Область техники, к которой относится изобретение
Настоящее изобретение в общем относится к системе и способу управления и более конкретно к системе и способу управления независимой компоновкой дозирующего клапана.
Уровень техники
В рабочих машинах, таких как, например, экскаваторы, погрузчики, бульдозеры, автогрейдеры, и в других типах тяжелых машин используют множество устройств гидравлического привода для выполнения различных задач. Скоростью работы этих устройств привода обычно управляют на основе положения активации устройства интерфейса оператора. Например, устройство интерфейса оператора, такое как джойстик, педаль или любое другое соответствующее устройство интерфейса оператора, может перемещаться для генерирования сигнала, обозначающего требуемую скорость соответствующего устройства гидравлического привода. Когда оператор перемещает назад устройство интерфейса, оператор ожидает, что устройство гидравлического привода будет перемещаться с ассоциированной заданной скоростью. Однако такую заданную скорость устанавливают во время изготовления рабочей машины обычно без приложения нагрузки к устройству гидравлического привода. Во время работы рабочей машины, когда нагрузка, прикладываемая к устройству гидравлического привода, мала, устройство гидравлического привода может перемещаться со скоростью, которая, по существу, соответствует ожидаемой оператором скорости. Однако, когда приложенная нагрузка к устройству гидравлического привода большая, устройство гидравлического привода может перемешаться с более малой и неожиданной или нежелательной скоростью. Попытки управления скоростью устройства гидравлического привода, независимо от нагрузки, приводят к резким движениям или движениям рывками устройства гидравлического привода.
Один способ улучшения предсказуемости скорости работы устройства гидравлического привода при обеспечении плавной работы устройства гидравлического привода описан в патенте США №6,880,332 (патент '332), выданном авторам Pfaff и др. 19 апреля 2005 г. В патенте '332 описано устройство гидравлического привода, управляемое электрогидравлическими пропорциональными клапанами для работы в разных режимах дозирования. Сигнал положения джойстика преобразуется в сигнал требуемой скорости для устройства гидравлического привода. Сигнал требуемой скорости затем используют для формирования команды, представляющей величину открытого зазора каждого из электрогидравлических пропорциональных клапанов для управления устройством гидравлического привода с требуемой скоростью. Нагрузку устройства гидравлического привода определяют путем измерения давления, ассоциированного с устройством гидравлического привода, и устройство гидравлического привода работает в разных режимах на основе определенной нагрузки. Стратегию перехода используют для переходов между режимами работы, в которой давление в линии подачи и обратной линии устанавливают по пороговым значениям давления, требуемым для нового режима работы, перед переходом со старого режима работы.
Хотя устройство гидравлического привода и стратегия управления в соответствии с патентом '332 позволяют улучшить предсказуемость скорости работы устройства гидравлического привода, работающего с разной нагрузкой, благодаря тому, что режим работы основан на измеряемых условиях нагрузки, оно может быть сложным и может не обеспечивать достаточную степень управления. В частности, поскольку каждым из электрогидравлических пропорциональных клапанов управляют на основе сигнала требуемой скорости, стратегия управления может быть сложной и может требовать точного установления момента времени и калибровки для исключения нежеланных взаимодействий между клапанами. Кроме того, поскольку величина зазора в клапане основана исключительно на требуемом значении скорости, флуктуации давления могут отрицательно влиять на предсказуемость устройства гидравлического привода.
Раскрытая система гидравлического управления направлена на преодоление одной или больше проблем, представленных выше.
Раскрытие изобретения
Согласно изобретению система гидравлического управления содержит:
устройство гидравлического привода, имеющее первую камеру и вторую камеру;
первый дозирующий клапан, имеющий элемент клапана, перемещающийся между первым положением, в котором жидкость под давлением может поступать в первую камеру, обеспечивая движение устройства гидравлического привода в первом направлении, и вторым положением, в котором подача жидкости под давлением в первую камеру блокируется;
второй дозирующий клапан, имеющий элемент клапана, перемещающийся между первым положением, в котором жидкость может вытекать из второй камеры, обеспечивая движение устройства гидравлического привода в первом направлении, и вторым положением, в котором вытекание жидкости из второй камеры блокируется;
по меньшей мере, один датчик жидкости, связанный с устройством гидравлического привода и выполненный с возможностью генерировать сигнал нагрузки, обозначающий нагрузку устройства гидравлического привода;
устройство интерфейса оператора, выполненное с возможностью передвижения для генерирования сигнала требуемой скорости, обозначающего требуемую для оператора скорость устройства гидравлического привода; и
контроллер, сообщающийся с первым и вторым дозирующими клапанами, по меньшей мере, одним датчиком жидкости и устройством интерфейса оператора, причем контроллер выполнен с возможностью перемещения элемента клапана первого дозирующего клапана в положение между первым и вторым положениями, на основе сигнала требуемой скорости, и перемещения элемента клапана второго дозирующего клапана в положение между первым и вторым положениями на основе сигнала нагрузки и требуемого давления во второй камере.
Целесообразно, чтобы контроллер был выполнен с возможностью модификации положений элемента клапана первого и второго дозирующих клапанов на основе ускорения устройства гидравлического привода.
Предпочтительно система гидравлического управления дополнительно включает в себя источник жидкости под давлением, и контроллер выполнен с возможностью:
определения, возможна ли регенерация гидравлической энергии на основе сигнала нагрузки;
осуществления регенерации с величиной, основанной на положении устройства интерфейса оператора; и
регулирования выхода источника на основе величины регенерации и сигнала требуемой скорости.
Возможно выполнение системы гидравлического управления, в которой:
по меньшей мере, один датчик жидкости представляет собой первый датчик давления, соединенный с первой камерой;
система гидравлического управления дополнительно включает в себя второй датчик давления, соединенный со второй камерой; и
контроллер дополнительно выполнен с возможностью осуществления стратегии перехода, когда давление в первой камере понижается ниже заданного значения.
Система гидравлического управления может быть выполнена таким образом, что стратегия перехода включает в себя:
обеспечивают возможность роста давления во второй камере на основе сигнала нагрузки после того, как давление в первой камере достигает заданного значения;
поддерживают давление в первой камере на уровне заданного значения до тех пор, пока давление во второй камере не достигнет второго заданного значения;
обеспечивают возможность падения давления в первой камере ниже заданного значения после того, как давление во второй камере достигнет второго заданного значения;
поддерживают давление во второй камере на уровне второго заданного значения до тех пор, пока давление в первой камере не достигнет минимального заданного значения; и
обеспечивают возможность превышения давления во второй камере второго заданного значения на основе сигнала нагрузки после того, как давление в первой камере достигнет минимального заданного значения.
Другим объектом изобретения является способ работы системы гидравлического управления, включающий следующие приемы:
дозируют подачу жидкости под давлением в первую камеру (56) устройства (30с) гидравлического привода для обеспечения возможности движения устройства гидравлического привода в первом направлении;
дозируют выпуск жидкости из второй камеры (58) устройства гидравлического привода для обеспечения возможности движения устройства гидравлического привода в первом направлении;
измеряют нагрузку, воздействующую на устройство гидравлического привода, и генерируют сигнал нагрузки, обозначающий эту нагрузку;
принимают сигнал требуемой скорости, обозначающий требуемую для оператора скорость устройства гидравлического привода;
дозируют подачу жидкости в первую камеру на основе сигнала требуемой скорости; и
дозируют выпуск жидкости из второй камеры на основе сигнала нагрузки и требуемого давления во второй камере.
Целесообразно, чтобы в способе дополнительно осуществлялось:
определение, возможно ли регенерирование гидравлической энергии на основе сигнала нагрузки;
регенерирование с величиной, которая основана на сигнале требуемой скорости; и
регулирование выхода источника жидкости под давлением на основе величины регенерирования и сигнала требуемой скорости.
Измерение нагрузки может включать в себя: измерение давления в первой камере и давления во второй камере, при этом способ дополнительно включает в себя следующее: осуществляют стратегию перехода, когда давление в первой камере понижается ниже заданного значения.
Предпочтительно стратегия перехода включает в себя следующее:
обеспечивают возможность повышения давления во второй камере на основе сигнала нагрузки после того, как давление в первой камере достигнет заданного значения;
поддерживают давление в первой камере на заданном значении до тех пор, пока давление во второй камере не достигнет второго заданного значения;
обеспечивают возможность понижения давления в первой камере ниже заданного значения после того, как давление во второй камере достигнет второго заданного значения;
поддерживают давление во второй камере на втором заданном значении до тех пор, пока давление в первой камере не достигнет минимального заданного значения; и
обеспечивают возможность превышения давления во второй камере второго заданного значения на основе сигнала нагрузки после того, как давление в первой камере достигнет минимального заданного значения.
Еще одним объектом является рабочая машина, содержащая:
источник энергии;
рабочий инструмент; и
систему гидравлического управления, описанную выше, функционально соединенную с источником энергии и выполненную с возможностью влияния на движение рабочего инструмента.
Краткое описание чертежей
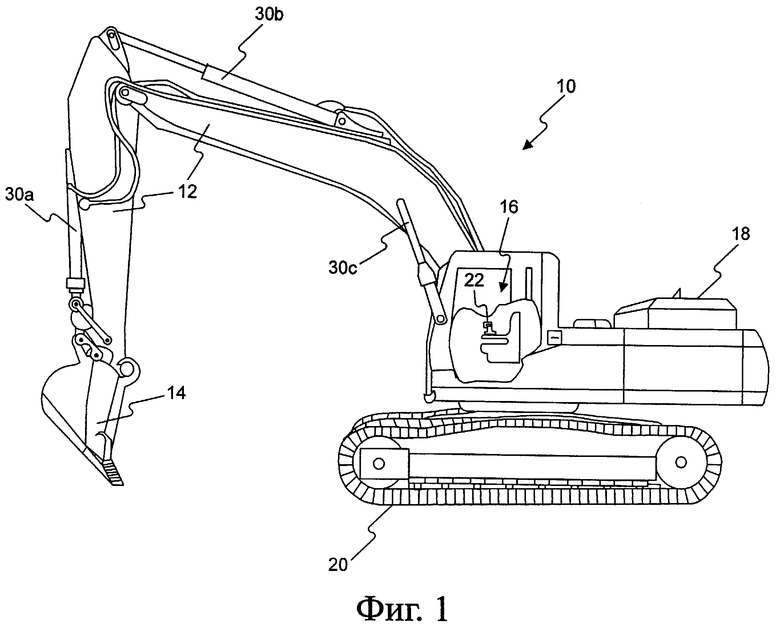
На фиг.1 показана схематичная иллюстрация вида сбоку примера раскрытой рабочей машины;
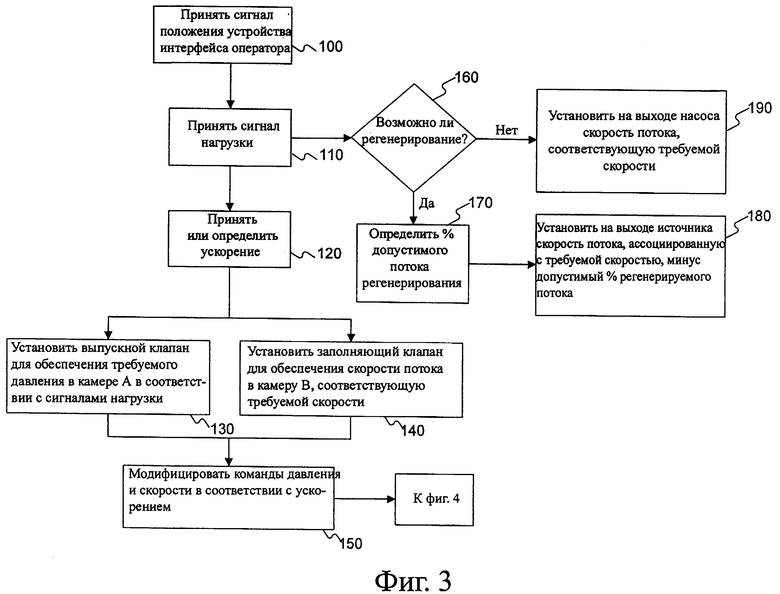
на фиг.2 представлена схематичная иллюстрация примера раскрытой системы гидравлического управления для рабочей машины по фиг.1;
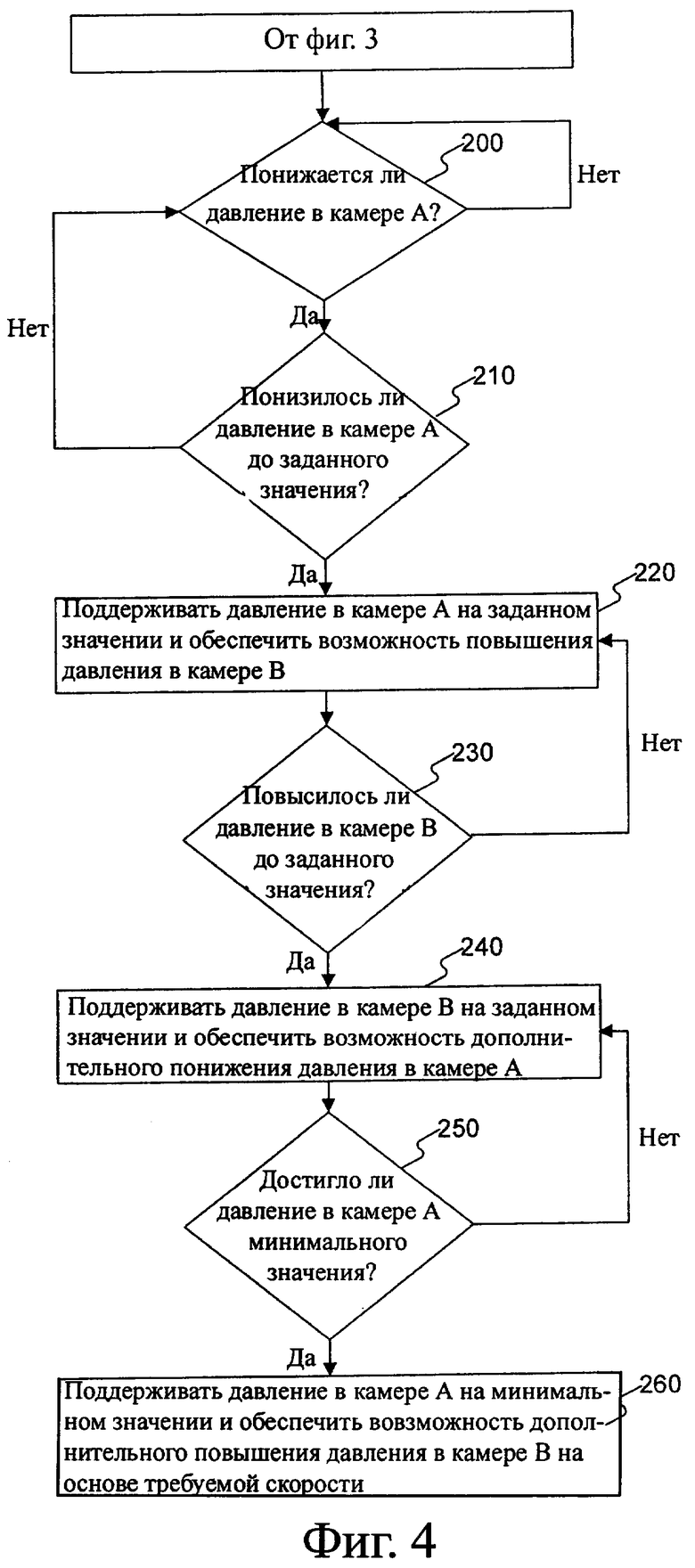
на фиг.3 показана блок-схема последовательности операций, иллюстрирующая примерный раскрытый способ работы системы управления по фиг.2; и
на фиг.4 показана блок-схема последовательности операций, иллюстрирующая другой примерный раскрытый способ работы системы управления по фиг.2.
Осуществление изобретения
На фиг.1 иллюстрируется пример рабочей машины 10, имеющей множество компонентов. Рабочая машина 10 может быть стационарной или движущейся машиной, которая выполняет определенный тип работы, ассоциированной с такой отраслью, как добыча полезных ископаемых, строительство, сельскохозяйственные работы, транспортирование, или любой другой отраслью, известной в данной области техники. Например, рабочая машина 10 может представлять собой землеройную машину, такую как экскаватор, бульдозер, погрузчик, канавокопатель с обратной лопатой, автогрейдер, самосвал, или любую другую землеройную машину. Рабочая машина 10 может включать в себя раму 12, рабочий инструмент 14, одно или больше устройств 30a-c гидравлического привода, соединяющих рабочий инструмент 14 с рамой 12, станцию 16 оператора, источник 18 энергии и, по меньшей мере, одно устройство 20 передвижения.
Рама 12 может включать в себя любой конструкционный модуль, который поддерживает движение рабочей машины 10. Рама 12 может быть выполнена, например, в виде стационарной рамы основания, соединяющей источник 18 энергии с устройством 20 передвижения, подвижного элемента рамы или системы соединений или любой другой рамы, известной в данной области техники.
Множество различных рабочих инструментов 14 могут быть закреплены на одной рабочей машине 10, и ими можно управлять через станцию 16 оператора. Рабочий инструмент 14 может включать в себя любое устройство, используемое для выполнения определенной задачи, такое как, например, ковш, компоновка вилочного захвата, отвал, механическая лопата, рыхлитель, разгрузочная платформа, щетка, снегоочиститель, движущееся устройство, режущее устройство, устройство захвата или любое другое устройство, выполняющее задачи, известные в данной области техники. Рабочий инструмент 14 может быть соединен с рабочей машиной 10 через прямой шарнир, через систему соединения, через один или больше гидравлических цилиндров, через двигатель или любым другим соответствующим образом. Рабочий инструмент 14 может быть выполнен с возможностью шарнирного поворота, вращения, скольжения, раскачки, подъема или перемещения относительно рабочей машины 10 любым образом, как известно в данной области техники.
Станция 16 оператора может быть выполнена с возможностью приема входных сигналов от оператора рабочей машины, которые обозначают желательное движение рабочего инструмента. В частности, станция 16 оператора может включать в себя устройство 22 интерфейса оператора, воплощенное как одноосевой или многоосевой джойстик, расположенный с одной стороны сиденья. Устройство 22 интерфейса оператора может представлять собой контроллер пропорционального типа, выполненный с возможностью установки положения и/или ориентации рабочего инструмента 14 для формирования сигнала положения устройства интерфейса, обозначающего требуемую скорость рабочего инструмента 14. Предполагается, что дополнительные и/или другие устройства интерфейса оператора могут быть включены в станцию 16 оператора, такие как, например, колеса, кнопки, устройства тяги-толкания, переключатели, педали и другие устройства интерфейса оператора, известные в данной области техники.
Источник 18 энергии может быть воплощен в виде двигателя, такого как, например, дизельный двигатель, бензиновый двигатель, двигатель, работающий от газообразного топлива, или двигатель любого другого типа, известный в данной области техники. Предполагается, что источник 18 энергии, в качестве альтернативы, может быть выполнен как другой источник энергии, такой как топливный элемент, устройство - накопитель энергии, электрический или гидравлический двигатель или другой источник энергии, известный в данной области техники.
Устройство 20 привода в движение может включать в себя гусеницы, расположенные с каждой стороны рабочей машины 10 (показана только одна сторона). В качестве альтернативы, устройство 20 привода в движение может включать в себя колеса, ленты или другие устройства привода в движение. Устройство 20 привода в движение может быть управляемым или неуправляемым. Предусматривается, что устройство 20 привода в движение может быть управляемым гидравлически, управляемым механически, управляемым электронным способом или управляемым любым другим соответствующим образом.
Как показано на фиг.2, рабочая машина 10 может включать в себя систему 24 гидравлического управления, имеющую множество гидравлических компонентов, которые взаимодействуют для обеспечения движения рабочего инструмента 14. В частности, система 24 гидравлического управления может включать в себя резервуар 26, содержащий запас жидкости, и источник 28, выполненный с возможностью создания давления жидкости и направления жидкости под давлением в устройство 30a-c гидравлического привода. Система 24 гидравлического управления может также включать в себя подающий клапан 32 для головной части, выпускной клапан 34 для головной части, подающий клапан 36 для штоковой части, выпускной клапан 38 для штоковой части, датчик 40 давления головной части, датчик 42 давления штоковой части и датчик 44 ускорения. Система 24 гидравлического управления может дополнительно включать в себя контроллер 48, сообщающийся с гидравлическими компонентами системы 24 гидравлического управления. Предполагается, что система 24 гидравлического управления может включать в себя дополнительные и/или другие компоненты, такие как, например, аккумуляторы, ограничительные отверстия, обратные клапаны, клапаны сброса давления, подпиточные клапаны, каналы балансирования давления, датчики температуры, датчики положения и другие такие компоненты, известные в данной области техники.
Резервуар 26 может составлять резервуар, выполненный с возможностью содержания запаса жидкости. Жидкость может включать в себя, например, специальное гидравлическое масло, масло для смазки двигателя, масло для смазки трансмиссии или любую другую жидкость, известную в данной области техники. Одна или больше гидравлических систем рабочей машины 10 может отбирать жидкость из и возвращать жидкость в резервуар 26. Также предусматривается, что система 24 гидравлического управления может быть соединена с множеством отдельных резервуаров для жидкости.
Источник 28 может быть выполнен с возможностью формирования потока жидкости под давлением и может включать в себя насос, такой как, например, насос с объемным регулированием, насос с постоянным расходом, или может представлять собой любой другой источник жидкости под давлением, известный в данной области техники. Источник 28 может быть соединен с возможностью привода от источника 18 энергии рабочей машины 10, например, с использованием промежуточного вала 50, ремня (не показан), электрической цепи (не показана) или любым другим соответствующим образом. В качестве альтернативы, источник 28 может быть опосредованно соединен с источником 18 энергии через преобразователь крутящего момента, коробку передач или любым другим способом, известным в данной области техники. Предполагается, что множество источников жидкости под давлением могут быть взаимно соединены для подачи жидкости под давлением в систему 24 гидравлического управления.
Следует отметить, что хотя на фиг.1 показаны три устройства гидравлического привода, обозначенные как 30a, 30b и 30c, с целью упрощения, на гидравлической схеме по фиг.2 представлено только устройство 30с гидравлического привода. Таким образом, хотя все описание системы 24 гидравлического управления будет выполнено со ссылкой только на устройство 30c гидравлического привода, это описание может быть в равной степени применено к устройствам 30а и 30b гидравлического привода.
Устройство 30с гидравлического привода может включать в себя гидравлический цилиндр, который соединяет рабочий инструмент 14 с рамой 12 (см. фиг.1) через прямой шарнир, через систему соединения с устройством 30с гидравлического привода, формирующим элемент в системе соединения, или любым другим соответствующим образом. Предусматривается, что другое устройство гидравлического привода, кроме гидравлического цилиндра, в качестве альтернативы, может быть воплощено в системе 24 гидравлического управления, такое как, например, гидравлический двигатель или устройство привода любого другого типа, известное в данной области техники. Как показано на фиг.2, устройство 30с гидравлического привода может включать в себя трубу 52 и узел 54 поршня, расположенный внутри трубы 52. Одно из трубы 52 и узла 54 поршня может быть шарнирно соединено с рамой 12, в то время как другое из трубы 52 и узла 54 поршня может быть шарнирно соединено с рабочим инструментом 14. Предусматривается, что труба 52 и/или узел 54 поршня, в качестве альтернативы, может быть жестко соединен либо с рамой 12, или с рабочим инструментом 14. Устройство 30с гидравлического привода может включать в себя первую камеру 56 и вторую камеру 58, разделенные поршнем 60. В первую и вторую камеры 56, 58 может избирательно подаваться жидкость под давлением от источника 28, и первая и вторая камеры 56, 58 могут избирательно соединяться с резервуаром 26 для обеспечения перемещения узла 54 поршня внутри трубы 52, в результате чего изменяется эффективная длина устройства 30с гидравлического привода. Удлинение и сокращение устройства 30с гидравлического привода может способствовать движению рабочего инструмента 14.
Узел 54 поршня может включать в себя поршень 60, совмещенный вдоль оси с и расположенный внутри трубы 52, и шток 62 поршня, который может быть соединен с одним из рамы 12 и рабочего инструмента 14 (см. фиг.1). Поршень 60 может включать в себя первую гидравлическую поверхность 64 и вторую гидравлическую поверхность 66, противоположную первой гидравлической поверхности 64. Дисбаланс сил, связанный с приложением давления жидкости к первой и второй гидравлическим поверхностям 64, 66, может привести к движению узла 54 поршня внутри трубы 52. Например, сила, прикладываемая к первой гидравлической поверхности 64, большая, чем сила, прикладываемая ко второй гидравлической поверхности 66, может привести к перемещению узла 54 поршня с увеличением эффективной длины устройства 30с гидравлического привода. Аналогично, когда сила, прикладываемая ко второй гидравлической поверхности 66, больше, чем сила, прикладываемая к первой гидравлической поверхности 64, узел 54 поршня может отводиться внутри трубы 52, уменьшая эффективную длину устройства 30с гидравлического привода. Скорость потока жидкости в первую и вторую камеры 56 и 58 и из них может определять скорость движения устройства 30с гидравлического привода, в то время как давление жидкости, находящейся в контакте с первой и второй гидравлическими поверхностями 64 и 66, может определять силу привода устройства 30с гидравлического привода. Уплотнительный элемент (не показан), такой как уплотнительное кольцо, может быть соединен с поршнем 60 для ограничения потока жидкости между внутренней стенкой трубы 52 и внешней цилиндрической поверхностью поршня 60.
Подающий клапан 32 для головной части может быть расположен между источником 28 и первой камерой 56 и выполнен с возможностью регулирования потока жидкости, подаваемой под давлением в первую камеру 56, в соответствии с командой установки скорости, поступающей из контроллера 48. В частности, подающий клапан 32 для головной части может включать в себя пропорционально подпружиненный механизм клапана с приводом от соленоида и может быть выполнен с возможностью перемещения между первым положением, в котором жидкость может поступать в первую камеру 56, и вторым положением, в котором поток жидкости из первой камеры 56 блокируется. Подающий клапан 32 для головной части может перемещаться в любое положение между первым и вторым положениями, изменяя скорость потока в первую камеру 56, влияя, таким образом, на скорость устройства 30с гидравлического привода. Предполагается, что подающий клапан 32 для головной части, в качестве альтернативы, может быть выполнен с гидравлическим приводом, механическим приводом, пневматическим приводом или с любым другим соответствующим приводом. Кроме того, предполагается, что подающий клапан 32 для головной части может быть выполнен с возможностью выпуска жидкости из первой камеры 56 так, что она протекает через подающий клапан 32 для головной части во время события регенерации, когда давление в первой камере 56 превышает давление, направляемое в подающий клапан 32 для головной части из источника 28. С целью настоящего раскрытия регенерация может включать в себя направление жидкости под давлением из одной из первой и второй камеры 56, 58, из которой осуществляется слив жидкости в заполняющуюся одну из первой и второй камеры 56, 58, как часть общего потока в камеру наполнения.
Выпускной клапан 34 для головной части может быть расположен между первой камерой 56 и резервуаром 26 и выполнен с возможностью регулирования потока жидкости из первой камеры 56 в резервуар 26 в соответствии с командой установки давления, поступающей из контроллера 48. В частности, выпускной клапан 34 для головной части может включать в себя пропорционально подпружиненный механизм клапана с приводом от соленоида и выполнен с возможностью перемещения между первым положением, в котором жидкость может вытекать из первой камеры 56, и вторым положение, в котором жидкость блокирована и не может вытекать из первой камеры 56. Выпускной клапан 34 для головной части может перемещаться в любое положение между первым и вторым положениями для изменения давления жидкости, находящейся в первой камере 56. Предусматривается, что выпускной клапан 34 для головной части, в качестве альтернативы, может быть выполнен с гидравлическим приводом, механическим приводом, пневматическим приводом или с любым другим соответствующим приводом.
Подающий клапан 36 для штоковой части может быть расположен между источником 28 и второй камерой 58 и выполнен с возможностью регулировать поток жидкости под давлением во вторую камеру 58 в соответствии с командой установки скорости из контроллера 48. В частности, подающий клапан 36 для штоковой части может включать в себя пропорционально подпружиненный механизм клапана с приводом от соленоида и выполнен с возможностью перемещения между первым положением, в котором жидкость может протекать во вторую камеру 58, и вторым положением, в котором вытекание жидкости из второй камеры 58 заблокировано. Подающий клапан 36 для штоковой части может перемещаться в любое положение между первым и вторым положениями для изменения скорости потока во вторую камеру 58, влияя, таким образом, на скорость устройства 30с гидравлического привода. Предполагается, что подающий клапан 36 для штоковой части, в качестве альтернативы, может быть выполнен с гидравлическим приводом, механическим приводом, пневматическим приводом или с любым другим соответствующим приводом. Также предполагается, что подающий клапан 36 для штоковой части может быть выполнен с возможностью обеспечения потока жидкости из второй камеры 58 через подающий клапан 36 для штоковой части во время явления регенерации, когда давление во второй камере 58 превышает давление, направляемое в подающий клапан 36 для штоковой части от источника 28.
Выпускной клапан 38 для штоковой части может быть расположен между второй камерой 58 и резервуаром 26 и выполнен с возможностью регулировать поток жидкости из второй камеры 58 в резервуар 26 в соответствии с командой установки давления из контроллера 48. В частности, выпускной клапан 38 для штоковой части может включать в себя пропорционально подпружиненный механизм клапана с приводом от соленоида и выполнен с возможностью перемещения между первым положением, в котором жидкость может вытекать из второй камеры 58, и вторым положением, в котором жидкость заблокирована и не может вытекать из второй камеры 58. Выпускной клапан 38 для штоковой части может перемещаться в любое положение между первым и вторым положениями для изменения давления жидкости во второй камере 58. Предусматривается, что выпускной клапан 38 для штоковой части, в качестве альтернативы, может быть выполнен с гидравлическим приводом, механическим приводом, пневматическим приводом или с любым другим соответствующим приводом.
Подающие и выпускные клапаны 32-38 для головной части и штоковой части могут взаимно сообщаться по жидкости. В частности, подающие клапаны 32, 36 для головной части и штоковой части могут быть соединены параллельно с общим каналом 68 подачи, который продолжается от источника 28. Выпускные клапаны 34, 38 для головной части и штоковой части могут быть соединены параллельно с общим выпускным каналом 70, который ведет в резервуар 26. Подающие и выпускные клапаны 32, 34 для головной части могут быть соединены параллельно с каналом 72 первой камеры для избирательной подачи и выпуска жидкости из первой камеры 56 в соответствии с командой скорости и давления от контроллера 48. Подающий и выпускной клапаны 36, 38 для штоковой части могут быть соединены параллельно с общим каналом 74 второй камеры для избирательной подачи и выпуска жидкости из второй камеры 58 в соответствии с командой установки скорости и давления из контроллера 48.
Датчики 40, 42 давления головной части и штоковой части могут сообщаться по жидкости с первой и второй камерами 56, 58 соответственно и выполнены с возможностью измерения давления жидкости в первой и второй камерах 56, 58. Датчики 40, 42 давления головной и штоковой части могут быть дополнительно выполнены с возможностью генерирования сигналов нагрузки, обозначающих давление в первой и второй камерах 56, 58. Результаты измерения давления, генерируемые датчиками 40, 42 давления головной части и штоковой части, можно сравнивать с измерениями времени, для генерирования динамического результата измерения давления, который обозначает ускорение гидравлического цилиндра 30с.
Датчик 44 ускорения может быть ассоциирован с гидравлическим цилиндром 30с и выполнен с возможностью измерения ускорения движения цилиндра и генерирования соответствующего сигнала ускорения. Предусматривается, что датчик 44 ускорения может быть исключен, если это необходимо, и ускорение гидравлического цилиндра 30с можно определять по измерениям динамического давления, описанным выше. Кроме того, предусматривается, что, когда датчик 44 ускорения используется, измерение динамического давления можно использовать для калибровки датчика 44 ускорения.
Контроллер 48 может быть выполнен на основе одного микропроцессора или множества микропроцессоров, которые включают в себя средство управления работой системы 24 гидравлического управления. Множество коммерчески доступных микропроцессоров могут быть установлены с возможностью выполнения функций контроллера 48. Следует понимать, что контроллер 48 может быть непосредственно воплощен в общем микропроцессоре рабочей машины, который может управлять различными функциями рабочей машины. Контроллер 48 может включать в себя запоминающее устройство, вспомогательное устройство - накопитель, процессор и любые другие компоненты, предназначенные для работы приложения. Различные другие схемы могут быть соединены с контроллером 48, такие как схема подачи питания, схема формирования сигнала, схема привода соленоида и схемы других типов.
Одна или больше карт, относящихся к положению устройства интерфейса, нагрузки привода жидкости, команды установки скорости и команды установки давления для устройства 30с гидравлического привода могут быть сохранены в запоминающем устройстве контроллера 48. Каждая из этих карт может быть выполнена в форме таблиц, графиков и/или уравнений. В одном примере положение устройства интерфейса и команда установки скорости могут формировать координатную ось двумерной таблицы для управления подающими клапанами 32, 36 для головной части и штоковой части. Команда установки скорости и положение элемента клапана для соответствующего клапана подачи могут быть сопоставлены с другой отдельной двумерной картой или, вместе с положением устройства интерфейса, в виде 3-мерной карты. Также предусматривается, что сигнал положения устройства интерфейса может быть непосредственно сопоставлен с положением элемента клапана в одной двумерной карте. В том же примере две оси другой двумерной карты в запоминающем устройстве контроллера 48 могут сопоставлять информацию нагрузки и команду давления для управления выпускными клапанами 34, 38 для головной части и штоковой части. Контроллер 48 может быть выполнен так, что для оператора обеспечивается возможность непосредственной модификации этих карт и/или выбора определенных карт из доступных карт сопоставления, сохраненных в запоминающем устройстве контроллера 48, для управления устройством 30с гидравлического привода. Предусматривается, что карты можно выбирать на основе режимов работы, выполняемых рабочей машиной, таких как, например, режим движения с торможением, режим движения с превышением скорости, переходный режим и другие режимы работы такой машины.
Режим движения с торможением может включать в себя операции, в которых устройство 30с гидравлического привода оказывает сопротивление внешней генерируемой силе. Режим движения с превышением скорости может включать в себя операции, при которых нагрузка рабочей машины 10 естественно способствует движению устройства 30с гидравлического привода в требуемом направлении. Переходный режим может включать в себя работу устройства 30с гидравлического привода во время перехода между режимом движения с торможением и режимом движения с превышением скорости. Во время любого режима работы могут работать только два из подающих и выпускных клапанов 32-38 для головной части и штоковой части, в то время как остальные два находятся в положениях блокирования потока. Например, когда устройство 30с гидравлического привода расширяется для перемещения части стрелы рамы 12 (см. фиг.1) вверх, преодолевая силу тяжести (режим движения с торможением), подающий клапан 32 для головной части (см. фиг.2) может перемещаться в направлении первого положения или положения пропускания потока для заполнения первой камеры 56 жидкостью под давлением. Одновременно выпускной клапан 38 штоковой части может перемещаться в направлении положения пропускания потока, обеспечивая выпуск жидкости из второй камеры 58 в резервуар 26. В этой ситуации как выпускной клапан 34 для головной части, так и подающий клапан 36 для штоковой части могут находиться во втором положении или положении блокирования потока, предотвращая нежелательное движение устройства 30с гидравлического привода. Аналогично, когда устройство 30с гидравлического привода сокращается для передвижения части стрелы рамы 12 (см. фиг.1) вниз под действием силы тяжести (режим с превышением скорости), выпускной клапан 34 головной части (см. фиг.2) может перемещаться в первое положение или положение пропускания жидкости для выпуска жидкости под давлением из первой камеры 56. Одновременно подающий клапан 36 штоковой части может перемещаться в направлении пропускания потока для заполнения второй камеры 58 жидкостью под давлением. В этой ситуации как подающий клапан 32 для головной части, так и выпускной клапан 38 для штоковой части могут находиться во втором положении или положении блокирования жидкости для предотвращения нежелательного движения устройства 30с гидравлического привода.
Контроллер 48 может быть выполнен с возможностью приема входных команд из устройства 22 интерфейса оператора и от датчиков 40, 42 давления головной части и штоковой части и вырабатывать команды для выполнения операций подающими и выпускными клапанами 32-38 для головной части и штоковой части в соответствии с поступившей входной командой и картами взаимозависимости, описанными выше. В частности, контроллер 48 может сообщаться по жидкости с подающими и выпускными клапанами 32-38 для головной части и для штоковой части устройства 30с гидравлического привода через линии 80, 82, 84, и 86 сообщения соответственно; используя устройство 22 интерфейса оператора через линию 88 сообщения; и с датчиками 40, 42 давления головной части и штоковой части через линии 90 и 92 сообщения соответственно. Контроллер 48 может принимать сигнал положения устройства интерфейса от устройства 22 интерфейса оператора и сигналы нагрузки устройства гидравлического привода от датчиков 40, 42 давления головной части и штоковой части и может обращаться к выбранным и/или модифицированным картам взаимозависимости, сохраненным в запоминающем устройстве контроллера 48, для определения значений команды установки скорости и давления. Команды установки скорости могут обеспечивать избирательное заполнение соответствующей камеры подающими клапанами 32 и 36 для головной части и штоковой части со скоростью потока, которая обеспечивает требуемую скорость рабочего инструмента. Команды установки давления могут обеспечивать избирательный выпуск жидкости из первой и второй камер 56, 58 с помощью выпускных клапанов 34 и 38 для головной части и штоковой части со скоростью потока, в результате которой образуется требуемое давление в соответствующей выпускной камере.
Контроллер 48 может быть выполнен с возможностью влияния на движение элемента клапана подающих и выпускных клапанов 32-38 для головной части и штоковой части в соответствии с ускорением гидравлического цилиндра 30с. В частности, контроллер 48 может сообщаться с датчиком 44 ускорения через линию 94 сообщения и может быть выполнен с возможностью приема сигнала ускорения от датчика 44 ускорения. Контроллер 48 может быть выполнен с возможностью модифицирования команды скорости и/или давления в соответствии с сигналом ускорения. Взаимосвязь между командой скорости и/или давления и сигналом ускорения может содержаться в одной или больше таблицах, графиках или уравнениях, сохраненных в запоминающем устройстве контроллера 48.
Контроллер 48 также может быть выполнен с возможностью избирательного осуществления регенерирования. В частности, контроллер 48 может принимать сигналы нагрузки от датчиков 40 и 42 давления и определять, возможно ли регенерирование. Например, если устройство 30с гидравлического привода сокращается и давление жидкости, вытекающей из второй камеры 58, превышает давление жидкости от источника 28, контроллер 48 может определять, что, по меньшей мере, часть жидкости из второй камеры 58 может быть перенаправлена в первую камеру 56. В этой ситуации требуемый выход источника 28 может быть ниже, чем если бы регенерация не была бы доступной, и, таким образом, источник 28 может работать с уменьшенным уровнем потребления энергии.
Контроллер 48 может регулировать степень регенерации и выход источника 28 на основе входной команды оператора. В частности, отношение регенерируемой жидкости к жидкости от источника 28, протекающей в камеру наполнения, может быть основано на положении привода входного устройства 22 оператора. Взаимное соответствие между положением устройства интерфейса оператора и процентом допустимого регенерируемого потока может содержаться в таблице, графике или может определяться по уравнению, сохраненному в запоминающем устройстве контроллера 48. Источник 28 затем во время работы может генерировать скорость потока жидкости под давлением, требуемую для перемещения устройства 30с гидравлического привода с требуемой скоростью, минус количество жидкости, которое регенерируется из второй камеры 58. Если регенерирование невозможно, источник 28 может работать так, что будет формироваться полная скорость потока жидкости под давлением, требуемая для перемещения гидравлического цилиндра 30с с требуемой скоростью.
На фиг.3 и 4 иллюстрируются примерные способы управления работой системы 24 гидравлического управления. Фиг.3 и 4 будут описаны в следующем разделе для дополнительной иллюстрации раскрытой системы и ее работы.
Промышленная применимость
Раскрытая система гидравлического управления может применяться в любой рабочей машине, которая включает в себя устройство гидравлического привода, в которой требуется обеспечить прогнозируемость скорости при переменных нагрузках и в разных режимах работы. Раскрытая система гидравлического управления может улучшить управление оператора путем сопоставления нагрузки устройства гидравлического привода и ускорения со скоростью и/или давлением, задаваемыми в виде команды для клапанов, связанных с устройством гидравлического привода. Ниже поясняется работа системы 24 гидравлического управления.
Во время выполнения операций рабочей машины 10 оператор рабочей машины может манипулировать устройством 22 интерфейса оператора для приведения в движение рабочего инструмента 14. Положение привода устройства 22 интерфейса оператора может быть сопоставлено с ожидаемой или требуемой для оператора скоростью инструмента 14. Устройство 22 интерфейса оператора может генерировать сигнал положения, обозначающий ожидаемую или требуемую для оператора скорость, во время выполнения оператором манипуляций, и передавать этот сигнал положения в контроллер 48.
Контроллер 48 может принимать различные входные команды во время работы гидравлического цилиндра 30с. Как показано в блок-схеме последовательности операций, представленной на фиг.3, контроллер 48 может принимать сигнал положения устройства интерфейса оператора (этап 100), принимать сигнал нагрузки от датчиков 40, 42 давления головной части и штоковой части (этап 110) и принимать сигналы, обозначающие измеренное и/или определенное ускорение гидравлического цилиндра 30с (этап 120). По сигналам нагрузки контроллер 48 может определять величину нагрузки на гидравлический цилиндр 30с. Величина нагрузки может быть рассчитана по стандартным уравнениям, которые сопоставляют измеренные значения давления с площадями приложения силы первой и второй гидравлических поверхностей 64 и 66. Кроме того, режим работы (например, режим движения с торможением, режим с превышением скорости движения или переходный режим) может быть определен путем сравнения измеренных значений давления с набором заданных пороговых значений давления. Например, если давление в первой камере 56 гидравлического цилиндра 30с выше заданного значения и давление во второй камере 58 ниже заданного значения, контроллер 48 может определить, что гидравлический цилиндр 30с работает в режиме движения с торможением. Аналогично, если давление в первой камере 56 гидравлического цилиндра 30с ниже заданного значения и давление во второй камере 58 выше заданного значения, контроллер 48 может определить, что гидравлический цилиндр 30с работает в режиме превышения скорости движения. Если давление в первой камере 56 гидравлического цилиндра 30с ниже заданного значения и начинает уменьшаться, контроллер 48 может определить, что гидравлический цилиндр 30с входит в переходный режим между режимом движения с торможением и режимом движения с превышением скорости движения. Аналогично, если давление в первой камере 56 гидравлического цилиндра 30с ниже заданного значения и начинает увеличиваться, контроллер 48 может определить, что гидравлический цилиндр 30с входит в переходный режим между режимом движения с превышением скорости и режимом движения с торможением.
При работе в режиме движения с торможением или в режиме движения с превышением скорости контроллер 48 может устанавливать положение элемента клапана выпускного клапана для обеспечения требуемого давления в одной из первой и второй камер 56, 58, из которой происходит выпуск жидкости. Требуемое давление и соответствующее положение механизма клапана могут быть основаны на измеренном состоянии нагрузки гидравлического цилиндра 30с и определены с использованием справочных таблиц, графиков и/или уравнений, сохраненных в запоминающем устройстве контроллера 48 (этап 130). Положение элемента клапана между положениями пропускания потока и блокирования потока может непрерывно отслеживаться в соответствии с сигналами нагрузки, принимаемыми от соответствующего одного из датчиков 40, 42 давления головной части и штоковой части, для генерирования требуемого давления в камере, из которой производят выпуск жидкости.
Кроме того, во время работы гидравлического цилиндра 30с в режиме движения с торможением или в режиме движения с превышением скорости контроллер 48 может сравнивать сигнал требуемой скорости, поступающий от устройства 22 интерфейса оператора, с картой взаимозависимости, сохраненной в запоминающем устройстве контроллера 48, для определения соответствующей команды установки скорости для работающих одного из подающих клапанов 32, 36 для головной части и штоковой части. Контроллер 48 может затем вырабатывать команду для перемещения элемента клапана соответствующего одного из подающих клапанов 32 и 36 для головной части и штоковой части, для регулирования скорости потока жидкости под давлением в соответствующую одну из первой и второй камер 56, 58, обеспечивая, таким образом, по, существу, соответствие движения устройства 30с гидравлического привода ожидаемой или требуемой для оператора скорости (этап 140).
Контроллер 48 может учитывать ускорение устройства 30с гидравлического привода. В частности, контроллер 48 может модифицировать соответствующие команды положения элемента клапана соответствующих подающих и выпускных клапанов в соответствии с информацией измеряемого ускорения от датчика 44 ускорения или в соответствии с ускорением, определенным по результатам измерений динамического давления (этап 150). Как отмечено выше, величина модификации может быть определена при обращении к справочной таблице или графику или путем расчета с использованием одного или больше уравнений таким образом, что, когда достигается устойчивое состояние, скорость устройства 30с гидравлического привода будет, по существу, соответствовать требуемой скорости и давление в камере, из которой выполняется выпуск жидкости, будет установлено равным требуемому значению.
Контроллер 48 может регулировать регенерирование во время работы в режиме движения с превышением скорости в соответствии с входной командой оператора. В частности, контроллер 48 может вначале определять, возможно ли регенерирование (этап 160), на основе вывода о том, что устройство 30с гидравлического привода в настоящее время работает в режиме движения с превышением скорости и что давление в одной из первой и второй камер 56, 58, из которой осуществляется выпуск жидкости, превышает заданное значение. Если регенерирование возможно, контроллер 48 может определить процент общего потока в заполняемую камеру, который может быть регенерирован из камеры, из которой осуществляют выпуск жидкости (этап 170). Такое определение может быть основано на положении устройства 22 интерфейса оператора и взаимозависимости, сохраненной в запоминающем устройстве контроллера 48.
Выходным потоком источника 28 можно управлять по-другому, в зависимости от разрешенного процента потока регенерирования. В частности, если регенерирование возможно, в источник 28 может быть подана команда на подачу потока жидкости под давлением со скоростью, по существу, равной требуемой скорости потока жидкости в заполняемую камеру минус процент допустимого потока (180) регенерирования. Например, если скорость потока 30 единиц/минуту в первую камеру 56 требуется для выдвижения устройства 30с гидравлического привода с требуемой скоростью и процент допустимого потока регенерирования составляет 10%, источник 28 должен работать таким образом, чтобы формировать скорость потока 27 единиц/минуту. Однако, если регенерирование невозможно (например, если устройство 30с гидравлического привода работает в режиме движения с торможением), источник 28 во время работы должен формировать все 30 единиц/минуту в соответствии с требуемой скоростью (этап 190).
Во время перехода между режимом торможения движения и режимом движения с превышением скорости контроллер 48 может непосредственно регулировать давление как в первой, так и во второй камерах 56 и 58, для сведения к минимуму вероятности кавитации. В частности, контроллер 48 вначале определяет, вошло ли устройство 30с гидравлического привода в переходный режим. Контроллер 48 может определить, что произошел вход в переходный режим, когда давление в одной из заполняемых (обозначена как камера А на блок-схеме последовательности операций по фиг.4) первой и второй камер 56, 58 уменьшается (этап 200). Если контроллер 48 определяет, что давление жидкости в камере А уменьшилось до заданного порогового значения (этап 210), контроллер 48 может поддерживать давление в камере А на пороговом значении и обеспечить возможность увеличения давления в камере (обозначена как камера В на блок-схеме последовательности операций по фиг.4), из которой ранее производился выпуск жидкости (этап 220).
Контроллер 48 может определить, увеличилось ли давление в камере В до второго заданного порогового значения (этап 230), и может изменить давление жидкости в камере А соответственно. В частности, если давление в камере В увеличилось до второго заданного порогового значения, контроллер 48 может поддерживать давление в камере В и может обеспечить возможность дополнительного уменьшения давления в камере А (этап 240). Контроллер 48 может затем отслеживать давление в камере А и определять, достигло ли давление минимального порогового значения (этап 250). Если давление в камере А достигло минимального порогового значения, контроллер 48 может затем поддерживать давление в камере А на минимальном пороговом значении и может обеспечить возможность повышения давления в камере В выше второго порогового значения на основе сигнала требуемой скорости, поступившего из устройства 22 интерфейса оператора (этап 260).
Поскольку подающими клапанами 32 и 36 для головной части и штоковой части управляют на основе требуемой скорости и выпускными клапанами 34 и 38 для головной части и штоковой части управляют на основе требуемого давления в одной из первой и второй камер 56, 58, из которых осуществляется выпуск жидкости, управление устройствами 30а-с гидравлического привода может быть упрощено. Кроме того, поскольку управление выпускными клапанами 34 и 38 для головной части и для штоковой части выполняют на основе требуемого давления и измеренной нагрузки, устройства 30а-с гидравлического привода могут работать, как было спрогнозировано, в условиях переменной нагрузки и обеспечивать переход без стыков между режимом движения с торможением и режимом движения с превышением скорости.
Для специалиста в данной области техники будет понятно, что различные модификации и изменения могут быть выполнены в отношении раскрытой системы гидравлического управления. Другие варианты воплощения будут понятны для специалиста в данной области техники после рассмотрения описания и из практики применения раскрытой системы гидравлического управления. Предполагается, что описание и примеры следует рассматривать только как примеры, при этом истинный объем обозначен следующей формулой изобретения и ее эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКОЙ СИСТЕМОЙ | 2009 |
|
RU2514291C2 |
| ДОЗИРУЮЩИЙ КЛАПАН СО ВСТРОЕННОЙ ФУНКЦИЕЙ СБРОСА ДАВЛЕНИЯ И ПОДПИТКИ | 2006 |
|
RU2427022C2 |
| СИСТЕМА ГИДРОУПРАВЛЕНИЯ С ИСПОЛЬЗОВАНИЕМ ОПЕРЕЖАЮЩЕГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2520654C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР ПОТОКА С ИНТЕГРАЛЬНЫМ РЕГУЛИРОВАНИЕМ РАСХОДА | 2006 |
|
RU2414630C2 |
| СИСТЕМА ГИДРОУПРАВЛЕНИЯ С КОМПЕНСАЦИЕЙ ГИДРОДИНАМИЧЕСКОЙ СИЛЫ | 2009 |
|
RU2509234C2 |
| УСТРОЙСТВО И СПОСОБ РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2006 |
|
RU2429986C2 |
| Устройство управления гидроприводом затвора шлюза | 1986 |
|
SU1406295A1 |
| КОМБИНИРОВАННЫЕ ЗАКРЫТЫЙ ЗАМКНУТЫЙ ГИДРАВЛИЧЕСКИЙ КОНТУР И СИСТЕМА НАКОПЛЕНИЯ ГИДРАВЛИЧЕСКОЙ ЭНЕРГИИ | 2012 |
|
RU2605514C2 |
| ЭЛЕКТРИЧЕСКАЯ СИЛОВАЯ ПЕРЕДАЧА ДЛЯ РАБОЧЕЙ МАШИНЫ | 2006 |
|
RU2394701C2 |
| СИСТЕМА РЕГЕНЕРАЦИИ, ОБЪЕДИНЕННАЯ С УСТРОЙСТВОМ ОЧИСТКИ И ВОСПЛАМЕНЕНИЯ | 2008 |
|
RU2476694C2 |
Система (24) и способ предназначены для гидравлического управления рабочей машиной (10). Система имеет устройство (30с) гидравлического привода с первой и второй камерами (56, 58), первый и второй дозирующие клапаны (32, 28), имеющие элементы клапана, передвигающиеся для заполнения первой и второй камер и выпуска жидкости из первой и второй камер соответственно, и, по меньшей мере, один датчик (40) жидкости, выполненный с возможностью генерирования сигнала нагрузки, обозначающего нагрузку на устройство гидравлического привода. Система гидравлического управления также имеет устройство (22) интерфейса оператора, перемещающееся для генерирования сигнала требуемой скорости устройства гидравлического привода. Система дополнительно имеет контроллер (48), сообщающийся с первым и вторым дозирующими клапанами, по меньшей мере, одним датчиком жидкости и устройством интерфейса оператора. Контроллер выполнен с возможностью перемещения элемента клапана первого дозирующего клапана в положение, которое основано на сигнале требуемой скорости, и перемещения элемента клапана второго дозирующего клапана в положение, которое основано на сигнале нагрузки и требуемом давлении во второй камере. Технический результат - обеспечение требуемой оператором скорости перемещения рабочего органа машины. 3 н. и 7 з.п. ф-лы, 4 ил.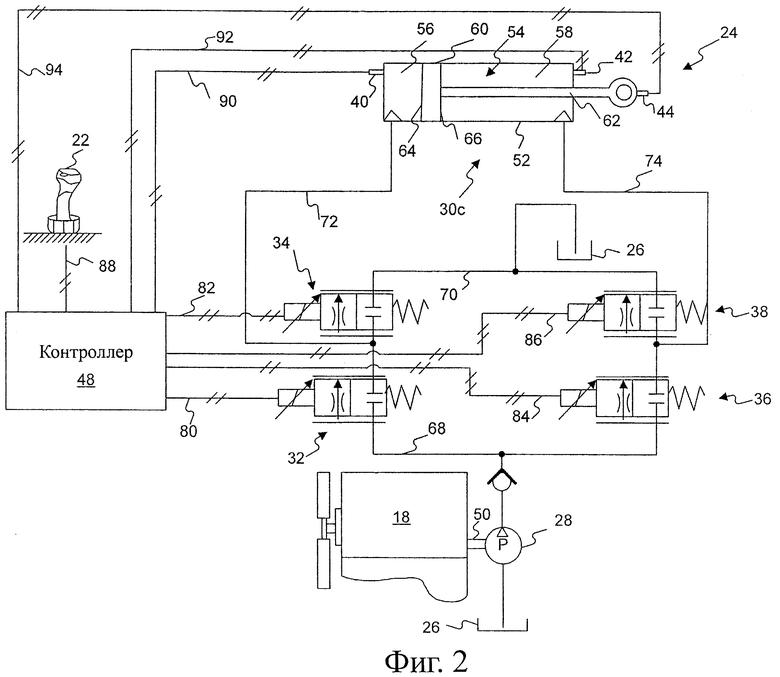
1. Система (24) гидравлического управления, содержащая:
устройство (30с) гидравлического привода, имеющее первую камеру (56) и вторую камеру (58);
первый дозирующий клапан (32), имеющий элемент клапана, перемещающийся между первым положением, в котором жидкость под давлением может поступать в первую камеру, обеспечивая движение устройства гидравлического привода в первом направлении, и вторым положением, в котором подача жидкости под давлением в первую камеру блокируется;
второй дозирующий клапан (38), имеющий элемент клапана, перемещающийся между первым положением, в котором жидкость может вытекать из второй камеры, обеспечивая движение устройства гидравлического привода в первом направлении, и вторым положением, в котором вытекание жидкости из второй камеры блокируется;
по меньшей мере, один датчик (40, 42) жидкости, связанный с устройством гидравлического привода и выполненный с возможностью генерировать сигнал нагрузки, обозначающий нагрузку устройства гидравлического привода;
устройство (22) интерфейса оператора, выполненное с возможностью передвижения для генерирования сигнала требуемой скорости, обозначающего требуемую для оператора скорость устройства гидравлического привода; и
контроллер (48), сообщающийся с первым и вторым дозирующими клапанами, по меньшей мере, одним датчиком жидкости и устройством интерфейса оператора, причем контроллер выполнен с возможностью перемещения элемента клапана первого дозирующего клапана в положение между первым и вторым положениями, на основе сигнала требуемой скорости, и перемещения элемента клапана второго дозирующего клапана в положение между первым и вторым положениями на основе сигнала нагрузки и требуемого давления во второй камере.
2. Система гидравлического управления по п,1, в которой контроллер дополнительно выполнен с возможностью модификации положений элемента клапана первого и второго дозирующих клапанов на основе ускорения устройства гидравлического привода.
3. Система гидравлического управления по п.1, дополнительно включающая в себя источник жидкости (28) под давлением, в которой контроллер дополнительно выполнен с возможностью:
определения, возможна ли регенерация гидравлической энергии на основе сигнала нагрузки;
осуществления регенерации с величиной, основанной на положении устройства интерфейса оператора; и
регулирования выхода источника на основе величины регенерации и сигнала требуемой скорости.
4. Система гидравлического управления по п.1, в которой:
по меньшей мере, один датчик жидкости представляет собой первый датчик (40) давления, соединенный с первой камерой;
система гидравлического управления дополнительно включает в себя второй датчик (42) давления, соединенный со второй камерой; и
контроллер дополнительно выполнен с возможностью осуществления стратегии перехода, когда давление в первой камере понижается ниже заданного значения.
5. Система гидравлического управления по п.4, в которой стратегия перехода включает в себя:
обеспечивают возможность роста давления во второй камере на основе сигнала нагрузки после того, как давление в первой камере достигает заданного значения;
поддерживают давление в первой камере на уровне заданного значения до тех пор, пока давление во второй камере не достигнет второго заданного значения;
обеспечивают возможность падения давления в первой камере ниже заданного значения после того, как давление во второй камере достигнет второго заданного значения;
поддерживают давление во второй камере на уровне второго заданного значения, до тех пор, пока давление в первой камере не достигнет минимального заданного значения; и
обеспечивают возможность превышения давления во второй камере второго заданного значения на основе сигнала нагрузки после того, как давление в первой камере достигнет минимального заданного значения.
6. Способ работы системы (24) гидравлического управления, содержащий:
дозируют подачу жидкости под давлением в первую камеру (56) устройства (30с) гидравлического привода для обеспечения возможности движения устройства гидравлического привода в первом направлении;
дозируют выпуск жидкости из второй камеры (58) устройства гидравлического привода для обеспечения возможности движения устройства гидравлического привода в первом направлении;
измеряют нагрузку, воздействующую на устройство гидравлического привода, и генерируют сигнал нагрузки, обозначающий эту нагрузку;
принимают сигнал требуемой скорости, обозначающий требуемую для оператора скорость устройства гидравлического привода;
дозируют подачу жидкости в первую камеру на основе сигнала требуемой скорости; и
дозируют выпуск жидкости из второй камеры на основе сигнала нагрузки и требуемого давления во второй камере.
7. Способ по п.6, дополнительно включающий в себя:
определяют, возможно ли регенерирование гидравлической энергии на основе сигнала нагрузки;
осуществляют регенерирование с величиной, которая основана на сигнале требуемой скорости; и
регулируют выход источника (28) жидкости под давлением на основе величины регенерирования и сигнала требуемой скорости.
8. Способ по п.6, в котором измерение нагрузки включает в себя: измеряют давление в первой камере и давление во второй камере, и способ дополнительно включает в себя: осуществляют стратегию перехода, когда давление в первой камере понижается ниже заданного значения.
9. Способ по п.8, в котором стратегия перехода включает в себя:
обеспечивают возможность повышения давления во второй камере на основе сигнала нагрузки после того, как давление в первой камере достигнет заданного значения;
поддерживают давление в первой камере на заданном значении до тех пор, пока давление во второй камере не достигнет второго заданного значения;
обеспечивают возможность понижения давления в первой камере ниже заданного значения после того, как давление во второй камере достигнет второго заданного значения;
поддерживают давление во второй камере на втором заданном значении до тех пор, пока давление в первой камере не достигнет минимального заданного значения; и
обеспечивают возможность превышения давления во второй камере второго заданного значения на основе сигнала нагрузки после того, как давление в первой камере достигнет минимального заданного значения.
10. Рабочая машина (10), содержащая:
источник (18) энергии;
рабочий инструмент (14); и
систему (24) гидравлического управления по любому из пп.1-5, функционально соединенную с источником энергии и выполненную с возможностью влияния на движение рабочего инструмента.
| US 20030121408 A1, 03.07.2003 | |||
| US 2005051025 A1, 10.03.2005 | |||
| СПОСОБ ПРОИЗВОДСТВА СКОРЦОНЕРНО-РЖАНОГО НАПИТКА | 2009 |
|
RU2406363C1 |
| УСТРОЙСТВО ПОВЫШЕНИЯ ПЛАВНОСТИ ХОДА СОЧЛЕНЕННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2252171C2 |
| Гидравлический (пневматический) привод | 1987 |
|
SU1536089A2 |

