Изобретение относится к машиностроению, а именно к промышленным роботам и манину.пяторам.
Цель изобретения -- расширение технологических возможностей робота за счет обеспечения возможности смены охвата путем исключения кинематической схвата с дополнительным 1-идроци.чиндром.
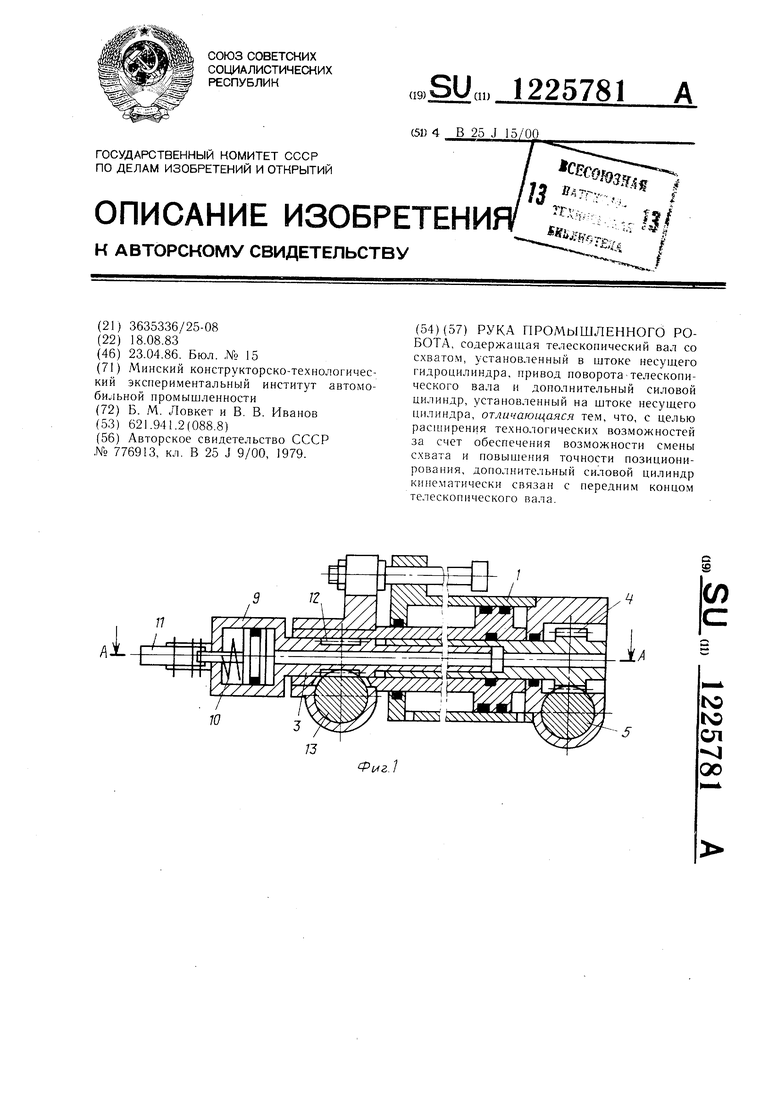
На фиг. 1 изображена рука промыпь ;1енного робота, общий вид; на фи| 2 сечение А--А на фиг. 1.
Рука нромьппленного робота содержит механизм выдвижения схвата из несущего цилиндра 1 с полым штоком 2, внутри которого находится по;1ЫЙ телескопический вал 3 с приводом ротапии, состоящим из шестерни 4, паходян1ейся в зацеплении с рейкой 5, пе- реме1паемой порп1нями цилиндров 6, установленных на задней крышке 7 necyniero цилиндра 1. Перемеплепие рейки 5 ограничивается pei-улируемыми упорами 8.
Схват, состоящий из цилиндра 9 с нружи- ной 0, нриводяп1ей в движение губки 1, установлен па переднем конце телескопического вала 3. На нем же выполнено зубчатое колесо 2, которое кипематически связано е рейкой 13, перемещаемой nopin- иями дополнительного силового цилиндра 14, установленного на переднем конце полого штока 2 несущего цилиндра 1. Рабочая полость дополнительного силового цилиндра 14 связана магистралью питания с рабог ука iipoMijinijiennoro следующим образом.
При подаче сжатого воздуха г, одну из полостей несущего цилиндра 1 (например, правую) 1о;1ЫЙ нпчж 2 со схнатол перемещается в крайнее леиое положение, раздвигая полый телескопический вал 3. При подаче сжатого воздуха в одну из полостей цилиндра 6 iiopiiieiib 1;ере 1ещает рейку 5 до одного из уноиов 8. При этом поворачивается находящаяся в .еплении с рейкой 5 шестерня 4, а в кесте с ней и полый телескопический вал 3 со схзатом. Одповремен1-:(} с зт.им воздух подается в паралле.льную цилиндру 6 :олоеть донолпи- тельно1 0 СИ..ЛОЗОГО цили11д;)а 14. При этом происходит перемещение рейки 13 и noijorjOT связанного с передним кошио.м 110л;л-(; те- леско 1ическо|-1) вала 3 зубчатого Koj;eca 12. iloBopOT происходит до тех пор, .пока пе выбраны зазо)ы в те;1ескомическом валу, а также в (.-опряжепии Н1естерь и 4 с рейкой 5. Замыкание 1Л бок 1 i схвата осуществляется сжатым воздух; М. подаваемым через полый телескопическкй ;ал 3 и правую полость |:.илиндра 9. Пр;: этом пор- п ень ци;1ипдра 9 сжимает npv/ через систему пы ипч ь зам1,п-:аст
:и
.А - А
фи.- ,.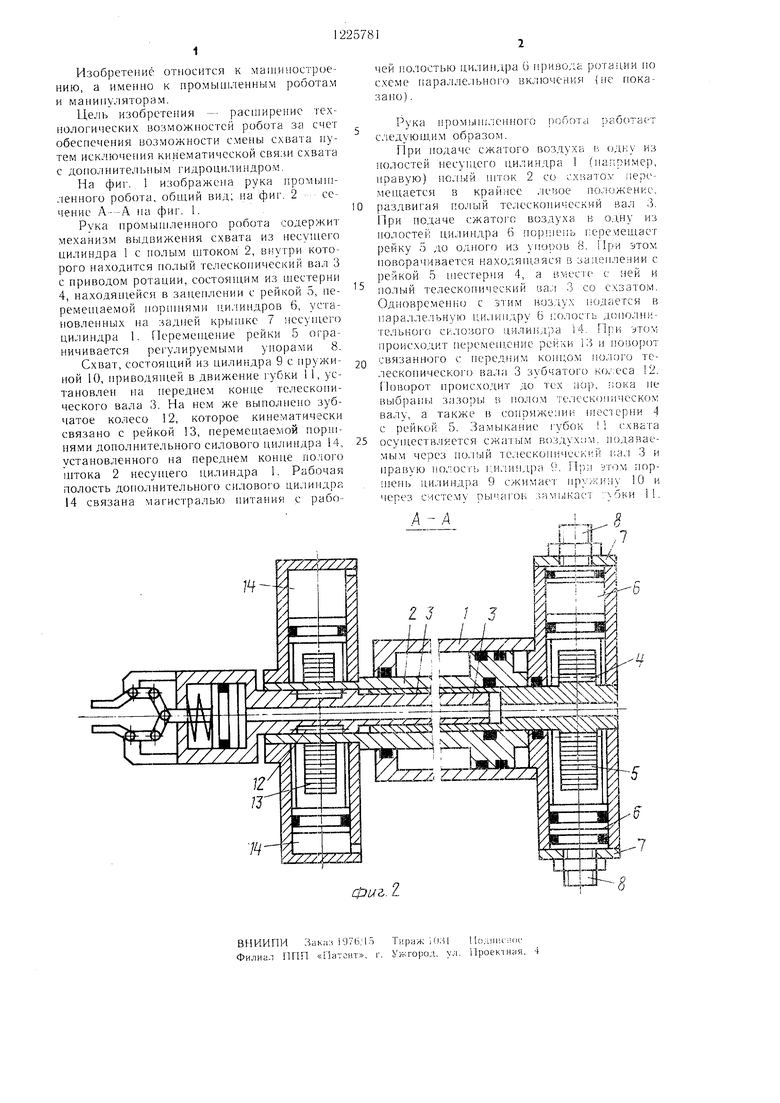
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука промышленного робота | 1979 |
|
SU776913A1 |
| Рука циклового робота | 1976 |
|
SU595143A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Промышленный робот | 1974 |
|
SU503712A1 |
| Рука манипулятора | 1984 |
|
SU1247265A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Манипулятор | 1987 |
|
SU1444140A1 |
ВНИИПИ Заказ 1976; 15 Фи..пиал Г1ПП «iiaTCHT. г
Тираж 1(.13| Ужгород, ул.
1 0;illHCi(U
Проектная. 4
| Рука промышленного робота | 1979 |
|
SU776913A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
