Изобретение относится к машиностроению, в частности к промышленным роботам и манипуляторам, и может быть использовано в различных отраслях народного хозяйства.
Наиболее близким аналогом изобретения по технической сущности является манипулятор, содержащий верхнее и нижнее основания, руку, выполненную в виде секций и имеющую захват, и привод руки (RU 2090353 C1, B25J 18/00, опубл. 20.09.1997).
Недостатком известного манипулятора является отсутствие автоматического управления движениями руки с захватом, что снижает точность позиционирования.
Задача изобретения - автоматизация работы манипулятора и обеспечение точности позиционирования.
Поставленная задача решается за счет того, что манипулятор, содержащий верхнее и нижнее основания, руку, выполненную в виде секций и имеющую захват, и привод руки, снабжен полым цилиндрическим корпусом, размещенным между основаниями, секции руки выполнены в виде расположенных в корпусе верхнего и нижнего упругих элементов с опорным элементом между ними; при этом верхний упругий элемент прикреплен одним концом к верхнему основанию, а другим концом - к опорному элементу, нижний упругий элемент прикреплен одним концом к нижнему основанию, а другим концом - к опорному элементу, и оба упругих элемента выполнены в виде перфорированных сильфонов или цилиндрических пружин из материала, обладающего эффектом памяти формы; привод руки снабжен системой циркуляции горячего и холодного теплоносителей, включающей теплообменники, электроуправляемые клапаны и насосы для подачи горячего и холодного теплоносителей в полость корпуса, и системой управления, связанной с системой циркуляции и включающей датчики верхнего и нижнего положений опорного элемента; захват выполнен в виде стержня, прикрепленного к опорному элементу со стороны нижнего упругого элемента и расположенного внутри последнего, в верхней и в нижней частях корпуса или в верхнем и в нижнем основаниях выполнены отверстия для впуска и выпуска горячего и холодного теплоносителей; причем отверстие для впуска горячего теплоносителя и отверстие для впуска холодного теплоносителя сообщены посредством одноименных каналов с установленными в них электроуправляемыми клапанами и общим трубопроводом подключены к системе циркуляции горячего и холодного теплоносителей с возможностью поочередной подачи в один из каналов соответствующего теплоносителя; датчики верхнего и нижнего положений опорного элемента установлены в углублениях внутренней поверхности корпуса и выполнены в виде оптронов, включающих связанные оптическим каналом источники и приемники излучения в виде светодиодов и фотодиодов соответственно; прикрепленные к опорному элементу концы упругих элементов выполнены из материала с низкой теплопроводностью, не обладающего эффектом памяти формы.
Материал, обладающий эффектом памяти формы, из которого выполнены упругие элементы, представляет собой сплав со следующим содержанием компонентов в массовых долях, %: титан 15-20, никель 15-20, медь 8-15, марганец 4,0-4,5, цирконий 0,9-1,2, иттрий 0,2-0,3, углерод 0, 5-1,0, железо - остальное.
Указанное сочетание компонентов обусловлено следующими причинами.
Марганец, никель и медь усиливают термоупругие мартенситные превращения и коррозионную стойкость стали; углерод выбран в качестве легирующего компонента, потому что он улучшает эффект памяти формы; введение циркония способствует увеличению гистерезиса между прямым и обратным мартенситными превращениями; добавление иттрия способствует пластификации матрицы, которая может охрупчиваться при введении в сплав циркония; концентрационный интервал содержания титана обеспечивает мартенситное превращение, технологичность и улучшение проявления эффекта памяти формы.
Изобретение поясняется чертежом, схематично изображающим описываемый манипулятор.
Манипулятор содержит верхнее 1 и нижнее 2 основания, руку, выполненную в виде секций и имеющую захват 3, и привод руки. Манипулятор снабжен полым цилиндрическим корпусом 4, размещенным между основаниями 1 и 2, секции руки выполнены в виде расположенных в корпусе 4 верхнего 5 и нижнего 6 упругих элементов с опорным элементом 7 между ними. При этом верхний упругий элемент 5 прикреплен одним концом к верхнему основанию 1, а другим концом - к опорному элементу 7; нижний упругий элемент 6 прикреплен одним концом к нижнему основанию 2, а другим концом - к опорному элементу 7, причем оба упругих элемента 5 и 6 выполнены в виде перфорированных сильфонов или цилиндрических пружин из материала, обладающего эффектом памяти формы. Привод руки снабжен системой циркуляции горячего и холодного теплоносителей, включающей теплообменники, электроуправляемые клапаны и насосы для подачи горячего и холодного теплоносителей в полость корпуса 4, и системой управления, связанной с системой циркуляции и включающей датчики верхнего и нижнего положений опорного элемента 7. Захват 3 выполнен в виде стержня, прикрепленного к опорному элементу 7 со стороны нижнего упругого элемента 6 и расположенного внутри последнего. В верхней и в нижней частях корпуса 4 (или в верхнем и в нижнем основаниях 1 и 2) выполнены отверстия для впуска 10 и выпуска 17 горячего теплоносителя и для впуска 11 и выпуска 18 холодного теплоносителя. Отверстие 10 для впуска горячего теплоносителя и отверстие 11 для впуска холодного теплоносителя сообщены посредством одноименных каналов 12 и 13 соответственно с установленными в них электроуправляемыми клапанами 14 и 15 и общим трубопроводом 16 подключены к системе циркуляции горячего и холодного теплоносителей с возможностью поочередной подачи в один из каналов 12 или 13 соответствующего теплоносителя. Датчики верхнего 8 и нижнего 9 положений опорного элемента 7 установлены в углублениях внутренней поверхности корпуса 4 и выполнены в виде оптронов, включающих связанные оптическим каналом источники и приемники излучения в виде светодиодов и фотодиодов соответственно. Установка датчиков 8 и 9 в углублениях обеспечивает беспрепятственное скольжение опорного элемента 7 по внутренней поверхности корпуса 4.
Прикрепленные к опорному элементу 7 концы упругих элементов 5 и 6 выполнены из материала с низкой теплопроводностью, не обладающего эффектом памяти формы. Наличие указанных участков, практически не подверженных деформациям при изменении температуры, предотвращает деформацию опорного элемента 7 и обеспечивает его беспрепятственное скольжение по внутренней поверхности корпуса 1.
Для усиления эффекта упругие элементы 5 и 6 могут быть «настроены» на разные температуры, при которых происходят их деформации. Например, элемент 5 распрямляется при нагревании и сжимается при охлаждении, а элемент 6, наоборот, сжимается при нагревании и распрямляется при охлаждении.
Манипулятор работает следующим образом.
По сигналам системы управления горячий теплоноситель поступает в трубопровод 16 и далее в канал 12. Когда электроуправляемый клапан 14 открывает отверстие 10, горячий теплоноситель поступает в полость корпуса 4, свободно перетекая через зазоры и перфорацию сильфона или витки пружины упругих элементов 5 и 6. Вследствие проявления эффекта памяти формы упругие элементы 5 и 6 «вспоминают» свою форму, в результате чего элемент 5 распрямляется, а элемент 6 сжимается, опорный элемент 7 с захватом 3 перемещается в нижнее положение. При этом оптический канал, связывающий источник и приемник излучения датчика 8 верхнего положения, при смещении опорного элемента 7 открывается, а оптический канал, связывающий источник и приемник излучения датчика 9 нижнего положения, перекрывается опорным элементом 7.
Принцип работы оптрона заключается в преобразовании электрических сигналов системы управления в свет, его передаче по оптическим каналам обратно в систему управления и в последующем преобразовании обратно в электрические сигналы системы управления, обеспечивающей бесконтактное управление подачей теплоносителей насосами, подогрев или охлаждение теплоносителей посредством теплообменников и включение или выключение электроуправляемых клапанов системы циркуляции.
По сигналам системы управления электроуправляемые клапаны закрывают отверстие 10 для впуска горячего теплоносителя и открывают отверстие 17 для выпуска горячего теплоносителя, через которое теплоноситель отсасывается в систему циркуляции.
Затем по сигналам системы управления холодный теплоноситель поступает в трубопровод 16 и далее в канал 13. Когда электроуправляемый клапан 15 открывает отверстие 11, холодный теплоноситель поступает в полость корпуса 4, свободно перетекая через зазоры и перфорацию сильфона или витки пружины упругих элементов 5 и 6. Вследствие проявления эффекта памяти формы упругие элементы 5 и 6 «вспоминают» свою форму, в результате чего элемент 5 сжимается, а элемент 6 распрямляется, опорный элемент 7 с захватом 3 перемещается в верхнее положение.
При этом оптический канал, связывающий источник и приемник излучения датчика 9 нижнего положения, при смещении опорного элемента 7 открывается, а оптический канал, связывающий источник и приемник излучения датчика 8 верхнего положения, перекрывается опорным элементом 7.
Далее цикл повторяется.
Возвратно-поступательные перемещения упругих элементов 5 и 6 с опорным элементом 7 между ними обеспечивают точное позиционирование захвата 3 в автоматическом режиме.
В качестве теплоносителя могут быть использованы как жидкости (например, вода), так и газы (например, воздух). Причем замкнутая система циркуляции позволяет использовать в нагретом или охлажденном состоянии один и тот же теплоноситель, периодически подаваемый в полость корпуса.
Изобретение обеспечивает создание надежного манипулятора, обеспечивающего автоматический режим и удобного в эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТ | 2010 |
|
RU2424107C1 |
| ПОРШНЕВОЙ ДВИГАТЕЛЬ | 2008 |
|
RU2352786C1 |
| ПОРШНЕВОЙ ДВИГАТЕЛЬ | 2008 |
|
RU2352812C1 |
| ЯДЕРНЫЙ РЕАКТОР ИНТЕГРАЛЬНОГО ТИПА С ЖИДКОМЕТАЛЛИЧЕСКИМ ТЕПЛОНОСИТЕЛЕМ | 2022 |
|
RU2798478C1 |
| ПРИВОД | 1990 |
|
RU2008522C1 |
| СПОСОБ РАБОТЫ ОТОПИТЕЛЬНОГО КОТЛА В СИСТЕМЕ ОТОПЛЕНИЯ | 2022 |
|
RU2818407C2 |
| Опорный элемент для выполнения кладки формованных материалов и способ футеровки с использованием опорного элемента | 2022 |
|
RU2794071C1 |
| МОБИЛЬНЫЙ РОБОТ | 2012 |
|
RU2487007C1 |
| ЯДЕРНЫЙ РЕАКТОР С ЖИДКОМЕТАЛЛИЧЕСКИМ ТЕПЛОНОСИТЕЛЕМ | 2021 |
|
RU2756231C1 |
| Устройство для поштучной выдачи листов из стопы | 1988 |
|
SU1595770A1 |
Изобретение относится к машиностроению, в частности к промышленным роботам или манипуляторам, и может быть использовано в различных отраслях народного хозяйства. Манипулятор содержит корпус с верхним и нижним основаниями, руку с захватом и привод, снабженный системой циркуляции горячего и холодного теплоносителей, включающей теплообменники, электроуправляемые клапаны и насосы для подачи горячего и холодного теплоносителей в полость корпуса, и системой управления, связанной с системой циркуляции и включающей датчики верхнего и нижнего положений опорного элемента. Секции руки выполнены в виде упругих элементов с опорным элементом между ними, к которому прикреплен захват. Причем оба упругих элемента выполнены в виде перфорированных сильфонов или цилиндрических пружин из материала, обладающего эффектом памяти формы. Изобретение обеспечивает создание надежного манипулятора, удобного в эксплуатации, обеспечивающего автоматический режим и точное позиционирование. 1 з.п. ф-лы, 1 ил.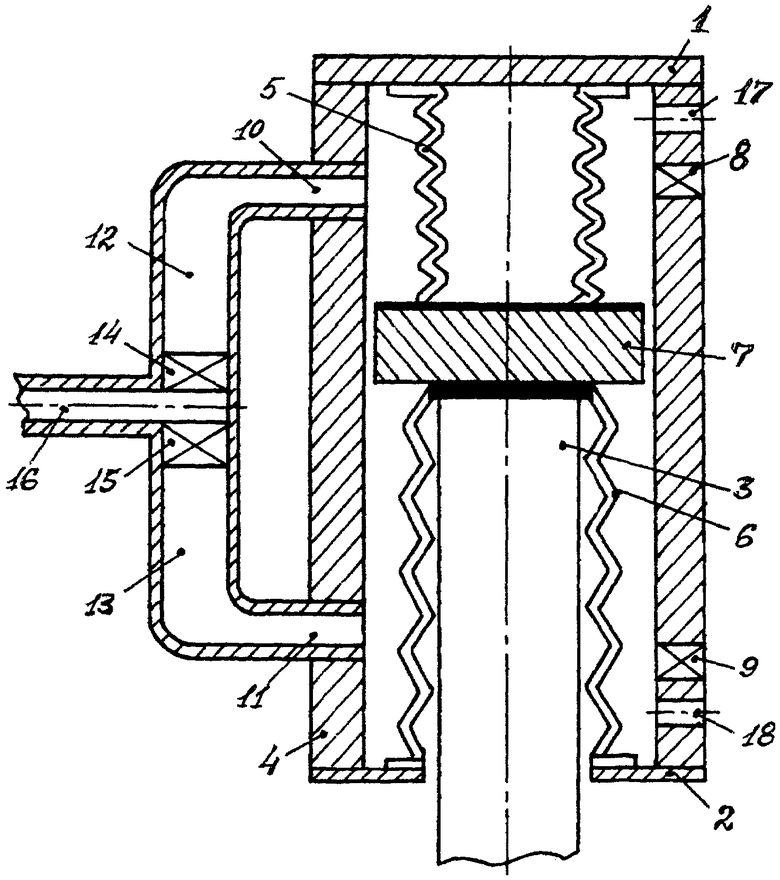
1. Манипулятор, содержащий верхнее и нижнее основания, руку, выполненную в виде секций и имеющую захват, и привод руки, отличающийся тем, что он снабжен полым цилиндрическим корпусом, размещенным между основаниями, секции руки выполнены в виде расположенных в упомянутом корпусе верхнего и нижнего упругих элементов с опорным элементом между ними, при этом верхний упругий элемент прикреплен одним концом к верхнему основанию, а другим концом - к опорному элементу, нижний упругий элемент прикреплен одним концом к нижнему основанию, а другим концом - к опорному элементу, причем оба упругих элемента выполнены в виде перфорированных сильфонов или цилиндрических пружин из материала, обладающего эффектом памяти формы, привод руки снабжен системой циркуляции горячего и холодного теплоносителей, включающей теплообменники, электроуправляемые клапаны и насосы для подачи горячего и холодного теплоносителей в полость упомянутого корпуса, и системой управления, связанной с системой циркуляции и включающей датчики верхнего и нижнего положений опорного элемента, захват выполнен в виде стержня, прикрепленного к опорному элементу со стороны нижнего упругого элемента и расположенного внутри последнего, в верхней и в нижней частях упомянутого корпуса или в верхнем и в нижнем основаниях выполнены отверстия для впуска и выпуска горячего и холодного теплоносителей, причем отверстие для впуска горячего теплоносителя и отверстие для впуска холодного теплоносителя сообщены посредством одноименных каналов с установленными в них электроуправляемыми клапанами и общим трубопроводом подключены к упомянутой системе циркуляции с возможностью поочередной подачи в один из каналов соответствующего теплоносителя, датчики верхнего и нижнего положений опорного элемента установлены в углублениях внутренней поверхности упомянутого корпуса и выполнены в виде оптронов, включающих связанные оптическим каналом источники и приемники излучения в виде светодиодов и фотодиодов соответственно, а прикрепленные к опорному элементу концы упругих элементов выполнены из материала с низкой теплопроводностью, не обладающего эффектом памяти формы.
2. Манипулятор по п.1, отличающийся тем, что материал, обладающий эффектом памяти формы, из которого выполнены упругие элементы, представляет собой сплав со следующим содержанием компонентов, мас.%:
| МАНИПУЛЯТОР | 1995 |
|
RU2090353C1 |
| ПРИВОД | 1990 |
|
RU2008522C1 |
| RU 2007139250 А, 27.04.2009 | |||
| Манипулятор | 1984 |
|
SU1240574A1 |
| Рука промышленного робота | 1983 |
|
SU1225781A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

