Изобретение относится к области подъемно-транспортного машиностроения и может быть использовано в системах управления и защиты грузоподъемных кранов.
Согласно требованиям нормативной документации грузоподъемные краны оборудуются приборами и устройствами безопасности различных типов: ограничителями рабочих движений, ограничителями грузоподъемности или грузового момента, устройствами координатной защиты и т.д. Составной частью таких приборов и устройств являются датчики положения рабочего оборудования.
Известны системы безопасности грузоподъемных кранов с перемещаемым крановым оборудованием, содержащие цифровой вычислительный блок, к информационным входам которого подключены мультиплексным каналом обмена данных периферийные устройства регистрации параметров крана, включающие датчики перемещения оборудования крана, а к выходам - регистратор параметров крана с таймером реального времени, блок визуальной индикации, блок предупредительной сигнализации и исполнительный блок, и внешнее запоминающее устройство, соединенное с цифровым вычислительным блоком двухсторонним каналом обмена данных (см., например, патент РФ на полезную модель №38747, В66С 23/90, 10.07.2004). Система, описанная в патенте РФ №38747, использована в комплексном приборе безопасности ОНК-160Б (Ограничитель нагрузки башенного крана ОНК-160Б. Руководство по эксплуатации. ЛГФИ.408844.025-01РЭ, ОАО «Арзамасский приборостроительный завод», с.1-19, 48-49). Прибор ОНК-160Б осуществляет корректировку показаний датчика положения грузоподъемного крана на подкрановом пути при нахождении его на нулевой отметке, что совпадает с нахождением крана в точке срабатывания концевого выключателя. Нахождение крана в этой точке связано только с необходимостью проверки концевого выключателя перед началом работы с одновременной корректировкой показаний датчика положения крана. Однако, при определенных обстоятельствах, например, вследствие проскальзывания ходового колеса крана, с которым соединен датчик перемещения, "уход" показаний датчика в течение рабочей смены может достигнуть критической величины, что приведет к неправильной работе координатной защиты крана.
Задачей настоящего изобретения является создание системы безопасности грузоподъемного крана с повышенной точностью определения положения его оборудования за счет многократной корректировки показаний датчика перемещения оборудования крана в процессе его работы.
Таким образом, достигаемый технический результат выражается в повышении надежности работы координатной защиты крана.
Решение поставленной задачи и достижение технического результата обеспечивается тем, что система безопасности грузоподъемного крана с перемещаемым крановым оборудованием, содержащая цифровой вычислительный блок, к информационным входам которого подключены мультиплексным каналом обмена данных выходы периферийных устройств регистрации параметров крана, включающих, по меньшей мере, один датчик перемещения оборудования крана, а к выходам - регистратор параметров крана с таймером реального времени, блок визуальной индикации, блок предупредительной сигнализации и исполнительный блок, и внешнее запоминающее устройство, соединенное с цифровым вычислительным блоком двухсторонним каналом обмена данных, согласно изобретению снабжена, по крайней мере, одним сигнализатором пересечения оборудованием крана, по меньшей мере, одной контрольной точки, находящейся в рабочей зоне крана, подключенным к дополнительному информационному входу цифрового вычислительного блока, а последний приспособлен для коррекции показаний датчика перемещения оборудования крана по сигналам с указанного сигнализатора.
На чертеже изображена функциональная схема предлагаемой системы безопасности рельсового башенного крана с установленной на его стреле грузовой тележкой.
Система безопасности содержит цифровой вычислительный блок 1, внешнее запоминающее устройство 2, регистратор 3 параметров крана со встроенным в него таймером реального времени, блок 4 визуальной индикации, блок 5 предупредительной сигнализации, исполнительный блок 6, периферийные устройства 71...7m регистрации параметров крана, включающие датчик 71 перемещения грузового крана по подкрановому пути и датчик 72 перемещения грузовой тележки по направляющим поясам стрелы крана, и сигнализаторы 81...8n пересечения оборудованием крана контрольных точек, находящихся в рабочих зонах крана, включающие сигнализатор 81 пересечения ходовым устройством крана контрольной (реперной) точки, расположенной на рельсовом крановом пути, и сигнализатор 82 пересечения грузовой тележкой контрольной (реперной) точки, расположенной по ходу движения грузовой тележки.
Выходы периферийных устройств 71...7m регистрации параметров крана и выходы сигнализаторов 81...8n подключены мультиплексным каналом обмена данных к соответствующим информационным входам цифрового вычислительного блока 1. Внешнее запоминающее устройство 2 соединено с цифровым вычислительным блоком двухсторонним каналом обмена данных. К выходам цифрового вычислительного блока подключены регистратор 3 параметров крана, блок 4 визуальной индикации, блок 5 предупредительной сигнализации и исполнительный блок 6.
Периферийные устройства 71...7m регистрации параметров крана размещены в различных зонах крана и включают в себя аналоговые датчики с аналого-цифровыми преобразователями и цифровые датчики. Аналоговые датчики измеряют плавно изменяющиеся параметры работы крана и используют для измерения чувствительные элементы с линейным и нелинейным выходным сигналом. Цифровые датчики измеряют дискретные параметры работы крана.
Сигнализаторы 81...8n пересечения оборудованием крана контрольных точек, находящихся в рабочих зонах крана, представляют собой контактные или бесконтактные дискретные датчики (емкостные, индуктивные, оптические, ультразвуковые, магниточувствительные и др).
Расположение контрольных (реперных) точек на рельсовых направляющих крана и грузовой тележки определяется при предварительном анализе работы крана, исходя из того, что данную точку кран и его грузовая тележка пересекают максимальное количество раз во время своей работы. Количество контрольных точек на рельсовых направляющих крана и грузовой тележки может быть больше, чем описано выше. Это позволяет неоднократно корректировать показания датчиков перемещения и повысить тем самым точность определения положения крана и грузовой тележки.
Система работает следующим образом.
При работе грузоподъемного крана периферийные устройства 71...7m осуществляют измерение параметров, характеризующих загрузку крана и положение его грузоподъемного оборудования. Значения рабочих параметров крана по мультиплексному каналу обмена данных передаются в цифровой вычислительный блок 1, который, работая по программе, определенной при проектировании прибора безопасности и предварительно записанной во внешнее запоминающее устройство 2, осуществляет сравнение фактического нагружения крана с предельно допустимым, а также осуществляет сравнение фактического положения грузоподъемного оборудования с зоной его допустимых положений, и в зависимости от результатов сравнений выдает сигнал на исполнительный блок 6 на разрешение или запрещение отдельных видов движений крана.
В момент прохождении краном контрольной точки, находящейся на подкрановом пути, координаты которой предварительно занесены во внешнее запоминающее устройство 2, с сигнализатора 81 в цифровой вычислительный блок 1 поступает сигнал о нахождении крана в точке корректировки. Цифровой вычислительный блок производит корректировку показаний датчика 71 перемещения крана по подкрановому пути по сигналам сигнализатора 81. Аналогично производится корректировка показаний датчика 72 перемещения грузовой тележки по направляющим поясам стрелы крана по сигналам сигнализатора 82.
Все виды и направления движений передаются из цифрового вычислительного блока 1 в регистратор 3 параметров и записываются в нем в режиме текущего времени с контролем времени по таймеру для определения времени работы отдельных механизмов и анализа работы крана, что позволяет своевременно проводить регламентные работы. Кроме того, в цифровом вычислительном блоке 1 могут определяться движения, которые находятся в диапазоне, близком к граничным значениям, с отображением информации в блоке 4 визуальной индикации и выдачей звукового сигнала блоком 5 предупредительной сигнализации для предупреждения машиниста о приближении к граничным значениям параметров крана, например приближении к концу или началу пути, а также приближении к максимальным и минимальным значениям высоты, вылета и поворота.
Заявленная система может быть изготовлена промышленным способом с использованием современных компонентов и технологий. Для реализации цифрового вычислительного блока можно использовать микропроцессор MSP430F149 фирмы "Texas Instruments" (США) или другие микропроцессоры подобного типа. В качестве периферийных устройств регистрации параметров крана может быть использована серийно выпускаемая продукция Арзамасского приборостроительного завода, например аналоговые датчики перемещений ЛГФИ.401221.004, ЛГФИ.401221.006, ЛГФИ.401221.008 и их исполнения, или новые разработки цифровых датчиков, в частности датчик усилия цифровой ДУЦ ЛГФИ.404176.013, и аналогичная аппаратура других приборостроительных заводов. В качестве сигнализаторов могут быть использованы бесконтактные выключатели, выпускаемые ЗАО Научно-производственная фирма «Мега-К», г.Калуга.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА С ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2333881C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2008 |
|
RU2381172C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ С ЭЛЕКТРОПРИВОДОМ | 2008 |
|
RU2381171C1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНЫХ КРАНОВ ОТ СТОЛКНОВЕНИЙ | 2009 |
|
RU2398728C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УСТОЙЧИВОСТЬЮ СТАЦИОНАРНОГО БАШЕННОГО КРАНА | 2010 |
|
RU2426684C1 |
| СПОСОБ БЕЗОПАСНОГО УПРАВЛЕНИЯ БАШЕННЫМ КРАНОМ | 2006 |
|
RU2319657C2 |
| СПОСОБ СИГНАЛИЗАЦИИ О РАБОТЕ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2004 |
|
RU2276095C2 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ СТРЕЛОВОГО КРАНА | 2009 |
|
RU2391285C1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ (ВАРИАНТЫ) И СИСТЕМА БЕЗОПАСНОСТИ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2009 |
|
RU2396201C1 |
| СПОСОБ КОНТРОЛЯ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2264973C2 |
Изобретение относится к области подъемно-транспортного машиностроения и может быть использовано в системах управления и защиты грузоподъемных кранов. Система безопасности содержит цифровой вычислительный блок (1), к информационным входам которого подключены мультиплексным каналом обмена данных выходы периферийных устройств (71...7m) регистрации параметров крана, включающих, по меньшей мере, один датчик перемещения оборудования крана, а к выходам - регистратор (3) параметров крана с таймером реального времени, блок (4) визуальной индикации, блок (5) предупредительной сигнализации и исполнительный блок (6), и внешнее запоминающее устройство (2), соединенное с цифровым вычислительным блоком двухсторонним каналом обмена данных. Система снабжена, по крайней мере, одним сигнализатором (8) пересечения оборудованием крана, по меньшей мере, одной контрольной точки, находящейся в рабочей зоне крана, подключенным к дополнительному информационному входу цифрового вычислительного блока, а последний приспособлен для коррекции показаний датчика перемещения оборудования крана по сигналам с указанного сигнализатора. Техническим результатом изобретения является повышение надежности работы координатной защиты крана. 1 ил.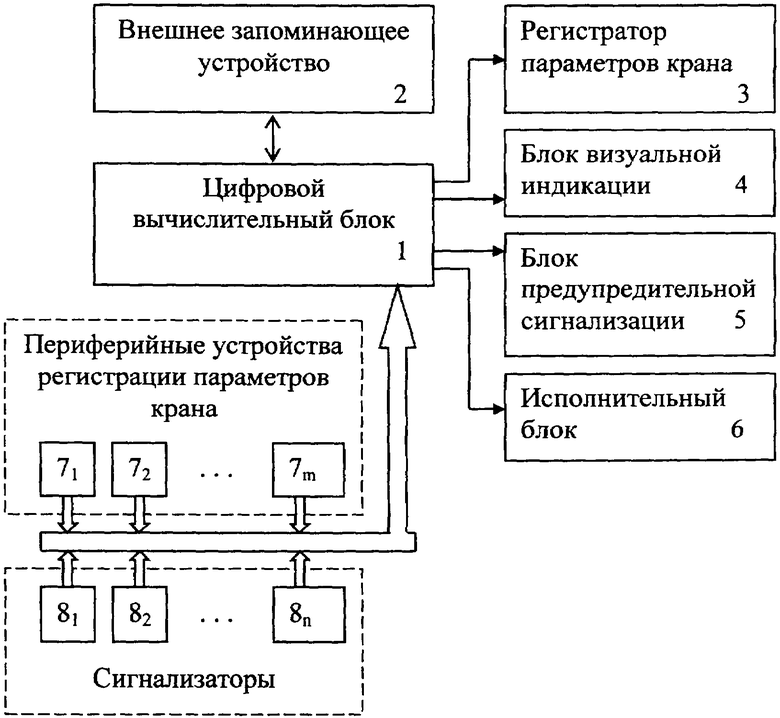
Система безопасности грузоподъемного крана с перемещаемым крановым оборудованием, содержащая цифровой вычислительный блок, к информационным входам которого подключены мультиплексным каналом обмена данных выходы периферийных устройств регистрации параметров крана, включающих, по меньшей мере, один датчик перемещения оборудования крана, а к выходам - регистратор параметров крана с таймером реального времени, блок визуальной индикации, блок предупредительной сигнализации и исполнительный блок, и внешнее запоминающее устройство, соединенное с цифровым вычислительным блоком двухсторонним каналом обмена данных, отличающаяся тем, что она снабжена, по крайней мере, одним сигнализатором пересечения оборудованием крана, по меньшей мере, одной контрольной точки, находящейся в рабочей зоне крана, подключенным к дополнительному информационному входу цифрового вычислительного блока, а последний приспособлен для коррекции показаний датчика перемещения оборудования крана по сигналам с указанного сигнализатора.
| СПОСОБ ПРИГОТОВЛЕНИЯ СВЯЗУЮЩЕГО ВЕЩЕСТВА ДЛЯ ШИШЕЛЬНЫХ ЗЕМЕЛЬ | 1934 |
|
SU38747A1 |
| Способ выявления годичных слоев у древесины лиственных пород | 1939 |
|
SU56887A1 |
| УСТРОЙСТВО ДЛЯ ВЫГРУЗКИ НАВАЛОЧНЫХ ГРУЗОВ ИЗ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2000 |
|
RU2184069C2 |
| РАДИОПРИЕМНИК | 1935 |
|
SU47342A1 |
| US 5730305 A, 24.03.1998. | |||

