Известен канатный рабочий механизм экскаватора, включающий лебедку, канаты и гидравлическое демпфирующее устройство.
Цель изобретения - получение онтимальпых регулируемых рабочих усилий. Для этого на поворотной платформе экскаватора установлено связанное с лебедкой посредством каната и рычага гидравлическое демнфирующее устройство. Последнее выполнено в виде штока с поршнем, размеш,енным в цилиндре, имеюш,им предохранительный, обратный и воздушный клапаны. Кроме того, в нредлагаемом механизме шток поршня может быть выполнен полым, частично заполненным сжатым воздухом или газом. Прпчем внутренняя полость штока сообш,ена с одной из полостей цилиндра, на котором установлены регулируемые дроссели. При этом между рычагом и одним из канатов может быть установлено натяжное устройство.
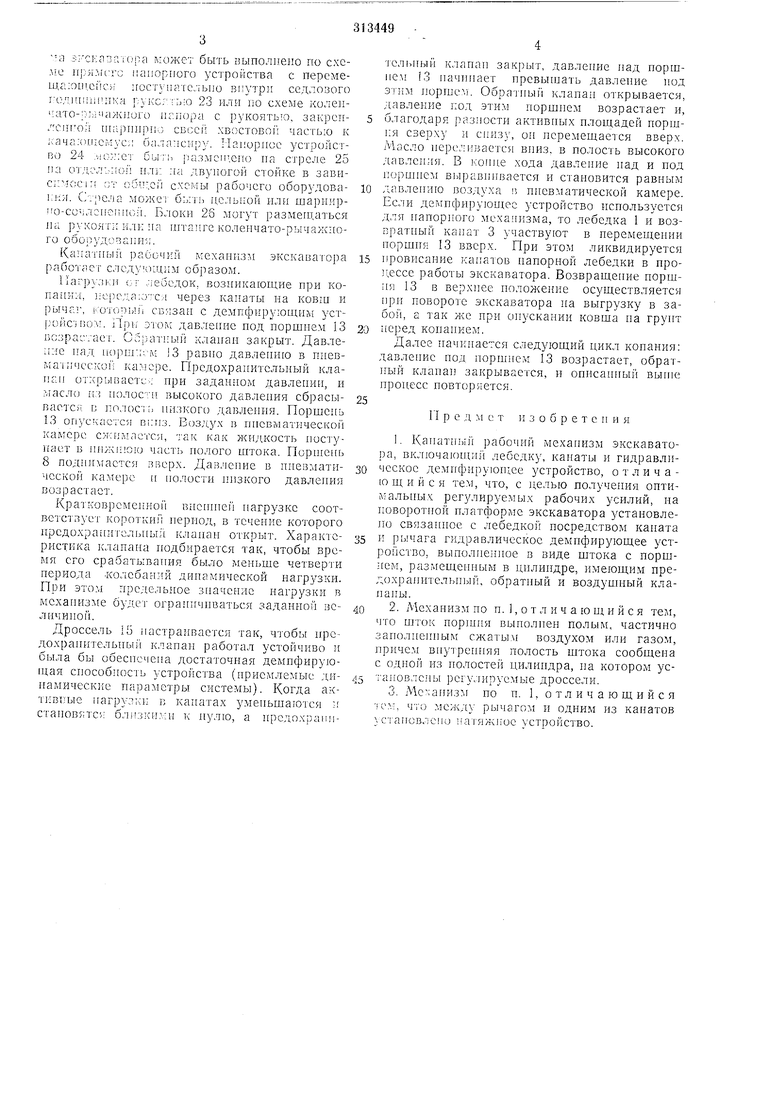
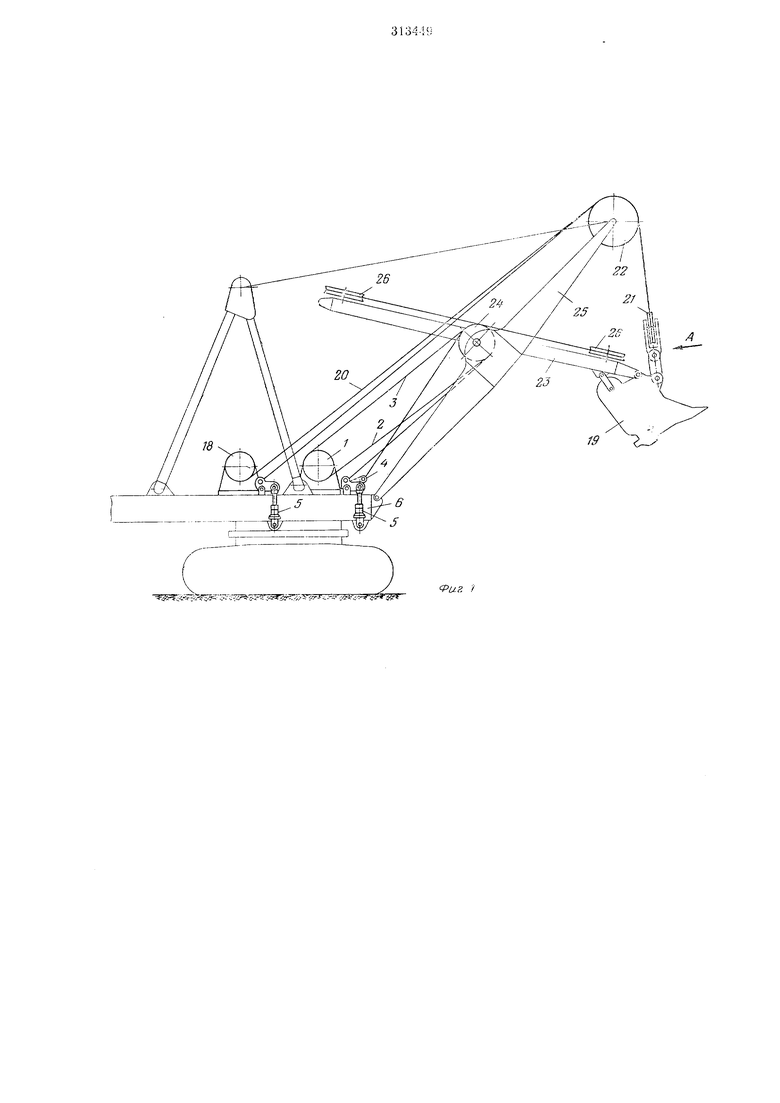
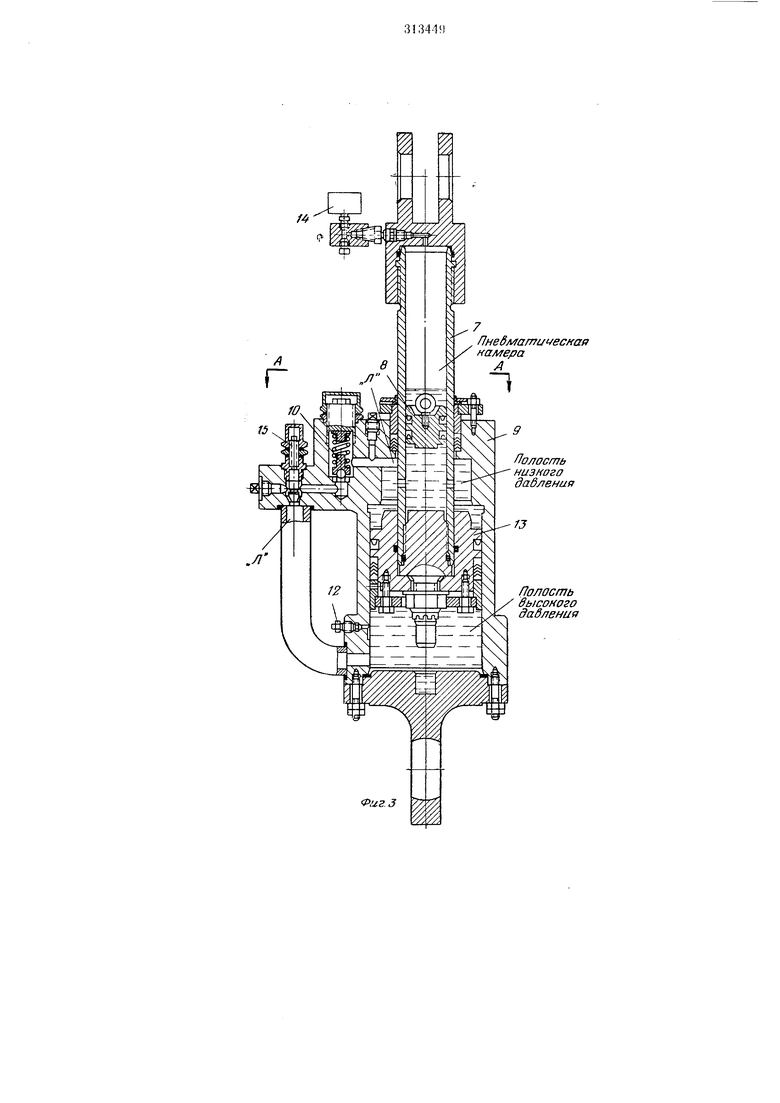
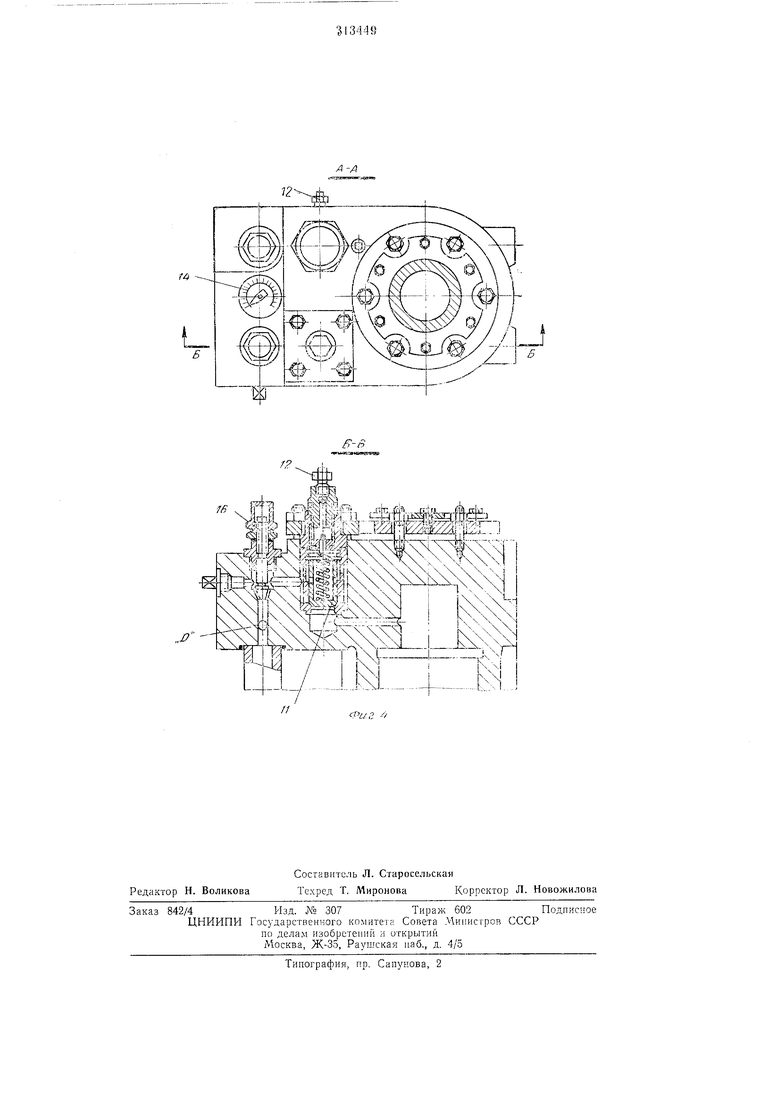
На фиг. I изображен канатный рабочий механизм, обший вид; на фиг. 2 - то же, схема занасовки канатов; на фиг. 3 - то же, продольный разрез но гидравлическому демпфпруюш,ему устройству; на фиг. 4 - разрезы по А-А и Б-Б.
Канатный рабочий механизм экскаватора включает напорную лебедку 1, напорные канаты 2, возвратные канаты 3, рычаг 4, гидравлическое демпфирующее устройство 5, закрепленное шарннрно на новоротной платфор ме 6 экскаватора и связанное с лебедкой посредством канатов и рычага.
Гидравлическое демфирующее устройство
вынолнено в внде нолого штока 7 с плавающим поршнем 8, размещенным в цилиндре 9, и.меюшем клапаны 10, 11 и 12, соответственно нредохранительный, обратный и воздушный. На штоке 7 закреплен поршень 13. Устройство снабжено манометром 14.
Рабочая жндкость устройства 5 (масло) полностью заполняет объем цилиндра над норшнем 14 н нод ним, а так же. часть объема полого штока под поршнем 8.
Компенсация различия в объемах цилиндра над поршнем 13 и под ним при его перемещении вверх - вниз осуществляется за счет внутренней полости штока, верхнюю часть которой заполняет воздух или газ. Эта часть
штока служит пневматической камерой. Внутренняя полость штока сообщается с верхней полостью цилиндра - полостью низкого давления.
На цилиндре установлены регулируемые
дроссели 15 п 16. Между рычагом и канатом 3 имеется натяжное устройство 17.
Канатный рабочий механизм может включать лебедку 18 подъема ковша 19 н подъемные канаты 20, проходящие через блоки 21 и
Yopa может быть выполнено по схсс Kciiiopnoro устройства с персме1гост л1атсльно внутри седлозого 1ч;дн1 П 1Ч1ка руксг ггло 23 или но схеме колен ато-рьл1ажного напора с рукоятью, закрепCBGciJ XBOCTOBoi; частью к
/:cino;i tiiajinnpiiG С ,1 оала: си }у. Нанориос устройст;;ачл;о цсм
во 24 ); ст быгь азмс11ено па стреле 25 ) или ла лвуногой стойке в завиiKi отлол:::( общсй схемы рабочего оборудоваci; OCi:; ;;т
i: -:;-i. С-релз : может б:..:1ь цельной или ша))iioii. Блоки 26 могут размегцаться
ио-сс;лгиеи на рукояти илн иа штаиге колеичато-рыча/хиого оборудования.
Каиати ;П1 ра6оч}1Й механиз экскаватора работает следуощим образом.
11аг) о г ; ебедок. возникающие ири косг с 1 через канаты на ковш и i связан с демпфирующим уетэтом давление под иоршием 13 ратный кланаи закрыт. Давление над норши;-м 13 равно давлению в нневмашческо : камере. Предохранительный клаигл отлрываетс-; при заданном давлении, и масл( пз нолосЛ высокого давления сбрасываете;; в нолос-;) низкого /давления. Порщень 13 опускается . Воздух в пневматической камере сжьмается, так как жил.кость поступает в нижнюю часть полого штока. Поршень 8 поднимается вверх. Давление в пневматической камере и нолоетн низкого давления возрастает.
Кратковременной внеиитей нагрузке соответствует коротки/ период, в течеине которого предохранительны; кланаи открыт. Характериетика клапаиа подбирается так, чтобы время его срабатывания было меньше четверти периода .колебаний дипамической нагрузки. При этом предельное зиачеиие нагрузки в механизме будет ограничиваться заданной величиной.
Дроссель 15 настраивается так, чтобы предохрапительпы) клапап работал уетойчиво и была бы обеспечепа достаточная демифируюндая способность устройства (приемлемые динамические параметры системы). Когда активные нагрузки в канатах уменьшаются и становятс;: блнзкимн к нулю, а нредохрапн1ел1)Нын клапап закрыт, давлепие над поршнем 13 пач1П1ает превьпиать давление под этим иоршем. Обратный клапан открывается, давление код этим норшнем возрастает и, благодаря раз 1ости актив плх площадей поршня сверху и сннз;,, он перемещается вверх. Масло переливается вниз, в полость высокого давления. В конце хода давление над и иод норшнем выравннвается и стаиовится равиым
давлению воздуха is пневматической камере. Если демпфирующее устройство используется для папорного механизма, то лебедка 1 и возпратиый канат 3 участвуют в переменаднии норшня 13 вверх. При этом ликвидируется
нровнсаиие канатов напориой лебедки в проjieece работы экскаватора. Возвращение иоршня 13 в верхнее иоложение осуществляется при повороте экскаватора иа выгрузку в забой, а так же при онуекании ковша иа грунт
перед копан:кем.
Далее пачкнаетея следующий цикл коиания: давление под поршнем 13 возрастает, обратный кланап закрывается, п опнса1И1ЫЙ выше пронесс повторяется.
П р е д м е т и з о б р е т е п и я
1, Капатный рабочий механизм экскаватора, включаюши лебедку, канаты и гидравлическое демггфируюн ее устройство, отличающийся тем, что, с целью получения оптимальных регулируемых рабочих усилий, па новоротной платформе экскаватора установлепо связапное е лебедкой посредством каната
н рычага гидравлическое демпфирующее устpofiCTBo, выиолиенпое в виде штока с порщием, размещегитым в цилиндре, имеющим предохрапнтельпьн, обратпый и воздушный клапаны.
2. Механизм но и. 1, от л и ч а ю HJ, и и ся тем, что шток норшня выполнен полым, частично заполненным сжатым воздухом или газом, причем внутренняя полость штока сообшеиа с одной нз полостей цилиндра, па котором установлсны регулируемые дроесели.
3. Ме:апиз:л по п. 1, о т л и ч а ю щ и и с я iCM, что между рычагом и одиим из канатов стаповлено натяжное уетройетво.
.
Пнебмати еская номера Л
Полость ниэного дадлениа
/J
Полость высоного давления
иг. 3
- -j-frijxvf
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧЕЕ ОБОРУДОВАНИЕ ЭКСКАВАТОРА | 1971 |
|
SU312928A1 |
| Экскаватор-драглайн | 1989 |
|
SU1810426A1 |
| ИСКУССТВЕННОЕ СЕРДЦЕ | 1973 |
|
SU404196A1 |
| Подвесная канатная дорога маятникового типа | 1977 |
|
SU737275A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ КАНАТОВ КАРЬЕРНОГО ЭКСКАВАТОРА | 2008 |
|
RU2425194C2 |
| УСТРОЙСТВО для ПОДАЧИ ИНСТРУМЕНТА ПРИ УДАРНО-КАНАТНОМ БУРЕНИИ | 1972 |
|
SU348713A1 |
| Подвесная канатная дорога маятникового типа | 1979 |
|
SU927603A1 |
| ГИДРОПРИВОД одноковшового ЭКСКАВАТОРА | 1968 |
|
SU231395A1 |
| Гидравлический предохранитель | 1969 |
|
SU314437A1 |
| УСТРОЙСТВО для ВСТРЯХИВАНИЯ ПЛАТФОРМЫ САМОСВАЛА | 1966 |
|
SU179627A1 |
PuZ -/
