(54) СХВАТ МИКРОМАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват микроманипулятора | 1980 |
|
SU867647A1 |
| Схват микроманипулятора | 1981 |
|
SU1009756A1 |
| Схват микроманипулятора | 1989 |
|
SU1703450A1 |
| Схват микроманипулятора | 1988 |
|
SU1602735A1 |
| Микроманипулятор | 1980 |
|
SU867645A1 |
| Схват микроманипулятора | 1987 |
|
SU1516348A1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| Устройство для измерения угла отклонения от вертикали | 1979 |
|
SU964443A2 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ МИКРОСХВАТ | 2009 |
|
RU2417876C1 |
| Датчик измерителя интенсивности акустического поля | 1979 |
|
SU772609A1 |
I
Изобретение относится к приборостроению и может быть использовано при разработке конструкции микророботов и микроманипуляторов.
Известны схваты микроманипуляторов, состоящие из пневматических симметрических пружин, выполняющих роль привода для перемещения фиксирующих губок и создания усилия прижима в контакте с изделием 1.
Недостатком таких схватов является необходимость в отдельно устанавливаемых j сенсорных датчиках, что является сложной задачей, так как схваты микроманипуляторов являются весьма миниатюрными.
Известны также схваты манипуляторов, содержащие губки, укрепленные на подвиж- j ных рычагах, привод рычагов, сенсорные датчики, выходы которых соединены со входами блока управления, подключенного ко входам блока питания 2.
Недостатками известного устройства являются сложность конструкции и малая 20 чувствительность.
Цель изобретения - повыщение чувствительности и упрощение конструкции.
Поставленная цель достигается тем, что каждая губка выполнена в виде сектора пьезокерамического кольца, на внутренней цилиндрической поверхности которого через изоляционную прокладку прикреплена, например приклеена , упругая в радиальном направлении сектора, металлическая полоса, а к внещней поверхности пьезокерамического сектора прикреплен подвижной конец рычага, на двух противоположных поверхностях пьезокерамического сектора, например на торцовых, нанесены электроды в виде покрытий, а сенсорными датчи-. ками служат по периметру сектора выделенные несколько маленьких участков электродов, которые, через измерители напряжения и масщтабные блоки, соединены с блоком управления.
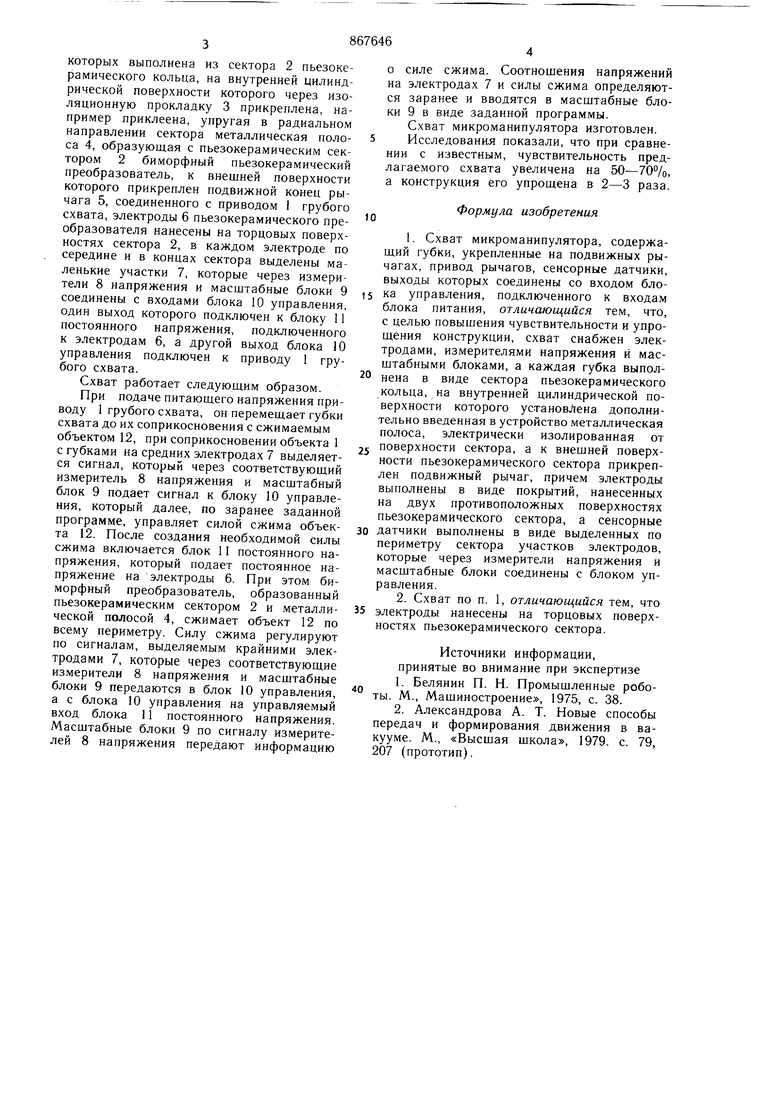
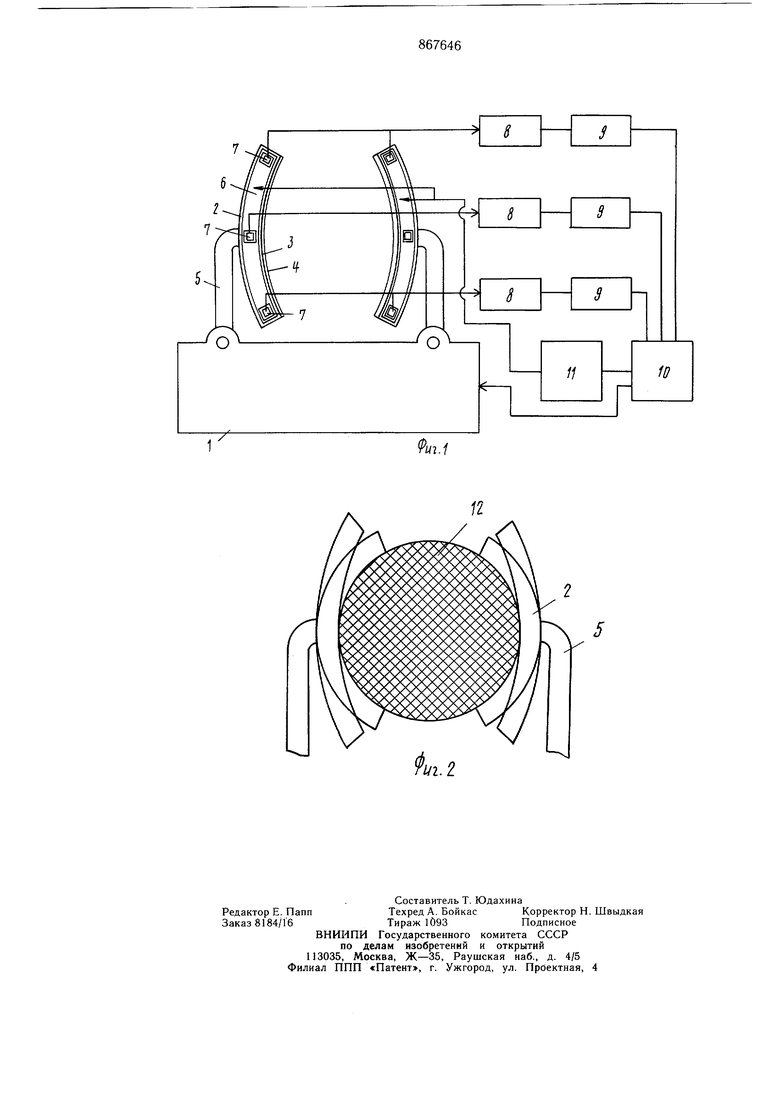
На фиг. 1 схематически изображено конструктивное рещение схвата и электрическая схема управления им; на фиг. 2 показаны губки схвата и момент их соприкосновения со сжимаемым объектом и в положении при окончательном обхвате объекта.
Схват микроманипулятора содержит привод 1 грубого схвата, губки, каждая из
которых выполнена из сектора 2 пьезокерамического кольца, на внутренней цилиндрической поверхности которого через изоляционную прокладку 3 прикреплена, например приклеена, упругая в радиальном направлении сектора металлическая полоса 4, образующая с пьезокерамическим сектором 2 биморфный пьезокерамический преобразователь, к внешней поверхности которого прикреплен подвижной конец рычага 5, соединенного с приводом 1 грубого охвата, электроды 6 пьезокерамического преобразователя нанесены на торцовых поверхностях сектора 2, в каждом электроде по середине и в концах сектора выделены маленькие участки 7, которые через измерители 8 напряжения и масштабные блоки 9 соединены с входами блока 10 управления, один выход которого подключен к блоку 11 постоянного напряжения, подключенного к электродам 6, а другой выход блока 10 управления подключен к приводу 1 грубого схвата.
Схват работает следующим образом.
При подаче питающего напряжения приводу 1 грубого схвата, он перемещает губки схвата до их соприкосновения с сжимаемым объектом 12, при соприкосновении объекта 1 с губками на средних электродах 7 выделяется сигнал, который через соответствующий измеритель 8 напряжения и масштабный блок 9 подает сигнал к блоку 10 управления, который далее, по заранее заданной программе, управляет силой сжима объекта 12. После создания необходимой силы сжима включается блок 11 постоянного напряжения, который подает постоянное напряжение на электроды 6. При этом биморфный преобразователь, образованный пьезокерамическим сектором 2 и металлической полосой 4, сжимает объект 12 по всему периметру. Силу сжима регулируют по сигналам, выделяемым крайними электродами 7, которые через соответствующие измерители 8 напряжения и масштабные блоки 9 передаются в блок 10 управления, а с блока 10 управления на управляемый вход блока 11 постоянного напряжения. Масштабные блоки 9 по сигналу измерителей 8 напряжения передают информацию
о силе сжима. Соотношения напряжений на электродах 7 и силы сжима определяются заранее и вводятся в масштабные блоки 9 в виде заданной программы,
Схват микроманипулятора изготовлен. Исследования показали, что при сравнении с известным, чувствительность предлагаемого схвата увеличена на 50-70%, а конструкция его упрощена в 2-3 раза.
Формула изобретения
поверхности сектора, а к внешней поверхности пьезокерамического сектора прикреплен подвижный рычаг, причем электроды выполнены в виде покрытий, нанесенных на двух противоположных поверхностях пьезокерамического сектора, а сенсорные
датчики выполнены в виде выделенных по периметру сектора участков электродов, которые через измерители напряжения и масштабные блоки соединены с блоком управления.
Источники информации, принятые во внимание при экспертизе
5
