Область техники, к которой относится изобретение
Настоящее изобретение относится в общем случае к беспроводной связи и, в частности, касается способов обнаружения сигналов в системе беспроводной связи.
Уровень техники
Системы беспроводной связи стали главным средством, с помощью которого множество людей по всему миру связываются друг с другом. Это произошло в основном благодаря тому обстоятельству, что последние достижения в технологии беспроводной связи значительно улучшили возможности указанных систем для передачи данных, относящихся к речи, видеоданных, пакетных данных, широковещательной передачи, передачи сообщений и предоставлении других услуг, используемых в связи. В частности, что касается систем связи с множеством входов и множеством выходов (MIMO), то в них уделяется повышенное внимание возможностям повышения пропускной способности систем беспроводной связи посредством использования множества антенн для одновременной передачи и приема данных. С использованием системы связи MIMO данные можно разделить на множество потоков, которые можно посылать и принимать одновременно для увеличения пропускной способности системы без значительного расширения используемого спектра или существенного повышения мощности.
В типовых системах связи MIMO данные передаются путем их разделения на потоки, группировки битов в каждом потоке, отображения каждой группы битов на точки созвездия и последующей передачи потоков через множество передающих антенн в виде модулированных несущих сигналов на основе точек созвездия, отображенных для каждого потока. После передачи данные проходят через действующий канал MIMO, после чего результирующие пространственные потоки принимаются в приемнике множеством антенн. Затем стандартные приемники MIMO используют различные способы обнаружения сигнала для получения данных из потоков, принятых приемными антеннами. Один такой способ, а именно обнаружение результатов мягкого решения по методу максимального правдоподобия (SOMLD), позволяет получить ожидаемое значение обнаруженного переданного бита, а также оценить правдоподобие его ожидаемого значения. Стандартные способы SOMLD требуют выполнение цикла по всем точкам созвездия, используемым передатчиком, для каждого переданного потока и определения методики расстояния для каждой точки созвездия с целью оценки правдоподобия каждого бита в потоках. Однако для определения оптимальных методик расстояния в стандартном алгоритме SOMLD потребуется дополнительное выполнение цикла по всем точкам созвездия для всех других потоков, что потребует выполнение циклов по всем возможным комбинациям точек созвездия для всех потоков. Вычислительная сложность этой процедуры растет по экспоненциальному закону, что приводит к неприемлемым затратам для многих приложений, включая приложения, которые могли бы получить преимущества от использования обнаружения результатов мягкого решения. Таким образом, в данной области техники существует потребность в несложных способах, которые смогут обеспечить эффективность обнаружения по методу максимального правдоподобия (MLD) или эффективность по методу квазимаксимального правдоподобия (квази-MLD) при обнаружении результатов жесткого решения или которые смогут обеспечить эффективность SOMLD или эффективность квази-SOMLD при обнаружении результирующих сигналов мягкого решения в системах связи MIMO.
Раскрытие изобретения
Далее в упрощенном виде представлена сущность раскрытых вариантов изобретения для обеспечения их базового понимания. Содержание этого раздела не дает расширенного представления обо всех возможных вариантах изобретения и не предполагает ни идентификацию его ключевых или критических элементов, ни ограничения объема указанных вариантов. Единственной целью этого раздела является представление некоторых концепций раскрытых вариантов в упрощенной форме в качестве введения к более подробному описанию изобретения, приведенному ниже.
Описанные варианты изобретения разрешают вышеупомянутые проблемы, предлагая несложные способы обнаружения по методу максимального правдоподобия в системах связи MIMO, которые выдают метрики расстояния, близкие к оптимальным, для создания результатов мягкого решения. В частности, описанные здесь системы и методики позволяют организовать циклы для всех точек созвездия для одного пространственного потока с целью получения метрик расстояния для каждого потока. Вместо дополнительной организации циклов для всех других потоков в рамках вычислений для конкретного потока значения для других потоков, которые порождают метрики расстояния, близкие к оптимальным, можно оценить, используя канальную матрицу MIMO и субоптимальный алгоритм MIMO, такой как описанное здесь обнаружение на основе списка для каждого потока (PSLD), обнаружение на основе редуцированной решетки (LRD) или алгоритм направленного поиска по М точкам. Повышение эффективности можно получить путем предварительной обработки канальной матрицы MIMO и/или использования улучшенных метрик (EMU), как это описано далее.
Согласно одному варианту здесь описан способ создания результирующих значений мягкого решения для набора переданных пространственных потоков в системе связи с множеством входов и множеством выходов. Способ может содержать выполнение цикла по множеству точек созвездия для соответствующих переданных пространственных потоков с целью оценки значений для других переданных потоков на основе, по меньшей мере частично, субоптимального алгоритма MIMO. Способ может дополнительно содержать определение набора метрик расстояния в виде значений множества точек созвездия для соответствующих переданных пространственных потоков. Вдобавок, способ может содержать создание результатов мягкого решения для соответствующих переданных потоков на основе, по меньшей мере частично, набора метрик расстояния.
Другой вариант относится к устройству беспроводной связи, которое может включать в себя память, хранящую данные, относящиеся к набору принятых потоков, и матрицу, соответствующую каналу, через который передавался набор переданных потоков, соответствующих набору принятых потоков. Устройство беспроводной связи может дополнительно содержать процессор, сконфигурированный для выполнения цикла по одной или нескольким точкам созвездия для соответствующих переданных потоков с целью определения оценочных значений для других переданных потоков и соответствующих метрик расстояния с использованием указанной матрицы и субоптимального алгоритма MIMO и создания результатов мягкого решения для соответствующих переданных потоков в виде логарифмических отношений правдоподобия определенных метрик расстояния.
Еще один вариант относится к устройству, которое обеспечивает несложное обнаружение квазимягких результатов по методу максимального правдоподобия для последовательности переданных потоков. Устройство может содержать средство для выполнения цикла по набору точек созвездия для соответствующих переданных потоков с целью оценки других элементов с использованием субоптимального алгоритма MIMO. Вдобавок, устройство может содержать средство для определения метрик расстояния для соответствующих переданных потоков по набору точек созвездия. Кроме того, устройство может содержать средство для получения результатов мягкого решения для соответствующих битов в переданных потоках на основе определенных метрик расстояния.
Следующий вариант относится к считываемому компьютером носителю, имеющему хранящиеся на нем считываемые компьютером инструкции для создания значений мягкого решения для набора переданных потоков в системе беспроводной связи. Инструкции могут содержать итеративное использование канальной матрицы и субоптимального алгоритма MIMO на наборе возможных точек созвездия для соответствующих переданных потоков в наборе переданных потоков с целью оценки соответствующих значений для других переданных потоков в наборе переданных потоков и определения соответствующих метрик расстояния. Инструкции могут дополнительно включать в себя получение результатов мягкого решения для соответствующих битов в наборе переданных потоков на основе метрик расстояния.
Согласно другому варианту здесь описан процессор, который может исполнять считываемые компьютером для несложного обнаружения результатов мягкого решения в приемнике MIMO. Эти инструкции могут включать в себя выполнение циклов по одной или нескольким точкам созвездия для соответствующих переданных потоков с целью оценки других элементов и определения соответствующих метрик расстояния с использованием субоптимального алгоритма MIMO. Вдобавок, инструкции могут содержать получение результатов мягкого решения путем вычисления логарифмических отношений для соответствующих битов в переданных потоках на основе метрик расстояния.
Дополнительный вариант относится к способу создания результирующих значений мягкого решения для набора переданных пространственных потоков в системе связи. Способ может содержать выполнение цикла по множеству точек созвездия для соответствующих переданных пространственных потоков с целью оценки значений для других переданных потоков на основе, по меньшей мере частично, алгоритма с одним входом и одним выходом (SISO). Способ может дополнительно содержать определение набора метрик расстояния в виде значений множества точек созвездия для соответствующих переданных пространственных потоков. Вдобавок, способ может содержать создание результатов мягкого решения для соответствующих переданных потоков на основе, по меньшей мере частично, набора метрик расстояния.
Для достижения вышеизложенных и родственных целей один или несколько вариантов изобретения содержат признаки, которые подробно описаны далее и конкретно раскрыты в формуле изобретения. В последующем описании и прилагаемых чертежах подробно изложены некоторые иллюстративные варианты раскрытых вариантов изобретения. Однако эти варианты указывают лишь несколько из разнообразных возможных путей использования принципов построения различных вариантов изобретения. Кроме того, предполагается, что раскрытые варианты включают все указанные варианты и их эквиваленты.
Краткое описание чертежей
Фиг.1 - система беспроводной связи с множественным доступом согласно различным изложенным здесь вариантам;
фиг.2 - блок-схема системы беспроводной связи с множеством входов и множеством выходов, которая облегает передачу и прием пространственных потоков данных согласно различным описанным здесь вариантам;
фиг.3 - примерная компонента для обнаружения сигнала, которую можно использовать в системе связи MIMO согласно различным вариантам;
фиг.4 - блок-схема методики несложного обнаружения результатов мягкого решения по методу максимального правдоподобия (квази-SOMLD) в системе связи MIMO;
фиг.5 - блок-схема методики для квази-SOMLD в системе связи MIMO с использованием алгоритма обнаружения на основе списка для каждого потока;
фиг.6 - блок-схема методики для квази-SOMLD в системе связи MIMO с использованием алгоритма обнаружения на основе редуцированной решетки (LRD);
фиг.7 - блок-схема методики для квази-SOMLD в системе связи MIMO с использованием алгоритма направленного поиска по М точкам;
фиг.8 - блок-схема методики для несложного обнаружения результатов мягкого решения в системе связи MIMO с использованием улучшенных метрик;
фиг.9 - блок-схема, иллюстрирующая примерную систему беспроводной связи, в которой могут функционировать один или несколько описанных здесь вариантов изобретения;
фиг.10 - блок-схема системы, которая координирует модуляцию и передачу пространственных потоков данных согласно различным вариантам;
фиг.11 - блок-схема системы, которая координирует прием и обнаружение пространственных потоков данных согласно различным вариантам;
фиг.12 - блок-схема устройства, обеспечивающего обнаружение квазимягких результатов по методу максимального правдоподобия согласно различным вариантам;
фиг.13 - блок-схема устройства, обеспечивающего обнаружение квазимягких результатов по методу максимального правдоподобия посредством предварительной обработки канальной матрицы MIMO и использования субоптимальных алгоритмов MIMO согласно различным вариантам;
фиг.14 - блок-схема устройства, обеспечивающего обнаружение квазимягких результатов по методу максимального правдоподобия с использованием улучшенных метрик согласно различным вариантам.
Осуществление изобретения
Далее со ссылками на прилагаемые чертежи описываются различные варианты изобретения, в которых одинаковые ссылочные позиции относятся к одинаковым или соответствующим элементам на всех чертежах. В последующем описании в целях разъяснения изложены многочисленные конкретные детали, чтобы обеспечить всестороннее представление об одном или нескольких вариантах. Однако очевидно, что такой вариант (варианты) может быть практически воплощен без этих конкретных деталей. В других случаях хорошо известные структуры и устройства показаны в виде блок-схем с целью облегчения описания одного или нескольких вариантов.
Подразумевается, что используемые в этой заявке термины «компонента», «модуль», «система» и т.п. относятся к объекту, имеющему отношение к компьютеру, любым аппаратным средствам, программно-аппаратным средствам, комбинации аппаратных и программных средств, программным средствам или программным средствам, находящимся в процессе исполнения. Например, компонентой может быть не только: процесс, выполняющийся в процессоре; процессор; объект; исполняемый файл; поток управления; программа и/или компьютер. Компонентой, к примеру, может быть как приложение, выполняющееся на компьютерном устройстве, так и само это устройство. Одна или несколько компонент могут находиться в процессе и/или цепочке вычисления, причем компонента может быть локализована на одном компьютере и/или распространена между двумя или более компьютерами. Вдобавок, эти компоненты могут исполняться с различных считываемых компьютером носителей, имеющих хранящиеся на них различные структуры данных. Компоненты могут осуществлять связь друг с другом через локальные и/или удаленные процессы, например, с помощью сигналов, имеющих один или несколько пакетов данных (например, данные из одной компоненты, взаимодействующей с другой компонентой в локальной системе, распределенной системе и/или через сеть, такую как Интернет, с другими системами с помощью упомянутых сигналов).
Кроме того, различные варианты изобретения описаны здесь в соединении с беспроводным терминалом и/или базовой станцией. Беспроводной терминал может относиться к устройству, обеспечивающему речевую связь и/или передачу данных пользователю и обратно. Беспроводный терминал может быть соединен с вычислительным устройством, таким как ноутбук или настольный компьютер, либо может представлять собой автономное устройство, такое как персональный цифровой помощник (PDA). Беспроводный терминал может также называться системой, абонентским блоком, абонентской станцией, мобильной станцией, мобильным объектом, удаленной станцией, точкой доступа, удаленным терминалом, терминалом доступа, пользовательским терминалом, пользовательским агентом, пользовательским устройством или пользовательским оборудованием. Беспроводным терминалом может быть абонентская станция, беспроводное устройство, сотовый телефон, телефон PCS (стандарт для персональных видеоконференций), беспроводной телефон, телефон Протокола инициирования сеанса (SIP), станцию беспроводной местной линии (WLL), персональный цифровой помощник (PDA), карманное устройство с возможностями беспроводного соединения или другое обрабатывающее устройство, подсоединенное к беспроводному модему. Базовая станция (например, точка доступа) может относиться к устройству в сети доступа, которое осуществляет связь с беспроводными терминалами через радиоинтерфейс посредством одного или нескольких секторов. Базовая станция может выполнять функцию маршрутизатора между беспроводным терминалом и остальной сетью доступа, которая может включать в себя сеть протокола Интернет (IP), путем преобразования получаемых через радиоинтерфейс кадров в IP пакеты. Базовая станция также координирует управление атрибутами для радиоинтерфейса.
Кроме того, описанные здесь различные варианты или признаки изобретения могут быть реализованы в виде способа, устройства или изделия с использованием стандартных способов программирования и/или проектирования. Подразумевается, что используемый здесь термин «изделие» распространяется на компьютерную программу, доступную с любого считываемого компьютером устройства, носителя или среды. Например, считываемая компьютером среда может включать в себя не только: магнитные запоминающие устройства (например, жесткий диск, гибкий диск, магнитные полосы …), оптические диски (например, компакт-диск (CD), цифровой универсальный диск (DVD) …), смарт-карты и устройства флэш-памяти (например, карта, стик, флэш-память-ключ).
Различные варианты изобретения будут представлены ниже с точки зрения систем, которые могут включать в себя несколько устройств, компонент, модулей и т.п. Следует учесть, что различные системы могут включать в себя дополнительные устройства, компоненты, модули и т.п., и/или могут не включать все устройства, компоненты, модули и т.д., обсуждаемые в связи с прилагаемыми чертежами. Также может быть использована комбинация из указанных подходов.
Вдобавок, хотя различные варианты изобретения представлены здесь в общем случае в контексте систем беспроводной связи, должно быть ясно, что описанные здесь системы и методики можно использовать вместе с любой подходящей системой и/или приложением, которое может использовать проводную и/или беспроводную связь. Например, различные описанные здесь варианты изобретения могут быть использованы в системах MIMO, где применяется стандарт IEEE 802.11n или аналогичный стандарт, приложения многопользовательского обнаружения, многорежимные приложения для волоконной и волоконно-оптической связи, системы связи Ethernet и/или приложения, которые могут работать со скоростью 1G, 10G или другой подходящей скоростью, и/или любые другие подходящие системы или приложения для связи. Кроме того, следует иметь в виду, что все указанные системы и приложения, разумеется, не выходят за рамки объема прилагаемой формулы изобретения.
Обратимся теперь к чертежам, где на фиг.1 показана система беспроводной связи с множественным доступом согласно различным вариантам изобретения. В одном примере точка 100 доступа (AP) включает в себя множество антенных групп. Как показано на фиг.1, одна антенная группа может включать в себя антенны 104 и 106, другая может включать в себя антенны 108 и 110, а следующая - антенны 112 и 114. Хотя на фиг.1 для каждой антенной группы показаны только две антенны, следует учесть, что в каждой из таких антенных группы можно использовать больше или меньше антенн. На другом примере на связи с антеннами 112 и 114 может находиться терминал 116 доступа (АТ), где антенны 112 и 114 передают информацию на терминал 116 доступа по прямой линии 120 связи, а принимают информацию от терминала 116 доступа по обратной линии 118 связи. Вдобавок и/или как альтернативный вариант терминал 122 доступа может быть связан с антеннами 104 и 106, где антенны 104 и 106 передают информацию на терминал 122 доступа по прямой линии 126 связи, а принимают информацию от терминала 122 доступа по обратной линии 124 связи. Согласно одному варианту терминалы 116 и 122 доступа могут иметь множество антенн, с помощью которых между терминалами 116 и 122 доступа и точкой 100 доступа может быть установлена связь с множеством входов и множеством выходов (MIMO) через соответствующие прямые линии 120 и 126 связи и/или обратные линии 118 и 124 связи. Кроме того, в дуплексной системе с частотным разделением каналов (FDD) в линиях 118, 120, 124 и 126 для осуществления связи могут использоваться разные частоты. Например, в прямой линии 120 может использоваться частота, отличная от используемой в обратной линии 118 связи.
Каждую группу антенн и/или зону, в которой они должны обеспечивать связь, можно назвать сектором точки доступа. Согласно одному варианту группы антенн могут быть предназначены для связи с терминалами доступа в секторе зон, покрываемых точкой 100 доступа. При осуществлении связи по прямым линиям 120 и 126 передающие антенны точки 100 доступа могут использовать формирование пучка для улучшения отношения сигнал - шум прямых линий связи для различных терминалов 116 и 122 доступа. Также точка доступа, используя формирование пучка для передачи на терминалы доступа, случайно размещенные по ее области покрытия, вызывает меньше помех в терминалах доступа в соседних сотах, чем точка доступа, осуществляющая передачу на все свои терминалы доступа через одну антенну.
Точка доступа, например, точка 100 доступа может представлять собой фиксированную станцию, используемую для осуществления связи с терминалами, которая также может называться базовой станцией, узлом В и/или другим подходящим термином. Вдобавок, терминал доступа, например, терминал 116 или 122 доступа также может называться мобильным терминалом, пользовательским оборудованием (UE), устройством беспроводной связи, терминалом, беспроводным терминалом и/или другим подходящим термином.
На фиг.2 представлена блок-схема системы 200 беспроводной связи с множеством входов и множеством выходов (MIMO), которая облегчает передачу и обнаружение пространственных потоков данных согласно различным описанным здесь вариантам. В одном примере система 200 включает в себя точку 210 доступа (AP), которая может осуществлять связь с терминалом 220 доступа (AT). Хотя для краткости в системе 200 показана только одна AP 210 и один AT 220, следует учесть, что система 200 может включать в себя любое количество точек AP и/или терминалов AT. Кроме того, хотя последующее описание в целом относится к передаче от AP 210 к AT 220 (например, связь по прямым линиям 120 и 126), следует учесть, что AP 210 и/или AT 220 могут использовать аналогичные компоненты и способы для связи от AT 220 к AP 210 (например, связь по обратным линиям 118 и 124).
В одном примере AP 210 включает в себя источник 212 данных, который может создавать или иным образом получать данные для передачи на один или несколько терминалов AT 220. Данные от источника 212 данных могут посылаться в кодирующую компоненту 214 для обработки данных для связи с терминалом AT 220 посредством передачи MIMO. В кодирующей компоненте 214 последовательность битов, содержащих данные, подлежащие передаче на терминал AT 220, может быть сгруппирована в пространственные потоки для одновременной передачи передатчиками (TMTR) 216 через антенны 218. Кроме того, кодирующая компонента может модулировать каждый пространственный поток, используя один или несколько способов цифровой модуляции, таких как фазовая манипуляция (PSK), двоичная фазовая манипуляция (BPSK), квадратурная фазовая манипуляция (QPSK), 16-позиционная квадратурная амплитудная модуляция (16-QAM), 64-позиционная квадратурная амплитудная модуляция (64-QAM), и/или другой подходящий способ модуляции, благодаря которому биты данных, содержащиеся в каждом потоке, могут отображаться в последовательность модуляционных символов на основе набора точек созвездия. Вдобавок, и/или как альтернативный вариант при разделении пространственного потока по множеству ортогональных поднесущих можно использовать мультиплексирование с ортогональным частотным разделением каналов, с тем чтобы можно было модулировать каждую поднесущую по отдельности с использованием одного или нескольких способов модуляции. Затем отображенные модуляционные символы для каждого потока можно подать через ряд из NT антенн 218 в соответствующе передатчики 216 для связи с терминалом AT 220 в виде модулированных аналоговых сигналов.
В терминале AT 220 рядом NR приемников (RCVR) 224 может осуществляться прием пространственных потоков, соответствующих сигналам, переданным точкой доступа AP 210 через соответствующие антенны 222. В одном примере NR-мерный вектор y приема, соответствующий потокам, полученным на терминале AT 220, может быть выражен следующим образом:
y=Hx+n (1)
где H - матрица NR×NT, соответствующая действующему каналу MIMO, через который переданные сигналы проходят между AP 210 и AT 220; x - NT-мерный вектор передачи, соответствующий потокам, переданным от AP 210; и n - NR-мерный вектор, представляющий аддитивный шум.
В другом примере пространственные потоки, полученные приемниками 224, могут быть направлены в компоненту 226 обнаружения сигнала, которая может использовать потоки, принятые приемниками 224, и информацию о действующем канале MIMO для получения потоков, переданных точкой доступа AP 210. Согласно одному варианту компонента 226 обнаружения сигнала может определить результаты жесткого решения для битов в пространственных потоках, принятых от AP 210, путем определения ожидаемого знака каждого бита. Например, биты, имеющие значение 1, могут быть представлены результатом жесткого решения в виде +1, в то время как биты, имеющие значение 0, могут быть представлены результатом жесткого решения в виде -1. В альтернативном варианте компонента 226 обнаружения сигнала может определить результаты мягкого решения для битов пространственных потоков, принятых от AP 200, путем определения ожидаемого знака каждого бита вдобавок к оценке правдоподобия того, что соответствующий ожидаемый знак для каждого бита обнаружен правильно, например, оценка правдоподобия того, что бит был послан в виде +1 или -1. Согласно другому варианту компонента 226 обнаружения сигнала может обеспечить несложное обнаружение «мягких» результатов путем использования одного или нескольких алгоритмов обнаружения «квазимягких» результатов по методу максимального правдоподобия (квази-SOMLD), описанных ниже. После успешного обнаружения обнаруженные потоки можно подать в приемник 228 данных для их использования терминалом AT 220.
На фиг.3 представлена блок-схема, иллюстрирующая примерную компоненту 300 для обнаружения сигнала, которую можно использовать в системе связи MIMO согласно различным вариантам. В качестве конкретного примера, но не как ограничение компоненту 300 для обнаружения сигнала можно использовать в системах MIMO, где применяется стандарт IEEE 802.11n или аналогичный стандарт, в приложениях многопользовательского обнаружения, многорежимных волоконных приложениях и/или любых других подходящих системах или приложениях для связи. Кроме того, следует учесть, что компонента 300 обнаружения сигнала может использоваться любым соответствующим сетевым объектом в системе связи MIMO, таким как точка доступа (например, AP 210), терминал доступа (например, AT 220) и/или любой другой подходящий объект. Вдобавок, компонента 300 обнаружения сигнала может быть внутренней по отношении к соответствующему сетевому объекту или внешней, соединенной при этом каналом связи с одним или несколькими связанными сетевыми объектами.
Согласно одному варианту компонента 300 обнаружения сигнала включает в себя компоненту 310 обработки канала MIMO, которая может определить и/или запомнить информацию, относящуюся к действующему каналу MIMO, через который пространственные потоки передаются на сетевой объект (например, AP 210 и/или AT 220). В одном примера компонента 310 обработки канала может представлять канальную информацию в виде канальной матрицы MIMO, которая по своей структуре может быть подобна канальной матрице H MIMO, использованной в уравнении (1). В качестве конкретного примера компонента 310 обработки канала MIMO может получить канальную матрицу MIMO: через процесс обучения на основе, например, заголовков, закрепленных за одним или несколькими пакетами, принятыми компонентой 300 обнаружения сигнала; одним или несколькими способами «слепой» и/или «полуслепой» канальной оценки; и/или другими подходящими способами.
В конкретном примере компонента 310 обработки канала MIMO может выполнять разложение и/или другие подходящие способы предварительной обработки канальной матрицы MIMO до обнаружения сигнала. Однако следует иметь в виду, что предварительная обработка не обязательно должна выполняться компонентой 310 обработки канала MIMO и что компонента 300 обнаружения сигнала может выполнять обнаружение сигнала, используя один или несколько способов, описанных ниже, с или без предварительной обработки, выполняемой компонентой 310 обработки канала MIMO. В качестве дополнительного конкретного примера, но не как ограничение компонента 310 обработки канала MIMO может выполнить предварительную обработку канальной матрицы MIMO путем осуществления QR разложения матрицы. Используя QR разложение, компонента 310 обработки канала MIMO может представить канальную матрицу H MIMO в виде произведения ортогональной матрицы Q и верхнетреугольной матрицы R. После выполнения QR разложения компонента 310 обработки канала MIMO может передать разложенную канальную матрицу QR на одну или несколько подходящих компонент либо вместо них, либо вдобавок в дополнение к необработанной канальной матрице H. В дополнительном примере компонента 310 обработки канала MIMO может непрерывно отслеживать изменения в действующем канале MIMO и в соответствии с изменениями может выполнять корректировку канальной матрицы.
Согласно другому варианту компонента 300 обнаружения сигнала включает в себя компоненту 320 вычисления расстояния. Компонента 320 вычисления расстояния может получить ряд принятых потоков, которые могут приниматься набором приемников (например, приемники 224) и/или другими подходящими компонентами или сетевыми объектами. В альтернативном варианте компонента 320 вычисления расстояния (и/или другие субкомпоненты в компоненте 300 обнаружения сигнала) может принимать входные значения для мягкого решения, соответствующие ряду принятых потоков, на основе которых компонента 300 обнаружения сигнала может обнаружить квазимягкие результаты по критерию максимума апостериорной вероятности (MAP) на основе одного или нескольких алгоритмов обнаружения сигнала, описанных ниже.
В одном примере компонента 320 вычисления расстояния принимает ряд пространственных потоков, соответствующих вектору y приема, использованному в уравнении (1). На основе вектора y приема и канальной матрицы H MIMO, полученной из компоненты 310 обработки канала MIMO, компонента 320 вычисления расстояния может определить расстояния между переданными потоками в векторе x передачи и все возможные комбинации точек созвездия, использованные для модуляции этих потоков (например, кодирующей компонентой 214). Затем эти определенные расстояния могут быть использованы генератором 340 результатов мягкого решения для определения результатов мягкого решения, отражающих ожидаемые значения битов в переданных потоках, а также их соответствующие оценки правдоподобия. Согласно одному варианту результаты мягкого решения, созданные генератором 340 результатов мягкого решения, которые соответствуют обнаруженным потокам, могут затем быть использованы декодером (не показан), который может использовать «внешний код» для дальнейшей обработки потоков. Внешний код, используемый декодером, может иметь возможность исправления ошибок, которая может, например, вводить избыточность с целью повышения качества линий беспроводной связи, направленных на и/или идущих от объекта, использующего компоненту 300 обнаружения сигнала. Кроме того, внешним кодом, используемым декодером, может быть сверточный код, код с малой плотностью проверок на четность (LDPC) и/или другой подходящий тип кода.
В другом примере компонента 320 вычисления расстояния может использовать один или несколько алгоритмов обнаружения квазимягких результатов по методу максимального правдоподобия (квази-SOMLD) путем выполнения цикла по набору точек созвездия, используемых для модуляции переданных потоков, для определения расстояний между переданными потоками и точками созвездия. Эти расстояния можно определить, например, используя такую метрику расстояния, как аппроксимированная l1-норма, l1-норма, l2- норма, l∞ норма и/или другую подходящую метрику расстояния. В стандартном алгоритме жесткого решения MLD вычисление оптимальной метрики расстояния для каждого потока требует выполнения циклов по всем возможным точкам созвездия для всех потоков. Таким образом, в конкретном примере, где использовано NT переданных потоков, модулированных соответствующим образом с использованием созвездия размера М, стандартный алгоритм MLD потребует вычисления расстояний для  возможных комбинаций точек созвездия. В результате вычислительная сложность стандартной процедуры MLD растет по экспоненциальному закону, что делает ее неприемлемой для многих приложений. Для стандартной процедуры MLD можно применить QR разложение, что позволяет получить окончательный объем необходимых вычислений посредством квантования. Однако в указанном алгоритме сохраняется экспоненциальный характер нарастания сложности, когда, например, требуется провести
возможных комбинаций точек созвездия. В результате вычислительная сложность стандартной процедуры MLD растет по экспоненциальному закону, что делает ее неприемлемой для многих приложений. Для стандартной процедуры MLD можно применить QR разложение, что позволяет получить окончательный объем необходимых вычислений посредством квантования. Однако в указанном алгоритме сохраняется экспоненциальный характер нарастания сложности, когда, например, требуется провести  вычислений, где для модуляции NT передаваемых потоков используется созвездие размера M. Аналогичным образом, алгоритм SOMLD с QR разложением требует выполнение циклов по всем NT переданным потокам, так чтобы каждый поток можно было представить с окончательной размерностью и найти посредством нарезки, что дает оценку сложности порядка
вычислений, где для модуляции NT передаваемых потоков используется созвездие размера M. Аналогичным образом, алгоритм SOMLD с QR разложением требует выполнение циклов по всем NT переданным потокам, так чтобы каждый поток можно было представить с окончательной размерностью и найти посредством нарезки, что дает оценку сложности порядка  . В отличие от этого компонента 320 вычисления расстояния может вычислять метрики расстояния для переданных потоков по точкам созвездия путем применения способов оценки значений, использованных для вычислений посредством одного или нескольких субоптимальных алгоритмов MIMO, таких как обнаружение на основе списка для каждого потока (PSLD), обнаружение на основе редуцированной решетки (LRD), алгоритм направленного поиска по М точкам и/или другие подходящие алгоритмы, с тем чтобы не было необходимости выполнения цикла по всем возможным точкам созвездия. В результате компонента 320 вычисления расстояния может значительно уменьшить необходимую сложность обнаружения мягких результатов, обеспечивая при этом метрики расстояния, близкие к оптимальным. В дополнительном примере компонента 320 вычисления расстояния может взаимодействовать с компонентой 330 хранения расстояний, которая может запоминать вычисленные метрики расстояния для дальнейшего совершенствования вычисления и использования расстояний компонентной 300 обнаружения сигнала. В качестве конкретного примера компонента 330 хранения расстояний может быть использована для обеспечения улучшенного использования метрик расстояния (UMU), как описано ниже.
. В отличие от этого компонента 320 вычисления расстояния может вычислять метрики расстояния для переданных потоков по точкам созвездия путем применения способов оценки значений, использованных для вычислений посредством одного или нескольких субоптимальных алгоритмов MIMO, таких как обнаружение на основе списка для каждого потока (PSLD), обнаружение на основе редуцированной решетки (LRD), алгоритм направленного поиска по М точкам и/или другие подходящие алгоритмы, с тем чтобы не было необходимости выполнения цикла по всем возможным точкам созвездия. В результате компонента 320 вычисления расстояния может значительно уменьшить необходимую сложность обнаружения мягких результатов, обеспечивая при этом метрики расстояния, близкие к оптимальным. В дополнительном примере компонента 320 вычисления расстояния может взаимодействовать с компонентой 330 хранения расстояний, которая может запоминать вычисленные метрики расстояния для дальнейшего совершенствования вычисления и использования расстояний компонентной 300 обнаружения сигнала. В качестве конкретного примера компонента 330 хранения расстояний может быть использована для обеспечения улучшенного использования метрик расстояния (UMU), как описано ниже.
Согласно следующему варианту компонента 300 обнаружения сигнала может включать в себя генератор 340 результатов мягкого решения, который может использовать метрики расстояния, найденные для ряда переданных потоков, с целью создания результата мягкого решения, относящихся к ожидаемым значениям и оценкам правдоподобия отдельных битов в переданных потоках. В одном примере генератор 340 результатов мягкого решения может получить метрики расстояния относительно набора точек созвездия для потока xp в векторе x передачи от компоненты 320 вычисления расстояния и/или компоненты 330 хранения расстояний. На основе этих метрик расстояния можно получить результирующее значение мягкого решения для каждого бита, который представляет xp, например, путем использования логарифмического отношения правдоподобия (LLR). В одном примере генератор 340 результатов мягкого решения может вычислить аппроксимацию LLR для k-го бита bk, который представляет xp, следующим образом:

где d(xp) - метрика расстояния, принятая от компоненты 320 вычисления расстояния и/или компоненты 330 хранения расстояний, в функции xp; минимумы ищут по всем значениям (например, всем возможным точкам созвездия) xp, для которых bk=0 и bk=1 соответственно; а σn 2 обозначает дисперсию аддитивного шума n, используемую в уравнении (1). В альтернативном варианте следует иметь в виду, что генератор результатов мягкого решения может использовать любой другой подходящий способ получения мягкого решения либо в дополнение, либо вместо вычисления LLR. Кроме того, результаты мягкого решения можно дополнительно квантовать, получив после вычисления заранее определенное количество бит. После создания результатов мягкого решения их можно представить в виде обнаруженного потока, выходящего из компоненты 300 обнаружения сигнала. Дополнительно и/или как альтернативный вариант генератор 340 результатов мягкого решения может обеспечить результаты жесткого решения для каждого бита в переданных потоках, например, путем определения знака соответствующих результатов мягкого решения.
Обратимся к фиг.4-8, где показаны методики обнаружения сигнала в сети беспроводной связи. Хотя в целях упрощения пояснений эти методики показаны и описаны в виде последовательности действий, следует понимать и учесть, что эти методики не ограничиваются порядком действий, так как некоторые действия могут согласно одному или нескольким вариантам осуществляться в другом порядке и/или выполняться параллельно с другими действиями в отличие от того, как это здесь показано и описано. Например, специалисты в данной области техники поймут и учтут, что в альтернативном варианте методика может быть представлена в виде последовательности взаимосвязанных состояний или событий, например, в виде диаграммы состояний. Кроме того, для реализации методики согласно одному или нескольким вариантам могут потребоваться не все показанные здесь действия.
Обратимся к фиг.4, где показана методика 400 несложного обнаружения квазимягких результатов по методу максимального правдоподобия (квази-SOMLD) в системе связи MIMO (например, система 200 связи). Следует учесть, что методика 400 может быть реализована базовой станцией (например, AP 210), мобильным терминалом (например, AT 220) и/или любым другим подходящим объектом в сети беспроводной связи. Методика 400 начинается с блока 402, где выполняется предварительная обработка на канальной матрице (например, компонентой 310 обработки канала MIMO в компоненте 300 обнаружения сигнала), которая представляет действующий канал MIMO между передающим объектом и принимающим объектом в системе MIMO. В качестве конкретного примера, но не как ограничение предварительная обработка, выполняемая в блоке 402, может включать в себя QR разложение, где канальная матрица H разлагается на произведение QR унитарной или ортогональной матрицы Q и верхнетреугольной матрицы R. В альтернативном варианте матрица Q может представлять собой ортогональную матрицу. Однако следует учесть, что QR разложение является лишь одним из примеров предварительной обработки, которая может выполняться в блоке 402, и вдобавок или вместо QR разложения может выполняться другая предварительная обработка и/или использованы иные способы разложения матрицы. Кроме того, следует учесть, что предварительная обработка в блоке 402 не является обязательной при выполнении методики 400. После необязательной предварительной обработки в блоке 402 согласно методике 400 в блоке 404 выполняется инициализация для первого переданного потока. Затем согласно методике 400 возможен переход к соответствующим переданным потокам, подлежащим обнаружению, как показано с помощью блоков 406-410. В одном примере переданные потоки, используемые в блоках 406-410, могут быть представлены вектором x передачи, использованным в уравнении (1).
В одном примере методика 400 может выполняться для каждого переданного потока, подлежащего обнаружению в блоках 406-410, следующим образом. В блоке 406 выполняется цикл для каждого потока по набору точек созвездия (например, компонентой 320 вычисления расстояния в компоненте 300 обнаружения сигнала) с целью оценки других элементов с использованием субоптимального алгоритма MIMO. Элементами, оцениваемыми в блоке 406, могут быть, например, другие переданные потоки и/или любые другие элементы, необходимые для вычисления метрик расстояния в блоке 408. Вдобавок, набор точек созвездия может представлять набор модуляционных символов, используемых объектом в системе MIMO, которая передала потоки, подлежащие обнаружению с помощью методик 400. Как в общем виде было описано выше, благодаря оценке других элементов для каждого потока в блоке 406 для набора точек созвездия нет необходимости выполнять цикл по всем возможным комбинациям точек созвездия для каждого переданного потока, как это требуется в стандартных алгоритмах SOMLD. В результате может быть значительно упрощено обнаружение сигнала при сохранении возможности вычисления метрик расстояния и мягких результатов, близких к оптимальным. В качестве конкретного примера, но не как ограничение субоптимальные алгоритмы MIMO, которые могут быть использованы в блоке 406, включают в себя обнаружение на основе списка для каждого потока (PSLD), обнаружение на основе редуцированной решетки (LRD), алгоритм направленного поиска по М точкам, обращение в нуль незначащих коэффициентов (ZF), алгоритм на основе минимальной среднеквадратической ошибки (MMSE) и/или любой другой подходящий алгоритм. Примерные алгоритмы детально рассмотрены на последующих чертежах и соответствующих разделах описания.
После выполнения циклов для каждого потока в блоке 406 выполнение методики 400 продолжается в блоке 408, где определяют метрики расстояния для текущего потока по точкам созвездия, по которым была выполнена циклическая обработка в блоке 406 (например, компонентой вычисления расстояния в компоненте 300 обнаружения сигнала). В одном примере метрики расстояния получают с использованием канальной матрицы, представляющей действующий канал MIMO, по которому были приняты переданные потоки, которые могли быть или не быть предварительно обработаны в блоке 402. Вдобавок метрики расстояния в блоке 408 можно определить, используя такую метрику расстояния, как аппроксимированная l1-норма, l1-норма, l2- норма, l∞ и/или другую подходящую метрику расстояния.
После определения в блоке 408 метрик расстояния для текущего потока выполнение методики 400 продолжается в блоке 410 для определения того, имеются ли еще переданные потоки. Если дополнительные потоки имеются, то выполнение методики 400 продолжается в блоке 412 для следующего переданного потока и для указанного потока повторяется выполнение блоков 406-410. Если дополнительных переданных потоков больше нет, то выполнение методики 400 завершается в блоке 414 получением результатов мягкого решения на основе метрик расстояния, определенных в блоке 408 для каждого потока (например, посредством генератора 340 результатов мягкого решения в компоненте 300 обнаружения сигнала). В качестве конкретного примера, но не как ограничение результаты мягкого решения в блоке 414 могут быть созданы путем определения логарифмических отношений правдоподобия (LLR) для каждого бита переданных потоков на основе метрик расстояния, вычисленных в блоке 408. Однако следует иметь в виду, что для создания результатов мягкого решения в блоке 414 могут быть использованы и другие способы. Вдобавок следует учесть, что в блоке 414 также могут быть созданы результаты жесткого решения, например, путем определения знака соответствующих результатов мягкого решения. В другом примере результаты жесткого решения для переданного потока могут быть созданы в результате выполнения обратного отображения созвездия для точки созвездия, которая минимизирует метрику расстояния, вычисленного в блоке 408 для переданного потока. Соответственно результат жесткого решения для переданного потока x3 может быть определен путем поиска минимальной метрики d(x3) расстояния, вычисленного в блоке 408, и соответствующего значения x3. На основе определенного значения x3 можно использовать обратное отображение созвездия для получения битов определенного значения x3 и значений, оцененных для соответствующих величин x2 и x1 в блоке 406.
На фиг.5 показана методика 500 для алгоритма квази-SOMLD в системе связи MIMO с использованием алгоритма обнаружения на основе списка для каждого потока (PSLD). Методика 500 может выполняться базовой станцией, мобильным терминалом и/или любым другим подходящим объектом в сети беспроводной связи. В последующем описании алгоритм PSLD обычно описывается для последовательности 3 переданных потоков (например, от 3 передающих антенн 218 в точке доступа AP 210). Однако следует учесть, что методику 500 можно аналогичны образом использовать для любого количества переданных потоков. Последующее описание относится к конкретному примеру PSLD, не являющемуся ограничением, где в качестве метрики расстояния используется аппроксимированная l1-норма следующим образом:

Однако следует учесть, что для метрики расстояния могут быть использованы и другие нормы.
Выполнение методики 500 может начинаться с блока 502, где выполняется QR разложение канальной матрицы, представляющей действующий канал MIMO, для создания QR ориентации для каждого переданного потока. В одном примере QR разложение может выполняться в блоке 502 для трех перестановок канальной матрицы H, используемой в уравнении (1), так что каждая строка матрицы H переставляется таким образом, чтобы она была последней строкой только один раз. Затем может быть выполнено QR разложение на каждой перестановке для получения трех QR «ориентаций». Хотя обсуждение последующих блоков на фиг.5 в общем случае относится к вычислению результатов мягкого решения на основе QR ориентаций для каждого переданного потока, следует иметь в виду, что QR разложение в блоке 502 не является обязательным в качестве составной части методики 500 и что методика 500 может выполняться также и для не разложенной канальной матрицы аналогичным образом согласно последующему описанию.
Выполнение методики 500 продолжается далее в блоке 504, где выполняется цикл по набору точек созвездия для каждого переданного потока, чтобы оценить другие элементы, необходимые для вычисления расстояния, с использованием субоптимального алгоритма MIMO на основе PSLD. В качестве конкретного примера, но не как ограничение оценка может быть выполнена с использованием обращения в нуль незначащих коэффициентов (ZF), ZF с последующим подавлением помех, оценки среднеквадратической ошибки (MMSE) и/или других подходящих субоптимальных алгоритмов MIMO. Хотя последующее описания относится к конкретному примеру использования ZF с последующим подавлением помех, следует учесть, что в блоке 504 аналогичным образом может использовать любой субоптимальный алгоритм MIMO, и кроме того, следует иметь в виду, что все указанные алгоритмы, разумеется, не выходят за рамки объема прилагаемой формулы изобретения.
Для каждого принятого MIMO вектора y для выполнения циклов по всем переданным потокам, обозначенным здесь как x3, x2 и x1 соответственно, можно использовать три QR ориентации, созданные в блоке 502. Для краткости последующее описание относится только к действиям, выполняемым в блоке 504 для первой ориентации, где Hpermuted=H=QR, причем описывается только цикл по набору точек созвездия для переданного потока x3. Однако следует учесть, что действия, описанные в блоке 504, аналогичным образом могут выполняться для других переданных потоков.
В одном примере оценка переданного потока x3 в блоке 504 может происходить следующим образом. Перед выполнением цикла по точкам созвездия может быть определен промежуточный вектор y' с использованием уравнения y'=Q(1:NR,1:NT)Hy, где Q(1:NR,1:NT) представляет набор элементов в Q, имеющих индексы от 1 до NR и от 1 до NT. Для переданного потока x3 из промежуточного вектора y' может быть выполнен цикл по набору точек созвездия для определения второго промежуточного вектора y'' для каждого возможного значения x3 с использованием уравнения y''=y'-R(1:3,3)x3. На основе промежуточных векторов y'', определенных для каждой точки созвездия, можно оценить соответствующие переданные потоки x2 с использованием уравнения x2=Slice(y”2/r22), где Y''2 - второй элемент y'', Slice() - операция квантования до ближайшей точки созвездия, а r22 - элемент (2,2) матрицы R. Затем путем нахождения x2 может быть определена l1-нормальная аппроксимация y''2-r22x2, которую можно использовать в блоке 506 и которая равна |Re(y''2-r22x2)|+|Im(y''2-r22x2)|. На основе этого может быть вычислено третье промежуточное значение y'''1 с использованием уравнения y'''1=y''1-r12x2, и из этого уравнения можно получить оценку переданного потока x1, используя уравнение x1=Slice(y'''1/r11). Исходя из оцененного значения x1, можно определить l1-нормальную аппроксимацию y'''1-r11x1, которую можно использовать в блоке 506 и которая равна |Re(y'''1-11x1)|+|Im(y'''1-r11x1)|.
После выполнения оценки в блоке 504 выполнение методики 500 может продолжиться в блоке 506, где определяют метрики расстояния для переданных потоков по точкам созвездия. Хотя блоки 504 и 506 в методике 500 показаны как два отдельных действия, следует иметь в виду, что действия, описанные в блоках 504 и 506, могут выполняться вместе, например, вычисление метрик расстояния в блоке 506 может выполняться после каждой точки созвездия, для которой выполнен цикл в блоке 504, или, в альтернативном варианте, метрики расстояния в блоке 506 могут вычисляться для каждого потока, для которого выполняется цикл в блоке 504. В качестве конкретного примера, но не как ограничение вычисление метрик расстояния в блоке 506 может выполняться следующим образом. Сначала для соответствующих возможных точек созвездия может быть вычислена метрика расстояния для переданного потока x3 с использованием аппроксимированной l1-нормы, заданной уравнением (3), следующим образом:
Затем могут быть выполнены аналогичные циклы и вычисление метрик расстояния для переданных потоков x2 и x1 в блоках 504 и 506 для получения метрик расстояния для каждой возможной точки созвездия в каждом переданном потоке.
После вычисления в блоке 506 метрик расстояния для переданных потоков выполнение методики 500 может завершиться в блоке 508 получением результатов мягкого решения путем вычисления логарифмических отношений правдоподобия (LLR) для каждого бита в переданном потоке на основе, по меньшей мере частично, метрик расстояния, определенных в блоке 506. В качестве конкретного примера отношения LLR могут быть определены для k-го бита bk в переданном потоке x1 с использованием выражения для LLR, заданного уравнением (2), следующим образом:

Вдобавок, можно вычислить отношения LLR для других переданных потоков в x с использованием аналогичных выражений для LLR, подобных уравнениям (2) и (5).
На фиг.6 показана методика 600 для алгоритма квази-SOMLD в системе связи MIMO с использованием алгоритма обнаружения на основе редуцированной решетки (LRD). Методика 600 может быть реализована базовой станцией, мобильным терминалом и/или любым другим подходящим объектом в сети беспроводной связи. В последующем описании алгоритм LRD обычно описывается для последовательности из 3 переданных потоков (например, от 3 передающих антенн 218 в точке доступа AP 210). Однако следует иметь в виду, что методология 600 аналогичным образом может быть применена для любого количества переданных потоков.
Выполнение методики 600 может начинаться с блока 602, где выполняется QR разложение канальной матрицы, представляющей действующий канал MIMO, для создания QR ориентации для каждого переданного потока. В одном примере QR разложение может быть выполнено в блоке 602 для трех перестановок канальной матрицы H, используемой в уравнении (1), так что каждая строка матрицы H переставляется таким образом, чтобы она оказывалась последней строкой только один раз. Затем может быть выполнено QR разложение на каждой перестановке для получения трех QR «ориентаций». Хотя обсуждение последующих блоков на фиг.6 в общем случае относится к вычислению результатов мягкого решения на основе QR ориентаций для каждого переданного потока, следует иметь в виду, что QR разложение в блоке 602 не является обязательным в качестве составной части методики 600 и что методика 600 может выполняться для не разложенной канальной матрицы аналогичным образом согласно последующему описанию.
Выполнение методики 600 продолжается далее в блоке 604, где используется масштабирование и/или смещение коэффициентов применительно к вектору приема для преобразования каждого элемента в векторе приема в комплексное целое число. Это может быть выполнено в блоке 606, например, для облегчения редукции базисов решеток (LBR). В одном примере вектор приема, используемый в блоке 604, может являться вектором y приема, используемым в уравнении (1), который можно получить от набора приемников и/или других подходящих компонент. Согласно одному варианту алгоритм LRD, выполняемый согласно методике 600, основан на LBR. После LBR матрица P определяется таким образом, что P и Р-1 состоят только из комплексных целых элементов и таким образом, что H'=HP (где H' является другим базисом) оказывается более ортогональным. Таким образом, точка y, представленная x в базисе H, может быть представлена как z=P-1x в базисе H', причем это может быть выражено с использованием уравнения y=Hx=(HP)(P-1x)=H'z. Кроме того, если x - это вектор, имеющий точки созвездия с комплексными целочисленными значениями, для оценки элементов в блоке 608 можно использовать простое округление в «z-области», поскольку P-1 имеет комплексные целочисленные элементы.
Следовательно, в блоке 604 может быть выполнено масштабирование и смещение для вектора y с целью преобразования модели системы MIMO в комплексные целочисленные представления, которые можно использовать для LBR и LRD. В одном примере вектор y может быть масштабирован и смещен следующим образом для получения масштабированной и смещенной версии ys+s.
где cscale=0,5√((M-1)/1,5), M - размер созвездия, используемого для передачи потоков, подлежащих обнаружению (например, размер схемы модуляции типа M-QAM, используемой кодирующей компонентой 214), а cshift - NT-мерный вектор, все элементы которого равны -0,5-0,5j. В одном конкретном примере x состоит только из точек созвездия в схеме модуляции, используемой для передачи, и в результате s является его комплексным целочисленным представлением.
Исходя из вышесказанного видно, что для преобразования принятого вектора в формат, подходящий для LBR, что выполняется в блоке 606, в блоке 604 можно использовать вторую строку уравнения (6). Кроме того, можно видеть, что преобразование, заданное уравнением (6), может привести к более высокой эффективности использования способов субоптимального обнаружения MIMO. Например, «простое» обнаружение MIMO с обращением в нуль незначащих коэффициентов (ZF) применяется путем умножения ys+s на (HP)-1 следующим образом:
Поскольку HP более ортогональна, чем H, и в результате (HP)-1n' не вызывает столь большое увеличение шума, как H-1n при «плоском» ZF, благодаря использованию уравнения (7) можно повысить эффективность обработки. Кроме того, поскольку P-1s может состоять из комплексных целочисленных значений, можно применительно к z выполнить операции квантования с применением простых операций округления. Затем могут быть найдены оценки z и s следующим образом
Специалистам в данной области техники очевидны возможные трудности учета границ созвездия в отношении вектора z. В результате оцененные значения для s и x могут оказаться вне границ созвездия для s или x. Соответственно, потребуется дополнительный шаг квантования и для декодирования результатов мягкого решения, чтобы получить точки созвездия внутри границ созвездия. Однако следует иметь в виду, что дополнительный шаг квантования для декодирования результатов мягкого решения требуется не всегда, так как с точки зрения эффективности и сложности возможно, что выгоднее будет выполнить обнаружение применительно, например, к s путем использования уравнения sest=Pzest. Тогда на основе вышесказанного метрика евклидового расстояния вычисляется следующим образом:
После выполнения масштабирования и смещения в блоке 604 выполнение методики 600 может продолжиться в блоке 606, где выполняется цикл по набору точек созвездия для каждого переданного потока с целью оценки других элементов, необходимых для вычисления расстояния с использованием субоптимального алгоритма MIMO на основе MRD. В одном примере цикл выполняется в блоке 606 для каждого пространственного потока по возможным точкам созвездия пространственного потока, а для оценки других двух пространственных потоков используют LBR. Хотя последующее описание относится к выполнению LBR на канальной матрице, разложенной с использованием QR разложения, следует учесть, что аналогичные способы можно использовать для выполнения LBR на не разложенной канальной матрице или канальной матрице, разложенной с использованием другого способа разложения. Кроме того, хотя последующее описание относится в целом к ряду из трех переданных потоков, следует иметь в виду, что аналогичные способы можно использовать для обнаружения любого количества переданных потоков.
В конкретном примере первая QR ориентация может быть использована в нормальном порядке H=[h1 h2 h3], а цикл в блоке 606 может быть выполнен для всех возможных значений (например, все возможные точки созвездия) переданного потока x3. Затем для первой QR ориентации, где Hpermuted=H=QR, может быть выполнено LBR на первых двух строках матрицы R для получения модифицированной матрицы Q и R, которые могут быть представлены как QLR и RLR, так что QLR(1:Nr, 1:Nt)RLR(1:Nt, 1:Nt)=HhtrmutedP', где P' имеет следующую структуру:
Поскольку цикл в блоке 606 выполняется для всех значений x3, следует иметь в виду, что нет необходимости использовать LBR для последнего столбца матрицы Hpermuted.
В другом конкретном примере LBR для матрицы R(1:NT-1, 1:NT) (например, для R(1:2, 1:3)) детализируется следующим псевдокодом, представленным в таблице 1.
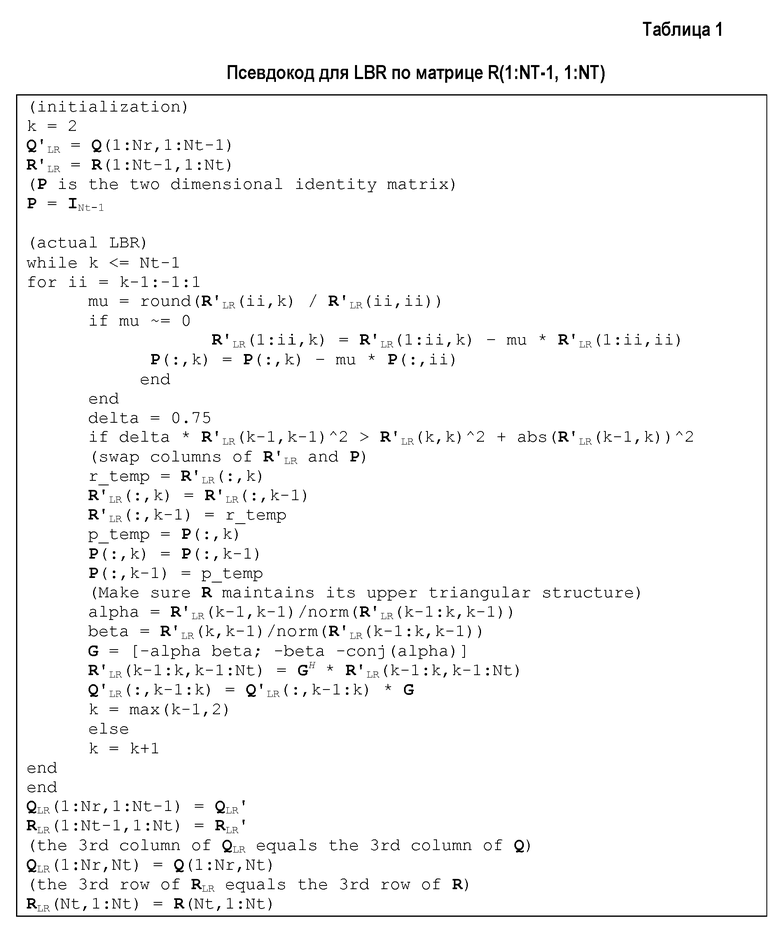
Как видно из псевдокода в таблице 1, проверка выполняется столько раз, сколько указано переменной mu, причем искомый столбец матрицы R можно вычесть из других столбцов. Далее определяется, является ли столбец с максимальным показателем крайне правым столбцом (то есть (NT-1)-й столбец). Если столбец с максимальной мощностью не является крайне правым столбцом, то крайне правый столбец и столбец с максимальной мощностью меняют местами. После перемены мест столбцов матрица может быть использована для поддержки верхнетреугольной структуры R.
В одном примере при использовании вышеописанной операции LBR выполнение циклов в блоке 606 может происходить следующим образом. Хотя последующее описание относится к выполнению циклов для третьего переданного потока x3, следует иметь в виду, что аналогичным образом может быть организовано выполнение циклов в блоке 606 и для других переданных потоков. Сначала на основе масштабированного и смещенного вектора ys+s, полученного в блоке 604, который может быть представлен в виде:

промежуточный вектор y' путем использования уравнения y'=QLR(1:Nr, 1:Nt)Hys+s. На основе вектора y' может быть выполнен цикл для переданного потока x3 по набору возможных точек созвездия с целью определения второго промежуточного вектора y'' для каждого возможного значения x3 путем использования уравнения y''=y'-RLR(1:3,3)z3, где RLR(1:3,3) - первые три элемента третьего столбца матрицы RLR и z3=cscalex3+cshift, где cshift - один элемент матрицы cshift. В одном примере соответствующие значения z3 могут быть вычислены заранее до выполнения циклов в блоке 606. На основе промежуточных векторов y'', определенных для каждой точки созвездия, можно оценить соответствующее значение для z2 путем использования уравнения z2=round(y''2/rLR,22), где y''2 - второй элемент y'', round() - операция округления до ближайшего комплексного целого числа, а rLR,22 - элемент (2,2) матрицы RLR. Получив z2, можно затем определить l1-нормальную аппроксимацию y''2-rLR,22z2, которая представляет собой |Re(y''2-rLR,22z2)|+|Im(y''2 -rLR,22z2)|. На основе этого можно вычислить третье промежуточное значение y'''1 c использованием уравнения y'''1=y''1-rLR,12z2, а из этого уравнения можно оценить соответствующее значение для z1, используя уравнение z1=round(y'''1/rLR,11). Исходя из оценки значения x1, можно определить l1-нормальную аппроксимацию y'''1-rLR,11z1, которую можно использовать в блоке 606 и которая равна |Re(y'''1-rLR,11z1)|+|Im(y'''1-rLR,11z1)|.
На основе этих вычислений для переданного потока x3 можно затем вычислить метрику расстояния для каждого возможного значения (например, каждая возможная точка созвездия) для x3, используя аппроксимальную l1-норму, задаваемую уравнением (3), следующим образом:

Затем в блоке 606 может быть выполнен аналогичный цикл и вычислены метрики расстояния для получения метрик расстояния для каждого переданного потока.
После вычисления в блоке 606 метрик расстояния для переданных потоков выполнение методики 600 может завершиться в блоке 608 получением результатов мягкого решения путем вычисления логарифмических отношений правдоподобия (LLR) для каждого бита в переданных потоках на основе, по меньшей мере частично, метрик расстояния, определенных в блоке 606. В качестве конкретного примера отношения LLR могут быть определены для k-го бита bk в переданном потоке x1, используя выражение для LLR, задаваемое уравнением (2), следующим образом:

Вдобавок, могут быть вычислены отношения LLR для других переданных потоков в векторе x с использованием выражений для LLR, аналогичных заданным в уравнениях (2) и (13).
Обратимся к фиг.7, где показана методика 700 для квази-SOMLD в системе связи MIMO с использованием алгоритма направленного поиска по М точкам. Методика 700 может быть реализована, например, точкой доступа, терминалом доступа и/или любым другим подходящим объектом в сети беспроводной связи. В последующем описании методика 700 обычно описывается для последовательности из 3 переданных потоков (например, от 3 передающих антенн 218 в точке доступа AP 210). Однако следует иметь в виду, что методика 700 аналогичным образом может быть применена для любого количества переданных потоков.
Выполнение методики 700 может начинаться с блока 702, где выполняется QR разложение канальной матрицы, представляющей действующий канал MIMO для создания QR ориентации для каждого переданного потока. В одном примере QR разложение может быть выполнено в блоке 702 для трех перестановок канальной матрицы H, используемой в уравнении (1), так что каждая строка матрицы H переставляется таким образом, чтобы она оказывалась последней строкой только один раз. Затем может быть выполнено QR разложение на каждой перестановке для получения трех QR «ориентаций». Хотя обсуждение последующих блоков на фиг.7 в общем случае относится к вычислению результатов мягкого решения на основе QR ориентаций для каждого переданного потока, следует иметь в виду, что QR разложение в блоке 702 не является обязательным в качестве составной части методики 700 и что методика 700 может выполняться для не разложенной канальной матрицы аналогичным образом согласно последующему описанию.
Затем выполнение методики 700 продолжается в блоке 704, где выполняется цикл по набору точек созвездия для каждого переданного потока с целью получения заранее определенного количества возможных оценок для других элементов, необходимых для вычисления расстояния, с использованием субоптимального алгоритма направленного поиска по М точкам MIMO. Как очевидно специалистам в данной области техники, полный алгоритм SOMLD 3х3 имеет вычислительную сложность, подчиняющуюся экспоненциальному закону. Например, полный алгоритм SOMLD 3×3 для созвездия точек для модуляции 64-QAM схемы обычно требует поиска по 64*64 возможным вариантам. Другими словами, если внешний цикл выполняется по всем вариантам x3, то внутренний цикл по всем вариантам x2 потребуется выполнить для всех вариантов x3, из которых квантование можно получить x1. В отличие от этого при использовании в блоке 704 алгоритма направленного поиска по М точкам необходимая сложность уменьшается благодаря направленному поиску только по M точкам во втором измерении.
В качестве конкретного примера, но не как ограничение, выполнение цикла в блоке 704 может происходить следующим образом. Последующее описание в общем случае относится к алгоритму направленного поиска по M точкам, который может быть выполнен по канальной матрице, разложенной с использованием QR разложения (например, в блоке 702), который называется здесь алгоритмом направленного поиска по M точкам с QR разложением (QRGM). Однако следует учесть, что цикл в блоке 704 аналогичным образом может выполняться для не разложенной канальной матрицы и/или канальной матрицы, разложенной с использованием другого способа разложения.
Сначала перед выполнением цикла по точкам созвездия может быть определен промежуточный вектор y' с использованием уравнения y'=Q(1:NR,1:NT)Hy, где Q(1:NR,1:NT) представляет набор элементов в Q, имеющих индексы от 1 до NR и от 1 до NT. Для переданного потока x3 из промежуточного вектора y' может быть выполнен цикл по набору точек созвездия для определения второго промежуточного вектора y'' для каждого подходящего значения x3 с использованием уравнения y''=y'-R(1:3,3)x3. На основе промежуточных векторов y'', определенных для каждой точки созвездия, можно получить подходящую начальную оценку для соответствующего переданного потока x2 с использованием уравнения x2,est=Slice(y''2/r22), где Y''2 - второй элемент y'', Slice()- операция квантования до ближайшей точки созвездия, и r22 -элемент (2,2) матрицы R. Затем путем нахождения x2 может быть определена l1-нормальная аппроксимация y''2-r22x2, которая равна |Re(y''2-r22x2)|+|Im(y''2-r22x2)|.
Как только определена подходящая начальная оценка x2,est, можно определить частичные метрики расстояния для четырех точек созвездия, окружающих x2,est. В одном примере частичные метрики расстояния могут быть определены в предположении, что вектор y' масштабирован так, что x2,est оказываются на решетке, которая может быть представлена в виде {-7, -5, -3, -1, 1, 3, 5 7} + j*{-7, -5, -3, -1, 1, 3, 5 7}. На основе этого представления могут быть выбраны четыре окружающих точки в виде x2,est + [2, 2j, -2, -2j]. В одном примере выполняется дополнительная проверка для обеспечения того, чтобы окружающие точки не оказались вне границ созвездия. После получения окружающих точек могут быть найдены их частичные метрики расстояния путем нахождения промежуточного значения y''2-r22x2,est, добавления -r22[2, 2j, -2, -2j] и последующего определения четырех соответствующих l1-нормальных аппроксимаций.
Может быть вычислено третье промежуточное значение y'''1 для x2,est и ее четырех окружающих точек с использованием уравнения y'''1=y''1-r12x2 для каждой точки, и из этих уравнений можно получить соответствующие подходящие оценки для переданного потока x1, используя уравнение x1=Slice(y'''1/r11). Исходя из оценок x1, можно определить l1-нормальную аппроксимацию y'''1-r11x1 для каждой оценки, которая равна |Re(y'''1-r11x1)|+|Im(y'''1-r11x1)|. Далее для каждого набора подходящих оценок могут быть определены промежуточные метрики расстояния с использованием следующего уравнения:

Затем, исходя из метрик расстояния, вычисленных с использованием уравнения (14) согласно пяти подходящим начальным оценкам x2, можно взять оценку с минимальной метрикой расстояния в качестве новой оценки, которую можно обозначить x2,new_est, и рассмотреть три новые точки, окружающие эту новую оценку. Например, если x2,new_est=x2,est+2, то новые точки можно определить как x2,new_est+[2, 2j, -2j]. Должно быть ясно, что x2,new_est-2 не используется, поскольку это приводит к точке x2,est, которая уже была определена как не обеспечивающая минимальной метрики расстояния. Затем проверка может выполняться далее, чтобы предотвратить попадание новых точек за границы созвездия. После выбора и проверки новых точек можно найти соответствующие оценки для x1 и метрики расстояния для трех новых точек тем же способом, который был описан выше в отношении точек, окружающих x2,est. В случае, когда x2,new_est=x2,est, блок 704 может оказаться завершающим, и можно будет рассмотреть четыре другие точки вокруг x2,est из такого набора, как, например, [2+2j, -2+2j, -2-2j, 2-2j]. После определения метрик расстояния x2,new_est можно обновить для отражения точки, имеющие минимальную из метрик расстояния, соответствующих точкам x2,new_est и окружающим точкам. Затем вышеуказанные вычисления могут быть итеративно повторены для новой x2,new_est и окружающих точек.
В одном примере блок 704 продолжает функционировать, пока не будет рассмотрено M подходящих точек для x2. Как только это условие будет удовлетворено, выполнение методики 700 может продолжиться в блоке 706, где выбираются возможные значения x2 и x1, для которых были определены минимальные метрики расстояния. Затем в блоке 706 выполняется аналогичный цикл и вычисление метрик расстояния для получения минимальных метрик расстояния для каждого переданного потока. В альтернативном варианте вычисления в блоке 704 могут выполняться путем нахождения градиента и использования этого градиента для определения подходящего значения x2 с минимальным расстоянием. В указанном примере для обеспечения эффективности, подобной алгоритму QRGM при M=8, для вычисления градиента потребуется оценить только 4 точки для X2, но за счет дополнительного усложнения, связанного с расчетом градиента.
После выбора минимальных метрик расстояния в блоке 706 выполнение методики 700 завершается в блоке 708 получением результатов мягкого решения путем вычисления логарифмических отношений правдоподобия (LLR) для каждого бита в переданных потоках на основе, по меньшей мере частично, минимальных метрик расстояния, определенных в блоке 706. В качестве конкретного примера отношения LLR могут определяться для k-го бита bk в переданном потоке x1 с использованием выражения для LLR, задаваемого уравнением (2), следующим образом:

Вдобавок, могут быть вычислены отношения LLR для других переданных потоков в векторе x с использованием выражений для LLR, подобных тем, которые даны в уравнениях (2) и (15).
На фиг.8 показана методика 800 для несложного обнаружения результатов мягкого решения в системе связи MIMO с улучшенным использованием метрик (EMU). Методика 800 может выполняться, например, точкой доступа, терминалом доступа и/или любым другим подходящим объектом в сети беспроводной связи. В последующем описании методика 800 описывается в общем случае для набора из 3 переданных потоков (например, от 3 передающих антенн 218 в AP 210). Однако следует учесть, что методика 800 может быть аналогичным образом применена для любого количества переданных потоков. Общая идея, лежащая в основе EMU, состоит в более эффективном использовании вычисленных метрик расстояния. Например, можно заметить, что метрики расстояния, найденные для данного x3, в действительности также применимы к оценкам x1 и x2 для этого x3. Возможно, что метрика расстояния для соответствующего x2 в ходе выполнения цикла для x2 окажется вовсе не так хороша. Это может возникнуть, например, когда столбец 2 канальной матрицы H, посредством которой получен x2, подвергается замиранию. Таким образом, благодаря повторному использованию метрик расстояния, полученных в цикле x3 для значений x2, оцененных в цикле x3, может быть достигнута некоторая кратность разнесения метрик расстояния.
Последующее описание относится в целом к EMU, используемому с алгоритмом PSLD (например, алгоритм PSLD, реализуемый по методике 500). Однако следует учесть, что EMU можно также использовать с любым другим подходящим алгоритмом типа квази-SOMLD. Методика 800 начинается с блока 802, где запоминаются начальные метрики расстояния для набора точек созвездия в соответствующих массивах для ряда переданных потоков. В одном примере для каждого принятого MIMO вектора y могут быть инициализированы массивы хранения метрик расстояния путем установки значений массивов хранения метрик состояния dstore(x1), dstore(x2) и dstore(x3) на высоком уровне, например, с заранее заданным значением MaxVal для всех x1, x2 и x3 соответственно.
Затем согласно методике 800 в блоке 804 выполняется инициализация первого переданного потока, после которой в блоках 806-810 может выполняться цикл. В блоке 806 цикл может выполняться для текущего рассматриваемого потока по набору точек созвездия с целью оценки других элементов, необходимых для вычисления расстояния, и определения метрик расстояния для соответствующих оцененных элементов. В качестве конкретного примера, но не как ограничение, цикл для переданного потока x3 может выполняться в блоке 806 следующим образом.
До выполнения цикла по точкам созвездия может быть определен промежуточный вектор y' путем использования уравнения y'=Q(1:NR,1:NT)Hy. Исходя из промежуточного вектора Y' может быть выполнен цикл для переданного потока x3 по набору точек созвездия для определения второго промежуточного вектора y'' для каждого возможного значения x3 с использованием уравнения y''=y'-R(1:3,3)x3. На основе промежуточных векторов y'', определенных для каждой точки созвездия, можно оценить соответствующие переданные потоки x2 с использованием уравнения x2=SliceAndIndex(y''2/r22), где Y''2 - второй элемент y'', SliceAndIndex() - операция квантования до ближайшей точки созвездия, которая также обращается к индексу точки созвездия для его использования в блоке 808, а r22 - элемент (2,2) матрицы R. Затем путем нахождения x2 может быть определена l1-нормальная аппроксимация y''2-r22x2, которая равна |Re(y''2-r22x2)|+|Im(y''2-r22x2)|. На основе этого может быть вычислено третье промежуточное значение y'''1 с использованием уравнения y'''1=y''1-r12x2, и из этого уравнения можно получить оценку переданного потока x1, используя уравнение x1=SliceAndIndex(y'''1/r11). Исходя из оцененного значения x1, можно определить l1-нормальную аппроксимацию y'''1-r11x1, которую можно использовать в блоке 506 и которая равна |Re(y'''1-r11x1)|+|Im(y'''1-r11x1)|. Затем может быть вычислена метрика расстояния для возможных точек созвездия для x3 и соответствующих оцененных значений x1 и x2 с использованием аппроксимированной l1-нормы, заданной уравнением (3), следующим образом:

После определения метрик расстояния в блоке 806 выполнение методики 800 может перейти к блоку 808, где вместо запомненных метрик расстояния с более высокими значениями для текущего потока и оцененных других элементов запоминаются метрики расстояния для соответствующих точек созвездия, определенных для текущего потока и оцененных других элементов. В частности, для данного переданного потока x3 и соответствующих оцененных значений для x1, и x2 запомненные метрики расстояния dstore() могут обновляться следующим образом:
После определения метрик расстояния для текущего потока в блоке 808 выполнение методики 800 продолжается в блоке 810, где определяется, имеются ли еще переданные потоки. Если имеются, то выполнение методики 800 продолжается в блоке 812 для следующего переданного потока, для которого повторяется выполнение блоков 806-810. Если переданных потоков больше нет, то выполнение методики 800 завершается в блоке 814 получением результатов мягкого решения на основе, по меньшей мере частично, запомненных метрик расстояния. В качестве конкретного примера, но не как ограничение, результаты мягкого решения в блоке 814 могут быть созданы путем вычисления логарифмических отношений правдоподобия (LLR) для каждого бита в переданных потоках. Например, отношения LLR могут быть определены для k-го бита bk в переданном потоке x1 с использованием выражения для LLR, заданного уравнением (2) для запомненных метрик расстояния, следующим образом:

В альтернативном варианте поиск минимума dstore(x1)=min(dstore(x1),d(x1,x2,x3)) и т.д. выполняется в блоке 808, причем этот поиск может быть объединен с вышеуказанным вычислением LLR. В указанном примере поиски минимума dstore(x1)=min(dstore(x1),d(x1,x2,x3)) и т.д. в блоке 808 не выполняются, а вместо этого каждая метрика расстояния d(x1,x2,x3) для каждой соответствующей комбинации пространственных потоков может быть запомнена в блоке 808 вместе с соответствующими значениями x1, x2 и x3. Затем на основе этой информации можно вычислить отношения LLR в блоке 814 следующим образом:

Таким образом, в примере с созвездием для 64-QAM с тремя пространственными переданными потоками поиск может осуществляться по 3*64=192 расстояния для нахождения тех метрик расстояния, для которых k-й бит x1 равен 0, после чего может быть определен минимум

и т.д.
Нахождение минимума может осуществляться по большому количеству метрик расстояния, например, путем представления минимальных метрик расстояния в виде двоичных чисел и сканирования каждого числа от старшего значащего бита (MSB) до младшего значащего бита (LSB). Если среди метрик расстояния биты на текущей сканируемой битовой позиции различаются, то тогда метрики расстояния, имеющие битовое значение «1» на текущей сканируемой битовой позиции, могут быть помечены и исключены из рассмотрения как минимальные. По достижении бита LSB в качестве минимальной метрики расстояния может быть использован единственный оставшийся подходящая метрика или любой из оставшихся подходящих метрик (при наличии множества оставшихся подходящих метрик). В другом примере указанный алгоритм поиска минимума может быть применен в блоке 810 к поискам минимума, необходимым для вычисления аппроксимированных отношений LLR следующим образом. Сначала, для поиска минимума по всем d(x1,x2,x3) при условии, что бит bk для x1 равен 0, все метрики расстояния, для которых бит bk для x1 равен 1, могут быть помечены и при поиске минимума исключены из рассмотрения. Аналогичным образом, при поиске минимума по всем d(x1,x2,x3) при условии, что bk для x1 равен 1, все метрики расстояния, для которых бит bk для x1 равен 0, также могут быть при поиске минимума помечены и исключены из рассмотрения.
Обратимся теперь к фиг.9, где представлена блок-схема, иллюстрирующая примерную систему 900 беспроводной связи, в которой могут быть реализованы один или несколько описанных здесь вариантов изобретения. В одном примере система 900 представляет собой систему с множеством входов и множеством выходов (MIMO), которая включает в себя передающую систему 910 и приемную систему 950. Однако следует иметь в виду, что передающая система 910 и/или приемная система 950 также могут использоваться в системе с множеством входов и одним выходом, где, например, множество передающих антенн (к примеру, на базовой станции) могут передавать один или несколько потоков символов на устройство с одной антенной (например, мобильную станцию). Вдобавок, следует учесть, что описанные здесь варианты передающей системы 910 и/или приемной системы 950 могут быть использованы применительно к системе с одной выходной и одной входной антенной.
Согласно одному варианту данные трафика для нескольких потоков данных подаются передающей системой 910 от источника 912 данных в процессор 914 данных передачи (TX). В одном примере каждый поток данных может затем быть передан через соответствующую передающую антенну 924. Вдобавок, процессор 914 данных TX может форматировать, кодировать и осуществлять чередование данных трафика для каждого потока данных на основе конкретной схемы кодирования, выбранной для каждого соответствующего потока данных, чтобы обеспечить кодированные данные. В одном примере кодированные данные для каждого потока данных могут затем мультиплексироваться с данными контрольного сигнала с использованием способов OFDM. Данные контрольного сигнала могут представлять собой, например, известную комбинацию данных, которая обрабатывается известным образом. Кроме того, данные контрольного сигнала могут быть использованы приемной системой 950 для оценки канальной характеристики. В передающей системе 910 мультиплексированные контрольного сигнала и кодированные данные для каждого потока данных могут быть подвергнуты модуляции (то есть отображение символов) на основе конкретной схемы модуляции (например, BPSK, QPSK, M-PSK или M-QAM), выбранной для каждого соответствующего потока данных, чтобы обеспечить модуляционные символы. В одном примере скорость передачи данных, схемы кодирования и модуляции для каждого потока данных могут определяться инструкциями, выполняемыми и/или обеспечиваемыми процессором 930.
Далее модуляционные символы для всех потоков данных могут быть поданы в процессор 920 TX MIMO, который может выполнить дополнительную обработку модуляционных символов (например, для OFDM). Затем процессор 920 TX MIMO может подать NT потоков модуляционных символов на NT передатчиков (TMTR) c 922а по 922t. В одном примере каждый передатчик 922 может получать и обрабатывать соответствующий поток символов для создания одного или нескольких аналоговых сигналов. Затем каждый передатчик 922 может выполнять дополнительную нормализацию (например, усиление, фильтрацию и преобразование с повышением частоты) аналоговых сигналов для получения модулированного сигнала, подходящего для передачи по каналу MIMO. Соответственно, после этого NT модулированных сигналов от передатчиков с 992а по 922t могут быть переданы через NT антенн с 924а по 924t соответственно.
Согласно другому варианту переданные модулированные сигналы могут быть приняты в приемной системе 950 NR антеннами с 952а по 952r. Затем принятый от каждой антенны 952 сигнал может быть передан на соответствующий приемник (RCVR) 954. В одном примере каждый приемник 954 может выполнить нормализацию (например, фильтрацию, усиление и преобразование с понижением частоты) соответствующего принятого сигнала, оцифровать нормализованный сигнал для создания образцов, а затем обработать эти образцы для обеспечения соответствующего «принятого» потока символов. Процессор 960 данных RX MIMO может затем принять и обработать NR принятых потоков символов от NR приемников 954 на основе конкретного способа обработки приема для создания NT «обнаруженных» потоков символов. В одном примере каждый обнаруженный поток символов может включать в себя символы, являющиеся оценками модуляционных символов, переданных для соответствующего потока данных. Далее процессор 960 данных RX MIMO может затем обработать каждый поток символов, по меньшей мере частично, путем демодуляции, обратного чередования и декодирования каждого обнаруженного потока символов с целью восстановления информации для соответствующего потока данных. После успешного восстановления этот поток может быть передан в приемник 964 данных. Таким образом, обработка, выполняемая процессором 960 данных RX MIMO, может быть комплементарной по отношению к обработке, выполняемой процессором 920 TX MIMO и процессором 914 данных TX в передающей системе 910.
В другом примере процессор 960 данных RX MIMO может быть ограничен по количеству поднесущих, которые он может одновременно демодулировать. Например, процессор 960 данных RX MIMO может быть ограничен 512 поднесущими на частоте 5 МГц, 128 поднесущими на частоте 1,25 МГц или 256 поднесущими на частоте 2,5 МГц. В другом примере процессор 960 данных RX MIMO может быть ограничен 128 поднесущими на частоте 40 МГц и 64 поднесущими на частоте 29 МГц. Кроме того, для выполнения пространственно/временной обработки в приемнике настройки уровней мощности, изменения скоростей или схем модуляции и/или других соответствующих действий может быть использована оценка канальной характеристики, созданная процессором 960 данных RX MIMO. Вдобавок, процессор 960 данных RX MIMO может дополнительно оценить такие канальные характеристики, как, например, отношения «сигнал - шум плюс помехи» (SNR) для обнаруженных потоков символов. Затем процессор 960 данных RX MIMO может предоставить оценки канальных характеристик процессору 970. В одном примере процессор 960 данных RX MIMO и/или процессор 970 может, кроме того, получить оценку «рабочего» SNR для системы. Затем процессор 970 может обеспечить информацию о состоянии канала (CSI), которая может содержать информацию, касающуюся линии связи и/или принятого потока данных. Эта информация может включать в себя, например, рабочий SNR. Затем информация CSI может быт обработана процессором 978 данных TX (который может быть связан с источником 976 данных), модулирована модулятором 980, нормализована передатчиками с 954а по 954r и передана обратно в передающую систему 910.
В передающей системе 910 модулированные сигналы из системы 950 приема могут затем быть приняты антенной 924, нормализованы приемниками 922, демодулированы демодулятором 940 и обработаны процессором 942 данных RX для восстановления информации CSI, посланной приемной системой 950. После успешного восстановления поток может быть направлен в приемник 944 данных. В одном примере посланная информация CSI может быть затем направлена в процессор 930 и использована для определения скоростей передачи данных, а также схем кодирования и модуляции, подлежащих использованию для одного или нескольких потоков данных. Далее определенные схемы кодирования и модуляции могут быть предоставлены передатчику 922 для квантования и/или использования в последующих передачах на системы 950 приема. Вдобавок, и/или в альтернативном варианте, отправленная информация CSI может быть использована процессором 930 для создания различных управляющих воздействий для процессора 914 данных TX и процессора 920 данных TX MIMO.
В одном примере процессор 930 в передающей системе 910 и процессор 970 в системе 950 приема управляют работой соответствующих систем. Вдобавок, память 932 в передающей системе 910 и память 972 в системы 950 приема могут обеспечить хранение программных кодов и данных, используемых процессорами 930 и 970 соответственно. Кроме того, в системы 950 приема могут быть использованы различные способы обработки для обработки NR принятых сигналов с целью обнаружения NT переданных потоков символов. В одном примере эти способы обработки могут включать в себя одну или несколько методик 400, 500, 600, 700, 800 и/или любой другой подходящий способ для алгоритма «квази-SOMLD». Вдобавок, и/или как альтернативный вариант, способы обработки, используемые системы 950 приема могут включать в себя способы пространственной и пространственно-временной обработки приема, которые также могут называться способами выравнивания, и/или способами обработки приема типа «последовательное обращение в нуль незначащих коэффициентов/выравнивание и подавление помех», называемые также способами обработки приема типа «последовательное подавление помех» или «последовательное подавление».
На фиг.10 представлена блок-схема системы 1000, которая координирует модуляцию и передачу пространственных потоков данных согласно описанным здесь различным вариантам. В одном примере система 1000 включает в себя базовую станцию или точку 1002 доступа. Как показано на фиг.10, точка 1002 доступа может принимать сигнал (сигналы) от одного или нескольких терминалов 1004 доступа через антенну 1006 приема (Rx) и вести передачу на один или несколько терминалов 1004 доступа через передающую (Tx) антенну 1008.
Вдобавок, точка 1002 доступа может содержать приемник 1010, который принимает информацию от приемной антенны 1006. В одном примере приемник 1010 может быть оперативно связан с демодулятором 1012, который демодулирует принятую информацию. Затем демодулированные символы могут быть проанализированы процессором 1014. Процессор 1014 может быть связан с памятью 1016, в которой может храниться информация, относящаяся к кодовым кластерам, присваиваниям терминалов доступа, относящиеся к ним поисковые таблицы, уникальные скремблирующие последовательности и/или информация других подходящих типов. В одном примере в точке 1002 доступа может использоваться демодулятор 1012 и/или процессор 1014 для выполнения методик 400, 500, 600, 700, 800 и/или других аналогичных и подходящих для этого методик. Точка 1002 доступа может также включать в себя модулятор 1018, который может мультиплексировать сигнал для передачи передатчиком 1020 через передающую антенну 1008 на один или несколько терминалов 1004 доступа.
На фиг.11 представлена блок-схема системы 1100, которая координирует прием и обнаружение пространственных потоков данных согласно описанным здесь различным вариантам. В одном примере система 1100 включает в себя терминал 1102 доступа. Как здесь показано, терминал 1102 доступа может принимать сигнал (сигналы) от одной или нескольких точек 1104 доступа и выполнять передачу на одну или несколько точек 1104 доступа через антенну 1108. Вдобавок, терминал 1102 доступа может содержать приемник 1110, который принимает информацию от антенны 1108. В одном примере приемник 1110 может быть оперативно связан с демодулятором 1112, который демодулирует принятую информацию. Затем демодулированные символы могут быть проанализированы процессором 1114. Процессор 1114 может быть связан с памятью 1116, в которой могут храниться данные и/или программные коды, относящиеся к терминалу 1102 доступа. Вдобавок, терминал 1102 доступа может использовать демодулятор 1112 и/или процессор 1114 для выполнения методик 400, 500, 600, 700, 800 и/или других аналогичных и подходящих для этого методик. Терминал 1102 доступа может также включать в себя модулятор 1118, который может мультиплексировать сигнал для передачи его передатчикам 1120 через антенну 1108 на одну или несколько точек 1104 доступа.
На фиг.12 показано устройство 1200, которое обеспечивает обнаружение результатов квазимягкого решения по методу максимального правдоподобия. Следует учесть, что устройство 1200 представлено в виде, включающем в себя функциональные блоки, которые могут представлять функции, реализуемые процессором, программными средствами или их комбинацией (например, программно-аппаратными средствами). Устройство 1200 может быть реализовано в базовой станции (например, AP 210) и/или терминале (например, AT 220) и может включать в себя модуль 1202 для выполнения цикла по точкам созвездия для каждого переданного пространственного потока с целью оценки других элементов с использованием субоптимального алгоритма MIMO. Кроме того, устройство 1200 может включать в себя модуль 1204 для определения метрик расстояния для потоков по точкам созвездия и модуль 1206 для получения результатов мягкого решения для каждого бита в переданных потоках на основе определенных метрик расстояния.
На фиг.13 показано устройство 1300, которое обеспечивает обнаружение квазимягких результатов по методу максимального правдоподобия посредством предварительной обработки канальной матрицы MIMO и использования субоптимальных алгоритмов MIMO. Следует учесть, что устройство 1300 представлено в виде, включающем в себя функциональные блоки, которые могут представлять функции, реализуемые процессором, программными средствами или их комбинацией (например, программно-аппаратными средствами). Устройство 1300 может быть реализовано в базовой станции (например, AP 210) и/или терминале (например, AT 220) и может включать в себя модуль 1302 для выполнения предварительной обработки канальной матрицы MIMO с использованием QR-разложения и/или других подходящих способов предварительной обработки. Кроме того, устройство 1300 может содержать модуль 1304 для выполнения цикла по точкам созвездия для каждого переданного пространственного потока с целью оценки других элементов с использованием субоптимального алгоритма MIMO на основе одного или нескольких из следующих алгоритмов: PSLD, LRD и/или алгоритма направленного поиска по М точкам; модуль 1306 для определения метрик расстояния для потоков по точкам созвездия; и модуль 1308 для получения результатов мягкого решения путем вычисления логарифмических отношений правдоподобия для каждого бита в переданных потоках на основе, по меньшей мере, частично определенных метрик расстояния.
На фиг.14 показано устройство 1400, которое обеспечивает обнаружение квазимягких результатов по методу максимального правдоподобия с улучшенным использованием метрик. Следует учесть, что устройство 1400 представлено в виде, включающем в себя функциональные блоки, которые могут представлять функции, реализуемые процессором, программными средствами или их комбинацией (например, программно-аппаратными средствами). Устройство 1400 может быть реализовано в базовой станции (например, AP 210) и/или терминале (например, AT 220) и может включать в себя модуль 1402 для запоминания массивов начальных метрик расстояния для набора точек созвездия на каждый переданный пространственный поток. Кроме того, устройство 1400 может содержать модуль 1404 для выполнения цикла по точкам созвездия для каждого переданного пространственного потока с целью оценки других элементов с использованием субоптимального алгоритма MIMO, модуль 1406 для определения метрик расстояния для потоков и оцененных других элементов по точкам созвездия, модуль 1408 для запоминания метрик расстояния для пространственных потоков и других оцененных элементов вместо соответствующих метрик расстояния, имеющих более высокое значение, для соответствующих точек созвездия, и модуль 1410 для получения результатов мягкого решения для каждого бита в переданных потоках на основе сохраненных метрик расстояния.
Должно быть ясно, что описанные здесь варианты могут быть реализованы аппаратными средствами, программными средствами, программно-аппаратными средствами, межплатформенным программным обеспечением, микрокодом или любой их комбинацией. Когда системы и/или способы реализованы программными средствами, программно-аппаратными средствами, межплатформенным программным обеспечением или микрокодом, программным кодом или кодовыми сегментами, они могут храниться на считываемом машиной носителе, таком как компонента памяти. Кодовый сегмент может представлять процедуру, функцию, подпрограмму, программу, стандартную программу, стандартную подпрограмму, модуль, программный пакет, класс или любую комбинацию инструкций, структур данных или программных операторов. Кодовый сегмент может быть связан с другим кодовым сегментом или аппаратной схемой посредством передачи и/или приема информации, данных, аргументов, параметров или содержимого памяти. Информация, аргументы, параметры, данные и т.д. могут передаваться, направляться или пересылаться с использованием любых подходящих средств, включая совместное использование памяти, передачу сообщений, маркерную передачу, сетевую передачу и т.д.
При программной реализации описанные здесь способы могут быть реализованы с помощью модулей (например, процедуры, функции и т.п.), которые выполняют описанные здесь функции. Программные коды могут храниться в блоках памяти и выполняться процессорами. Блок памяти может быть реализован в процессоре или вне процессора, и тогда он может быть связан линией передачи с процессором с использованием различных средств, известных специалистам в данной области техники.
Вышеприведенное описание включает в себя примеры одного или нескольких вариантов осуществления изобретения. Конечно, невозможно описать каждую возможную комбинацию компонент или методик в целях описания вышеупомянутых вариантов, но специалистам в данной области техники должны быть очевидны многие другие комбинации и перестановки различных вариантов. Соответственно, подразумевается, что описанные варианты охватывают все указанные изменения, модификации и вариации, которые не выходят за рамки существа и объема прилагаемой формулы изобретения. Кроме того, подразумевается, что используемый в подробном описании или формуле изобретения термин «включает в себя» является инклюзивным, аналогичным термину «содержащий», в то время как термин «содержащий» трактуется в качестве переходного слова при его использовании в формуле изобретения. Кроме того, используемый в подробном описании формулы изобретения термин «или» означает «не исключающее или».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДЕТЕКТИРОВАНИЯ СИГНАЛА В СИСТЕМАХ СВЯЗИ С MIMO КАНАЛОМ | 2012 |
|
RU2488963C1 |
| УСОВЕРШЕНСТВОВАННЫЙ СПОСОБ ДЕКОДИРОВАНИЯ В СИСТЕМЕ МНОГОАНТЕННОЙ ПРИЕМОПЕРЕДАЧИ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2426255C2 |
| СПОСОБ ПРИЕМА СИГНАЛА В СИСТЕМЕ СВЯЗИ С НЕСКОЛЬКИМИ КАНАЛАМИ ПЕРЕДАЧИ И ПРИЕМА | 2006 |
|
RU2303330C1 |
| СФЕРИЧЕСКОЕ ОБНАРУЖЕНИЕ И ВЫБОР СКОРОСТИ ДЛЯ ПЕРЕДАЧИ MIMO | 2007 |
|
RU2423012C2 |
| СПОСОБ ДЕТЕКТИРОВАНИЯ СИГНАЛА В СИСТЕМАХ СВЯЗИ С MIMO КАНАЛОМ | 2010 |
|
RU2444846C1 |
| ДЕТЕКТИРОВАНИЕ И ДЕКОДИРОВАНИЕ С УМЕНЬШЕННОЙ СЛОЖНОСТЬЮ ДЛЯ ПРИЕМНИКА В СИСТЕМЕ СВЯЗИ | 2006 |
|
RU2414062C2 |
| СИСТЕМА И СПОСОБ БЕСПРОВОДНОЙ СВЯЗИ С РАСПРЕДЕЛЕННЫМИ ВХОДАМИ И РАСПРЕДЕЛЕННЫМИ ВЫХОДАМИ | 2011 |
|
RU2578206C2 |
| СИСТЕМА И СПОСОБ БЕСПРОВОДНОЙ СВЯЗИ С РАСПРЕДЕЛЁННЫМИ ВХОДАМИ И РАСПРЕДЕЛЁННЫМИ ВЫХОДАМИ | 2016 |
|
RU2700568C2 |
| ИЕРАРХИЧЕСКОЕ КОДИРОВАНИЕ С ИСПОЛЬЗОВАНИЕМ МНОЖЕСТВА АНТЕНН В СИСТЕМЕ РАДИОСВЯЗИ | 2004 |
|
RU2316900C1 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ МНОЖЕСТВЕННОГО ДОСТУПА С РАЗРЕЖЕННЫМ КОДОМ | 2013 |
|
RU2603280C1 |
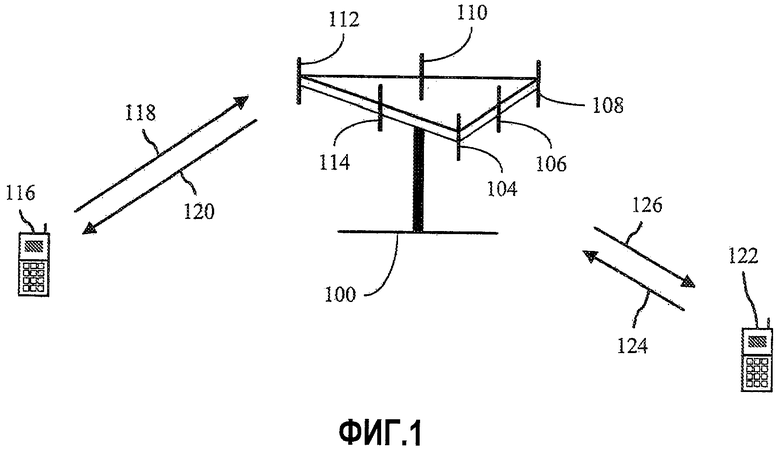
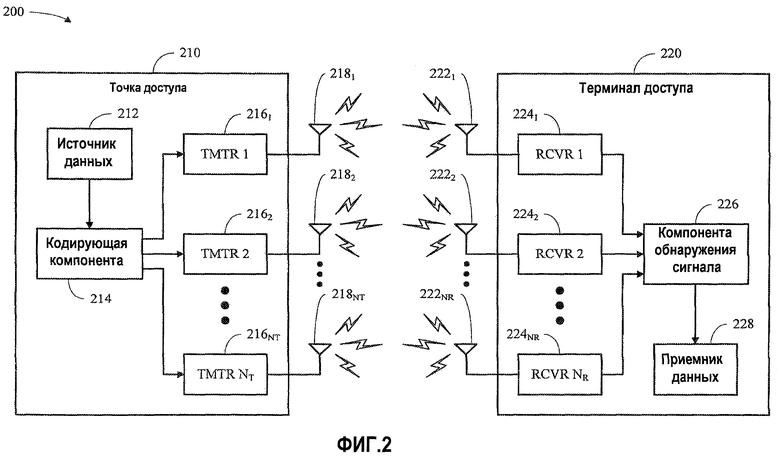
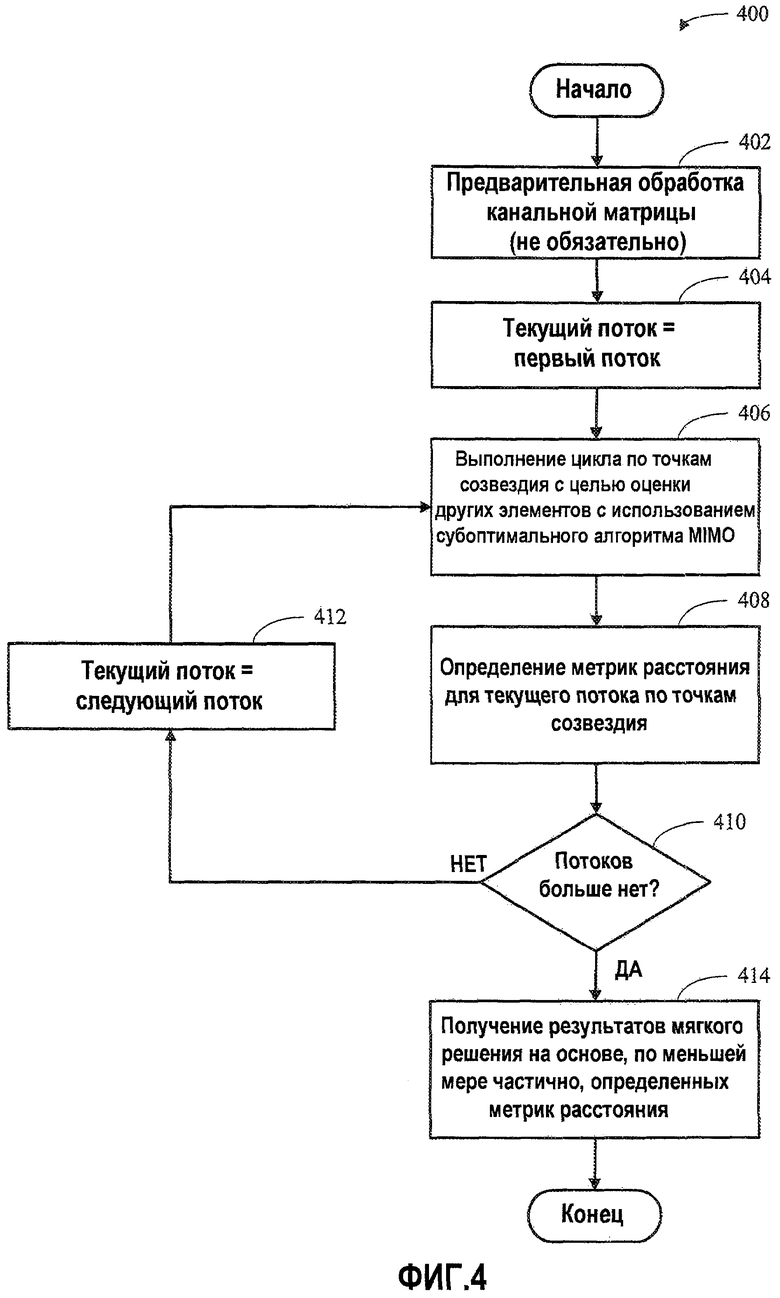
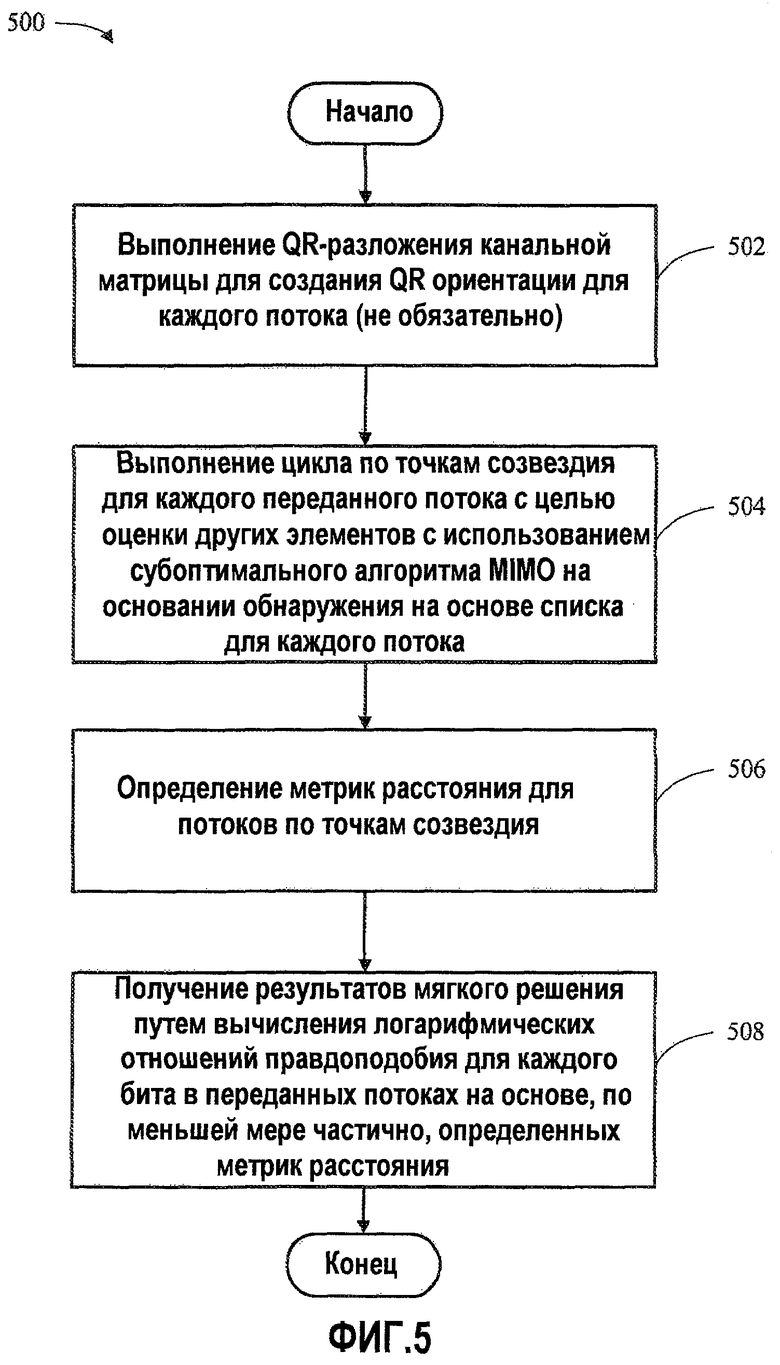
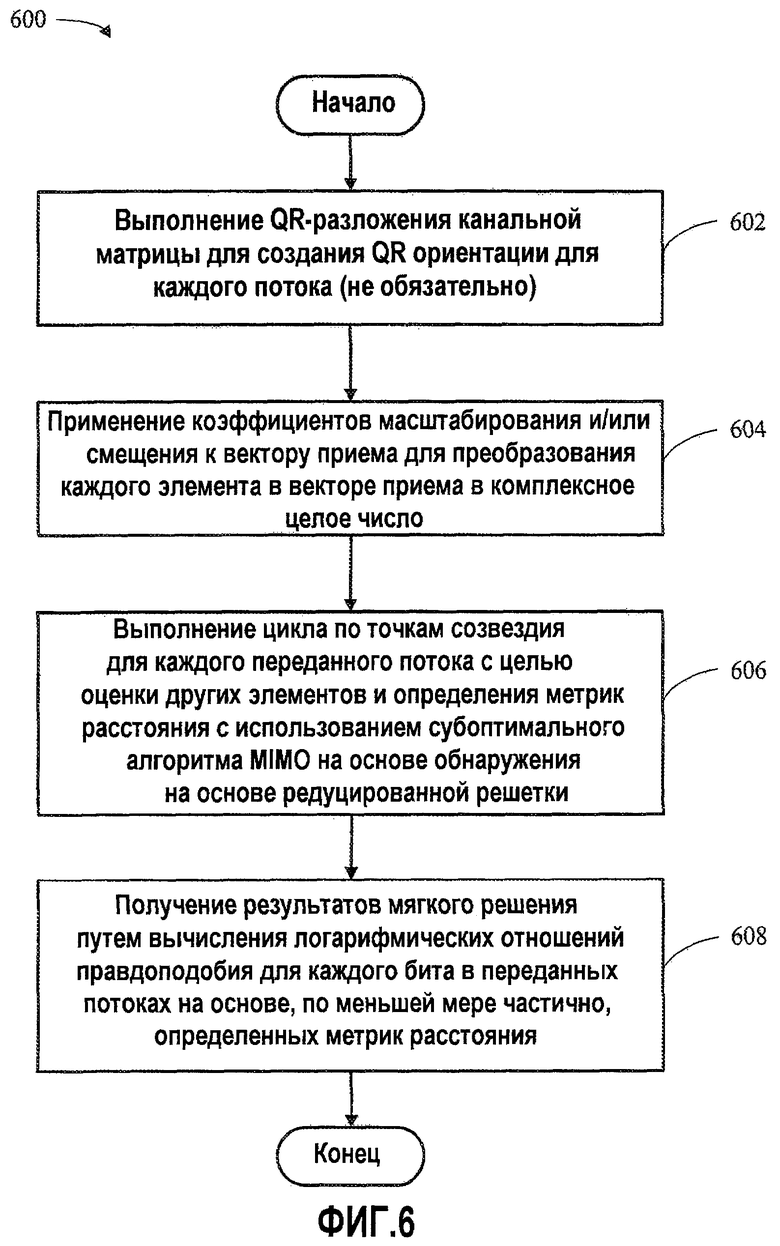
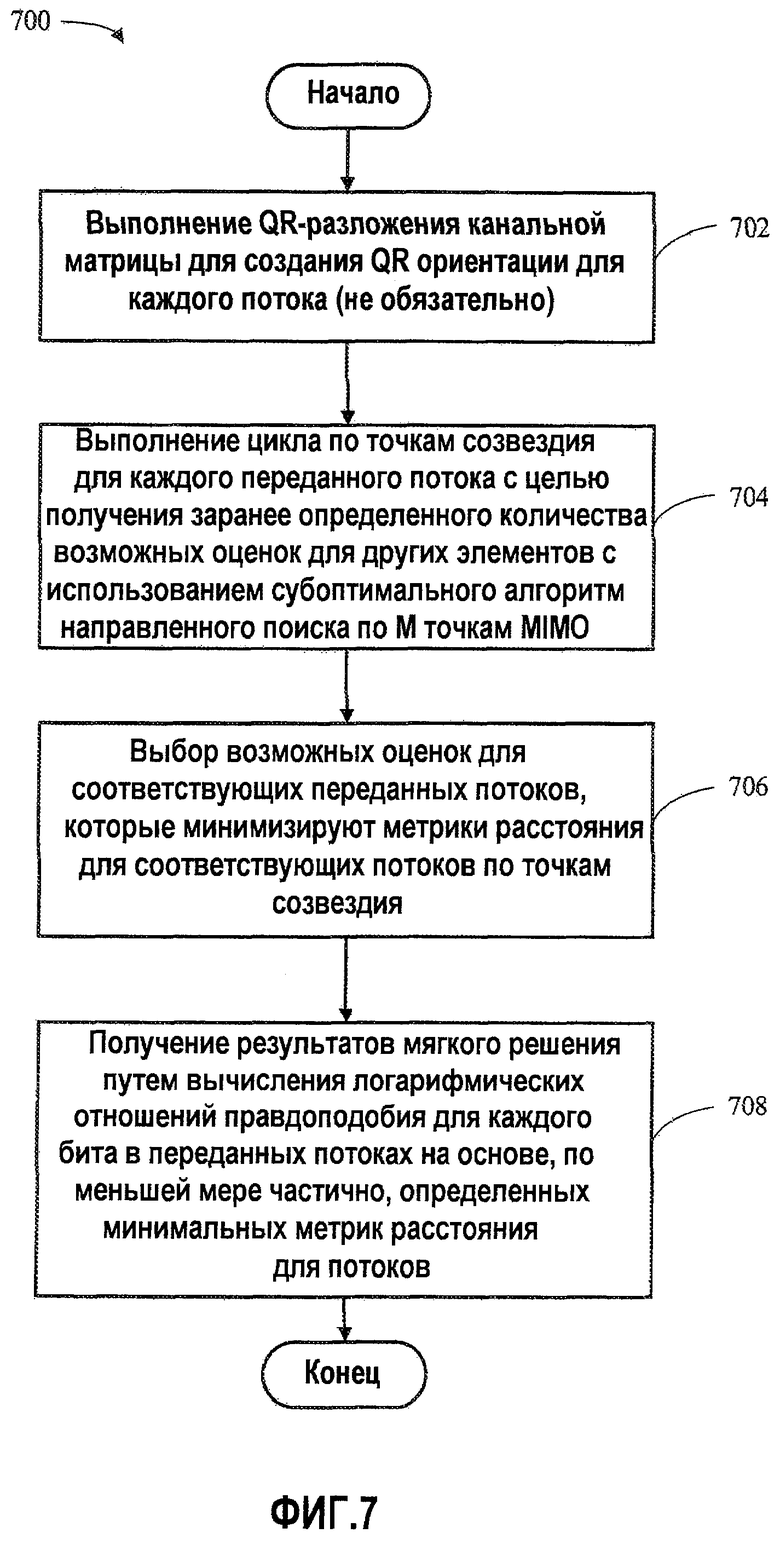
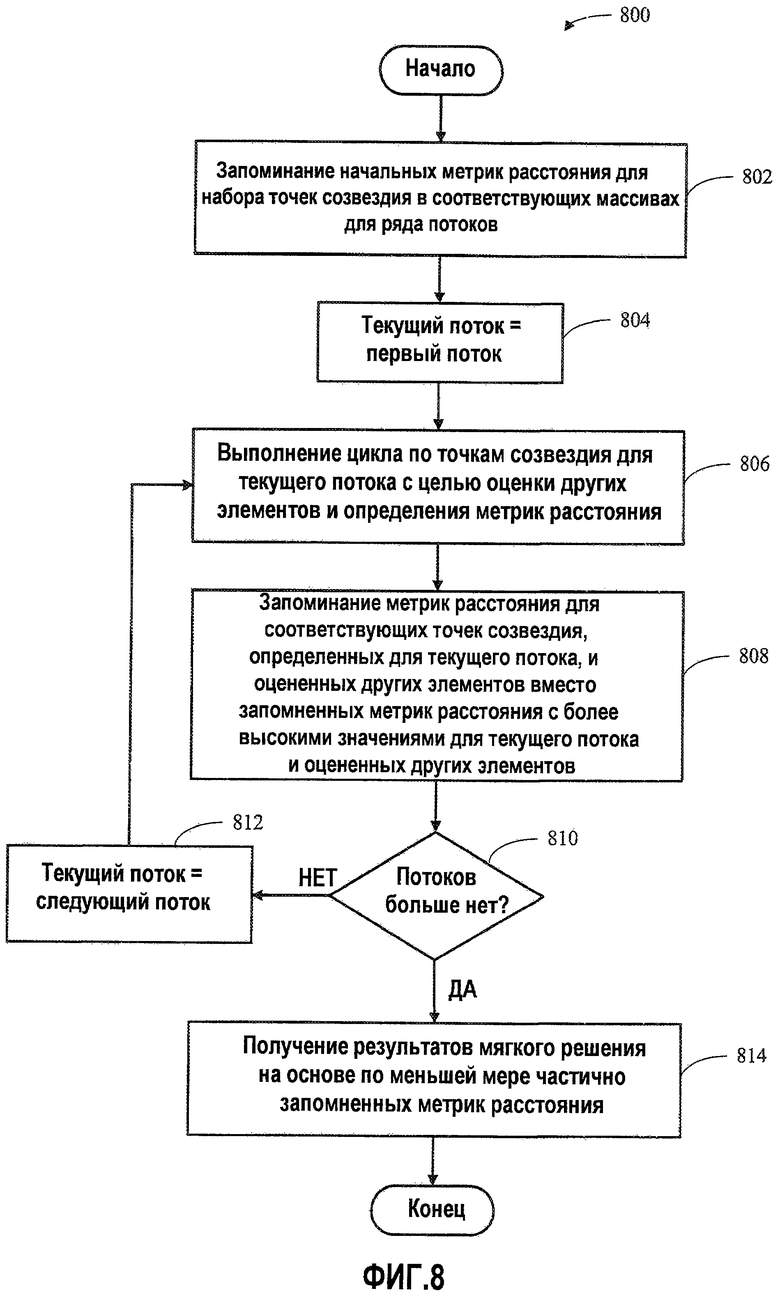
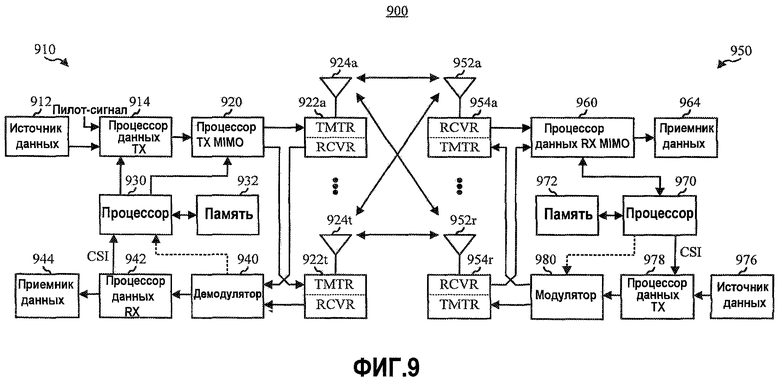
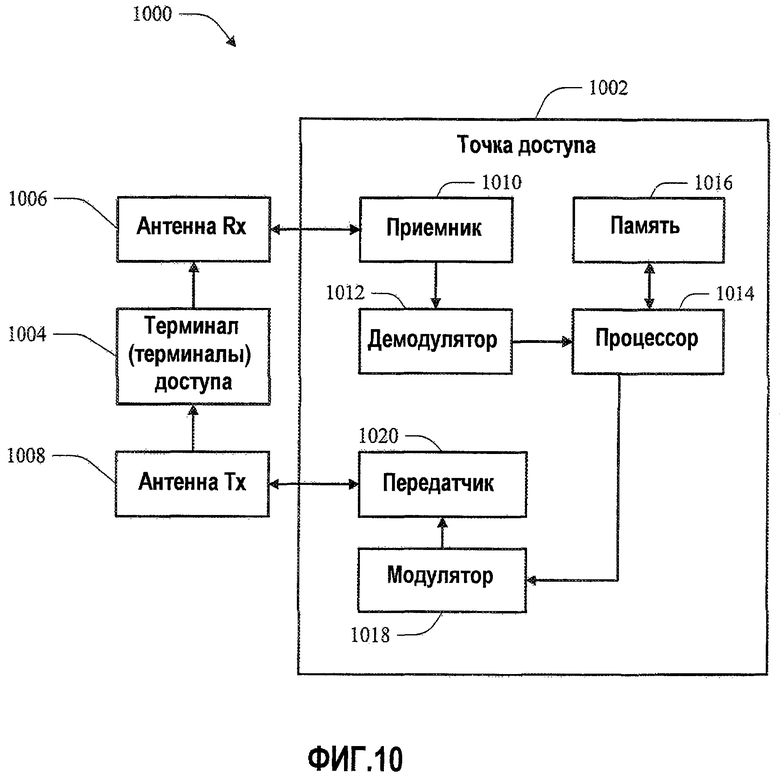
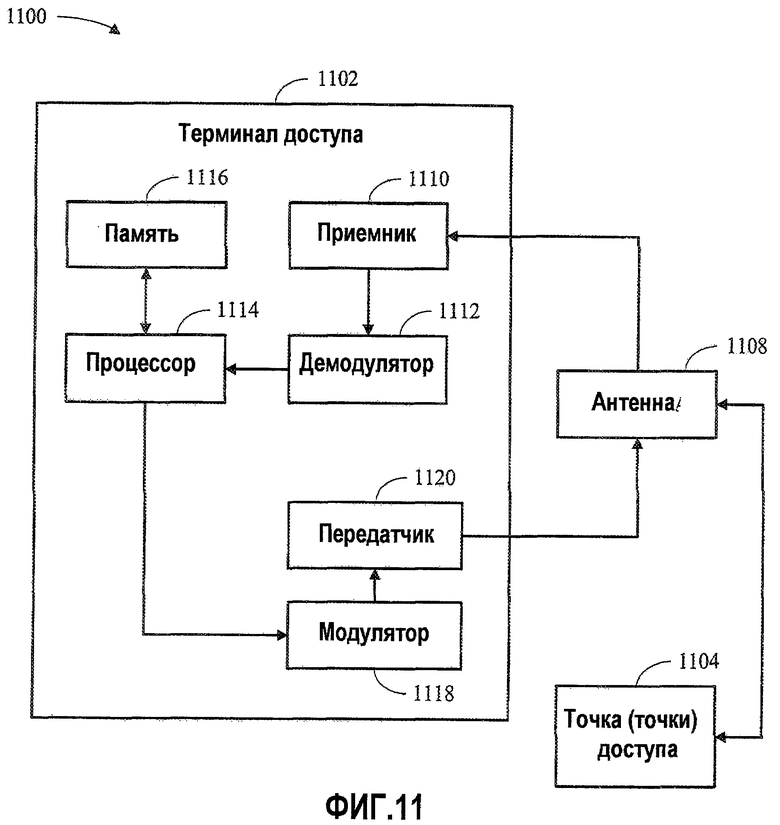
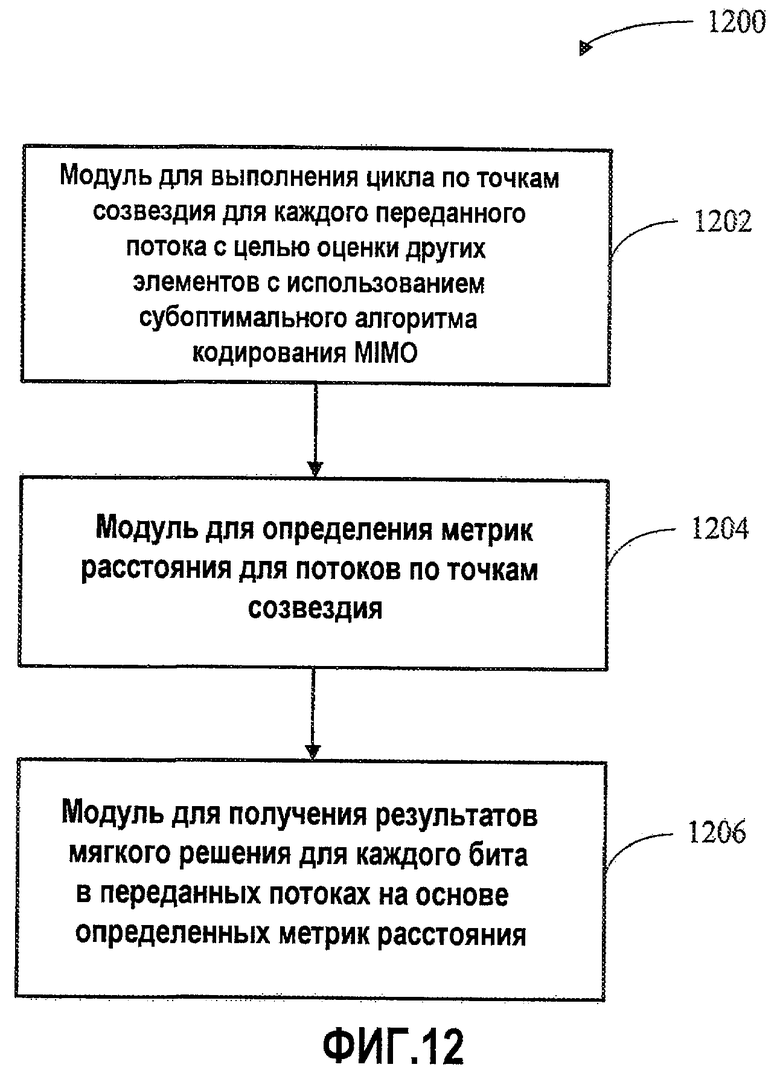
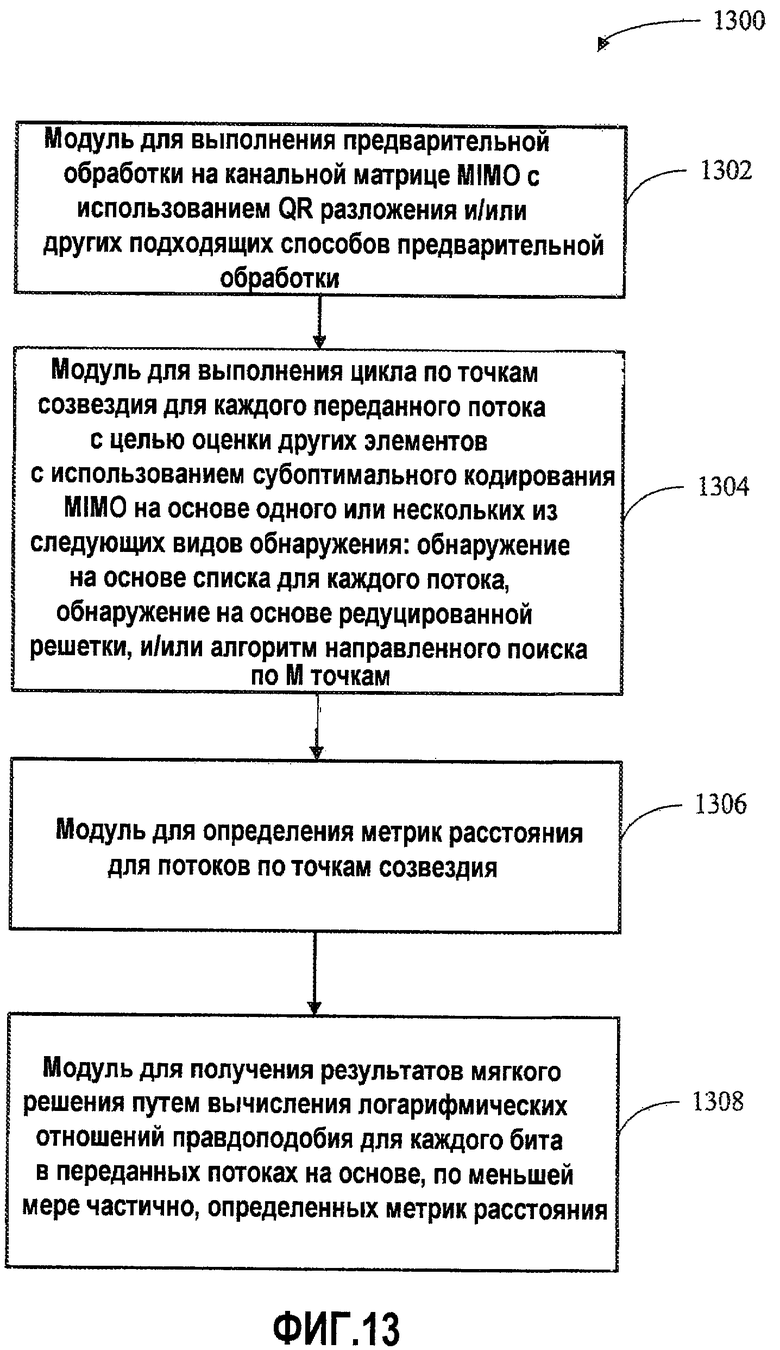
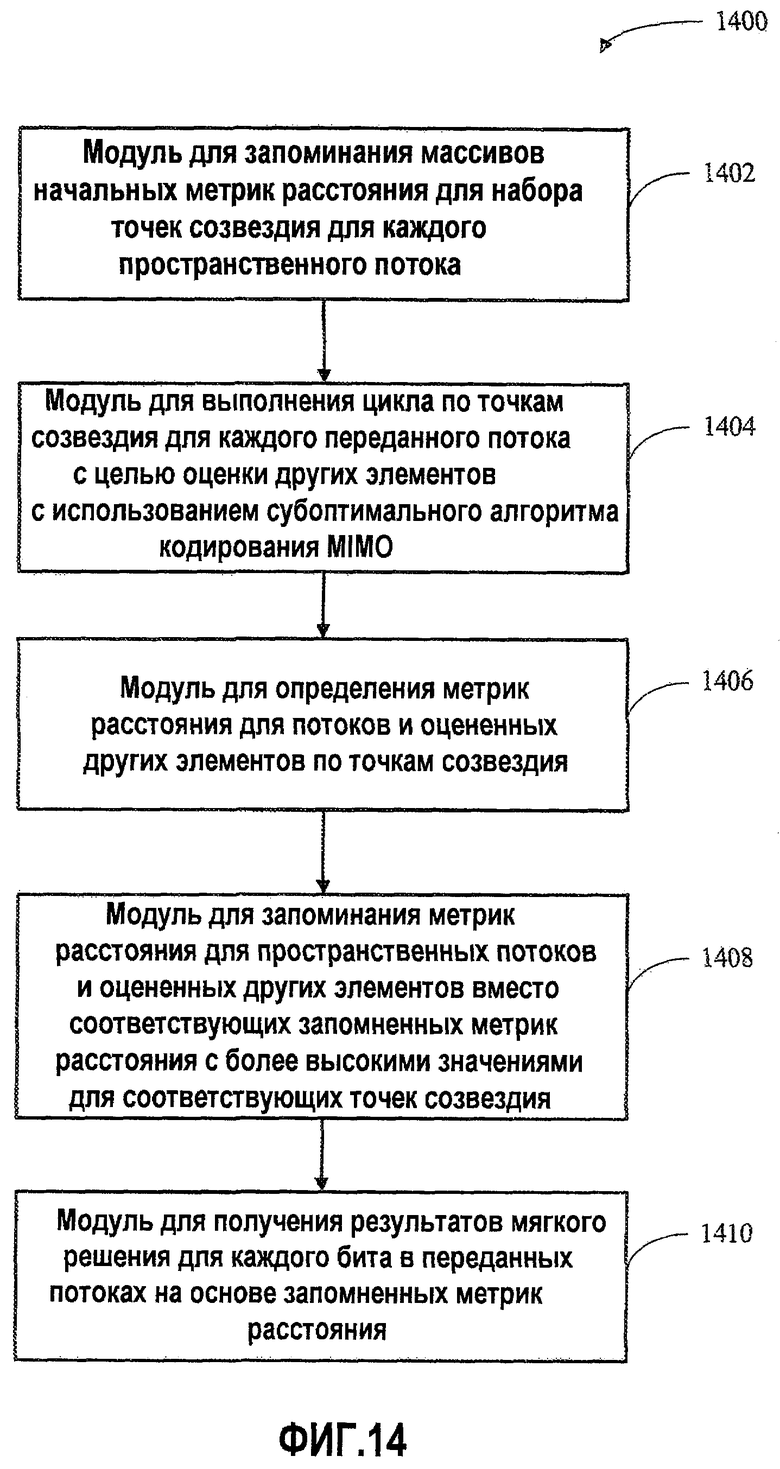
Заявленное изобретение относится к беспроводной связи. Техническим результатом является несложное обнаружение мягкого решения для систем связи MIMO. Для этого может быть выполнен цикл по набору точек созвездия для каждого пространственного потока с целью получения метрик расстояния для каждого потока в ряду переданных потоков, значения которых для других переданных потоков можно оценить с использованием канальной матрицы MIMO и субоптимального алгоритма MIMO. Примеры алгоритмов MIMO, которые можно при этом использовать, включают в себя: обнаружение на основе списка для каждого потока (PSLD), обнаружение на основе редуцированной решетки (LRD) и алгоритм направленного поиска по М точкам. Дополнительное повышение эффективности может быть достигнуто с помощью предварительной обработки канальной матрицы MIMO и/или путем применения способов для улучшенного использования метрик (EMU). 9 н. и 51 з.п. ф-лы, 14 ил., 1 табл.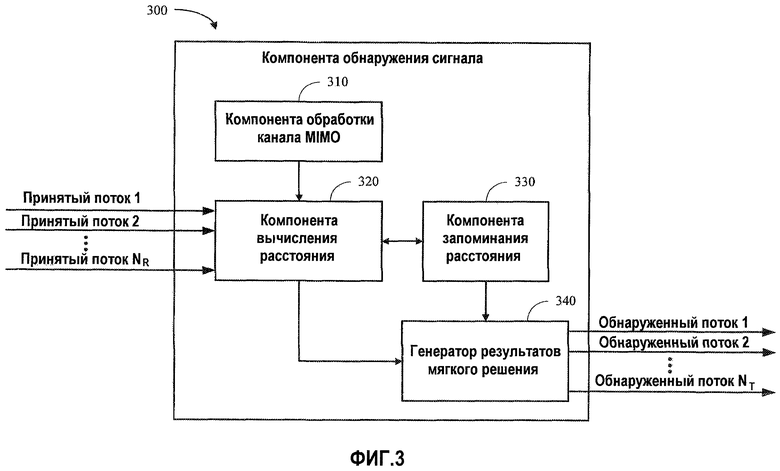
1. Способ создания результирующих значений мягкого решения для набора переданных пространственных потоков в системе связи с множеством входов и множеством выходов (MIMO), содержащий:
выполнение цикла по набору переданных пространственных потоков и для соответствующего переданного пространственного потока;
определение множества точек созвездия для соответствующего переданного пространственного потока для оценки значений для точек созвездия других переданных потоков, по меньшей мере частично, на основе субоптимального алгоритма MIMO, без выполнения цикла по точкам созвездия других переданных потоков;
определение набора метрик расстояния в виде значений множества точек созвездия для соответствующего переданного пространственного потока; и
создание результатов мягкого решения для соответствующего переданного пространственного потока на основе, по меньшей мере частично, набора метрик расстояния.
2. Способ по п.1, в котором субоптимальный алгоритм MIMO основан по меньшей мере на обнаружении на основе списка для каждого потока (PSLD).
3. Способ по п.2, в котором субоптимальный алгоритм MIMO, основанный по меньшей мере на PSLD, включает в себя обращение в нуль незначащих коэффициентов с последующим вычислением помех.
4. Способ по п.1, в котором определение множества точек созвездия включает в себя:
применение по меньшей мере одного из: коэффициента масштабирования коэффициента смещения для канальной матрицы, которая представляет действующий канал MIMO, через который принимается набор переданных пространственных потоков, для преобразования соответствующих элементов в канальной матрице в комплексные целые числа; и
причем субоптимальный алгоритм MIMO основан по меньшей мере на обнаружении на основе редуцированной решетки (LRD).
5. Способ по п.1, в котором определение множества точек созвездия включает в себя:
получение заранее определенного количества оцененных подходящих значений для других переданных пространственных потоков с использованием субоптимального алгоритма направленного поиска по М точкам; и
выбор оцененных подходящих значений для соответствующих других переданных потоков, которые минимизируют соответствующие метрики расстояния для соответствующих переданных пространственных потоков по набору точек созвездия.
6. Способ по п.1, дополнительно содержащий разложение канальной матрицы, которая представляет действующий канал MIMO, через который принимают набор Nt переданных пространственных потоков, причем при определении множества точек созвездия оценивают значения для других переданных пространственных потоков с использованием разложенной канальной матрицы.
7. Способ по п.6, в котором разложение канальной матрицы включает в себя выполнение QR разложения канальной матрицы.
8. Способ по п.1, дополнительно содержащий:
запоминание начальных метрик расстояния для набора точек созвездия для набора переданных пространственных потоков, где определение набора метрик расстояния включает в себя:
определение метрик расстояния в виде значений множества точек созвездия для соответствующих наборов переданных пространственных потоков и соответствующих оцененных значений для других переданных пространственных потоков,
запоминание метрик расстояния для соответствующих наборов переданных пространственных потоков и соответствующих оцененных значений для других переданных пространственных потоков вместо запомненных метрик расстояния с более высокими значениями для соответствующих наборов переданных пространственных потоков и соответствующих оцененных значений для других переданных пространственных потоков; и
создание результатов мягкого решения включает в себя создание результатов мягкого решения для соответствующих переданных пространственных потоков на основе, по меньшей мере частично, запомненных метрик расстояния.
9. Способ по п.1, дополнительно содержащий создание результатов жесткого решения для соответствующего переданного пространственного потока на основе, по меньшей мере частично, созданных результатов мягкого решения.
10. Способ по п.1, дополнительно содержащий:
создание результатов жесткого решения для соответствующего переданного пространственного потока путем поиска минимальной метрики расстояния для переданного пространственного потока в соответствующих переданных потоках; и
получение результатов жесткого решения для переданного пространственного потока и соответствующих оценок для других соответствующих переданных пространственных потоков на основе, по меньшей мере частично, обратного отображения созвездия.
11. Способ по п.1, в котором набор метрик расстояния содержит входные значения мягкого решения, представляющие соответственно оцененные значения переданного пространственного потока.
12. Способ по п.11, в котором входные значения мягкого решения создаются декодером с использованием внешнего кода.
13. Способ по п.1, в котором определение набора метрик расстояния включает в себя определение набора метрик расстояния в виде значений множества точек созвездия для соответствующего переданного пространственного потока с использованием по меньшей мере одной из следующих: аппроксимированной 11-нормы, 11-нормы, 12-нормы и 1∞-нормы.
14. Способ по п.1, в котором создание результатов мягкого решения для соответствующего переданного пространственного потока включает в себя вычисление логарифмических отношений правдоподобия для соответствующих битов в переданных потоках на основе, по меньшей мере частично, набора метрик расстояния.
15. Способ по п.1, в котором соответствующий переданный пространственный поток модулируют с использованием фазовой манипуляции (PSK).
16. Способ по п.1, в котором соответствующий переданный пространственный поток модулируют с использованием квадратурной амплитудной модуляции (QAM).
17. Способ по п.1, в котором набор переданных пространственных потоков распределяют среди множества поднесущих с использованием мультиплексирования с ортогональным частотным разделением (OFDM), при этом:
определение включает в себя определение множества точек созвездия для соответствующего переданного пространственного потока, распределенного по соответствующим поднесущим,
определение набора метрик расстояния включает в себя определение метрик расстояния для соответствующего переданного пространственного потока, распределенного по соответствующим поднесущим, и
создание результатов мягкого решения включает в себя создание результатов мягкого решения для соответствующего переданного пространственного потока, распределенного по соответствующим поднесущим.
18. Способ по п.1, в котором определение множества точек созвездия включает в себя определение на основе одного или более из: обращение в нуль незначащих коэффициентов и/или алгоритм на основе минимальной среднеквадратической ошибки.
19. Способ по п.1, в котором определение множества точек созвездия включает в себя определение множества точек созвездия для соответствующих субнаборов набора переданных пространственных потоков для оценки значений для переданных пространственных потоков, не входящих в соответствующие субнаборы, на основе субоптимального алгоритма MIMO.
20. Устройство беспроводной связи, содержащее:
память, которая запоминает данные, относящиеся к набору принятых потоков, и матрицу, соответствующую каналу, через который был передан набор переданных пространственных потоков, соответствующих набору принятых потоков; и
процессор, сконфигурированный для выполнения цикла по набору переданных пространственных потоков и для соответствующего пространственного потока, для определения одной или нескольких точек созвездия для соответствующего переданного потока, для определения оцененных значений для точек созвездия других переданных потоков и соответствующих метрик расстояния с использованием матрицы и субоптимального алгоритма MIMO без выполнения цикла по точкам созвездия других переданных потоков и создания результатов мягкого решения для соответствующего переданного потока в виде логарифмических отношений правдоподобия определенных метрик расстояния.
21. Устройство беспроводной связи по п.20, в котором процессор дополнительно сконфигурирован для определения одной или нескольких точек созвездия для соответствующего переданного пространственного потока для определения оцененных значений для других переданных пространственных потоков и соответствующих метрик расстояния с использованием матрицы и субоптимального алгоритма MIMO на основании обнаружения на основе списка для каждого потока (PSLD).
22. Устройство беспроводной связи по п.20, в котором процессор дополнительно сконфигурирован:
для выполнения по меньшей мере одной операции:
масштабирования и/или смещения по матрице для преобразования матрицы в комплексное целочисленное представление; и
для определения оцененных значений для других переданных пространственных потоков и соответствующих метрик расстояния с использованием матрицы и субоптимального алгоритма MIMO на основе обнаружения на основе редуцированной решетки (LRD).
23. Устройство беспроводной связи по п.20, в котором процессор дополнительно сконфигурирован:
для определения одной или нескольких точек созвездия для соответствующего переданного потока для получения заранее определенного количества оцененных подходящих значений для других переданных пространственных потоков и соответствующих метрик расстояния с использованием матрицы и алгоритма направленного поиска по М точкам MIMO; и
для выбора оцененных подходящих значений для соответствующих других переданных пространственных потоков, имеющих минимальные соответствующие метрики расстояния для соответствующего переданного пространственного потока по набору точек созвездия.
24. Устройство беспроводной связи по п.20, в котором процессор дополнительно сконфигурирован:
для обработки матрицы с использованием какого-нибудь способа разложения матрицы; и
для определения оцененных значений для других переданных пространственных потоков и соответствующих метрик расстояния с использованием обработанной матрицы и субоптимального алгоритма MIMO.
25. Устройство беспроводной связи по п.24, в котором процессор дополнительно сконфигурирован для обработки матрицы с использованием QR разложения.
26. Устройство беспроводной связи по п.20, в котором:
память дополнительно запоминает данные, относящиеся к соответствующим массивам, для хранения метрик расстояния для набора переданных пространственных потоков по одной или нескольким точкам созвездия; и
процессор дополнительно сконфигурирован:
для запоминания начальных метрик расстояния для набора переданных пространственных потоков по одной или нескольким точкам созвездия в соответствующих массивах/для определения оцененных значений для других переданных пространственных потоков и соответствующих метрик расстояния/для запоминания в соответствующих массивах соответствующих метрик расстояния в соответствующих массивах для наборов соответствующих переданных пространственных потоков и оцененных значений для других переданных пространственных потоков вместо соответствующих запомненных метрик расстояния с более высокими значениями; и
для создания результатов мягкого решения для соответствующих переданных пространственных потоков в виде отношений логарифмического правдоподобия запомненных метрик расстояния.
27. Устройство беспроводной связи по п.20, в котором процессор дополнительно сконфигурирован для создания результатов жесткого решения для соответствующих переданных пространственных потоков на основе определенных метрик расстояния.
28. Устройство беспроводной связи по п.20, в котором память дополнительно запоминает данные, относящиеся к входным значениям мягкого решения для набора принятых потоков.
29. Устройство беспроводной связи по п.20, в котором процессор дополнительно сконфигурирован для определения метрик расстояния с использованием по меньшей мере одной из следующих: аппроксимированной 11-нормы, 11-нормы, 12-нормы и 1∞-нормы.
30. Устройство беспроводной связи по п.20, в котором принятые потоки модулируют с использованием одной или более из следующих видов модуляции: PSK и/или QAM.
31. Устройство беспроводной связи по п.20, в котором:
память дополнительно запоминает данные, относящиеся к соответствующим частотным поднесущим, имеющим распределенные для
них принятые потоки на основе OFDM; и
процессор дополнительно сконфигурирован для создания результатов мягкого решения для соответствующего переданного
пространственного потока для соответствующих частотных поднесущих.
32. Система беспроводной связи, содержащая устройство беспроводной связи по п.20.
33. Устройство беспроводной связи, содержащее:
средство для выполнения цикла по набору переданных пространственных потоков и для соответствующего переданного пространственного потока, используя:
средство для определения набора точек созвездия для соответствующего переданного пространственного потока для оценки значений для точек созвездия других переданных потоков, используя субоптимальный алгоритм MIMO без выполнения цикла по точкам созвездия других переданных потоков;
средство для определения метрик расстояния для соответствующего переданного пространственного потока по набору точек созвездия; и
средство для получения результатов мягкого решения для соответствующих битов в переданном пространственном потоке на основе определенных метрик расстояния.
34. Устройство беспроводной связи по п.33, в котором субоптимальный алгоритм MIMO основан по меньшей мере на обнаружении на основе списка для каждого потока PSLD.
35. Устройство беспроводной связи по п.33, в котором средство для определения набора точек созвездия включает в себя:
средство для масштабирования и смещения канальной матрицы для преобразования соответствующих элементов в канальной матрице в комплексные целые числа; и
средство для оценки других значений с использованием канальной матрицы и субоптимального алгоритма MIMO на основании обнаружения на основе редуцированной решетки (LRD).
36. Устройство беспроводной связи по п.33, в котором средство для определения набора точек созвездия включает в себя:
средство для определения набора точек созвездия для соответствующих переданных пространственных потоков для создания оцененных подходящих значений для других значений с использованием субоптимального алгоритма направленного поиска по М точкам MIMO; и
средство для выбора соответствующих оцененных возможных значений для других значений, которые минимизируют соответствующие метрики расстояния для переданных пространственных потоков по набору точек созвездия.
37. Устройство беспроводной связи по п.33, дополнительно содержащее средство для обработки канальной матрицы на основе, по меньшей мере частично, QR разложения, где средство для определения набора точек созвездия включает в себя средство для оценки других значений с использованием канальной матрицы и субоптимального алгоритма MIMO.
38. Устройство беспроводной связи по п.33, дополнительно содержащее:
средство для запоминания начальных метрик расстояния для набора точек созвездия, которые соответствуют ряду переданных пространственных потоков; и
средство для определения метрик расстояния включает в себя:
средство для определения метрик расстояния для соответствующего переданного пространственного потока и соответствующих оцененных других значений по набору точек созвездия, и
средство для запоминания метрик расстояния для соответствующих наборов переданных пространственных потоков и оцененных других значений вместо соответствующих запомненных метрик расстояния, имеющих более высокое значение; и
средство для получения результатов мягкого решения включает в себя средство для получения результатов мягкого решения для соответствующих битов в переданных пространственных потоках на основе запомненных метрик расстояния.
39. Устройство беспроводной связи по п.33, в котором средство для получения результатов мягкого решения включает в себя средство для вычисления логарифмических отношений правдоподобия для соответствующих битов в переданных пространственных потоках на основе, по меньшей мере частично, определенных метрик расстояния.
40. Устройство беспроводной связи по п.33, в котором средство для оценки содержит средство для оценки других значений с использованием одного или более из следующего: обращение в нуль незначащих коэффициентов, обращение в нуль незначащих коэффициентов с последующим подавлением помех и/или алгоритм на основе минимальной среднеквадратической ошибки.
41. Устройство беспроводной связи по п.33, в котором средство для оценки содержит средство для оценки переданных пространственных потоков для оценки переданных потоков, не находящихся в соответствующих субнаборах, с использованием субоптимального алгоритма MIMO.
42. Система беспроводной связи, содержащая устройство по п.33, в котором система беспроводной связи содержит систему с множеством входов и множеством выходов.
43. Система беспроводной связи, содержащая устройство по п.33, в котором система беспроводной связи содержит систему многомодовой оптоволоконной связи.
44. Считываемый компьютером носитель, имеющий хранящиеся на нем исполняемые компьютером инструкции для создания мягких значений для набора переданных пространственных потоков в системе беспроводной связи, причем инструкции содержат:
код для выполнения цикла по набору переданных пространственных потоков и для соответствующего переданного пространственного потока;
код для использования канальной матрицы и субоптимального алгоритма MIMO для итеративного определения множества точек созвездия для соответствующего переданного пространственного потока для оценки значений для точек созвездия других переданных пространственных потоков, по меньшей мере, частично на основе суобптимального алгоритма MIMO без выполнения цикла по точкам созвездия других переданных потоков;
код для определения набора метрик расстояния как значений множества точек созвездия для соответствующего переданного пространственного потока; и
код для получения результатов мягкого решения для соответствующих битов в наборе переданных пространственных потоков на основе метрик расстояния.
45. Считываемый компьютером носитель по п.44, в котором код для использования канальной матрицы и субоптимального алгоритма MIMO включает в себя код для использования канальной матрицы и субоптимального алгоритма MIMO на основе, по меньшей мере частично, обнаружения на основе списка для каждого потока (PSLD).
46. Считываемый компьютером носитель по п.44, в котором код для использования канальной матрицы и субоптимального алгоритма MIMO включает в себя код для использования канальной матрицы и субоптимального алгоритма MIMO на основе, по меньшей мере частично, обнаружения на основе редуцированной решетки (LRD).
47. Считываемый компьютером носитель по п.44, в котором код для использования канальной матрицы и субоптимального алгоритма MIMO включает в себя:
код для итеративного использования канальной матрицы и субоптимального алгоритма MIMO по набору возможных точек созвездия для соответствующего переданного пространственного потока в наборе переданных потоков для оценки возможных значений для других переданных пространственных потоков в наборе переданных пространственных потоков; и
код для определения метрик расстояния, по меньшей мере частично, путем выбора соответствующих подходящих значений для других переданных пространственных потоков, которые минимизируют соответствующие метрики расстояния для соответствующего переданного пространственного потока по набору возможных точек созвездия.
48. Считываемый компьютером носитель по п.44, дополнительно содержащий код для обработки канальной матрицы на основе, по меньшей мере частично, QR разложения.
49. Считываемый компьютером носитель по п.44, в котором код для получения результатов мягкого решения включает в себя код для вычисления логарифмических отношений правдоподобия для соответствующих битов в наборе переданных пространственных потоков на основе метрик расстояния.
50. Считываемый компьютером носитель по п.44, дополнительно содержащий:
код для запоминания начальных метрик расстояния для набора возможных точек созвездия в наборе массивов, которые соответствуют набору переданных пространственных потоков,
где код для использования канальной матрицы и субоптимального алгоритма MIMO включает в себя:
код для выполнения итераций по соответствующему переданному пространственному потоку для оценки соответствующих других переданных пространственных потоков и определения соответствующих метрик расстояния; и
код для запоминания определенной метрики расстояния для точки созвездия в массиве, соответствующем переданному пространственному потоку или соответствующему оцененному потоку, если определенная метрика расстояния меньше, чем запомненная в массиве метрика расстояния для точки созвездия.
51. Процессор, который выполняет считываемые компьютером инструкции для несложного обнаружения результатов мягкого решения в приемнике MIMO, причем инструкции содержат:
код для выполнения цикла по набору переданных пространственных потоков и для соответствующего переданного пространственного потока;
код для определения множества точек созвездия для соответствующего переданного пространственного потока для оценки значений для точек созвездия других переданных пространственных потоков, по меньшей мере, частично, на основе субоптимального алгоритма MIMO без выполнения цикла по точкам созвездия для соответствующего переданного пространственного потока;
код для определения набора метрик расстояния как значений множества точек созвездия для соответствующего переданного пространственного потока; и
код для получения результатов жесткого решения для соответствующих битов в переданных пространственных потоках на основе метрик расстояния.
52. Процессор по п.51, в котором инструкции дополнительно содержат код для получения результатов мягкого решения путем вычисления логарифмических отношений правдоподобия для соответствующих битов в переданных пространственных потоках на основе метрик расстояния.
53. Процессор по п.51, в котором код для определения множества точек созвездия включает в себя код для использования субоптимального алгоритма MIMO на основе по меньшей мере одного из: обнаружение на основе списка для каждого потока, обнаружение на основе редуцированной решетки, алгоритм направленного поиска по М точкам, обращение в нуль незначащих коэффициентов и/или алгоритм на основе минимальной среднеквадратической ошибки.
54. Процессор по п.53, в котором инструкции, кроме того, содержат:
код для выполнения QR разложения канальной матрицы, которая представляет действующий канал MIMO, через который принимают переданные потоки,
где код для определения одной или нескольких точек включает в себя код для оценки других значений и для определения соответствующих метрик расстояния с использованием канальной матрицы и субоптимального алгоритма MIMO.
55. Процессор по п.53, в котором код для определения одной или нескольких точек созвездия включает в себя:
код для оценки других значений и для определения соответствующих метрик расстояния с использованием субоптимального алгоритма MIMO;
код для сравнения определенных соответствующих метрик расстояния с соответствующими запомненными метриками расстояния для переданных пространственных потоков и оцененных других значений; и
код для запоминания определенных соответствующих метрик расстояния вместо соответствующих запомненных метрик расстояния, значения которых выше, чем у определенных соответствующих метрик расстояния.
56. Способ создания результирующих значений мягкого решения для набора переданных пространственных потоков в системе связи, содержащий:
выполнение цикла по набору переданных пространственных потоков и для соответствующего переданного пространственного потока;
определение множества точек созвездия для соответствующего переданного пространственного потока для оценки значений для точек созвездия других переданных потоков, по меньшей мере частично, на основе алгоритма с одним входом и одним выходом (SISO) без выполнения цикла по точкам созвездия других переданных потоков;
определение набора метрик расстояния в виде значений множества точек созвездия для соответствующего переданного пространственного потока; и
создание результатов мягкого решения для соответствующего переданного пространственного потока на основе, по меньшей мере частично, набора метрик расстояния.
57. Способ по п.56, дополнительно содержащий создание результатов жесткого решения для соответствующего переданного пространственного потока на основе, по меньшей мере частично, созданных результатов мягкого решения.
58. Способ по п.56, дополнительно содержащий:
создание результатов жесткого решения для соответствующего переданного потока путем поиска минимальной метрики расстояния для переданного пространственного потока в соответствующих переданных пространственных потоках; и
получение результатов жесткого решения для переданного пространственного потока и соответствующих оценок для других соответствующих переданных пространственных потоков на основе, по меньшей мере частично, обратного отображения созвездия.
59. Способ по п.56, в котором набор метрик расстояния содержит входные значения мягкого решения, представляющие соответственно оцененные значения переданных пространственных потоков.
60. Способ по п.59, в котором входные значения мягкого решения создаются декодером с использованием внешнего кода.
| TIM C.W | |||
| SCHENK & ALLERT VAN ZELST: «Implementation of a MIMO OFDM-Based Wireless LAN System», стр.488-489 описания, найдено в Интернет 25.02.2011, размещено в Интернет по адресу: URL:http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.58.3043&rep=rep1&type=pdf | |||
| СПОСОБ ПРИЕМА СИГНАЛА В СИСТЕМЕ СВЯЗИ С НЕСКОЛЬКИМИ КАНАЛАМИ ПЕРЕДАЧИ И ПРИЕМА | 2006 |
|
RU2303330C1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

