Область техники, к которой относится изобретение
Изобретение относится к подъемному крюку, выполненному с возможностью захвата поднимаемого объекта за предусмотренную на нем цилиндрическую подъемную поверхность, причем подъемный крюк имеет ствол крюка, крюкообразную часть, соединенную со стволом крюка, запорный механизм для фиксации подъемного крюка к поднимаемому объекту, механизм управления, установленный над крюкообразной частью для вхождения в контакт с верхней частью подъемной поверхности с целью направления крюкообразной части в подъемное положение на нижнюю часть подъемной поверхности. В частности, изобретение относится к крюку, предназначенному для перемещения рулонов бумаги бумагоделательной машины на целлюлозно-бумажном комбинате, для чего обычно используются два крюка. Крюки прикреплены к концам грузонесущей балки, предназначенной для перемещения рулонов бумаги, и выполнены с возможностью вхождения в контакт с цилиндрическими подъемными поверхностями цилиндрических намоточных валов рулонов бумаги. Крюк также подходит для перемещения других объектов, имеющих цилиндрическую подъемную поверхность.
Уровень техники
Известные из уровня техники подъемные крюки описаны, например, в патентных документах США №2577790 A, №5114200 A и Японии №2001354388.
Подъемные крюки грузонесущей балки крана, используемого на целлюлозно-бумажном комбинате для подъема и перемещения рулонов бумаги, сначала направляются к проточкам цилиндрической подъемной поверхности, выполненным на концах намоточного вала рулона бумаги, затем крюки направляются в проточки с обеспечением их вхождения в контакт снизу с проточками подъемной поверхности валов, после чего крюки фиксируются к проточкам, и рулон бумаги может быть поднят и перемещен. Это может выполняться либо автоматизированно, либо с помощью ручного управления.
Недостаток описанного выше процесса перемещения рулона бумаги заключается в том, что, в частности, при автоматизированном управлении подъемом подъемный крюк не входит должным образом в контакт с проточкой подъемной поверхности, выходит из проточки или подается ложное подтверждение запирания крюка, даже если запирание крюка в требуемой точке запирания не произошло. Если рулон бумаги или один из его концов выходит из одного или обоих крюков при подъеме, может возникнуть серьезное повреждение. Как правило, например, при падении рулона на поддерживающую стойку с высоты более 10 см дорогостоящий намоточный вал рулона бумаги изгибается и становится непригодным. С другой стороны, при падении рулона на пол цеха целлюлозно-бумажного комбината вся конструкция пола может быть значительно повреждена на большой площади.
Автоматизированное управление подъемом, как правило, осуществляется с использованием информации от датчиков положения, установленных на подъемном крюке и возможно также на намоточном валу рулона бумаги, причем данная информация не всегда является абсолютно надежной. Поэтому обычно необходима ручная или визуальная проверка крепления, из-за чего на практике машинист крана часто вынужден проходить к месту и проверять крепление.
При ручном управлении подъемом машинист крана обычно пристегивает и фиксирует подъемные крюки к рулону бумаги вручную, из-за чего он вынужден все время перемещаться между краном и рулонами бумаги.
Из приведенного выше очевидно, что без надежного управления, прикрепления и фиксации подъемного крюка рулоны бумаги могут падать и причинять значительный ущерб из-за повреждений. При необходимости устранения такого риска, что всегда требуется в настоящее время, перемещение рулонов бумаги осуществляется с нежелательными задержками из-за обязательных ручных и визуальных контрольных проверок, выполняемых персоналом.
Раскрытие изобретения
Таким образом, целью настоящего изобретения является преодоление указанных выше недостатков. В частности, целью изобретения является создание решения, обеспечивающего полностью автоматизированные операции подъема и перемещения рулонов бумаги, выполняемых без какого-либо риска.
Эти цели достигаются настоящим изобретением, согласно которому подъемная поверхность выполнена в виде поверхности с проточкой, а механизм управления выполнен в виде выступа, более узкого, чем подъемная поверхность, проходящего вперед от ствола крюка сбоку от крюкообразной части, причем передний конец выступа снабжен рычагом управления, нижняя поверхность которого наклонена вверх к верхней поверхности выступа, а боковые поверхности сужаются к наконечнику выступа.
Другими словами, в основе изобретения лежит механизм управления, приводимый в действие путем вхождения в контакт со стороной захватываемого объекта, находящейся сбоку от точки подъема объекта.
Управляющее усилие механизма управления, который направляет подъемный крюк в требуемое положение, создается путем перемещения крана благодаря форме механизма управления, описанной ниже, для одновременного отклонения крюка из положения равновесия и направления крюка для вхождения в контакт с подъемной поверхностью.
Изобретение обеспечивает очевидные преимущества, так как предлагает абсолютно надежный процесс подъема при полностью автоматизированном подъеме и благодаря отсутствию необходимости выполнения контрольных проверок человеком значительно ускоряет процесс подъема как при ручном, так и при автоматизированном подъеме.
Краткое описание чертежей
Ниже приведено более подробное описание изобретения в соответствии с предпочтительными вариантами осуществления и со ссылкой на сопроводительные чертежи, на которых:
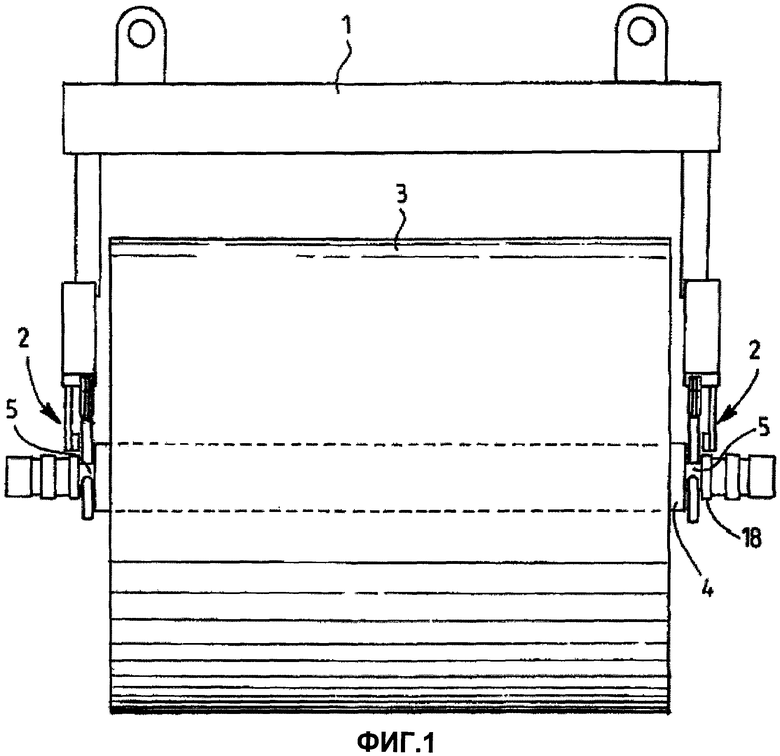
фиг.1 представляет собой вид спереди грузонесущей балки крана с подъемными крюками, пристегнутыми к его концам;
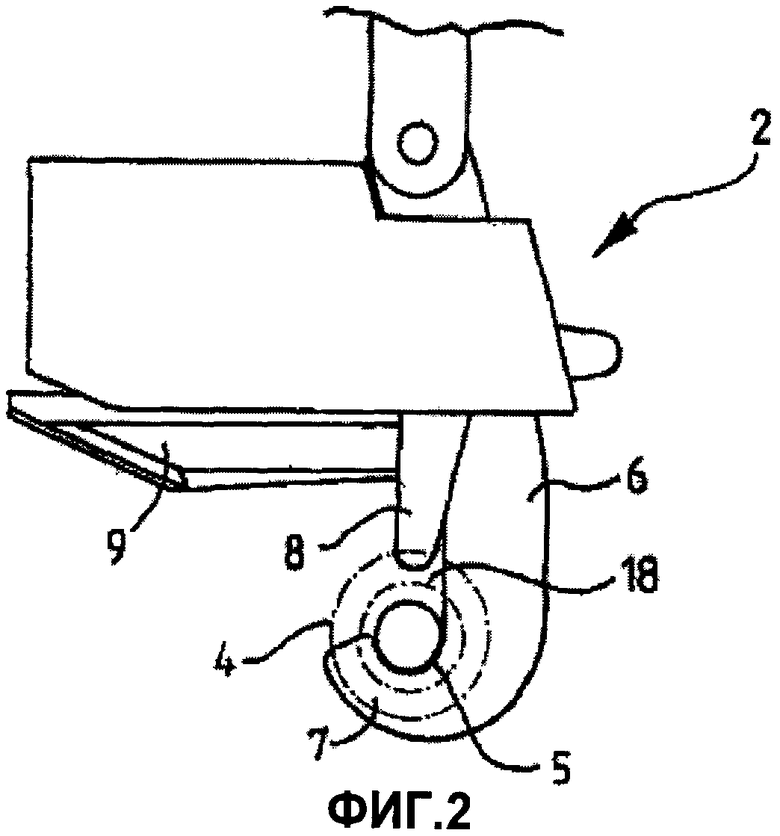
фиг.2 представляет собой вид сбоку одного из крюков, показанный на фиг.1;
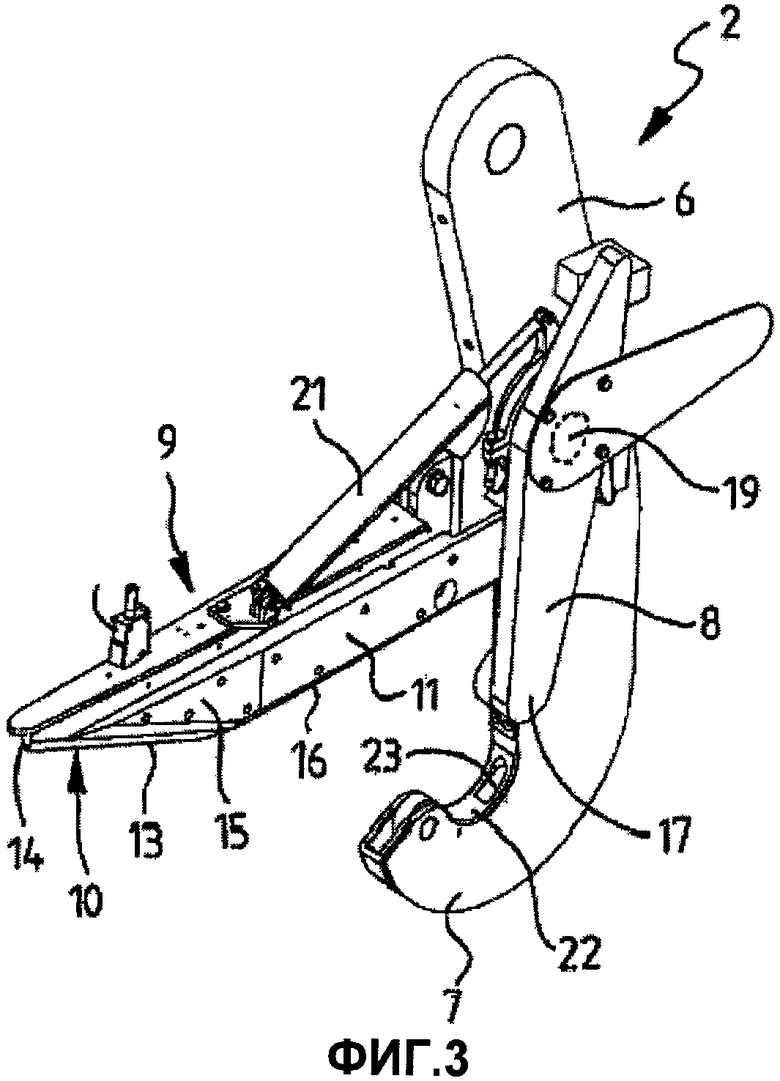
фиг.3 представляет собой вид в аксонометрии подъемного крюка, показанного на предыдущих фигурах, с которого снят защитный кожух механизма управления и запорного механизма;
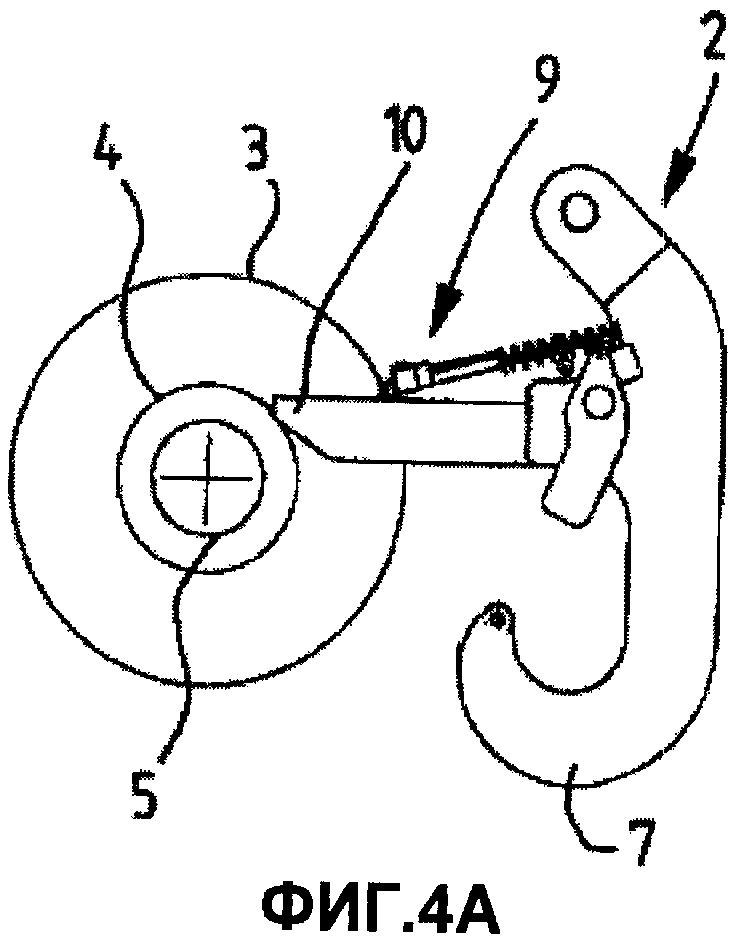
фиг.4A-4C представляют собой этапы работы подъемного крюка согласно изобретению.
Осуществление изобретения
На фиг.1 показана несущая балка 1 мостового крана, причем концы балки имеют подъемные крюки 2 согласно изобретению. Подъемные крюки, в свою очередь, находятся в контакте с проточками 5 цилиндрической подъемной поверхности на намоточном валу 4 рулона 3 бумаги бумагоделательной машины целлюлозно-бумажного комбината, причем диаметр проточек меньше, чем диаметр частей смежных поверхностей намоточного вала 4.
На фиг.2 и 3 подъемный крюк показан более подробно и содержит ствол 6 крюка, крюкообразную часть 7, соединенную со стволом 6 крюка, запорный механизм 8, выполненный с возможностью фиксации подъемного крюка к поднимаемому объекту, то есть в данном случае к рулону 3, механизм 9 управления, установленный над крюкообразной частью 7 и выполненный с возможностью вхождения в контакт с верхней поверхностью проточки 5 подъемной поверхности для направления крюкообразной части 7 в подъемное положение к нижней поверхности проточки подъемной поверхности.
Механизм 9 управления представляет собой выступ 9, который является более узким, чем проточка 5 подъемной поверхности, и проходит вперед от ствола 6 крюка сбоку от крюкообразной части 7, причем передний конец выступа 9 содержит рычаг 10 управления, нижняя поверхность 13 которого наклонена вверх к верхней поверхности выступа, а боковые поверхности 15 сужаются к наконечнику 14 выступа 9, при этом нижняя поверхность 16 плеча 11 выступа, проходящая от ствола 6 крюка к рычагу 10, в свою очередь, слегка наклонена вниз, причем этот наклон меньше, чем наклон вверх нижней поверхности 13 рычага 10.
Запорный механизм 8 представляет собой ведомое плечо 8, прикрепленное на подшипниках к стволу 6 крюка или механизму 9 управления, причем наконечник 17 плеча находится в стороне от проточки 5 подъемной поверхности поднимаемого объекта 3 сбоку от крюкообразной части 7 и входит в контакт с цилиндрической запорной поверхностью 18, смежной с проточкой 8 подъемной поверхности, при этом диаметр запорной поверхности больше, чем диаметр проточки 5 подъемной поверхности. Когда к поднимаемому объекту 3 или, в данном случае, к проточке 5 подъемной поверхности намоточного вала 4 направляется крюкообразная часть 7, плечо 8 поворачивается под воздействием верхней поверхности проточки 5 подъемной поверхности, обеспечивая вхождение проточки 5 подъемной поверхности в крюкообразную часть 7, причем, когда проточка 5 подъемной поверхности, то есть поднимаемый объект 3, находится в крюкообразной части 7, плечо 8 находится в разгруженном состоянии, и наконечник 17 плеча 8 устремляется вдоль центральной точки цилиндрической запорной поверхности 18 в прямом направлении крюкообразной части 7 для фиксации поднимаемого объекта 3 к крюкообразной части 7. Усилие для перемещения запорного плеча 8 может создаваться с помощью пружины (не показана), которая может быть установлена, например, на валу 19, который прикрепляет плечо 8 к стволу 6 крюка с возможностью поворота. Запорное плечо 8 может дополнительно иметь исполнительный механизм 21 для поворачивания плеча по направлению к стволу 6 крюка при извлечении поднимаемого объекта 3 из крюкообразной части. Исполнительный механизм 21 может быть электрическим или гидравлическим, или, например, их комбинацией.
Захватная поверхности 22 (то есть поверхность, которая входит в контакт с нижней поверхностью проточки 5 направляющей поверхности) крюкообразной части 6 и механизм 9 управления могут иметь электрическое сенсорное устройство 23 с датчиками положения для обеспечения управления и прикрепления крюкообразной части 7. Сенсорное устройство механизма 9 управления сообщает о направлении к проточке 5 подъемной поверхности путем контроля проточки 5, а сенсорное устройство 23 крюкообразной части 7 сообщает, когда нижняя поверхность проточки 5 подъемной поверхности в достаточной степени входит в крюкообразную часть 7.
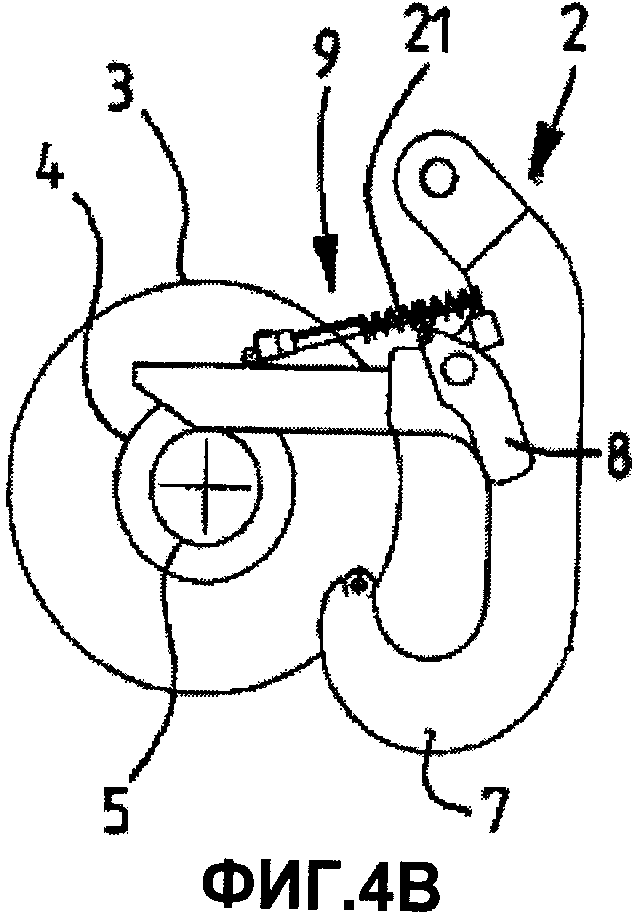
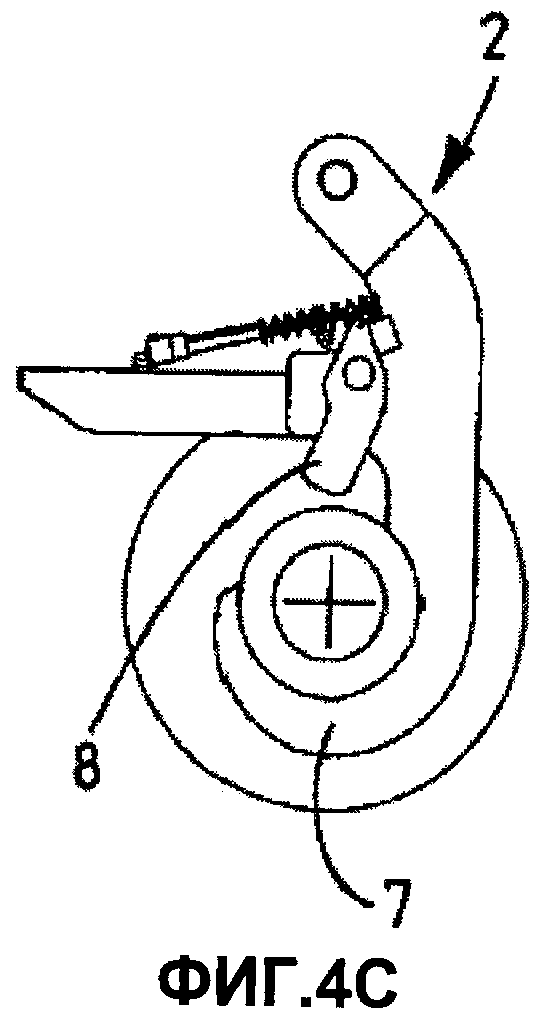
На фиг.4А-4С показаны этапы вхождения подъемного крюка 2, то есть его крюкообразной части 7, в проточку 5 подъемной поверхности поднимаемого объекта 3. На фиг.4А подъемный крюк 2 направляется в горизонтальном направлении к подъемной точке поднимаемого объекта 3, то есть проточке 5 подъемной поверхности намоточного вала 4, до вхождения рычага 10 механизма 9 управления в контакт с проточкой 5. Затем механизм 9 управления изменяет положение равновесия крюка 2 и направляет крюкообразную часть 7 к нижней поверхности проточки 5 подъемной поверхности, при этом механизм 9 управления проскальзывает на верхней поверхности проточки 5 подъемной поверхности, как показано на фиг.4В. На фиг.4В запорное устройство 8 приведено исполнительным механизмом 21 в открытое положение, хотя на практике в действительности оно направляется запорной поверхностью 18 намоточного вала 4. На фиг.4С, когда подъемный крюк поднимается, механизм 9 управления больше не направляется проточкой подъемной поверхности. Нижняя поверхность проточки 5 подъемной поверхности, и тем самым поднимаемый объект, находятся в крюкообразной части 7 крюка 2. В то же время запорный механизм 8 поворачивается автоматически или вручную в положение запирания.
Приведенное выше описание лишь поясняет основополагающую идею изобретения. Поэтому специалист в данной области техники может изменить конкретные детали изобретения в пределах прилагаемой формулы изобретения.
Изобретение относится к грузоподъемным устройствам. Крюк выполнен с возможностью захвата поднимаемого объекта за предусмотренную на нем цилиндрическую подъемную поверхность. Подъемный крюк имеет ствол крюка, крюкообразную часть, соединенную со стволом крюка, и запорный механизм для фиксации подъемного крюка к поднимаемому объекту. Для обеспечения надежного прикрепления подъемного крюка к поднимаемому объекту механизм управления установлен над крюкообразной частью для вхождения в контакт с верхней частью подъемной поверхности и направления крюкообразной части в подъемное положение на нижнюю часть подъемной поверхности. Обеспечивается полное автоматизирование операций подъема и перемещения грузов. 7 з.п. ф-лы, 6 ил.
1. Подъемный крюк, выполненный с возможностью захвата поднимаемого объекта (3) за предусмотренную на нем цилиндрическую подъемную поверхность (5), причем подъемный крюк (2) имеет ствол (6) крюка, крюкообразную часть (7), соединенную со стволом (6) крюка, запорный механизм (8) для фиксации подъемного крюка (2) к поднимаемому объекту (3), механизм (9) управления, установленный над крюкообразной частью (7) для вхождения в контакт с верхней частью подъемной поверхности (5) с целью направления крюкообразной части (7) в подъемное положение на нижнюю часть подъемной поверхности (5), отличающийся тем, что подъемная поверхность (5) выполнена в виде поверхности с проточкой, а механизм (9) управления выполнен в виде выступа (9), более узкого, чем подъемная поверхность (5), проходящего вперед от ствола (6) крюка сбоку от крюкообразной части (7), причем передний конец выступа (9) снабжен рычагом (10) управления, нижняя поверхность (13) которого наклонена вверх к верхней поверхности (12) выступа, а боковые поверхности (15) сужаются к наконечнику (14) выступа.
2. Подъемный крюк по п.1, отличающийся тем, что нижняя поверхность (16) плеча (11) выступа, проходящая от ствола (6) крюка к рычагу (10) выступа, наклонена вниз, причем этот наклон меньше, чем наклон вверх нижней поверхности (13) рычага (10) выступа (9).
3. Подъемный крюк по п.2, отличающийся тем, что запорный механизм представляет собой ведомое плечо (8), прикрепленное на подшипниках к стволу крюка или механизму (9) управления, причем наконечник (17) плеча находится в стороне от подъемной поверхности (5) поднимаемого объекта (3) сбоку от крюкообразной части и входит в контакт с цилиндрической запорной поверхностью (18), смежной с подъемной поверхностью (5), при этом диаметр запорной поверхности больше, чем диаметр подъемной поверхности (5), причем при направлении к поднимаемому объекту (3) крюкообразной части (7) плечо (8) поворачивается под воздействием этого направляющего перемещения, обеспечивая вхождение подъемной поверхности (5) поднимаемого объекта (3) в крюкообразную часть (7), а при нахождении поднимаемого объекта (5) в крюкообразной части (7) плечо (8) находится в разгруженном состоянии, и наконечник (17) плеча направляется вдоль центральной точки цилиндрической запорной поверхности (18) в прямом направлении крюкообразной части (7) для фиксации поднимаемого объекта (3) к крюку (2).
4. Подъемный крюк по п.3, отличающийся тем, что предусмотрена пружина для создания усилия перемещения плеча (8).
5. Подъемный крюк по любому из пп.2-4, отличающийся тем, что предусмотрен противовес для создания усилия перемещения механизма (9) управления.
6. Подъемный крюк по п.3 или 4, отличающийся тем, что плечо (8) дополнительно содержит исполнительный механизм (21) для поворачивания плеча по направлению к стволу (6) крюка с целью извлечения поднимаемого объекта (3) из крюкообразной части (7),
7. Подъемный крюк по любому из пп.1-4, отличающийся тем, что захватная поверхность (22) крюкообразной части (7) и механизм (9) управления снабжены электрическим сенсорным устройством (23, 24) для обеспечения управления и прикрепления крюкообразной части (7).
8. Подъемный крюк по любому из пп.1-4, отличающийся тем, что имеет два крюка (2), которые прикреплены к концам грузонесущей балки (1), предназначенной для перемещения рулонов (3) бумаги на целлюлозно-бумажном комбинате, причем крюки (2) выполнены с возможностью захвата рулонов (3) бумаги за цилиндрические подъемные поверхности (5) цилиндрических намоточных валов (4).
| Автоматическое устройство к грузозахватному органу | 1982 |
|
SU1093679A2 |
| JP 54136263 U, 21.09.1979 | |||
| US 4256336 A, 17.03.1981 | |||
| Крюк | 1984 |
|
SU1209568A1 |

