Изобретение относится к землеройной технике типа одноковшовых экскаваторов с канатной тягой, используемых для разработки и погрузки грунта.
Известные экскаваторы с канатной тягой имеют жесткое посредством тяги заданной длины крепление ковша к рукояти (см., например, экскаватор ЭО-4112 на сайте http://www.t330.ru/eo4112.him). Производственные наблюдения рабочего процесса копания такими экскаваторами с рабочим оборудованием типа обратная лопата показали, что главной причиной снижения его эксплуатационной производительности является потеря части зачерпнутого грунта на участке подъема и переноса его к месту выгрузки. Это обусловлено, прежде всего, конструктивными особенностями жесткого крепления ковша к рукояти, при котором положение ковша определяется только двумя угловыми координатами: углами поворота стрелы - φстр и рукояти - φр. Это в принципе исключает возможность рационального положения ковша на соответствующем участке траектории (заглубления, зачерпывания, транспортирования, выгрузки). На гидравлических экскаваторах эта проблема решается путем шарнирного соединения ковша с рукоятью и управлением его поворотом дополнительным гидроцилиндром, т.е. положение ковша в этом случае определяется уже тремя координатами - φстр, φр и углом поворота ковша - φк. Для экскаваторов с тросовой подвеской шарнирное крепление ковша к рукояти требует дополнительного устройства управления его поворотом. При этом известные схемы внешнего воздействия на ковш практически невозможно согласовать с существующей конструкцией рабочего оборудования.
Решение этого вопроса возможно только за счет дополнительной кинематической связи ковша с рукоятью и/или стрелой и реализующей внутренние усилия, обусловленные соответствующим взаимным расположением стрелы и рукояти. Известно решение (архив КБ Донецкого экскаваторного завода, г.Донецк, Ростовской обл.), где жесткая тяга шарнирно соединяет ковш не с рукоятью, а со стрелой. В этом случае при повороте рукояти относительно стрелы, жесткая тяга стремится развернуть ковш относительно рукояти. Причем если происходит работа тяговым канатом и рукоять поворачивается относительно стрелы по часовой стрелке, то и ковш поворачивается в этом же направлении. Это позволяет осуществлять более интенсивное зачерпывание, а при выходе из забоя иметь положение ковша, при котором он максимально заполнен разрабатываемым грунтом.
Однако это решение имеет существенный недостаток, а именно - невозможность производить забор грунта на расстоянии более половины от максимального рабочего радиуса копания. Это обусловлено тем, что на максимальном вылете жесткая тяга разворачивает ковш до такой степени, что он вместо входа в грунт зубьями ложится на него тяговым блоком.
Этот недостаток не позволил реализовать эту схему на практике.
Достижение искомого результата возможно путем объединения основных достоинств двух рассмотренных схем, для чего необходимо одновременно шарнирно соединить ковш двумя тягами переменной длины. Одной тягой с рукоятью, а другой со стрелой, причем тяги должны иметь возможность промежуточной фиксации длины, т.е. при необходимости становиться жесткими. Очевидно, что работа экскаватора при такой схеме закрепления ковша может происходить только в двух случаях - если обе тяги одновременно могут изменять свою длину или в случае, когда длина одной из них (любой) жестко зафиксирована. При жесткой фиксации обеих тяг работа невозможна.
В качестве тяг переменной длины можно использовать гидроцилиндры. Они в полной мере удовлетворяют заданным условиям: способны выдерживать большую нагрузку, изменять длину (ход), плавно и четко фиксироваться в любом положении, просты в управлении.
Известно рабочее оборудование одноковшового экскаватора с канатным приводом по А.с. СССР №1420116, которое принято в качестве прототипа. По этому изобретению дополнительный поворот ковша осуществляется посредством гидроцилиндра поворота, который через управляющий гидрораспределитель гидравлически связан с гидроцилиндром механизма подъема и гидроаккумулятором. Однако это решение возможно только для экскаваторов с прямой лопатой, где процесс зачерпывания осуществляется по поверхности штабеля, отклоняющейся от экскаватора, что не препятствует размещению гидроцилиндра механизма подъема. Работа копания экскаватором с обратной лопатой невозможна по такой конструктивной схеме по двум причинам:
- гидроцилиндр подъема препятствует внедрению ковша в забой (т.е. делает процесс копания невозможным в принципе);
- так как усилие копания значительно превышает усилия зачерпывания, то для возможного поворота ковша в забое необходимо соотношение диаметров гидроцилиндров поворота и механизма подъема намного больше реальных возможностей конструкции.
Задачей изобретения является повышение производительности экскаватора.
Технический результат достигается тем, что оно снабжено регулируемым дросселем и двумя гидроцилиндрами - тягами переменной длины, при этом первый гидроцилиндр соединяет ковш с рукоятью, а второй соединяет ковш со стрелой, причем полости каждого из гидроцилиндров могут соединяться между собой через гидрораспределитель поочередно, или одновременно при соединении полостей первого гидроцилиндра через регулируемый дроссель.
Преимуществом предлагаемого изобретения является:
1. Предложенная схема дополнительного манипулирования ковшом в соответствии с условиями каждого этапа рабочего процесса копания является полностью автономной и не требует внешнего источника энергии.
2. Простота предложенного решения позволяет с минимальными затратами реализовать его как на новой так и находящейся в эксплуатации технике, что значительно увеличит ее конкурентоспособность по отношению к гидравлическим экскаваторам.
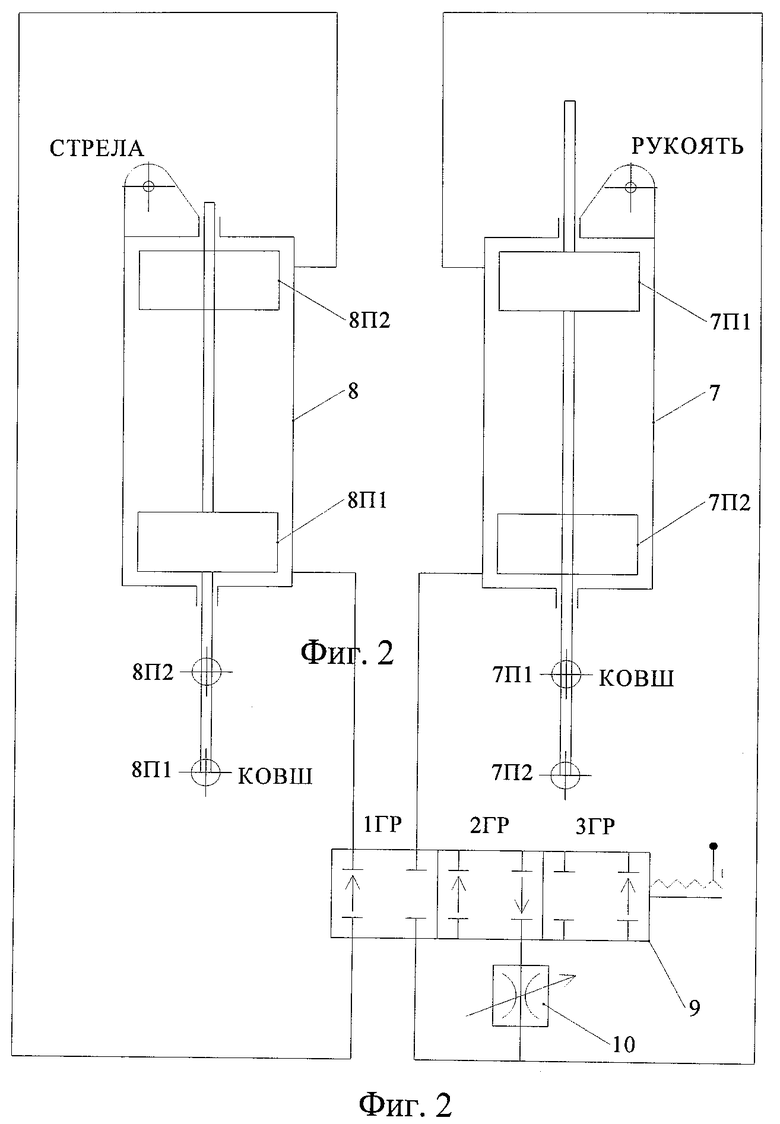
На фиг.1 изображено рабочее оборудование с установленными двумя гидроцилиндрами (тягами переменной длины), один из которых соединяет ковш с рукоятью, а другой соединяет ковш со стрелой. На фиг.2 показана гидрокинематическая схема рабочего оборудования.
Рабочее оборудование экскаватора содержит стрелу 1, нижняя часть которой соединена с платформой экскаватора 2, а верхняя с рукоятью 3. В свою очередь, нижний конец рукояти 3 шарнирно соединен с ковшом 4, а верхний через подъемный канат 5 с подъемной лебедкой (не показана). Ковш 4 посредством тягового каната 6 соединен с тяговой лебедкой (не показана), а его внешняя поверхность соединена посредством гидроцилиндра (тяги переменной длины) 7 с рукоятью 3, а посредством гидроцилиндра (тяги переменной длины) 8 со стрелой 1. Полости каждого из гидроцилиндров 7 и 8 соединяются между собой через 3-позиционный гидрораспределитель 9. При этом в первой позиции гидрораспределителя 9 (обозначено - 1ГР) полости гидроцилиндра 8 соединены между собой, а полости гидроцилиндра 7 разомкнуты. Во второй позиции гидрораспределителя 9 (обозначено - 2ГР) полости гидроцилиндров 7 и 8 соответственно соединены, причем соединение полостей гидроцилиндра 7 осуществляется через регулируемый дроссель 10. В третьей позиции гидрораспределителя 9 (обозначено - 3ГР) полости гидроцилиндра 8 разомкнуты, а полости гидроцилиндра 7 соединены.
На фиг.1 так же обозначена тонкой линией 11-12-13-14-15-11 - траектория движения передней (режущей) кромки ковша 4, где точками 11, 12, 13, 14 и 15 показаны наиболее характерные для процесса копания и выгрузки положения ковша.
На фиг.2 обозначены: 7П1 и 7П2 - крайние положения поршня и штока гидроцилиндра 7; 8П1 и 8П2 - крайние положения поршня и штока гидроцилиндра 8; 1ГР, 2ГР и 3ГР - рабочие положения гидрораспределителя 9.
Рабочее оборудование экскаватора работает следующим образом.
Управление рабочим оборудованием (стрела 1, рукоять 3, ковш 4) на участке позиционирования ковша 4 на забой - 11-12 осуществляется подъемным канатом 5, при этом положение ковша 4 относительно рукояти 3 определяется зафиксированным «сжатым» состоянием гидроцилиндра 7 (положение штока и поршня - 7П1), а гидроцилиндр 8 находится в свободном «плавающем» положении. Это обеспечивается нахождением гидрораспределителя 9 в позиции 1ГР.
На участке заглубления (копания) - 12-13 управление рабочим оборудованием осуществляется тяговым канатом 6, ковш 4 по-прежнему зафиксирован в первоначальном положении (гидроцилиндр 7 закрыт в крайнем сжатом положении, а гидроцилиндр 8 открыт для обеспечения его свободного перемещения (изменения длины)).
В момент наибольшего заглубления (точка 13) гидрораспределитель переводится в позицию 2ГР, при котором гидроцилиндры 7 и 8 открыты и дальнейшее движение рукояти 3 сопровождается одновременным за счет усилия тягового каната 6 поворотом ковша 4 относительно рукояти 3, причем поворот ковша происходит постепенно на всем участке зачерпывания 13-14. Такой плавный поворот ковша 4 осуществляется за счет перелива жидкости в гидроцилиндре 7 с подпором через регулируемый дроссель 9. При этом гидроцилиндр 8 сжимается, а гидроцилиндр 7 растягивается. Процесс зачерпывания оканчивается при достижении точки 14. Положение ковша 4 при этом соответствует его максимальному заполнению.
Для сохранения этого благоприятного положения ковша 4 при подъеме грунта из забоя (траектория 14-15 обеспечивается подъемом стрелы 1 подъемным канатом 5) следует перевести ковш на управление гидроцилиндром 8 (связь ковш-стрела), для чего он фиксируется (закрывается) в крайнем сжатом положении (положение штока и поршня 8П2) переводом гидрораспределителя 9 в позицию 3ГР.
После перевода ковша 4 к пункту разгрузки посредством поворота платформы экскаватора 2 лебедка тягового каната 6 растормаживается и производится выгрузка ковша на участке 15-11 за счет поворота рукояти подъемным канатом 5, при этом зафиксированный в положении 8П2 гидроцилиндр 8 (позиция 3ГР гидрораспределителя 9) способствует дополнительному развороту ковша 4 в сторону разгрузки, что сопровождается, в свою очередь, «сжатием» гидродомкрата 7 до положения 7П1.
После разгрузки ковша 4 гидрораспределитель 9 переводится в позицию 1ГР и рабочий цикл повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сменное оборудование драглайна к одноковшовому гидравлическому экскаватору | 1991 |
|
SU1810423A1 |
| Способ копания одноковшовым гидравлическим экскаватором и одноковшовый гидравлический экскаватор | 1982 |
|
SU1016433A1 |
| Гидропривод одноковшового экскаватора | 1980 |
|
SU949092A1 |
| Рабочее оборудование гидравлического одноковшового экскаватора | 1969 |
|
SU626168A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО КАНАТНОГО ЭКСКАВАТОРА | 2011 |
|
RU2488661C2 |
| Рабочее оборудование одноковшового экскаватора | 1982 |
|
SU1027338A1 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
| Гидропривод землеройной машины | 1980 |
|
SU1036862A1 |
| Рабочее оборудование одноковшового экскаватора | 1975 |
|
SU692941A1 |
| Гидропривод одноковшового экскаватора | 1986 |
|
SU1308722A1 |

Изобретение относится к землеройной технике типа одноковшовых экскаваторов с канатной тягой, используемых для разработки и погрузки грунта. Техническим результатом является повышение производительности экскаватора. Рабочее оборудование одноковшового экскаватора содержит стрелу, рукоять, ковш, гидроцилиндры управления ковша, подключенные к гидрораспределителю, и канатный привод. При этом рабочее оборудование снабжено регулируемым дросселем и двумя гидроцилиндрами - тягами переменной длины. Первый гидроцилиндр соединяет ковш с рукоятью, а второй соединяет ковш со стрелой, причем полости каждого из гидроцилиндров могут соединяться между собой через гидрораспределитель как поочередно, так и одновременно при соединении полостей первого гидроцилиндра через регулируемый дроссель. 2 ил.
Рабочее оборудование одноковшового экскаватора, содержащее стрелу, соединенную с рукоятью, на нижней части которой шарнирно закреплен ковш, гидроцилиндры управления положением ковша, подключенные к гидрораспределителю, и канатный привод, отличающееся тем, что оно снабжено регулируемым дросселем и двумя гидроцилиндрами - тягами переменной длины, при этом первый гидроцилиндр соединяет ковш с рукоятью, а второй соединяет ковш со стрелой, причем полости каждого из гидроцилиндров могут соединяться между собой через гидрораспределитель поочередно, или одновременно при соединении полостей первого гидроцилиндра через регулируемый дроссель.
| Рабочее оборудование одноковшового экскаватора с канатным приводом | 1986 |
|
SU1420116A1 |
| Устройство для управления ковшом экскаватора | 1976 |
|
SU599025A1 |
| Рабочее оборудование экскаватора | 1975 |
|
SU619584A1 |
| Рабочее оборудование одноковшового экскаватора | 1985 |
|
SU1263759A2 |
| ЭКСКАВАТОР ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДОВ | 1990 |
|
RU2029828C1 |
| КОЛЛИМАТОРНЫЙ ВИЗИР | 0 |
|
SU365679A1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ НА ОНРАВКУ СЛОИСТЫХ ОБОЛОЧЕК ВРАЩЕНИЯ | 1972 |
|
SU435128A1 |
| Устройство для управления однофазным инвертором | 1971 |
|
SU450304A1 |
| US 3843095 А1, 22.10.1974. | |||

