрируемый угол в плоскости, перпендикулярной продольной оси системы построения изображения, относительно коллимационной плоскости измерительного прибора, соответствующий максимальному сигналу от группы приемников электромагнитного излучения, попавших в область идентификационного пятна изображения источника электромагнитного излучения.
Электронная система регистрации и обработки информации предлагаемого устройства снабжена функциональными блоками, в совокупность которых входят блок позиционирования и определения координат идентификационного пятна на датчике положения центра идентификационного пятна от источника электромагнитного излучения, блок вычисления линейного элемента погрешности центрирования, блок вычисления координат фиксированной точки местности и наблюдаемых точек, блок вычисления дирекционных углов, блок ввода высоты измерительного прибора, блок ввода измеренных расстояний, блок ввода измеренных направлений, блок вычисления определяемых расстояний, блок вычисления определяемых горизонтальных углов, блок вычисления определяемых направлений и запоминающее устройство, при этом упомянутый блок позиционирования и определения координат центра идентификационного пятна установлен с возможностью приема сигнала от датчика положения центра идентификационного пятна и передачи сигнала в блок вычисления линейного элемента погрешности центрирования, который установлен с возможностью приема сигнала из блока ввода высоты измерительного прибора и передачи сигнала в блок вычисления координат фиксированной точки и наблюдаемых точек, который, в свою очередь, установлен с возможностью приема сигналов из блоков ввода измеренных расстояний и ввода измеренных направлений и передачи сигналов в блоки вычисления дирекционных углов и вычисления определяемых расстояний, упомянутый блок вычисления дирекционных углов установлен с возможностью передачи сигнала в блок вычисления определяемых горизонтальных углов, а запоминающее устройство установлено с возможностью приема сигналов из блоков вычисления определяемых расстояний, вычисления определяемых горизонтальных углов и вычисления дирекционных углов, при этом блок вычисления дирекционных углов и блок вычисления определяемых направлений совмещены.
В другом варианте предлагаемого устройства электронная система регистрации и обработки информации снабжена функциональными блоками, в совокупность которых входят блок позиционирования и определения координат идентификационного пятна на датчике положения центра идентификационного пятна, блок вычисления линейного элемента погрешности центрирования, блок вычисления координат фиксированной точки местности и наблюдаемых точек, блок вычисления дирекционных углов, блок ввода высоты измерительного прибора, блок ввода измеренных расстояний, блок ввода измеренных направлений, блок вычисления определяемых расстояний, блок вычисления определяемых горизонтальных углов, блок вычисления определяемых направлений и запоминающее устройство, при этом упомянутый блок позиционирования и определения координат центра идентификационного пятна установлен с возможностью приема сигналов от датчика положения центра идентификационного пятна и передачи сигнала в блок вычисления линейного элемента погрешности центрирования, который установлен с возможностью приема сигнала из блока ввода высоты измерительного прибора и передачи сигнала в блок вычисления координат фиксированной точки и наблюдаемых точек, который, в свою очередь, установлен с возможностью приема сигналов из блоков ввода измеренных расстояний и ввода измеренных направлений и передачи сигналов в блоки вычисления дирекционных углов и вычисления определяемых расстояний, упомянутый блок вычисления дирекционных углов установлен с возможностью передачи сигнала в блок вычисления определяемых горизонтальных углов и передачи сигнала в блок вычисления определяемых направлений, который установлен с возможностью приема сигнала из блока ввода измеренных направлений, а запоминающее устройство установлено с возможностью приема сигналов из блоков вычисления определяемых расстояний, вычисления определяемых горизонтальных углов и вычисления определяемых направлений.
В третьем варианте предлагаемого устройства электронная система регистрации и обработки информации снабжена функциональными блоками, в совокупность которых входят блок позиционирования и определения координат идентификационного пятна на датчике положения центра идентификационного пятна от источника электромагнитного излучения, блок вычисления линейного элемента погрешности центрирования, блок вычисления координат фиксированной точки местности и наблюдаемых точек, блок вычисления дирекционных углов, блок ввода высоты измерительного прибора, блок ввода измеренных расстояний, блок ввода измеренных направлений, блок вычисления определяемых расстояний, блок вычисления определяемых горизонтальных углов, блок вычисления определяемых направлений и запоминающее устройство, при этом упомянутый блок позиционирования и определения координат центра идентификационного пятна установлен с возможностью приема сигналов от датчика положения центра идентификационного пятна и передачи сигнала в блок вычисления линейного элемента погрешности центрирования, который установлен с возможностью приема сигнала из блока ввода высоты измерительного прибора и передачи сигнала в блок вычисления координат фиксированной точки и наблюдаемых точек, который, в свою очередь, установлен с возможностью приема сигналов из блоков ввода измеренных расстояний и ввода измеренных направлений и передачи сигналов в блоки вычисления дирекционных углов и вычисления определяемых расстояний, упомянутый блок вычисления дирекционных углов установлен с возможностью передачи сигнала в блок вычисления определяемых направлений, который установлен с возможностью приема сигнала из блока ввода измеренных направлений и передачи сигнала в блок вычисления определяемых горизонтальных углов, а запоминающее устройство установлено с возможностью приема сигналов из блоков вычисления определяемых расстояний, вычисления определяемых горизонтальных углов и вычисления определяемых направлений.
Возможны и другие варианты электронной системы предлагаемого устройства, в которых поставленная задача решается при реализации других алгоритмов расчета, но с получением аналогичных результатов.
Источник электромагнитного излучения предлагаемого устройства может быть выполнен переносным с возможностью временного его размещения в фиксированной точке местности и может быть оборудован системой доставки, в частности штангой, например, телескопического типа.
Кроме того, источник электромагнитного излучения может быть снабжен отражателем диффузионного типа, выполненным с возможностью временного его размещения в фиксированной точке местности и оборудованным системой доставки, в частности штангой, например, телескопического типа, при этом источник электромагнитного излучения может быть размещен непосредственно на измерительном приборе или на вспомогательном оборудовании, например на штативе измерительного прибора.
Для исключения или ослабления засветок от внешних источников упомянутый выше источник электромагнитного излучения может быть снабжен модулятором электромагнитного излучения и/или фильтром электромагнитного излучения.
Для повышения качества изображения идентификационного пятна от источника электромагнитного излучения система построения изображения и датчик положения центра идентификационного пятна от источника электромагнитного излучения установлены с возможностью взаимного перемещения друг относительно друга с учетом изменения высоты измерительного прибора относительно ее паспортного значения.
Предлагаемое устройство может быть полностью или частично конструктивно совмещено с измерительным прибором.
Необходимые пояснения по осуществлению алгоритма аналитического редуцирования погрешностей центрирования, схема предлагаемого устройства и особенности некоторых частей этой схемы, а также необходимые пояснения по коррекции погрешности центрирования приведены на фиг.1, 2, 3, 4, 5, 6, 7, 8, 9 и 10.
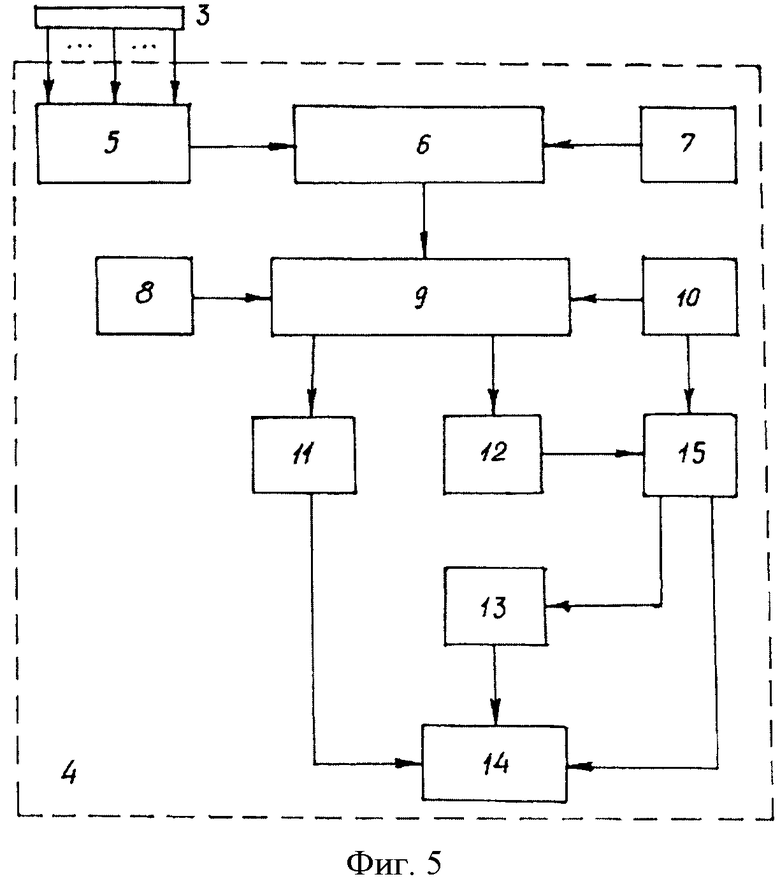
На фиг.1 показана схема, поясняющая алгоритм вычисления и введения поправок в измеренные прибором (в частности, электронным тахеометром) величины с учетом погрешности центрирования.
Обозначения, принятые на фиг.1:
А, В и С - точки местности, определяющие величину измеряемого (определяемого) горизонтального угла, расстояний, а также определяющие направления (отсчеты по системе горизонтального круга измерительного прибора); указанные точки фиксированы на местности;
Т - проекция вертикальной оси вращения измерительного прибора на горизонтальную плоскость;
βО - определяемый горизонтальный угол;
β - измеренный горизонтальный угол;
NTB и NTC - измеренные горизонтальные направления (отсчеты по системе горизонтального круга измерительного прибора) из точки Т соответственно на точки В и С;
NАB и NАC - определяемые горизонтальные направления (определяемые отсчеты по горизонтальному кругу измерительного прибора) из точки А соответственно на точки В и С;
Nx - любое направление (отсчет по системе горизонтального круга измерительного прибора), соответствующее положению оси Тх условной системы прямоугольных координат Txyz (в частности, при ориентировании указанной оси на нулевой отсчет системы горизонтального круга Nx = 0);
NTA - направление (отсчет по системе горизонтального круга измерительного прибора) линейного элемента погрешности центрирования;
Txyz - условная прямоугольная система координат, оси Тх которой может быть придано любое направление в пределах возможных отсчетов по системе горизонтального круга измерительного прибора, в частности может быть (для упрощения в расчетах) выбран нулевой отсчет системы горизонтального круга измерительного прибора; ось Tz совпадает с вертикальной осью вращения измерительного прибора, т.е. перпендикулярна плоскости чертежа фиг. 1;
l - линейный элемент погрешности центрирования (расстояние в горизонтальной плоскости между точками А и Т);
LTB и LTC - измеренные расстояния;
LAB и LAC - определяемые расстояния;
αАВ и αАС - условные дирекционные углы соответствующих определяемых направлений (указанные дирекционные углы вычисляют при аналитической обработке результатов измерений);
αTB и αTC - условные дирекционные углы соответствующих измеренных направлений (указанные дирекционные углы вычисляют при аналитической обработке результатов измерений);
αTA - дирекционный угол направления линейного элемента погрешности центрирования;
xA и yA - прямоугольные координаты фиксированной на местности точки А в условной системе прямоугольных координат Txyz.
На фиг.2 представлена схема устройства, предназначенного для осуществления способа установки измерительного прибора в рабочее положение в фиксированной на местности точке.
Обозначения, приведенные на фиг.2:
1 - система построения изображения (в последующем, для сокращения, используется эквивалентное обозначение - система 1);
2 - источник электромагнитного излучения;
3 - датчик положения центра идентификационного пятна от источника электромагнитного излучения (в последующем, для сокращения, используется эквивалентное обозначение - датчик положения 3);
4 - электронная система регистрации и обработки информации (в последующем, для сокращения, используется эквивалентное обозначение - электронная система 4);
А - фиксированная на местности точка, в которой выполняется установка измерительного прибора в рабочее положение (в указанной точке установлен источник излучения 2);
А' - проекция точки А (источника электромагнитного излучения 2) на датчике положения 3; центр идентификационного пятна от источника электромагнитного излучения 2;
Т - точка, являющаяся проекцией вертикальной оси вращения измерительного прибора на горизонтальную плоскость;
T' - проекция по отвесной линии точки Т на датчик положения 3;
l - линейный элемент погрешности центрирования (пространство предмета системы 1);
l' - изображение линейного элемента в плоскости матрицы 3 приемников излучения (пространство изображения системы 1);
h - высота измерительного прибора.
На фиг.3, 4 и 5 показаны функциональные блоки электронной системы 4 и их взаимосвязь в соответствии с установленным алгоритмом решения задачи.
Обозначения, принятые на фиг.3, 4 и 5:
3 - датчик положения (см. фиг.2);
4 - электронная система (см. фиг. 2);
5 - блок позиционирования и определения координат центра идентификационного пятна от источника электромагнитного излучения 2 на датчике положения 3 (в последующем используется эквивалентное обозначение - блок позиционирования 5);
6 - блок вычисления линейного элемента погрешности центрирования (в последующем используется эквивалентное обозначение - блок вычисления линейного элемента 6);
7 - блок ввода высоты измерительного прибора (в последующем используется эквивалентное обозначение - блок ввода высоты 7);
8 - блок ввода измеренных расстояний;
9 - блок вычисления координат фиксированной точки и наблюдаемых точек (в последующем используется эквивалентное обозначение - блок вычисления координат 9);
10 - блок ввода измеренных направлений;
11 - блок вычисления определяемых расстояний;
12 - блок вычисления дирекционных углов;
13 - блок вычисления определяемых горизонтальных углов;
14 - запоминающее устройство;
15 - блок вычисления определяемых направлений.
На фиг.6 и 7 представлены соответственно схемы двухкоординатной матрицы и линейной матрицы приемников электромагнитного излучения, выполняющих функцию датчика положения 3.
Обозначения на фиг.6 и 7:
3 - датчик положения (матрица приемников электромагнитного излучения, в последующем - матрица 3);
16 - элементарный приемник излучения;
17 - идентификационное пятно от источника излучения 2, в плоскости двухкоординатной матрицы 3, на линейной матрице 3, образованное через систему 1 от источника электромагнитного излучения 2 (см. фиг.2);
Т'хMуM - условная прямоугольная система координат матрицы 3, начало координат которой совмещено с вертикальной осью вращения измерительного прибора;
T'xy - проекция условной системы прямоугольных координат Тху в плоскости матрицы 3, центр которой совпадает с точкой T';
хЦ и уЦ - прямоугольные координаты центра идентификационного пятна 17 в условной прямоугольной системе координат Т'хMуM.
Остальные обозначения приведены на фиг.1 и 2.
На фиг.8 приведена схема, поясняющая алгоритм коррекции измеренного значения линейного элемента погрешности центрирования. Обозначения на фиг.8 (обозначения поз.1, 2 и 3 - см. на фиг.2):
А и Т - точки местности (см. обозначения на фиг.1);
А' и Т' - изображение точек А и Т через систему 1 (А'1 - при sO, на датчике положения 3; А2' - при s=sO+Δs; А2'' - при s=sO+Δs на датчике положения 3);
F и F' - соответственно точки переднего и заднего фокусов системы 1;
ƒ и ƒ' - переднее и заднее фокусные расстояния системы 1;
s - расстояние от предмета (источника излучения 2) до переднего фокуса системы 1;
sO - паспортное расстояние от предмета до переднего фокуса системы 1;
Δs - изменение паспортного расстояния sO;
s' - расстояние от изображения до заднего фокуса системы 1;
sO' - паспортное расстояние от датчика положения 3 до заднего фокуса системы 1;
l - линейный элемент погрешности центрирования в пространстве предмета (l1 - для sO; l2 - для s=sO+As);
l' и l'' - размер изображения линейного элемента погрешности центрирования в пространстве изображения системы 1 (l' - при sO, на датчике положения 3; l2' - при s=sO+Δs; l2'' - при s=sO+Δs на датчике положения 3).
На фиг.9 и 10 представлены варианты размещения источника электромагнитного излучения при проведении измерений.
Обозначения, принятые на фиг. 9 и 10:
2 - источник электромагнитного излучения (см. фиг.2);
18 - средство доставки источника электромагнитного излучения или отражателя 21 к фиксированной точке А местности (штанга телескопического типа);
19 - измерительный прибор;
20 - штатив;
21 - отражатель диффузионного типа;
Т - точка стояния измерительного прибора (см. фиг.1 и 2).
Рассмотрим схему, поясняющую аналитическое центрирование измерительного прибора, приведенную на фиг.1.
При измерении горизонтального угла βO и расстояний LAB и LAC проекция вертикальной оси вращения измерительного прибора не совпала с вершиной А измеряемого угла, а оказалась в точке Т, что фактически приводит к измерению другого угла (β), других расстояний (LTB и LTC) и других направлений (NTB, NTC и NTA).
Выберем условную систему координат Txyz, оси Тх которой соответствует произвольное направление Nx. В рабочем положении плоскость хТу является горизонтальной, а ось Tz направлена по отвесной линии в точке стояния, совпадающей с вертикальной осью вращения измерительного прибора.
Из решения прямой геодезической задачи (см., например, Афанасьев В.Г., Егоров А.П. Геодезия и маркшейдерское дело в транспортном строительстве. М.: Недра, 1978, § 14, с.21-23) найдем координаты точек А, В и С в указанной системе координат (очевидно, что xT = 0 и yT = 0):

В формулах (1) разности измеренных направлений и произвольного направления Nx оси Тх определяют соответствующие условные дирекционные углы в принятой системе прямоугольных координат Txyz:

Поскольку система координат выбрана произвольной, то можно условно, для простоты дальнейших вычислений, считать, что ось Тх ориентирована на нулевой отсчет системы горизонтального круга измерительного прибора, т.е. Nx = 0. Далее будет показано, что это упрощает схему электронной системы 4. В этом случае формулы (1) запишутся в виде:

Отсюда следует, что при указанном условии значения направлений (измеренных и определяемых) и значения соответствующих дирекционных углов совпадают:

Из решения обратной геодезической задачи найдем условные дирекционные углы αAB и αAC (т.е. и определяемые направления NAB и NAC соответственно) и определяемые расстояния LAB и LAC при условии, что направление Nx = 0:


Если произвольное направление Nx≠0, то формулы (5) и (6) примут общий вид:


Далее вычислим значение определяемого горизонтального угла как разность соответствующих дирекционных углов определяемых направлений, полученных по формулам (5) или (7):

Очевидно, что значение определяемого горизонтального угла для поставленных условий, т.е. при Nx = 0, можно также вычислить по формуле

в соответствии с формулами (4).
Если Nx≠0, то значения определяемых направлений вычисляют в соответствии с формулами (2) и схемой фиг.1 по формулам:

В приведенной схеме определяемые направления находятся легко. Часто это и требуется делать, когда при точных и высокоточных измерениях выполняют измерения в центральных системах, т.е. в точке стояния определяют сразу несколько направлений, а затем их уравнивают и вычисляют уравненные значения определяемых горизонтальных углов по формуле (10) с учетом уравненных значений направлений.
Таким образом, аналитическое редуцирование измеренных прибором величин, предусмотренных его назначением (в данном случае - расстояний, горизонтальных углов и направлений), позволяет исключить погрешность центрирования измерительного прибора практически любой ее величины. В используемых электронных тахеометрах, например, система построения изображения (оптический центрир) обеспечивает обзор в пространстве предмета в линейных размерах до 50 мм. Примерно такой и может быть линейная погрешность центрирования измерительного прибора, которая в дальнейшем будет учтена при редуцировании измеренных величин.
Рассмотрим схему (фиг.8), поясняющую коррекцию измеренного линейного элемента погрешности центрирования.
На схеме показан ход лучей из пространства предмета в пространство изображения системы 1, где установлен датчик положения 3.
Рассмотрим два случая при равных значениях линейного элемента погрешности центрирования (l1=l2):
- источник электромагнитного излучения 2 находится в точке А на паспортном значении расстояния sO от переднего фокуса системы 1;
- источник электромагнитного излучения 2 находится в точке А на расстоянии от переднего фокуса системы 1, отличном от паспортного значения на величину Δs, равную разности текущего значения высоты h измерительного прибора и паспортного значения высоты hO измерительного прибора, т.е.:

При этом в том и другом случаях датчик положения 3 находится на паспортном расстоянии sO' от заднего фокуса системы 1.
Величина измеренного отрезка AT = l1 в пространстве предмета определится через измеренный отрезок в пространстве изображений l1' по формуле:

где КО - коэффициент увеличения, равный обратному значению коэффициента увеличения системы 1:

В данном случае значение КО также является паспортным значением коэффициента увеличения предлагаемого устройства.
Поскольку при установке измерительного прибора в рабочее положение величина отрезка sО в абсолютном большинстве случаев окажется иной (s=sO±Δs), то изменится и значение коэффициента увеличения для изображения отрезка l2'' в плоскости матрицы приемников излучения.
Предварительно найдем:

где К - текущее значение коэффициента увеличения.
Для центра А2'' идентификационного пятна 17 на датчике положения 3 по отношению к отрезку l2 ' можно определить коэффициент искажения

Поскольку, как это следует из геометрии схемы,

то, после подстановки полученных параметров в формулу (16), получим:

Таким образом, с учетом приведенных выражений для К и Kl, формулу (15) можно записать в виде:

Величина измеряемого датчиком положения 3 изображения l' или l'' линейного элемента погрешности центрирования определяется в условной системе координат T'хMуMzM, начало которой совпадает с проекцией Т' точки Т, по формуле обратной геодезической задачи:

при использовании в качестве датчика положения 3 двухкоординатной матрицы приемников излучения (см. фиг.6), или непосредственно измеренное расстояние при использовании в качестве датчика положения 3 линейной матрицы приемников излучения (см. фиг.7).
Для исключения расфокусировки изображения источника электромагнитного излучения на датчике положения 3 при изменениях высоты измерительного прибора относительно ее паспортного значения система 1 и датчик положения 3 установлены с возможностью взаимного перемещения друг относительно друга. При этом перемещение указанных элементов устройства в направлении вертикальной оси вращения измерительного прибора должно составлять

Предположим, что ƒ=ƒ'=100 мм, sO=1100 мм, Δs=+200 мм, что соответствует увеличению расстояния до предмета (источника электромагнитного излучения). Тогда Δs'=1,4 мм. Это соответствует для компенсации расфокусировки перемещению датчика положения 3 по направлению к системе 1 на 1,4 мм либо перемещению на такую же величину системы 1 в сторону датчика положения 1.
Предположим, что для тех же величин фокусных расстояний и значения sO Δs=-200 мм, что соответствует уменьшению расстояния до предмета по сравнению с его паспортным значением. Тогда Δs'=2,0 мм. Это соответствует для компенсации расфокусировки перемещению датчика положения 3 от системы 1 либо перемещению от датчика положения 3 системы 1 на 2,0 мм.
В указанных случаях, т.е. при фиксируемых перемещениях датчика положения 3 и системы 1, определяемых изменениями высоты измерительного прибора относительно ее паспортного значения, коррекцию измеренного значения изображения линейного элемента погрешности центрирования в пространстве изображений на датчике положения 3 выполняют по формуле (15), т.е. только с учетом текущего значения коэффициента увеличения:

где Δs вычисляют по формуле (12).
Для обеспечения необходимых расчетов по установленному алгоритму редуцирования измеренных прибором величин в памяти прибора должны храниться следующие значения:
- паспортное значение высоты hO прибора;
- паспортное значение sO, соответствующее паспортному значению высоты прибора hO,
- фокусные переднее и заднее расстояния системы 1;
- паспортное значение коэффициента увеличения КO системы 1 (его обратная величина).
Осуществление способа установки измерительного прибора в рабочее положение в фиксированной на местности точке производится следующим образом.
Устанавливают в фиксированной точке А местности источник электромагнитного излучения 2. Измерительный прибор 19 предварительно центрируют и горизонтируют в фиксированной на местности точке А, что заключается в примерном совмещении вертикальной оси вращения с фиксированной точкой (наблюдается по дисплею измерительного прибора) и примерном горизонтировании по положению головки штатива 20. Выполняют окончательное горизонтирование измерительного прибора 19, т.е. приводят вертикальную ось вращения прибора в отвесное положение.
В общем случае проекция вертикальной оси измерительного прибора не совпадет с точкой А, а окажется в точке Т.
Выбирают условную систему координат, что заключается в произвольном задании значения направления (отсчета по системе горизонтального круга измерительного прибора) для оси Тх системы координат; при этом возможен однозначный во всех случаях выбор значения указанного направления, равного нулю.
Измеряют высоту прибора h от фиксированной точки А до установленной механической части измерительного прибора 19 и фиксируют ее значение в электронной системе регистрации и обработки информации 4 в блоке ввода 7 высоты измерительного прибора.
Устанавливают в фиксированную точку А источник электромагнитного излучения 2 либо отражатель 21 диффузионного типа, входящий в систему источника электромагнитного излучения (см. фиг.9 и 10).
Выполняют измерение направления и величины изображения линейного элемента погрешности центрирования.
При использовании линейной матрицы приемников излучения после окончательного горизонтирования измерительного прибора его коллимационную плоскость устанавливают в таком направлении, пока координата уЦ центра идентификационного пятна 17 не станет равной нулю либо пока не установится максимальный сигнал от группы приемников излучения, попавших в пределы идентификационного пятна.
Вычисляют фактическое значение линейного элемента погрешности центрирования с учетом изменения высоты измерительного прибора относительно ее паспортного значения (операция выполняется функциональным блоком 5 электронной системы 4 регистрации и обработки информации).
Выполняют необходимые измерения, предусмотренные назначением измерительного прибора, что заключается в определении направлений на все наблюдаемые точки и в определении до них значений измеренных расстояний.
Далее электронной системой 4 регистрации и обработки информации по установленному алгоритму производится вычисление координат фиксированной точки и координат наблюдаемых точек в выбранной условной системе координат и вычисление определяемых величин, предусмотренных назначением прибора, с учетом редукции линейного элемента погрешности центрирования.
Предлагаемое устройство для установки измерительного прибора в рабочее положение (фиг.1, 2, 3, 4 и 5) работает следующим образом.
В фиксированной на местности точке А устанавливают источник излучения 2 и выполняют предварительное центрирование и горизонтирование измерительного прибора, заключающееся в приведении изображения от источника излучения 2 в поле зрения, определяемое геометрическими параметрами датчика положения 3, что можно контролировать по дисплею измерительного прибора. Выполняют окончательное горизонтирование измерительного прибора, наблюдая по дисплею измерительного прибора за положением идентификационного пятна 17 от источника электромагнитного излучения в пределах датчика положения 3. Определяют высоту (h) измерительного прибора от фиксированной точки местности, в которой выполняют установку прибора в рабочее положение, до установленной механической части измерительного прибора. Полученное значение высоты вводят в память измерительного прибора.
После выполнения окончательного горизонтирования и размещения источника электромагнитного излучения в фиксированной на местности точке А блок позиционирования 5 сканирует по чувствительным элементам (приемникам излучения) датчика положения 3, идентифицирует область изображения источника электромагнитного излучений 2 и производит вычисление координат хЦ и уЦ центра идентификационного пятна в принятой системе координат. Далее полученные координаты передаются из блока 5 в блок 6 вычисления линейного элемента. В этот же блок 6 поступает и значение текущей высоты h измерительного прибора из блока ввода 7 высоты измерительного прибора. Блок 6 выполняет вычисление действительного значения линейного элемента l погрешности центрирования: предварительно определяется значение разности расстояния до предмета относительно его паспортного значения по формуле (12), затем (или одновременно с этим) производится вычисление величины изображения линейной погрешности центрирования по формуле (20) и окончательно - вычисление фактического значения линейного элемента погрешности центрирования по формуле (19). Полученная величина линейного элемента погрешности центрирования поступает из блока 6 в блок 9 вычисления координат фиксированной точки и наблюдаемых точек, в который одновременно с измерениями поступает информация о значениях измеренных направлений и расстояний соответственно из блоков 8 и 10. Блок 9 по алгоритму формул (1) или (3) выполняет расчет значений соответствующих координат точек в принятой условной системе координат. Полученные значения координат точек из блока 9 поступают в блок 11 вычисления определяемых расстояний, который по алгоритму формул (6) или (8) производит их вычисление, и в блок 12 вычисления дирекционных углов определяемых направлений, в котором по формулам (5) или (7) производится вычисление значений искомых дирекционных углов. Информация (значения дирекционных углов) из блока 12 поступает в блок 13 вычисления определяемых горизонтальных углов, полученные по формуле (9) значения которых поступают в запоминающее устройство 14. В это же запоминающее устройство 14 направляется и информация о значениях редуцированных определяемых расстояний из блока 11. В схеме, приведенной на фиг.4 с учетом условия Nx=0, значения определяемых направлений совпадают со значениями определяемых дирекционных углов, в связи с чем информация из блока 12 передается как определяемое направление в запоминающее устройство 14.
Приведенная блок-схема устройства поясняет только возможный алгоритм решения задачи аналитического центрирования измерительного прибора, указанный в формулах (1), (3), (5), (6), (7), (8), (9). Возможно, например, введение в блок 5 системы вычисления величины изображения линейного элемента погрешности центрирования, что выполняется в приведенной блок-схеме в блоке 6. Коррекцию величины линейного элемента погрешности центрирования из-за изменения высоты измерительного прибора можно вводить, например, непосредственно в измеренные значения координат в блоке 5, в связи с чем на блок-схеме это отразилось бы дополнительной связью блока 7 с блоком 5. Возможно, например, разделение блока 6 на несколько самостоятельных блоков: блок вычисления величины изображения линейного элемента погрешности центрирования по формуле (20); блок коррекции изображения линейного элемента погрешности центрирования; блок масштабирования линейного элемента погрешности центрирования с учетом текущего значения коэффициента увеличения. Возможны и другие изменения в блок-схеме, функциональные действия элементов которой приведут к тому же результату, что и при использовании приведенной блок-схемы.
В качестве возможных вариантов рассмотрим блок-схему вычисления определяемых направлений (см. фиг.4 и 5).
Работа части блок-схемы, рассмотренной выше, изображенной на фиг.4, осуществляется следующим образом. Информация из блока 9 вычисления координат фиксированной и наблюдаемых точек поступает в блок 12 вычисления дирекционных углов, в котором по алгоритму формул (7) производится вычисление их значений. Далее из блока 12 информация передается в блок 13 вычисления определяемых горизонтальных углов по формулам (9) и в блок 15 вычисления определяемых направлений, в который дополнительно поступает информация из блока ввода измеренных направлений 10. Блок 15 выполняет вычисление определяемых направлений по формулам (11). Затем значения всех определяемых величин поступают в запоминающее устройство 14.
Отличие второго варианта части блок-схемы устройства (см. фиг.5) от приведенного выше (фиг.4) заключается в том, что блок 12 вычисления дирекционных углов установлен с возможностью приема сигнала из блока 9 вычисления координат фиксированной точки и наблюдаемых точек и передачи сигнала в блок 15 вычисления определяемых направлений по формулам (11), для чего в этот же блок направляется информация из блока 10 ввода измеренных направлений. Далее информация из блока 15 направляется в блок 13 вычисления определяемых углов по формулам (10), после чего в запоминающее устройство 14 поступает информация о значениях всех определяемых величин.
Электронная система обработки информации либо отдельные ее части могут быть полностью или частично конструктивно объединены с аналогичными функциональными блоками и системами измерительного прибора. Так, например, электронные блоки вычисления координат, дирекционных углов, горизонтальных углов, расстояний, запоминающее устройство предлагаемого устройства идентичны соответствующим блокам измерительного устройства. Возможно также объединение, например, системы построения изображения предлагаемого устройства с системой оптического центрира измерительного прибора и др.
Использование способа центрирования с приведенным алгоритмом аналитического редуцирования измеряемых величин с учетом погрешностей центрирования, а также устройства, предназначенного для осуществления данного способа, позволит значительно уменьшить трудоемкость при установке измерительного прибора, поскольку величины линейных элементов центрирования не устраняют путем механических действий с прибором, а также аналогичных действий с механизмами центрира, а определяют их величины и соответствующее угловое положение автоматически непосредственно в процессе измерений в выбранной произвольной системе координат и исключают влияние погрешности центрирования введением соответствующих поправок во все измеренные величины, определяемые назначением прибора. Точность центрирования при этом определяется не величинами элементов погрешности центрирования, а только погрешностями определения этих элементов. Например, величина линейного элемента погрешности центрирования может быть равной 30-40 мм (и более) при требуемой точности механического центрирования, равной 0,2-0,5 мм.
Таким образом, предлагаемые способ и устройство для установки измерительного прибора в рабочее положение позволят существенно автоматизировать процесс аналитического центрирования измерительного прибора с вычислением значений определяемых величин (направлений, горизонтальных углов, расстояний), точность которых определяется точностью измерения линейного элемента погрешности центрирования.
Использование предлагаемого устройства позволит с высокой степенью точности производить необходимые точные и высокоточные измерения в стесненных условиях, при коротких сторонах измеряемых углов в условиях плотной застройки, на стройплощадках, при создании геодезических сетей высоких классов точности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЭЛЕКТРОННЫЙ ЦЕНТРИР | 2010 |
|
RU2452920C1 |
| СПОСОБ ЦЕНТРИРОВАНИЯ ИЗМЕРИТЕЛЬНОГО ПРИБОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423664C2 |
| СПОСОБ ЦЕНТРИРОВАНИЯ ИЗМЕРИТЕЛЬНОГО ПРИБОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2008 |
|
RU2383862C1 |
| УСТРОЙСТВО ДЛЯ ВНЕЦЕНТРЕННЫХ ИЗМЕРЕНИЙ | 2011 |
|
RU2552393C2 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ЦЕНТРИР | 2009 |
|
RU2430332C2 |
| ПРИБОР ВЕРТИКАЛЬНОГО ПРОЕКТИРОВАНИЯ | 2011 |
|
RU2481556C1 |
| ПРИБОР ВЕРТИКАЛЬНОГО ПРОЕКТИРОВАНИЯ | 2015 |
|
RU2589239C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ПОДЗЕМНЫХ ГОРНЫХ ВЫРАБОТОК | 2017 |
|
RU2662468C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
| СПОСОБ СОГЛАСОВАНИЯ ОСЕЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ С ОСЬЮ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА И ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2436043C1 |








Изобретение относится к области приборостроения и технике измерений, преимущественно - геодезического приборостроения и геодезических измерений, и может быть использовано при установке измерительного прибора в рабочее положение. Техническим результатом является высокая степень точности проведения необходимых точных и высокоточных измерений в стесненных условиях. Способ установки измерительного прибора в рабочее положение в фиксированной точке местности включает предварительное и окончательное центрирование и горизонтирование измерительного прибора, выбор условной системы координат, измерение погрешности центрирования и редуцирование величин с учетом погрешности центрирования. Ориентируют коллимационную плоскость измерительного прибора по направлению линейного элемента погрешности центрирования, регистрируют значение направления и величину изображения линейного элемента погрешности центрирования и вычисляют фактическое значение линейного элемента погрешности. Выполняют измерения, предусмотренные назначением измерительного прибора, вычисляют координаты фиксированной и наблюдаемых точек и вычисляют определяемые величины, предусмотренные назначением прибора, с учетом величины погрешности центрирования. Устройство для установки измерительного прибора в рабочее положение в фиксированной точке местности содержит систему построения изображения, датчик измерения погрешности центрирования, электронную систему регистрации и обработки информации. Система построения изображения снабжена источником электромагнитного излучения и датчиком положения центра идентификационного пятна от источника электромагнитного излучения. Электронная система регистрации и обработки информации выполнена в виде совокупности функциональных блоков, связанных друг с другом в соответствии с установленным алгоритмом редуцирования измеренных величин, предусмотренных назначением измерительного прибора, с учетом погрешности центрирования, и установлена с возможностью приема сигналов от упомянутого датчика положения центра идентификационного пятна. 2 н. и 14 з.п. ф-лы, 10 ил.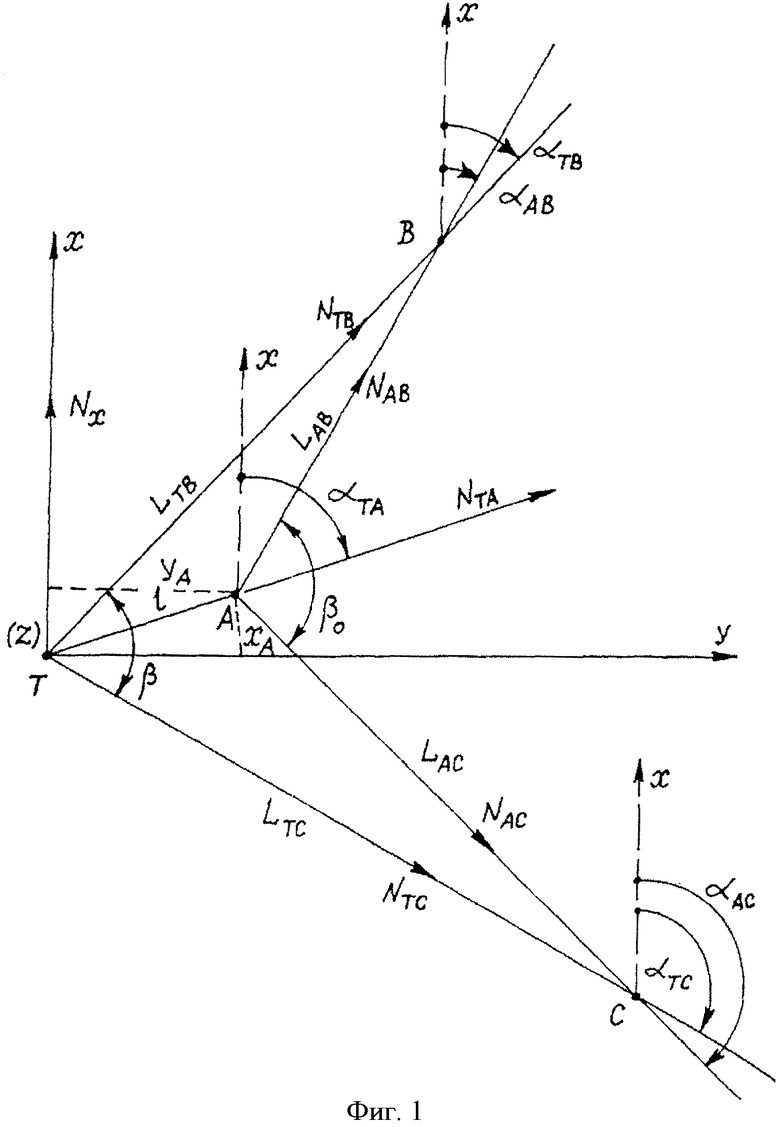
1. Способ установки измерительного прибора в рабочее положение в фиксированной точке местности, включающий предварительное центрирование и горизонтирование, а затем окончательное горизонтирование измерительного прибора, выбор условной системы координат, измерение высоты измерительного прибора, измерение погрешности центрирования, измерение в точке стояния величин, предусмотренных назначением прибора, и редуцирование величин с учетом погрешности центрирования, отличающийся тем, что в фиксированной точке местности размещают источник электромагнитного излучения, выполняют предварительное центрирование и горизонтирование измерительного прибора, его окончательное горизонтирование, после выполнения которого ориентируют коллимационную плоскость измерительного прибора по направлению линейного элемента погрешности центрирования, регистрируют значение направления и величину изображения линейного элемента погрешности центрирования и вычисляют фактическое значение линейного элемента погрешности центрирования с учетом изменения высоты измерительного прибора относительно ее паспортного значения, выполняют измерения, предусмотренные назначением измерительного прибора, вычисляют координаты фиксированной и наблюдаемых точек и вычисляют определяемые величины, предусмотренные назначением прибора, с учетом величины погрешности центрирования.
2. Способ по п.1, отличающийся тем, что измерение величин, предусмотренных назначением измерительного прибора, выполняют после окончательного горизонтирования на любом этапе работы в точке стояния до вычисления координат наблюдаемых точек.
3. Способ по п.1, отличающийся тем, что начало условной системы координат и одну из ее осей совмещают с вертикальной осью вращения измерительного прибора, а для другой из ее осей назначают любой из возможных отсчетов по горизонтальному кругу измерительного прибора, в том числе и отсчет, равный нулю.
4. Устройство для установки измерительного прибора в рабочее положение в фиксированной точке местности, содержащее систему построения изображения, датчик измерения погрешности центрирования, электронную систему регистрации и обработки информации, отличающееся тем, что система построения изображения снабжена в ее пространстве предметов источником электромагнитного излучения, а в ее пространстве изображений снабжена датчиком положения центра идентификационного пятна от источника электромагнитного излучения, при этом электронная система регистрации и обработки информации выполнена в виде совокупности функциональных блоков, связанных друг с другом в соответствии с установленным алгоритмом редуцирования измеренных величин, предусмотренных назначением измерительного прибора, с учетом погрешности центрирования, и установлена с возможностью приема сигналов от упомянутого датчика положения центра идентификационного пятна.
5. Устройство по п.4, отличающееся тем, что ось системы построения изображения совмещена с вертикальной осью вращения измерительного прибора.
6. Устройство по п.4, отличающееся тем, что датчик положения центра идентификационного пятна от источника электромагнитного излучения выполнен в виде двухкоординатной матрицы приемников электромагнитного излучения, одна из осей которой, перпендикулярная к поверхности размещения упомянутых приемников излучения, совмещена с вертикальной осью вращения измерительного прибора.
7. Устройство по п.4, отличающееся тем, что датчик положения центра идентификационного пятна от источника электромагнитного излучения выполнен в виде линейной матрицы приемников электромагнитного излучения, продольная ось которой перпендикулярна вертикальной оси вращения измерительного прибора и совмещена с положением коллимационной плоскости измерительного прибора либо образует с ней известный угол, при этом поворот упомянутой матрицы синхронизирован с поворотом коллимационной плоскости измерительного прибора.
8. Устройство по п.4, отличающееся тем, что электронная система регистрации и обработки информации снабжена функциональными блоками, в совокупность которых входят блок позиционирования и определения координат идентификационного пятна на датчике положения центра идентификационного пятна от источника электромагнитного излучения, блок вычисления линейного элемента погрешности центрирования, блок вычисления координат фиксированной точки местности и наблюдаемых точек, блок вычисления дирекционных углов, блок ввода высоты измерительного прибора, блок ввода измеренных расстояний, блок ввода измеренных направлений, блок вычисления определяемых расстояний, блок вычисления определяемых горизонтальных углов, блок вычисления определяемых направлений и запоминающее устройство, при этом упомянутый блок позиционирования и определения координат центра идентификационного пятна установлен с возможностью приема сигнала от датчика положения центра идентификационного пятна и передачи сигнала в блок вычисления линейного элемента погрешности центрирования, который установлен с возможностью приема сигнала из блока ввода высоты измерительного прибора, и передачи сигнала в блок вычисления координат фиксированной точки и наблюдаемых точек, который, в свою очередь, установлен с возможностью приема сигналов из блоков ввода измеренных расстояний и ввода измеренных направлений и передачи сигналов в блоки вычисления дирекционных углов и вычисления определяемых расстояний, упомянутый блок вычисления дирекционных углов установлен с возможностью передачи сигнала в блок вычисления определяемых горизонтальных углов, а запоминающее устройство установлено с возможностью приема сигналов из блоков вычисления определяемых расстояний, вычисления определяемых горизонтальных углов и вычисления дирекционных углов, при этом блок вычисления дирекционных углов и блок вычисления определяемых направлений совмещены.
9. Устройство по п.4, отличающееся тем, что электронная система регистрации и обработки информации снабжена функциональными блоками, в совокупность которых входят блок позиционирования и определения координат идентификационного пятна на датчике положения центра идентификационного пятна, блок вычисления линейного элемента погрешности центрирования, блок вычисления координат фиксированной точки местности и наблюдаемых точек, блок вычисления дирекционных углов, блок ввода высоты измерительного прибора, блок ввода измеренных расстояний, блок ввода измеренных направлений, блок вычисления определяемых расстояний, блок вычисления определяемых горизонтальных углов, блок вычисления определяемых направлений и запоминающее устройство, при этом упомянутый блок позиционирования и определения координат центра идентификационного пятна установлен с возможностью приема сигналов от датчика положения центра идентификационного пятна и передачи сигнала в блок вычисления линейного элемента погрешности центрирования, который установлен с возможностью приема сигнала из блока ввода высоты измерительного прибора, и передачи сигнала в блок вычисления координат фиксированной точки и наблюдаемых точек, который, в свою очередь, установлен с возможностью приема сигналов из блоков ввода измеренных расстояний и ввода измеренных направлений и передачи сигналов в блоки вычисления дирекционных углов и вычисления определяемых расстояний, упомянутый блок вычисления дирекционных углов установлен с возможностью передачи сигнала в блок вычисления определяемых горизонтальных углов и передачи сигнала в блок вычисления определяемых направлений, который установлен с возможностью приема сигнала из блока ввода измеренных направлений, а запоминающее устройство установлено с возможностью приема сигналов из блоков вычисления определяемых расстояний, вычисления определяемых горизонтальных углов и вычисления определяемых направлений.
10. Устройство по п.4, отличающееся тем, что электронная система регистрации и обработки информации снабжена функциональными блоками, в совокупность которых входят блок позиционирования и определения координат идентификационного пятна на датчике положения центра идентификационного пятна от источника электромагнитного излучения, блок вычисления линейного элемента погрешности центрирования, блок вычисления координат фиксированной точки местности и наблюдаемых точек, блок вычисления дирекционных углов, блок ввода высоты измерительного прибора, блок ввода измеренных расстояний, блок ввода измеренных направлений, блок вычисления определяемых расстояний, блок вычисления определяемых горизонтальных углов, блок вычисления определяемых направлений и запоминающее устройство, при этом упомянутый блок позиционирования и определения координат центра идентификационного пятна установлен с возможностью приема сигналов от датчика положения центра идентификационного пятна и передачи сигнала в блок вычисления линейного элемента погрешности центрирования, который установлен с возможностью приема сигнала из блока ввода высоты измерительного прибора, и передачи сигнала в блок вычисления координат фиксированной точки и наблюдаемых точек, который, в свою очередь, установлен с возможностью приема сигналов из блоков ввода измеренных расстояний и ввода измеренных направлений и передачи сигналов в блоки вычисления дирекционных углов и вычисления определяемых расстояний, упомянутый блок вычисления дирекционных углов установлен с возможностью передачи сигнала в блок вычисления определяемых направлений, который установлен с возможностью приема сигнала из блока ввода измеренных направлений и передачи сигнала в блок вычисления определяемых горизонтальных углов, а запоминающее устройство установлено с возможностью приема сигналов из блоков вычисления определяемых расстояний, вычисления определяемых горизонтальных углов и вычисления определяемых направлений.
11. Устройство по п.4, отличающееся тем, что источник электромагнитного излучения выполнен переносным с возможностью временного его размещения в фиксированной точке местности и оборудован системой доставки, в частности штангой, например, телескопического типа.
12. Устройство по п.4, отличающееся тем, что источник электромагнитного излучения снабжен отражателем диффузионного типа, выполненным с возможностью временного его размещения в фиксированной точке местности и оборудованным системой доставки, в частности штангой, например, телескопического типа.
13. Устройство по п.4, отличающееся тем, что источник электромагнитного излучения размещен непосредственно на измерительном приборе или на вспомогательном оборудовании, например на штативе измерительного прибора.
14. Устройство по п.4, отличающееся тем, что источник электромагнитного излучения снабжен модулятором электромагнитного излучения и/или фильтром электромагнитного излучения.
15. Устройство по п.4, отличающееся тем, что система построения изображения и датчик положения центра идентификационного пятна от источника электромагнитного излучения установлены с возможностью взаимного перемещения относительно друг друга с учетом изменения высоты измерительного прибора относительно ее паспортного значения.
16. Устройство по п.4, отличающееся тем, что оно конструктивно полностью или частично совмещено с измерительным прибором.
| СПОСОБ ПОВЕРКИ ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА | 0 |
|
SU243847A1 |
| Коаксиальная подвеска оптических элементов, стабилизирующих положение визирной оси в измерительных приборах | 1972 |
|
SU436977A1 |
| Тахеометр | 1988 |
|
SU1597553A1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2005 |
|
RU2299402C1 |
| Способ изготовления многослойных деталей из полиимидофторопластовых пленок | 1988 |
|
SU1600191A1 |

