Изобретение относится к машиностроению, в частности к промышленным роботам и манипуляторам, и может быть использовано в различных отраслях народного хозяйства.
Наиболее близким аналогом изобретения по технической сущности является робот, содержащий верхнее и нижнее основания, руку, захват и привод руки (RU 2090353 C1, B25J 18/00, опубликован 20.09.1997).
Недостатком известного робота является отсутствие автоматического управления движениями руки с захватом, что снижает точность позиционирования.
Задача изобретения - автоматизация работы манипулятора и обеспечение точности позиционирования.
Поставленная задача решается за счет того, что в поршневом двигателе, содержащем полый цилиндрический корпус и поршень, размещенный в корпусе и кинематически связанный с валом отбора мощности, корпус снабжен верхней и нижней крышками, по оси корпуса установлен направляющий неподвижный шток, на котором соосно ему расположен поршень, выполненный в виде пакета дисков из материала, обладающего эффектом памяти формы, диски в пакете расположены попарно с возможностью прогиба дисков в паре в противоположных направлениях с образованием полости между ними и у всех дисков пакета центральные кольцевые участки, охватывающие направляющий неподвижный шток, выполнены из материала с низкой теплопроводностью, не обладающего эффектом памяти формы, кинематическая связь поршня с валом выполнена в виде подвижного полого штока, прикрепленного к нижнему диску нижней пары пакета дисков, связанного кривошипно-шатунным механизмом с валом, коаксиального направляющему неподвижному штоку, охватывающего направляющий неподвижный шток с возможностью совершения вдоль него возвратно-поступательных перемещений при изменении дисками своей формы и имеющего буртик, расположенный с возможностью взаимодействия с закрепленным в нижней части корпуса или на нижней крышке корпуса ограничителем перемещения подвижного штока, в каждом диске выполнена пара диаметрально расположенных сквозных отверстий для прохода теплоносителей, причем каждая пара отверстий в каждом следующем диске пакета смещена на 90° по отношению к паре отверстий в предыдущем диске, в нижней крышке выполнено сквозное отверстие для подачи холодного теплоносителя, в верхней крышке выполнены сквозные отверстия для подачи горячего теплоносителя и для выпуска холодного теплоносителя, в нижней части корпуса выполнено сквозное отверстие для выпуска горячего теплоносителя, в верхней крышке со стороны поршня выполнена кольцевая проточка, сообщенная с отверстиями в этой крышке для подачи горячего теплоносителя и для выпуска холодного теплоносителя, а также сообщенная с отверстиями в дисках и с образующимися полостями между ними, в верхней и нижней крышках установлены датчики температуры, в отверстиях верхней и нижней крышек и в отверстии корпуса установлены электроуправляемые клапаны, причем датчики и клапаны связаны с системой управления, с которой также связаны теплообменники и насосы системы циркуляции теплоносителей.
Материал, обладающий эффектом памяти формы из которого выполнены диски, представляет собой сплав со следующим содержанием компонентов в массовых долях, %: титан - 15-20, никель - 15-20, медь - 8-15, марганец - 4,0-4,5, цирконий - 0,9-1,2, иттрий - 0,2-0,3, углерод - 0, 5-1,0, железо - остальное.
Указанное сочетание компонентов обусловлено следующими причинами. Марганец, никель и медь усиливают термоупругие мартенситные превращения и коррозионную стойкость стали; углерод выбран в качестве легирующего компонента, потому что он улучшает эффект памяти формы; введение циркония способствует увеличению гистерезиса между прямым и обратным мартенситными превращениями; добавление иттрия способствует пластификации матрицы, которая может охрупчиваться при введении в сплав циркония; концентрационный интервал содержания титана обеспечивает мартенситное превращение, технологичность и улучшение проявления эффекта памяти формы.
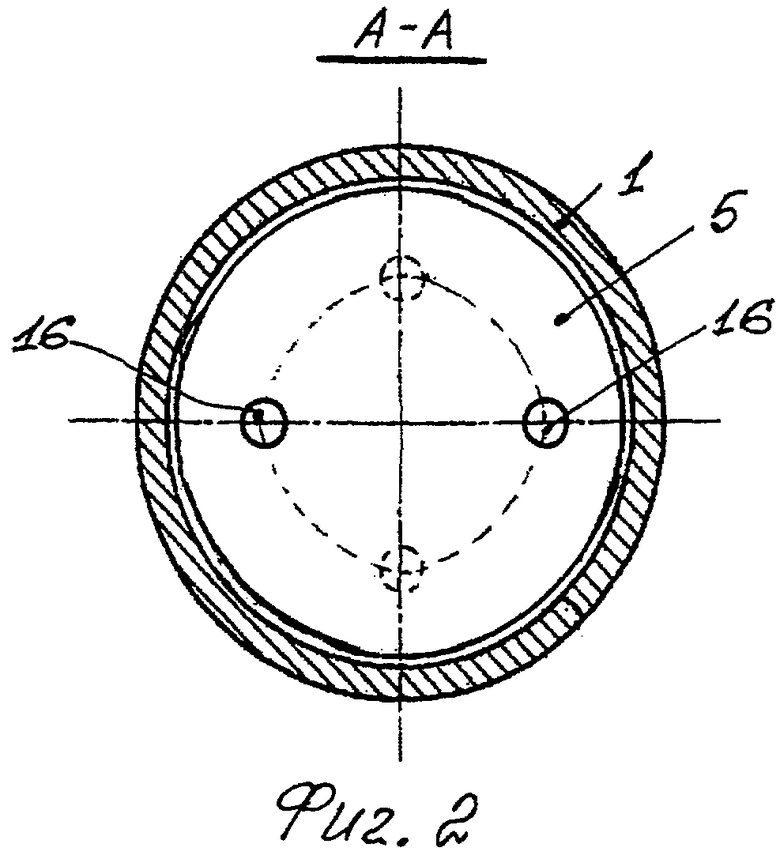
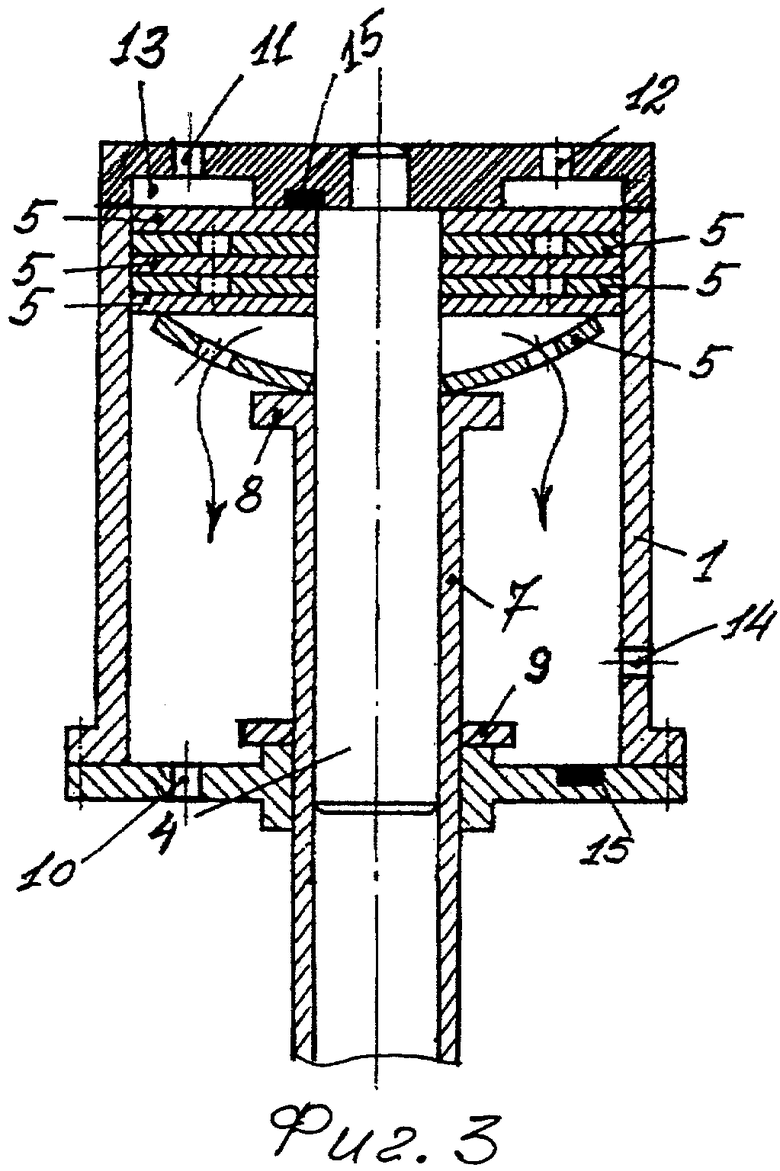
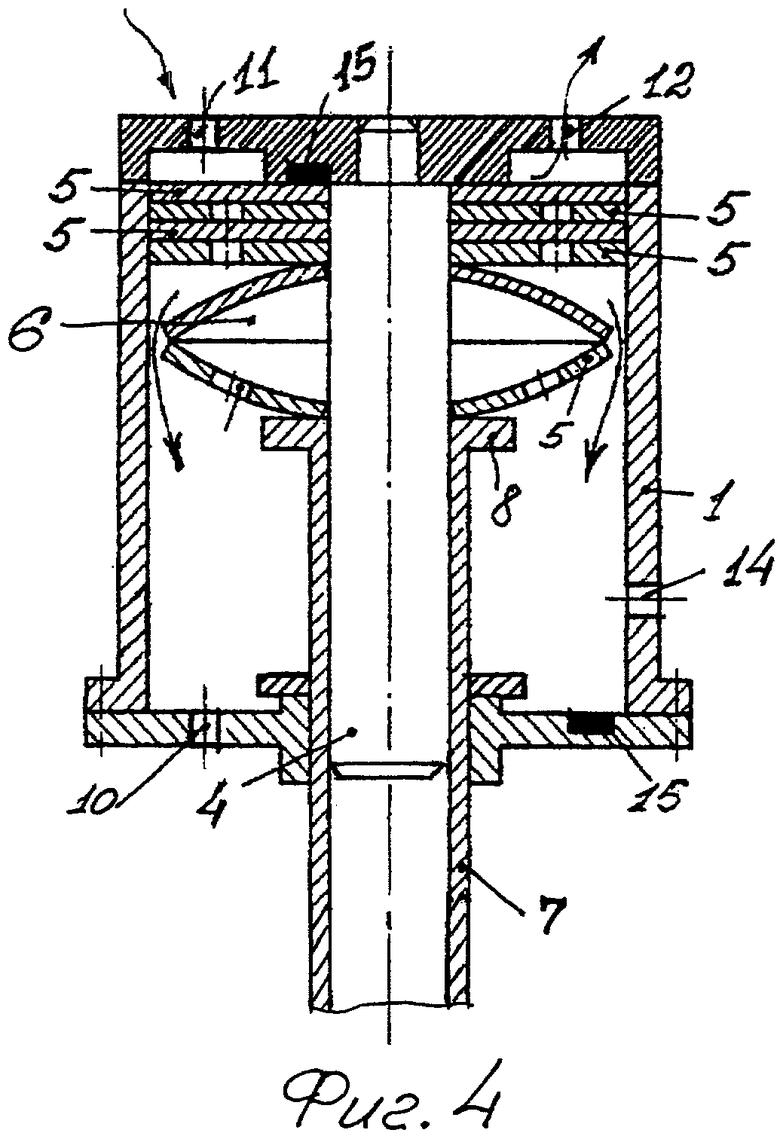
Изобретение поясняется чертежами, где на фиг.1 схематично изображен описываемый робот; на фиг.2 - разрез А-А на фиг.1; на фиг.3 - робот в момент срабатывания одного из дисков; на фиг.4 - робот в момент срабатывания пары дисков.
Робот содержит полый цилиндрический корпус 1, размещенный верхним и нижним основаниями 2 и 3; в корпусе 1 по оси установлен направляющий неподвижный опорный элемент 4, выполненный, например, в виде стержня. Рука выполнена в виде соосного корпусу 1 пакета дисков 5 из материала, обладающего эффектом памяти формы; диски 5 в пакете расположены попарно с возможностью прогиба дисков 5 в паре в противоположных направлениях с образованием полости 6 между ними (фиг.4). У всех дисков 5 пакета имеются центральные кольцевые участки (условно не показаны), охватывающие направляющий неподвижный опорный элемент 4 и выполненные из материала с низкой теплопроводностью, не обладающего эффектом памяти формы. Наличие указанных участков, практически не подверженных деформациям при изменении температуры, обеспечивает беспрепятственное скольжение дисков 5 вдоль опорного элемента 4.
Захват 7 выполнен в виде подвижного полого цилиндрического элемента, прикрепленного к нижнему диску нижней пары пакета дисков 5, коаксиального направляющему неподвижному опорному элементу 4 и охватывающего элемент 4 с возможностью совершения вдоль него возвратно-поступательных перемещений при изменении дисками 5 своей формы. Захват 7 имеет буртик 8, расположенный с возможностью взаимодействия с закрепленным в нижней части корпуса 1 или на его нижнем основании 3 ограничителем 9 перемещения захвата 7.
В нижнем основании 3 выполнено сквозное отверстие 10 для подачи холодного теплоносителя, а в верхнем основании 2 выполнены сквозные отверстия 11 и 12 для подачи горячего теплоносителя и для выпуска холодного теплоносителя соответственно. В верхнем основании 2 со стороны пакета дисков 5 выполнена кольцевая проточка 13, сообщенная с отверстиями 11 и 12 в этом же основании для подачи горячего теплоносителя и для выпуска холодного теплоносителя, а в нижней части корпуса 1 выполнено сквозное отверстие 14 для выпуска горячего теплоносителя.
В верхнем и в нижнем основаниях 2 и 3 и/или в верхней и в нижней частях корпуса 1 установлены датчики 15 температуры; в отверстиях 10, 11 и 12 верхнего и нижнего оснований 2 и 3 и в отверстиях 10 и 14 корпуса 1 установлены электроуправляемые клапаны (условно не показаны). Датчики и клапаны связаны с системой управления, с которой также связаны теплообменники и насосы системы циркуляции теплоносителей (условно не показаны).
В каждом диске 5 выполнены сквозные отверстия 16 для прохода теплоносителей; причем отверстия 16 в каждом следующем диске 5 пакета смещены по отношению к отверстиям 16 в предыдущем диске 5, что способствует эффективному нагреву или охлаждению дисков (фиг.2). Проточка 13 сообщена с отверстиями 16 в дисках 5 и с полостями 6 между ними. В зависимости от условий изготовления и эксплуатации отверстие 11 для подачи горячего теплоносителя и отверстие 12 для выпуска холодного теплоносителя могут быть выполнены не в верхнем основании 2, а в верхней части корпуса 1, а отверстие 10 для подачи холодного теплоносителя может быть выполнено не в нижнем основании 3, а в нижней части корпуса 1. В этом случае надобность в проточке 13 отпадает.
Работа робота осуществляется следующим образом.
По сигналу системы управления электроуправляемый клапан открывает отверстие 11, и горячий теплоноситель поступает в кольцевую проточку 13, отверстия 16 и зазоры между дисками 5 руки и корпусом 1 и нагревает диски 5. Вследствие проявления эффекта памяти формы диски 5 руки «вспоминают» свою форму и, изгибаясь в противоположных направлениях, образуют полости 6, которые заполняются горячим теплоносителем. При своем прогибе диски 5 перемещают захват 7 вниз до взаимодействия его буртика 8 с ограничителем 9 перемещения. При этом температура в полости корпуса 1 повышается, срабатывает датчик 15 температуры, и по сигналам системы управления электроуправляемые клапаны закрывают отверстие 11 в верхнем основании 2 и открывают отверстие 14 в нижней части корпуса 1, через которое горячий теплоноситель отсасывается в систему циркуляции теплоносителей.
Затем по сигналу системы управления электроуправляемый клапан открывает отверстие 10, и холодный теплоноситель поступает в полость корпуса 1 и через зазоры и отверстия 16 поступает в полости 6 между дисками 5, охлаждая их. Сочетание компонентов в сплаве, из которого выполнены диски 5 руки, обеспечивает деформацию полученной мартенситной структуры полностью обратимой. При охлаждении дисков 5 происходит их обратная деформация, в результате которой диски 5 выпрямляются, полости 6 между ними захлопываются, а прикрепленный к нижнему диску 5 руки захват 7 перемещается вверх (фиг.1). При этом температура в полости корпуса 1 понижается, срабатывает датчик 15 температуры, и по сигналам системы управления электроуправляемые клапаны закрывают отверстие 10 в нижнем основании 3 и открывают отверстие 12 в верхнем основании 2, через которое холодный теплоноситель отсасывается в систему циркуляции теплоносителей.
Далее цикл повторяется.
Для увеличения плавности движения диски 5 руки в каждой паре могут быть «настроены» на разные температуры, при которых происходят их деформации. Например, таким образом, чтобы, не преодолевая сопротивление остальных дисков пакета, первым под влиянием горячего теплоносителя, поступающего через отверстия и зазоры, изгибался бы нижний диск нижней пары пакета дисков 5, потом следующий за ним и т.д. (фиг.3 и фиг.4). При охлаждении диски 5 деформируются снизу вверх в обратном порядке, выдавливая из полостей 6 холодный теплоноситель в проточку 13 и далее в отверстие 12.
Периодические прогибы и распрямления дисков 5 обеспечивают возвратно-поступательные перемещения руки с захватом 7 и его точное позиционирование в автоматическом режиме.
В качестве теплоносителя могут быть использованы как жидкости (например, вода), так и газы (например, воздух). Причем замкнутая система циркуляции позволяет использовать в нагретом или охлажденном состоянии один и тот же теплоноситель, периодически подаваемый в полость корпуса.
Изобретение обеспечивает создание надежного робота, обеспечивающего автоматический режим и удобного в эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 2010 |
|
RU2424106C1 |
| ПОРШНЕВОЙ ДВИГАТЕЛЬ | 2008 |
|
RU2352812C1 |
| ПОРШНЕВОЙ ДВИГАТЕЛЬ | 2008 |
|
RU2352786C1 |
| ЯДЕРНЫЙ РЕАКТОР ИНТЕГРАЛЬНОГО ТИПА С ЖИДКОМЕТАЛЛИЧЕСКИМ ТЕПЛОНОСИТЕЛЕМ | 2022 |
|
RU2798478C1 |
| ЯДЕРНЫЙ РЕАКТОР С ЖИДКОМЕТАЛЛИЧЕСКИМ ТЕПЛОНОСИТЕЛЕМ | 2021 |
|
RU2756231C1 |
| ОТОПИТЕЛЬНЫЙ КОТЕЛ | 2013 |
|
RU2546370C1 |
| Гидравлический многоэтажный пресс с механизмом подъема и способ прессования с гидравлической схемой его реализации | 2017 |
|
RU2681591C2 |
| Устройство прокалывания капсулы капсульной машины для приготовления безалкогольных напитков | 2018 |
|
RU2672849C1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| АВТОМОБИЛЬНЫЙ ТЕРМОСТАТ С ЭЛЕКТРОННЫМ УПРАВЛЕНИЕМ | 2008 |
|
RU2375592C1 |
Изобретение относится к машиностроению, в частности к промышленным роботам или манипуляторам, и может быть использовано в различных отраслях народного хозяйства. Робот содержит корпус с верхним и нижним основаниями, руку с захватом, систему циркуляции горячего и холодного теплоносителей, включающую теплообменники, электроуправляемые клапаны и насосы, и систему управления, связанную с системой циркуляции и включающую датчики температуры. Рука выполнена в виде соосного корпусу пакета дисков из материала, обладающего эффектом памяти формы. Диски в пакете расположены попарно с возможностью прогиба дисков в паре в противоположных направлениях. Захват выполнен в виде полого цилиндрического элемента, прикрепленного к нижнему диску нижней пары пакета дисков, коаксиального направляющему неподвижному опорному элементу и охватывающего этот элемент с возможностью совершения вдоль него возвратно-поступательных перемещений при изменении дисками своей формы. Изобретение обеспечивает создание надежного автоматического удобного в эксплуатации робота. 1 з.п. ф-лы, 4 ил.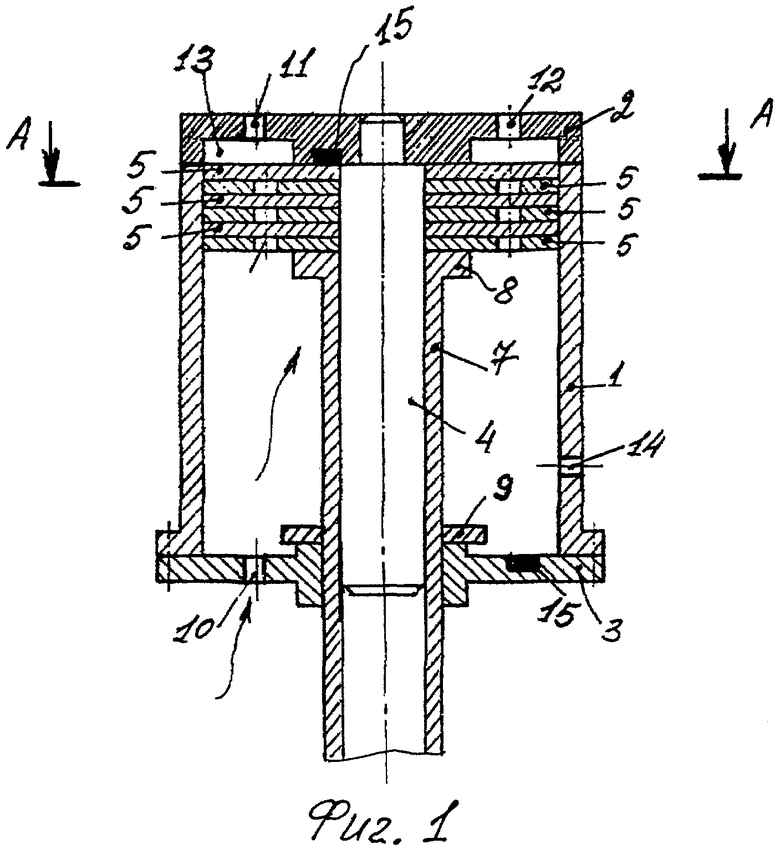
1. Робот, содержащий верхнее и нижнее основания, руку и захват, отличающийся тем, что он снабжен размещенным между основаниями полым цилиндрическим корпусом, по оси которого установлен направляющий неподвижный опорный элемент, рука выполнена в виде соосного упомянутому корпусу пакета дисков из материала, обладающего эффектом памяти формы, при этом диски в пакете расположены попарно с возможностью прогиба дисков в паре в противоположных направлениях с образованием полости между ними, в каждом диске выполнены сквозные отверстия для прохода теплоносителей, причем отверстия в каждом следующем диске пакета смещены по отношению к отверстиям в предыдущем диске, и у всех дисков пакета центральные кольцевые участки, охватывающие направляющий неподвижный опорный элемент, выполнены из материала с низкой теплопроводностью, не обладающего эффектом памяти формы, а захват выполнен в виде имеющего буртик подвижного полого цилиндрического элемента, прикрепленного к нижнему диску нижней пары пакета дисков, коаксиального направляющему неподвижному опорному элементу и охватывающего этот элемент с возможностью совершения вдоль него возвратно-поступательных перемещений при изменении дисками своей формы, причем буртик расположен с возможностью взаимодействия с закрепленным в нижней части упомянутого корпуса или на его нижнем основании ограничителем перемещения, при этом в нижнем основании выполнено сквозное отверстие для подачи холодного теплоносителя, а в верхнем основании выполнены сквозные отверстия для подачи горячего теплоносителя и для выпуска холодного теплоносителя соответственно, в верхнем основании со стороны пакета дисков выполнена кольцевая проточка, сообщенная с отверстиями в дисках, полостями между ними и с отверстиями для подачи горячего теплоносителя и для выпуска холодного теплоносителя, в нижней части упомянутого корпуса выполнено сквозное отверстие для выпуска горячего теплоносителя, при этом в верхнем и в нижнем основаниях и/или в верхней и в нижней частях упомянутого корпуса установлены датчики температуры, а в отверстиях верхнего и нижнего оснований и в отверстиях упомянутого корпуса установлены электроуправляемые клапаны, причем датчики и клапаны связаны с системой управления, с которой также связаны теплообменники и насосы системы циркуляции теплоносителей.
2. Робот по п.1, отличающийся тем, что материал, обладающий эффектом памяти формы, из которого выполнены диски, представляет собой сплав со следующим содержанием компонентов, мас.%:
| МАНИПУЛЯТОР | 1995 |
|
RU2090353C1 |
| ПРИВОД | 1990 |
|
RU2008522C1 |
| RU 2007139250 А, 27.04.2009 | |||
| Манипулятор | 1984 |
|
SU1240574A1 |
| Рука промышленного робота | 1983 |
|
SU1225781A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

