Изобретение относится к способу сцепления приводного вала машины для превращения кинетической энергии в механическую энергию с валом отбора мощности посредством муфты.
В газо- и паротурбинных (ГиП, GuD) электростанциях газовые и паровые турбины используются в качестве типов привода. Газовые и паровые турбины являются машинами для превращения кинетической энергии в механическую энергию. За счет своего короткого времени разгона ГиП-электростанция может предоставлять большие объемы электрической энергии за короткое время. Комбинация газовых и паровых турбин вырабатывает электрическую энергию с хорошим кпд при высокой гибкости по отношению к различным первичным носителям энергии, а также эксплуатационных характеристиках всего турбинного блока.
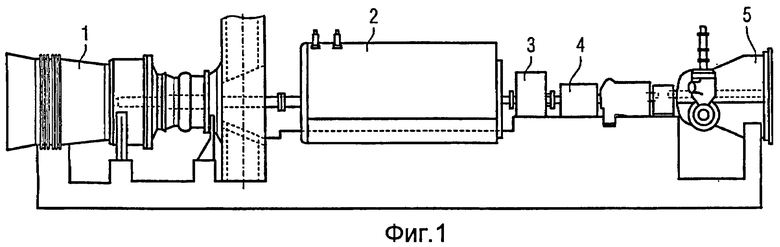
Газовый и паровой замкнутые циклы для повышения кпд связаны в систему. С помощью горячего отходящего газа газовой турбины в котле-утилизаторе вырабатывается водяной пар, который в паровой турбине (процесс трех давлений) вырабатывает механический момент. Эта комбинация повышает кпд при выработке электрической энергии от примерно 36% до, например, 57%. Подобная установка представлена в качестве примера на Фиг.1 (принципиальный чертеж одновальной ГиП-установки с SSS-муфтой между паровой турбиной и синхрогенератором). Приведенная для примера ГиП-одновальная установка содержит газовую турбину 1, генератор 2, возбудитель 3, муфту 4 и паровую турбину 5.
В приведенной для примера одновальной установке газовая и паровая турбины с только одним генератором находятся на общем участке вала. За счет исключения второго генератора и соответствующих его компонентов может быть сэкономлено примерно 10% инвестиционных затрат.
Для того чтобы иметь возможность использовать наилучшим образом преимущества газовой турбины, паровая турбина сначала отделяется от участка вала. При рабочей температуре паровая турбина может приводиться в сцепление почти независимо от состояния нагрузки генератора, через муфту, например, через синхронизирующую, автоматически включающуюся обгонную зубчатую муфту (SSS-сцепную муфту).
Газовая турбина и генератор системы имеют при этом синхронное число оборотов. Когда паровая турбина превышает это число оборотов, она автоматически сцепляется посредством внешней резьбы и может вслед за этим переносить мощность на электрический генератор. Вся мощность турбинного блока распределяется на две трети на газовую турбину и на одну треть на паровую турбину.
В стационарно сцепленном режиме мощности возникает зависимость измеренного колебания вала и опор (подшипников) от относительного углового положения частичных участков вала относительно друг друга, независимо от того, идет ли речь о машинах, которые эксплуатируются при 50 Гц или 60 Гц. При определенных угловых положениях превышаются допустимые граничные значения, допустимые для колебаний опор и вала.
Измерения изгибных колебаний перед и после муфты и соответствующих углов сцепления могут служить причиной того, чтобы идентифицировать благоприятные и неблагоприятные положения.
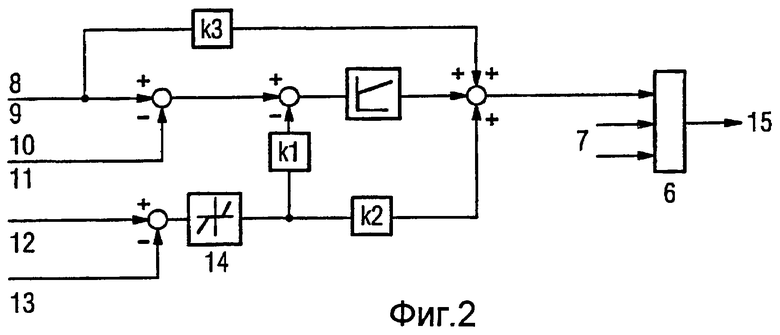
Как регулятор числа оборотов/мощности газовой турбины, так и регулятор числа оборотов/размыкания паровой турбины имеют PI-структуру. Как можно видеть на Фиг.2 (основная структура регулятора газовой и паровой турбины), через центральный выбор 6 минимального значения вступают в действие другие регуляторы 7. На Фиг.2 в основную структуру вводятся номинальное значение мощности 8, номинальное значение размыкания 9, действительное значение мощности 10, действительное значение размыкания 11, номинальное значение числа оборотов 12 и действительное значение числа оборотов 13, причем сигналы 12 и 13 подаются на зону нечувствительности 14. Основная структура вырабатывает действительное значение 15 положения клапанов, причем принимаются во внимание статика k1, влияние изменения k2 частоты и влияние изменения k3 номинального значения мощности.
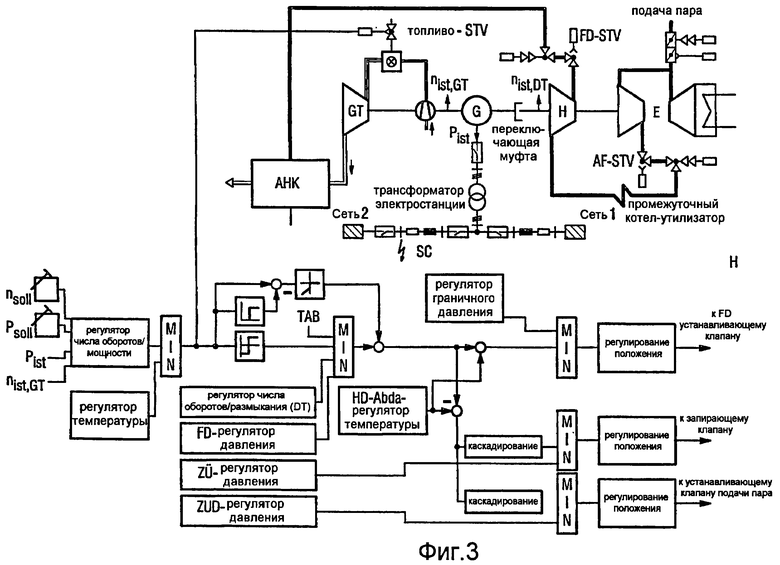
Обзор примерного регулирования одновальной установки приведен на Фиг.3 (обзор одновальной ГиП-установки). Процесс сцепления при номинальном режиме газовой турбины определяется теперь посредством регулятора числа оборотов паровой турбины. Так как проведенные моделирования в значительной степени независимы от остальных параметров регулирования, последующее рассмотрение главным образом сосредоточено на регуляторе числа оборотов паровой турбины.
Регулятор числа оборотов/размыкания имеет задачу регулировать вырабатываемое котлом-утилизатором и текущее в паровую турбину количество пара соответственно заданным номинальным значениям для числа оборотов и размыкания. При этом речь идет о 2-параметрическом регуляторе, который число оборотов и мощность турбинного блока устанавливает для следующих рабочих случаев:
- пуск паровой турбины
- сцепление с участком вала газовой турбины
- нагрузка турбины
- сброс нагрузки и работа вне энергосистемы (изолированная работа)
- останов турбины.
Выходные сигналы отдельных значений размыкания связываются друг с другом при формировании номинального значения размыкания и управляют соответствующими процессами позиционного регулирования. Каждое позиционное регулирование позиционирует через сервоклапан электрогидравлический привод (ЕНА), который, в свою очередь, приводит в действие соответствующий установочный клапан.
Кроме того, на каждый установочный клапан (свежий пар, запирание и подача пара) имеется отдельное управление приводом, посредством которого может осуществляться ограничение отдельных установочных вентилей или установочных клапанов.
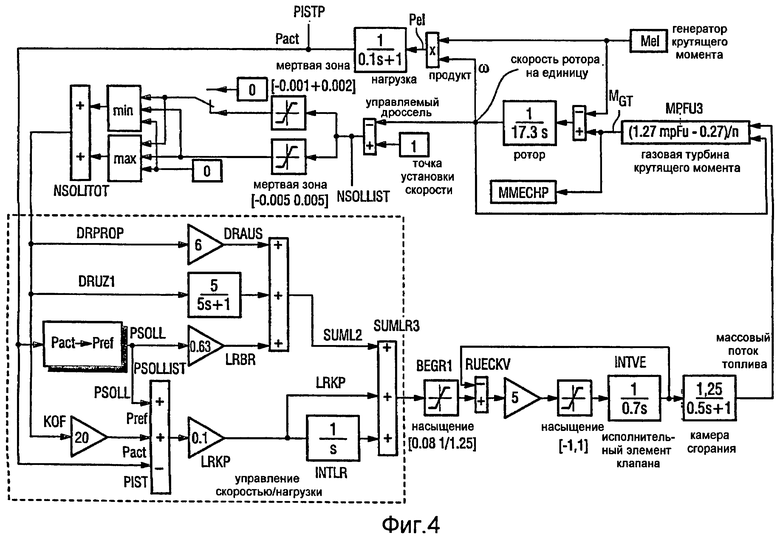
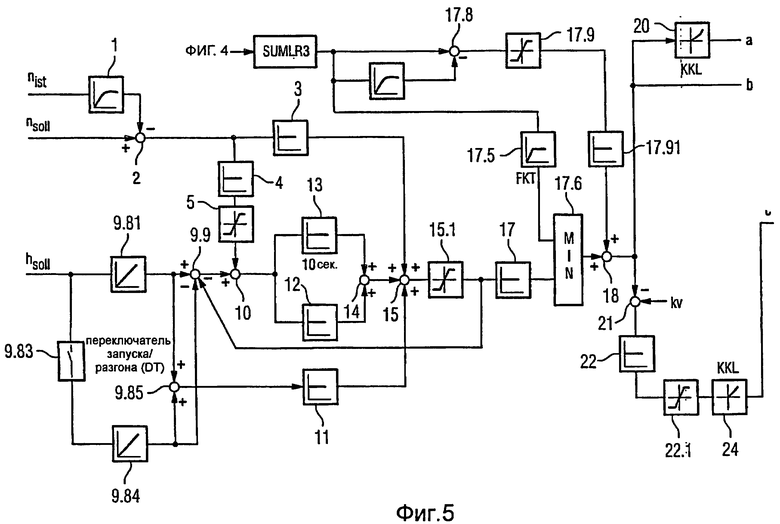
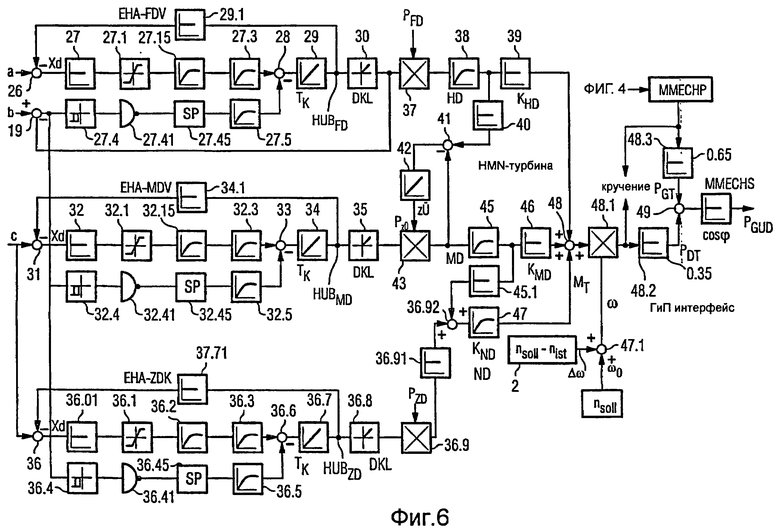
Регулятор числа оборотов/мощности газовой турбины с воздействием на основную частоту и с воздействием на граничную частоту моделировался очень детально, в то время как газовая турбина моделировалась упрощенно (см. Фиг.4; газовая турбина V94.2A). При создании модели паровой турбины очень точно моделировался как регулятор числа оборотов/размыкания (Фиг.5, паровая турбина с регулятором числа оборотов/ размыкания), так и сама паровая турбина (Фиг.6; паровая турбина ГиП-установки).
В режиме регулятора числа оборотов паровая турбина запускается до номинального числа оборотов (эквивалентного действительного числа оборотов участка вала газовой турбины). Если число оборотов паровой турбины превышает число оборотов газовой турбины, происходит автоматическое сцепление обоих участков вала. Структура регулятора при этом также автоматически переключается из режима регулятора числа оборотов в режим регулятора размыкания.
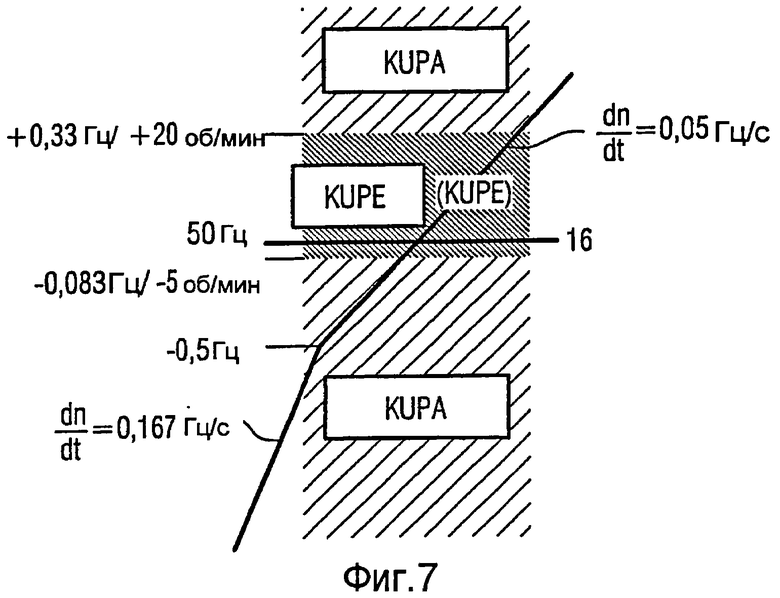
Номинальное значение числа оборотов при запуске представлено на Фиг.7 (переходные процессы числа оборотов при разгоне паровой турбины). Исходя из стационарного режима подогрева в несколько сотен оборотов/мин паровая турбина ускоряется с переходным процессом 0,167 Гц/с. Как только действительное значение достигло определенной узкой подсинхронной частоты, для сцепления задается более равномерный переходный процесс порядка 0,05 Гц/с в качестве номинального значения. Стандартное значение для этого переключения составляет fsync 0,5 Гц (для электростанций как на 50 Гц, так и на 60 Гц).
Из относительного числа оборотов обоих частичных участков вала генерируется сигнал KUPE (включение сцепления) для дальнейшей обработки состояния сцепления. Фиг.7 показывает окно для этого сигнала от -0,083 Гц до +0,33 Гц соответственно, от -5 об/мин до +20 об/мин по отношению к номинальному числу оборотов 16 газовой турбины или приводного вала.
Опытным путем в условиях эксплуатации показано, что при более узком окне сигнал KUPE ввиду неточностей измерения остается нестабильным. Если из-за дефектной муфты не произошло включение сцепления, то верхняя граница окна препятствует дальнейшему увеличению числа оборотов. Очевидно, что сигнал KUPE, который действителен для всех последующих операций, уже устанавливается, прежде чем паровая турбина достигнет синхронного числа оборотов. Как уже упомянуто, процесс включения сцепления начинается, однако, только при превышении синхронного числа оборотов генератора.
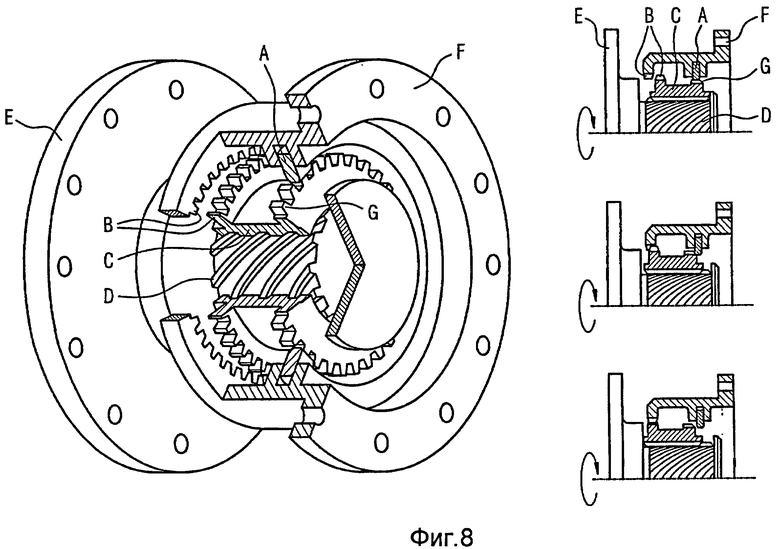
На Фиг.8 (принцип SSS-сцепной муфты) показан принцип сцепления. Переключающая втулка С вращается с числом оборотов паровой турбины, пока не будет достигнуто синхронное число оборотов, после чего она посредством защелки А фиксируется на переключательной части генераторного вала F. При надсинхронном числе оборотов это приводит ввиду резьбы к осевому перемещению втулки в направлении паровой турбины. Уже спустя короткое время происходит зацепление зубцов В и через них - передача приводного момента. Далее приведенная в качестве примера SSS-сцепная муфта имеет крутую резьбу D, приводную сторону Е (паровая турбина) и зубчатый венец G защелки. На Фиг.8 к тому же показаны на правой стороне чертежа три меньшие изображения. Верхнее изображение иллюстрирует расцепленное состояние, среднее изображение показывает движение затормаживания и нижнее изображение показывает сцепленное состояние.
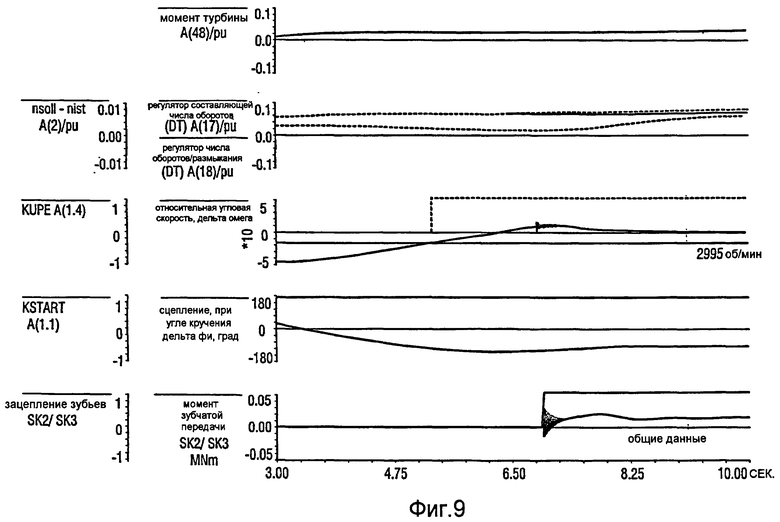
Моделирование с актуальной стратегией регулирования представлено на Фиг.9 (процесс включения сцепления согласно концепции регулирования по уровню техники). Сигнал KUPE поступает заметно перед началом включения сцепления и перед зубчатым зацеплением. Вследствие этого тотчас же компонент регулятора числа оборотов паровой турбины при его текущем значении фиксируется и одновременно подключается компонент регулятора размыкания, хотя еще расцепленная паровая турбина находится в режиме числа оборотов.
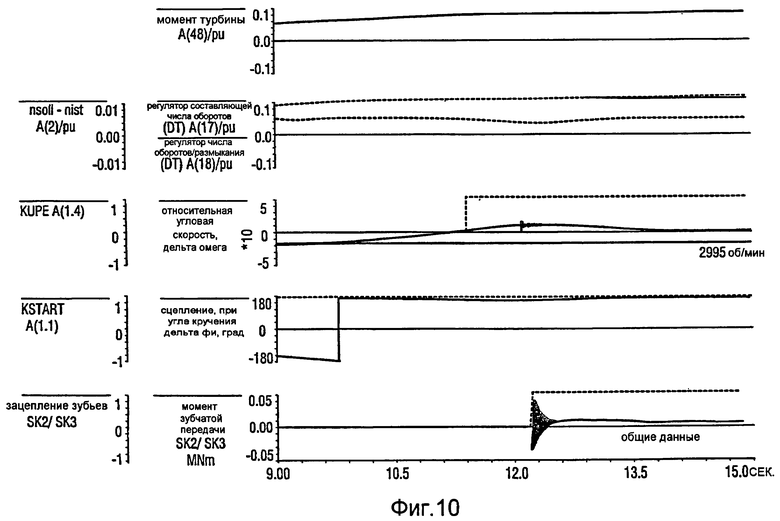
Компонент регулятора размыкания следует очень равномерному переходному процессу порядка 10% в минуту, который по сравнению с влиянием регулятора числа оборотов оказывает лишь незначительное влияние на последующий процесс включения сцепления. Фиг.10 (процесс включения сцепления с модифицированным сигналом KUPE) показывает этот процесс после изменения сигнала KUPE. Только если числа оборотов обоих частичных участков вала равны, здесь устанавливается KUPE. Очевидно, это изменение оказывает влияние на включение сцепления не в значительной степени.
Например, в случае одновальных ГиП-установок два вращающихся частичных участка вала при синхронном числе оборотов сцепляются друг с другом любым образом. Отсюда следуют различные по высоте колебания вала и опор, так что возможным образом могут быть превышены заданные значения предупредительной сигнализации о колебаниях, которые могут привести к слишком затратным последующим уравновешивающим мерам или даже к требованиям штрафов, предъявляемым эксплуатационниками к поставщикам ГиП-установок.
Посредством известных мер по уравновешиванию должен был достигаться хороший режим колебаний всего участка вала. Во всяком случае до настоящего времени включение сцепления происходит нерегулируемым образом и по случайному принципу.
В основе изобретения лежит задача предложить способ вышеуказанного типа, при котором гарантируется, что всегда включение сцепления осуществляется при наименьшем значении колебания, причем весь участок вала должен становиться и оставаться сбалансированным.
В соответствии с изобретением эта задача решается способом с признаками пункта 1 формулы изобретения. Другие предпочтительные формы выполнения представлены в зависимых пунктах.
В целом посредством соответствующего изобретению способа представляется общая стратегия измерения и регулирования для включения сцепления паровой турбины, которая приводит к по возможности малым колебаниям вала и опор после затухания всех процессов компенсации.
Одновременно с помощью изобретения создаются теоретические принципы и принципы техники регулирования для подходящего автоматизированного прибора. Он должен из режима колебаний, а также из сигналов синхронизации частичных участков вала перед включением сцепления определять желательные благоприятные позиции сцепления, при которых изгибное колебание принимает по возможности наименьшие значения.
В основе изобретения лежит идея, что регулирование паровой турбины может быть модифицировано соответствующим образом, чтобы гарантировать как точное определение оптимального угла включения сцепления, так и точное включение сцепления в благоприятных позициях, чтобы не выполнять включение сцепления нерегулируемым и случайным образом.
Применяемая для изобретения модель одновальной установки, включая генератор и сеть, была создана в NETOMAC® и учитывает также торсионное поведение сцепления.
В уровне техники в первую очередь поведение сцепления исследовалось в сцепленном состоянии (режим мощности). Чтобы моделировать собственно процесс включения сцепления, имеющаяся модель была расширена на модуль «Разгон до числа оборотов».
Хотя между Фиг.9 и Фиг.10 незаметно явное изменение, предпочтительным образом предусмотрен сдвиг сигнала KUPE с разности числа оборотов -5 об/мин до 0 об/мин, чтобы гарантировать четкое различение режима регулятора числа оборотов и режима регулятора размыкания. Сигнал KUPA (сцепление разомкнуто) при этом предпочтительно устанавливается только при спадании разности на -5 об/мин, чтобы предотвратить ошибки из-за неточности измерений.
Переходный процесс регулятора числа оборотов перед включением сцепления величиной 0,05 Гц/с первоначально выводился из опыта при синхронизации генератора.
Предпочтительным образом названное значение далее оптимизируется, чтобы гарантировать более мягкое включение сцепления. Здесь предпочтительно предусмотрен более равномерный переходный процесс, чтобы избежать недопустимых толчков при сцеплении зубцов.
Как для определения благоприятного угла сцепления, так и для регулируемого по целевому углу включения сцепления предпочтительным образом предусмотрено, как уже упомянуто выше, что текущая концепция регулирования модифицирована.
Как описано выше, паровая турбина после достижения минимальной рабочей температуры разгоняется от числа оборотов разогрева с постоянной переходной характеристикой до автоматического включения сцепления с синхронного числа оборотов.
При этом целевой угол φК, или угол сцепления φК, при конечном упоре переключающей втулки согласно уровню техники является чисто случайным.
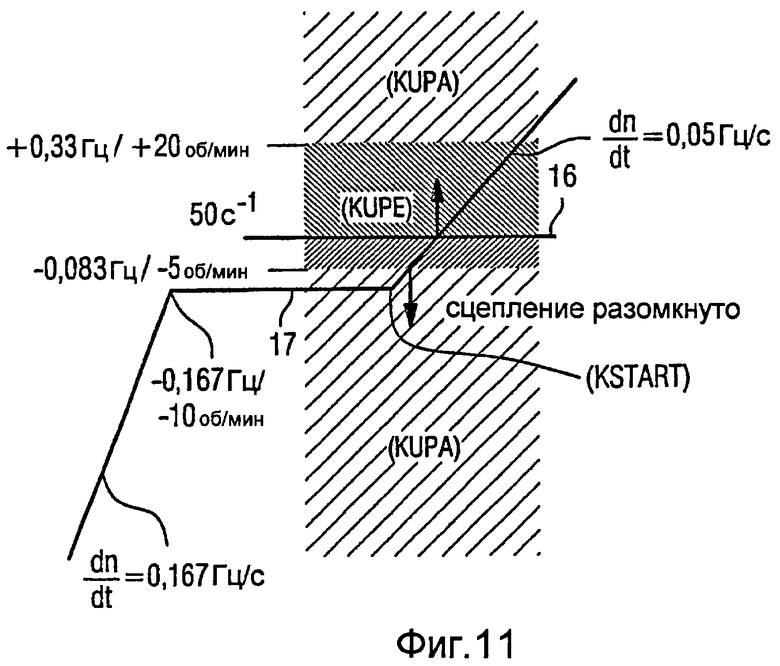
Чтобы достичь заданного угла, паровая турбина предпочтительно запускается при близком подсинхронном числе оборотов (числе оборотов удерживания) и поддерживается на нем. Номинальное значение числа оборотов может задаваться по Фиг.11 (переходный процесс при отрегулированном по целевому углу пуске и включении сцепления). Предпочтительным образом вводится число оборотов 17 удерживания. Предпочтительным образом число оборотов 17 удерживания вводится при 10 об/мин, что соответствует примерно -0,167 Гц.
Это число оборотов удерживается до достижения зависимого от целевого угла (относительного угла кручения φК, угла сцепления φК) стартового угла между приводом и отбором мощности. Если угол кручения φК равен заданному стартовому углу, то устанавливается сигнал KSTART (запуск сцепления). С этого момента времени сцепление включается с любым переходным процессом числа оборотов (предпочтительно 0,05 Гц/с).
Необходимо еще указать на то, что на Фиг.11 показано рекомендуемое изменение сигнала KUPE. Все следующие моделирования подчиняются также этому изменению.
При известном целевом угле φК также предпочтительно определять подлежащий превышению угол Δφ от момента времени старта до конца процесса включения сцепления.
Вычисление этого угла Δφ потребовало бы высокоточной модели каждой отдельной установки, включая все динамические воздействия; это является непрактичным. Предпочтительная возможность состоит в измерении этого угла Δφ в режиме под нагрузкой газовой турбины. Можно исходить из того, что имеется постоянный угол Δφ для каждой ГиП-установки (специфический для установки), который для всех возможных целевых углов φК одинаков. Моделирование процесса включения сцепления при различных целевых углах подтвердило это.
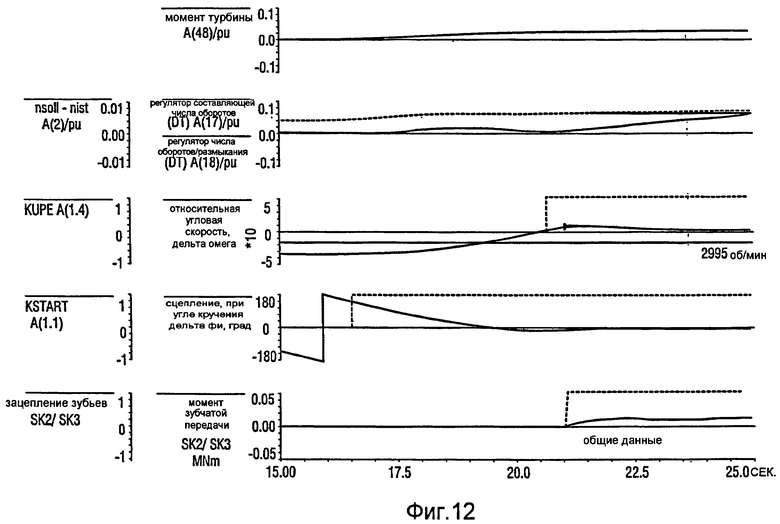
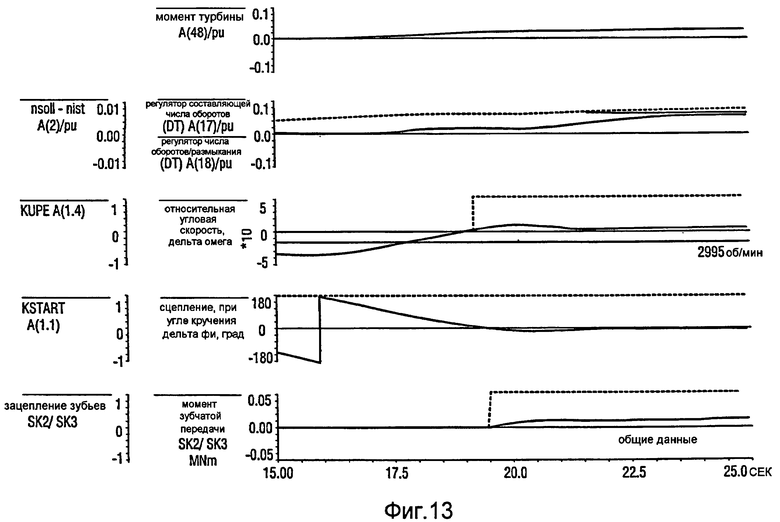
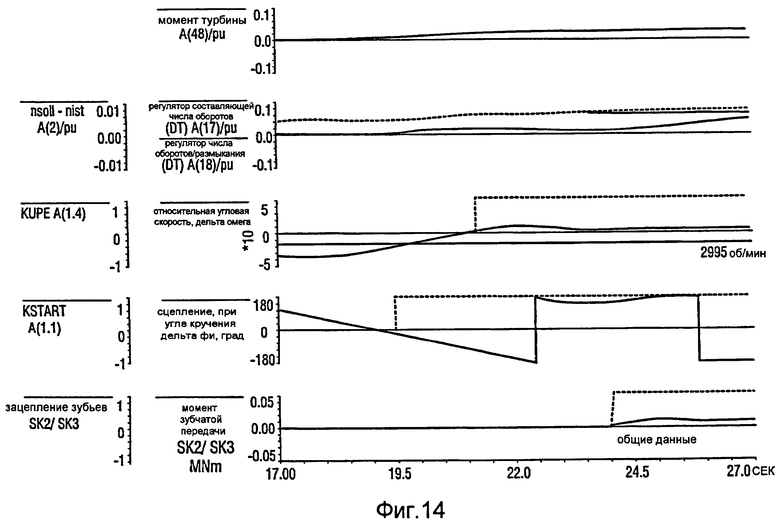
Фиг.12, 13 и 14 (процесс включения сцепления с целевыми углами) показывают результаты моделирования для целевых углов (относительных углов кручения φК) 0° (Фиг.12), 90° (Фиг.13) и 180° (Фиг.14). При применяемой модели сцепления получается угол Δφ примерно 145°. Стартовый угол φ0 вычисляется как
φ0=φК-Δφ
Во всех трех случаях достигается целевой угол φК. Режим кручения, который предусматривается в модели, очевидно, в значительной степени не зависит от угла сцепления или целевого угла φК (относительного угла кручения φК).
Характеристика номинального значения числа оборотов из Фиг.11 может дополнительно применяться для определения оптимального угла сцепления (относительного угла кручения φК).
Посредством запирания сигнала KSTART паровая турбина остается на числе оборотов удерживания -10 об/мин относительно генератора. В этом стационарном расцепленном состоянии обоих частичных участков вала затем колебания вала измеряются и сравниваются, чтобы таким образом определить оптимальный целевой угол.
В случае если у существующих установок существует карта (диаграмма) сцепления, и, таким образом, идентифицирован благоприятный угол сцепления, то он может задаваться как целевой угол φК. Более благоприятный угол тогда не требуется больше определять.
Чтобы лучше понять рассматриваемые проблемы, представлены некоторые основополагающие факторы, касающиеся режима изгибных колебаний вала. Для этого представляется элементарная модель ротора Лаваля в качестве эквивалента соответствующего частичного участка вала, поведение которого описывает принципиальные процессы.
Применяемые далее основные принципы взяты из публикации: R.Gasch, Rotordynamik, Springer Verlag, Berlin, 1975, где они подробно описаны. Формулы предпочтительным образом незначительно изменены в согласовании с измерительной системой ADRE, чтобы иметь возможность позднее непосредственно использовать конкретные измеренные данные.
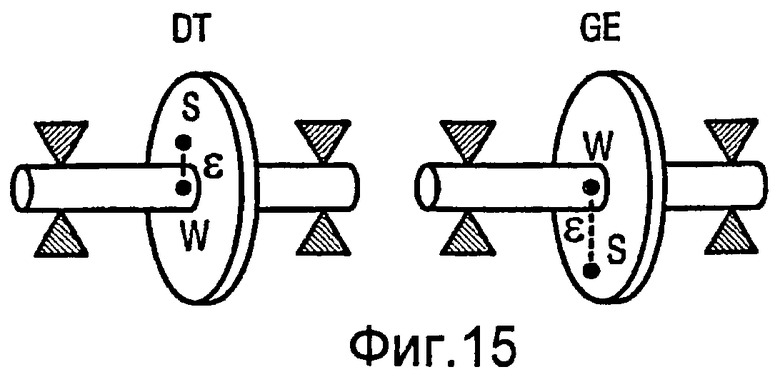
В качестве простой модели участка вала применяется ротор Лаваля, как показано на Фиг.15 (элементарная модель частичных участков ротора Лаваля) в качестве примера. При этом речь идет об имеющем массу диске с центром тяжести S, вынесенным от точки W сквозного похода вала на расстояние ε, как части не имеющего массы вала в двух неподвижных опорах. Соответственно такой ротор Лаваля должен представлять паровую турбину (DT), а также газовую турбину и генератор (GE).
С математической точки зрения предпочтительным является представление местоположения S и W как комплексного пространственного вектора. При этом действительная часть соответствует координате Z, а мнимая часть - координате Y:

Это представление предоставляет решающее преимущество, состоящее в возможности применять способы комплексного вычисления, которые предпочтительно применяются для определения благоприятного угла сцепления φК (целевого угла, относительного угла кручения).
При условии пренебрежения затуханием, силой тяжести и жесткостью опор получается следующее уравнение движения для точки сквозного прохода вала:

где ω0 - критическая круговая частота, которая получается из массы и упругой жесткости вала, и ε - расстояние между S и W.
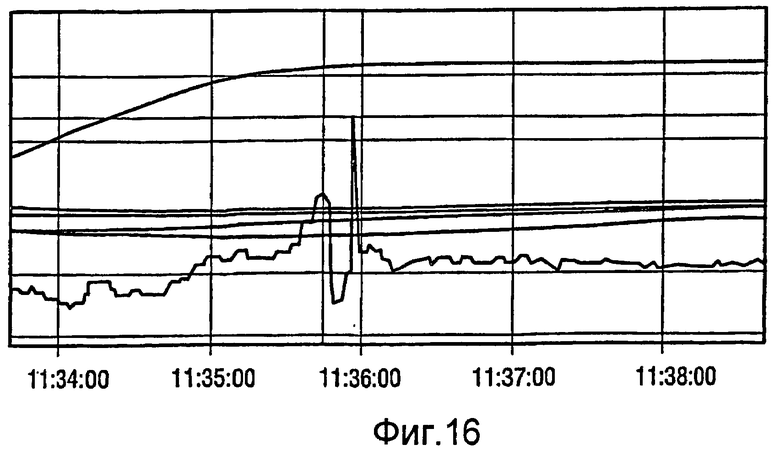
Так как здесь речь идет о линейном дифференциальном уравнении, то решение состоит из однородной части, которая зависит от начальных условий (например, столкновения при включении сцепления), и особой части, обусловленной приводом вала. Оба решения перекрываются, благодаря чему они могут рассматриваться по отдельности. С учетом затухания однородное решение спустя короткое время затухает.Фиг.16 (измерение колебаний вала в опытной установке 1 процесса включения сцепления) показывает измерение колебаний вала в первой опытной установке. Здесь можно ясно видеть большой пик в колебании при включении сцепления, который очень быстро затухает. После этого амплитуда колебаний достигает стационарного значения. Однородное решение уравнения движения определяет пиковое значение и не должно далее учитываться, так как здесь рассматриваются только стационарные колебания вала.
Напротив, конкретное решение дает соответственно местоположение S и W в стационарном режиме и тем самым амплитуда колебания вала после затухания процессов компенсации:

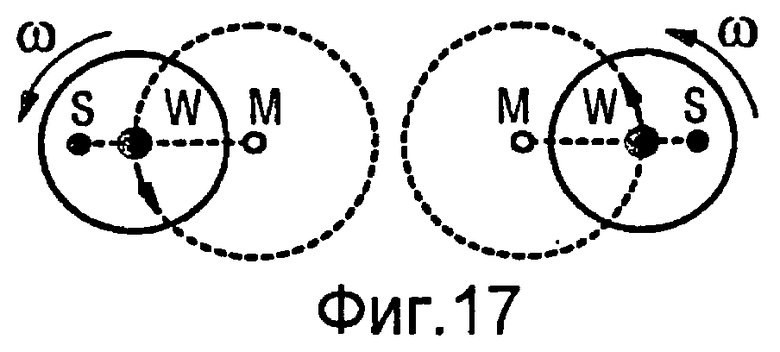
Средняя точка вала и центр тяжести перемещаются по круговой траектории (см. Фиг.17; средняя точка вала и центр тяжести движутся по круговой траектории, оба частичных участка вала имеют то же самое направление вращения и (меньше, чем ω0) в направлении вращения вала вокруг средней точки М вращения с синхронной угловой скоростью ω. При этом точки M, W и S лежат на прямой.
При приведенных выше предположениях имеется критическая круговая частота ω0 соответственно в зависимости от массы и упругой прочности вала, при которой колебания вала становятся бесконечно большими. Ниже этой круговой частоты - подкритический режим - центр тяжести находится вне точки сквозного прохождения вала. При прохождении критического числа оборотов он совершает скачок фазы и перемещается при увеличивающемся числе оборотов - надкритический режим - ближе к средней точке. Этот процесс также называется автоматическим центрированием, так как амплитуда колебания вала становится меньше.
Из Фиг.17 становится очевидно, что два частичных участка вала также должны по возможности связываться вместе, если угол между пространственными векторами обоих центров тяжести вала составляет как раз 180°. В этом случае центры тяжести находятся на соответственно противолежащих сторонах и, по меньшей мере, частично компенсируют друг друга в своем действии. Поэтому новый центр тяжести связанной системы находится ближе к точке сквозного прохождения вала.
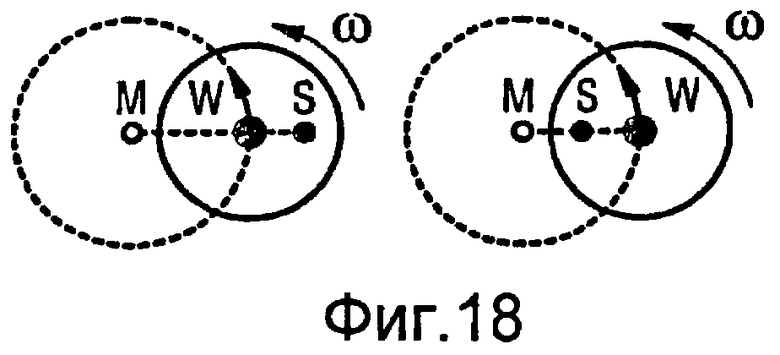
Если оба участка вала приводятся в действие с надкритическим числом оборотов, оба центра тяжести находятся внутри. Также здесь угол между пространственными векторами должен быть равным 180°. Если, напротив, один вал приводится в действие подкритически, и другой вал приводится в действие надкритически, угол должен составлять 0°, так как в этом случае центры тяжести расположены напротив друг друга, как можно видеть на Фиг.18 (слева - подкритически, справа - надкритически, оба частичных участка вала имеют одинаковое направление вращения).
Предпочтительным образом валы, в том числе из-за эффектов самоцентрирования, работают в надкритическом режиме, что означает упрощение при нахождении благоприятного угла сцепления φK (целевого угла, относительного угла кручения).
Если затухание принимается во внимание, то колебание вала при критической круговой частоте ограничивается конечным, но далее недопустимым значением. При прохождении ω0 центр тяжести не сразу перескакивает снаружи вовнутрь, а поворачивается в зависимости от коэффициента ослабления, более или менее медленно внутрь. Так как никакой вал не работает стационарно вблизи критической круговой частоты и упомянутый переход S происходит только вблизи нее, вышеназванные выводы остаются справедливыми.
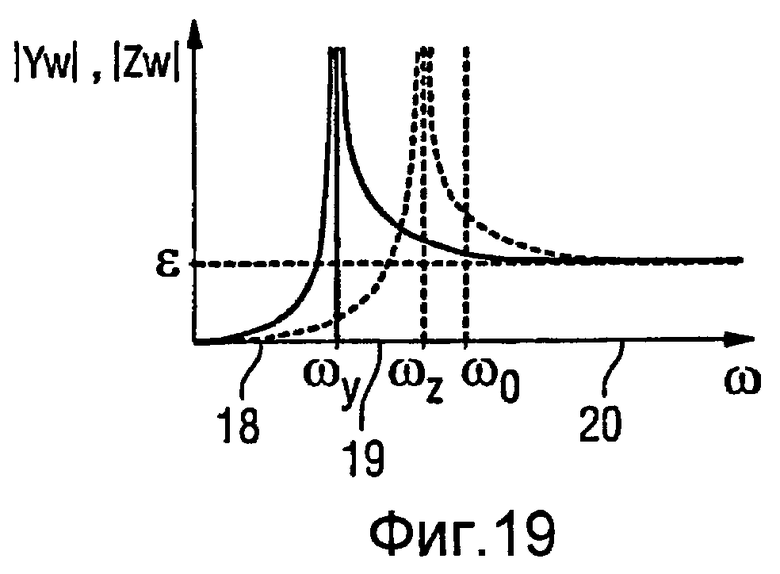
В большинстве случаев прочность опор может совместно приниматься во внимание, за счет чего критическая круговая частота, при обстоятельствах, значительно спадает. Здесь прежде всего проявляется анизотропия постоянной упругости в отношении обоих пространственных направлений. ω0 зависит от постоянной упругости и массы, то есть при различных значениях постоянных возникают две критические круговые частоты ωz и ωY, как правило, проявляющиеся в горизонтальном и вертикальном направлении. Таким образом, имеется дополнительный межкритический режим, в котором вал может приводиться в действие. Фиг.19 (отклонения вала отдельно по обоим пространственным направлениям) показывает в зависимости от круговой частоты различные по величине отклонения вала отдельно по пространственным направлениям. На оси ω представлены диапазоны: подкритический 18, межкритический 19 и надкритический 20.
В общем случае можно исходить из того, что применяемые в турбинном блоке опоры в горизонтальном направлении мягче, чем в вертикальном направлении. Поэтому здесь исходим из того, что горизонтальное y-критическое на оси круговой частоты всегда следует перед z-критическим. Оба значения меньше, чем критическая круговая частота при жестких опорах.
Ввиду анизотропии опор средняя точка вала перемещается по эллиптической траектории, которая обозначается как орбита. Эта орбита и тем самым средняя точка вала на различных местах участка вала измеряются соответственно двумя датчиками пути и предоставляются в распоряжение для определения благоприятного угла сцепления φK (целевого угла, относительного угла кручения). Не измеряемое непосредственно положение центра тяжести относительно средней точки вала остается при подкритических круговых частотах принципиально снаружи, а при надкритических - внутри. На этом месте следует еще рассмотреть его ход изменения при межкритических значениях.
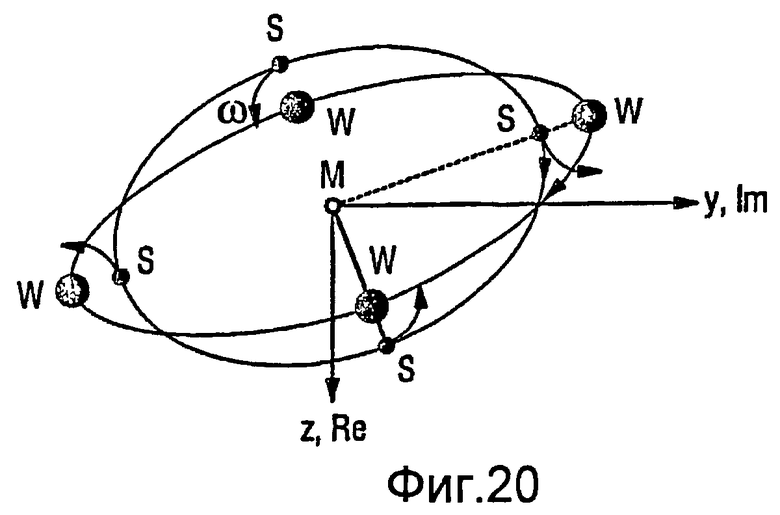
Фиг.20 (возможное изменение S и W между критическими круговыми частотами) показывает орбиты S и W между двумя критическими круговыми частотами. Обе имеют противоположное направление вращения относительно вращения вала. Центр тяжести S вращается, кроме того, с валом вокруг W и изменяет, таким образом, свое относительное положение во время вращения. Он находится относительно подкритического пространственного направления снаружи, а надкритического пространственного направления - внутри.
Если два межкритических вала должны сцепляться, то центры тяжести находятся тогда точно один напротив другого, когда разность фаз векторов средних точек валов составляет именно 180°.
Изменение фазы эллиптической орбиты, в противоположность круговому движению, во время поворота непостоянно, причем сравнение фаз обоих векторов орбит не дает применимого результата. Также должен быть найден другой путь из измеренных данных, чтобы оценивать мгновенное положение центров тяжести в зависимости от угла сцепления.
В применяемой здесь системе координат оси лежат, только для наглядности, по горизонтали и соответственно вертикали. Также большие полуоси орбит лежат не обязательным образом по горизонтали. Положение системы координат является свободно выбираемым и может устанавливаться на местах измерений. Однако одинаковую систему координат следует применять для обоих частичных участков вала.
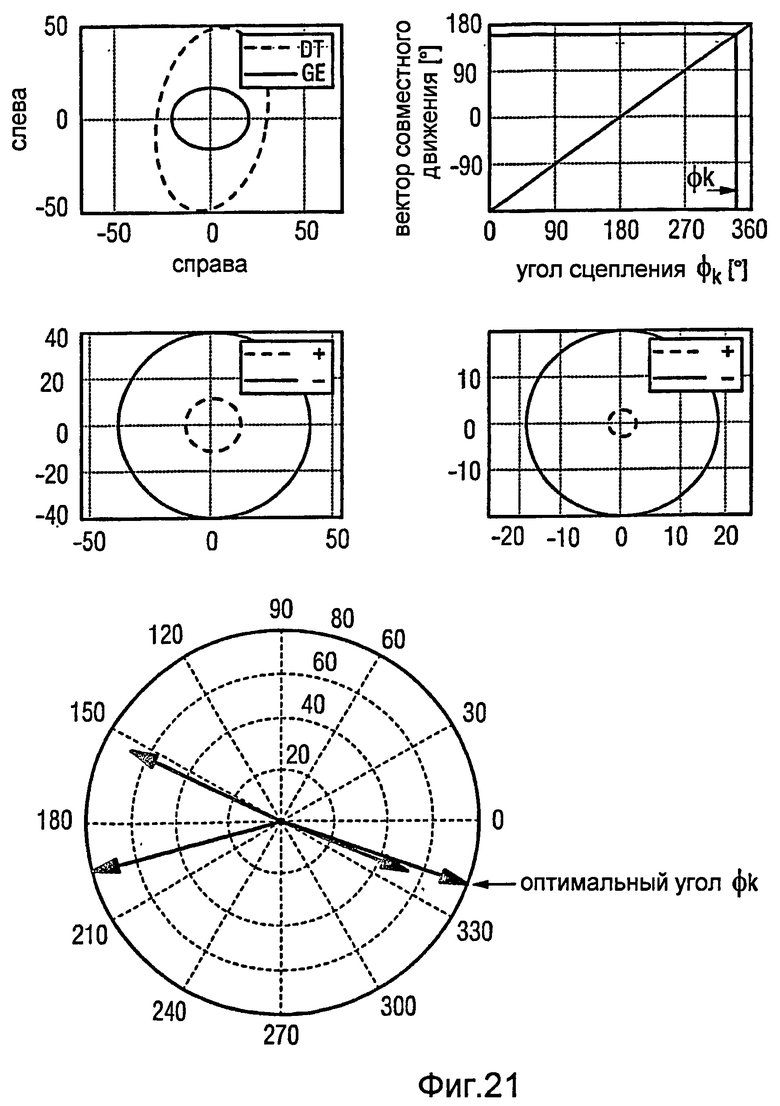
Для того чтобы реализовать изложенные выше принципы, необходимо применить методы комплексных вычислений к предоставленным данным измерений. Далее эти методы выводятся формально, и представляется применение данных измерений опытных установок 1-3 (Фиг.21-23), причем опытная установка 1 приведена на Фиг.23.
Каждые два измерения колебаний проводятся для обоих частичных участков вала вблизи муфты или SSS-муфты. Предпочтительное обозначение мест измерений определено на Фиг.24 (определение для обозначения мест измерений). В случае вала левого вращения левый датчик находится на левой стороне, что соответствует мнимой части (Im), а правый датчик - на правой стороне, что соответствует правой части (Re).
Для обоих частичных участков вала определяется по одному импульсному сигналу на поворот для определения числа оборотов, из временной разности которых может определяться относительный угол кручения. Разность в (4) определяется как относительный угол φk:

Для оценки колебание частоты вращения отфильтровывается по амплитуде  и фазе φ (по отношению к соответствующему собственному сигналу числа оборотов) для каждого из четырех сигналов. Эти сигналы представляются как комплексные пространственные вектора. Тем самым эти сигналы представляются в следующей форме:
и фазе φ (по отношению к соответствующему собственному сигналу числа оборотов) для каждого из четырех сигналов. Эти сигналы представляются как комплексные пространственные вектора. Тем самым эти сигналы представляются в следующей форме:

Индексы l и r относятся к левому и правому датчикам. В последующем установлены еще формулы для стороны газовой турбины, так как для уравнения паровой турбины должны быть только заменены индексы и удален φk.
Эллиптические траектории, по которым перемещаются точки сквозного прохода вала, можно математически представить как суперпозицию двух противоположно проходящих круговых движений с одинаковой угловой скоростью, но с различными радиусом.
Для этого к (5) применяются известные уравнения Эйлера:

Уравнение (6), подставленное в (5) для средней точки вала стороны газовой турбины, дает:

Путем вынесения за скобки eiωt и соответственно e-iωt и разделения на положительную и отрицательную экспоненты получается следующее уравнение:

При этом  является радиусом круговой траектории, которая обозначается как составляющая совместного движения орбиты, а
является радиусом круговой траектории, которая обозначается как составляющая совместного движения орбиты, а  - радиус круга с обозначением составляющей противоположного движения. При этом составляющая совместного движения и составляющая противоположного движения относятся к направлению вращения вала. Соответствующее фазовое положение содержится в и в . На Фиг.21-23 приведено подобное разложение с измеренными данными.
- радиус круга с обозначением составляющей противоположного движения. При этом составляющая совместного движения и составляющая противоположного движения относятся к направлению вращения вала. Соответствующее фазовое положение содержится в и в . На Фиг.21-23 приведено подобное разложение с измеренными данными.
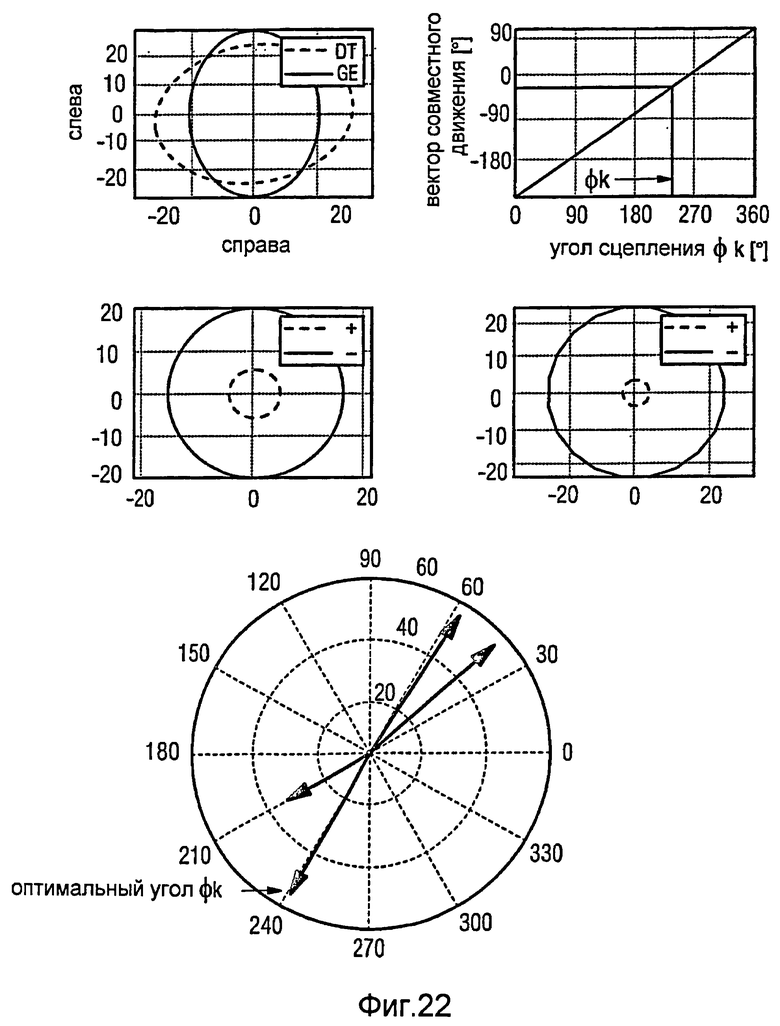
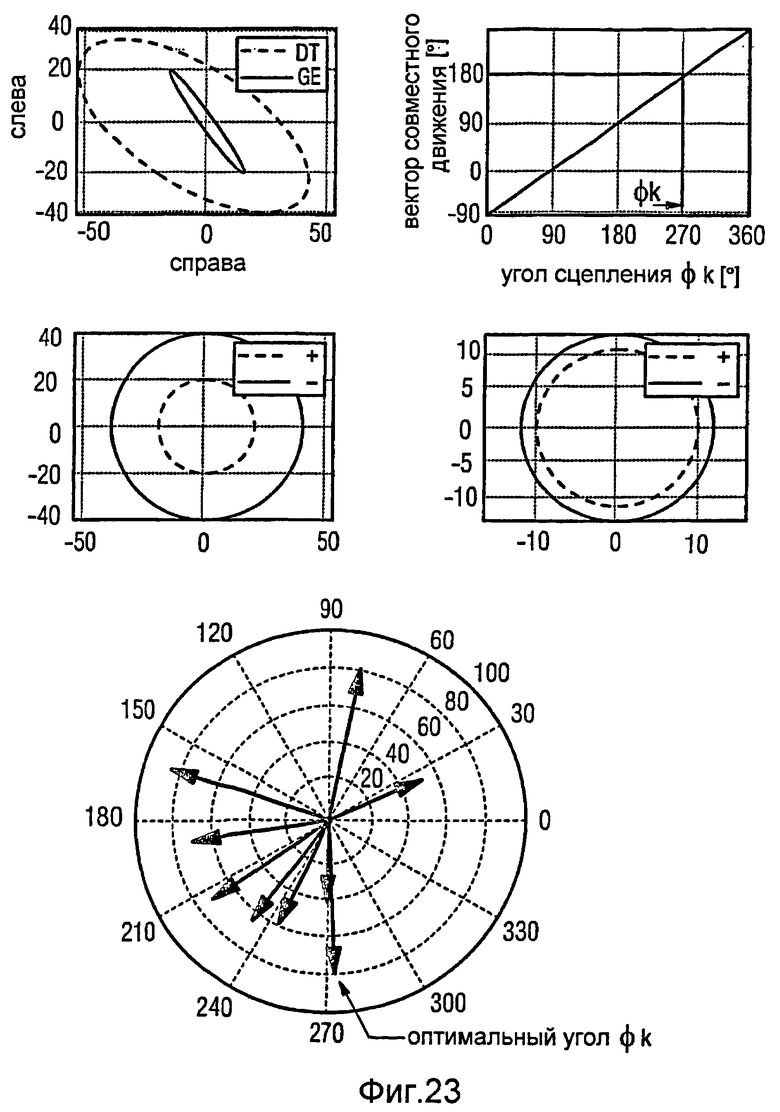
На Фиг.21-23 представлены соответственно сверху слева орбиты частичных участков вала, сверху справа разность фаз вектора совместного движения, в середине слева составляющая совместного движения и составляющая противоположного движения паровой турбины, в середине справа составляющая совместного движения и составляющая противоположного движения генератора и внизу - карта (диаграмма) сцепления.
Центр тяжести S вала, который в обоих участках вала должен располагаться по возможности один напротив другого, перемещается с синхронной круговой частотой (в направлении вращения вокруг точки W сквозного прохода вала.
Отсюда следует уравнение (9) для траектории S:

При этом ε - расстояние от S до W. После подстановки (8) получается следующее уравнение для rS,GT:

Угол φ0 является постоянным значением и зависит от затухания круговой частоты. Очевидно, что только радиус и фаза составляющих совместного движения центра тяжести и средней точки вала различны, причем составляющие противоположного движения для обеих точек одинаковы.
Далее принимается, что совместно перемещающийся вектор определяется разбалансировкой, а противоположно перемещающийся вектор представляет анизотропию реакции опор:

В предположении, что только результирующая разбалансировка зависит от угла сцепления, для нахождения благоприятного угла принимаются во внимание составляющие совместного движения колебания вала.
В случае составляющих совместного движения речь идет о круговых орбитах, амплитуда и угловая скорость которых постоянны во время оборота. При различных числах оборотов обоих валов может осуществляться сравнение фазового положения. Так как согласно уравнению (10) амплитуда составляющей совместного движения центра тяжести постоянна, это сравнение дает предпочтительным образом также вывод о его положении.
Чтобы определить оптимальный угол сцепления φК (целевой угол, угол кручения), необходимо определить разность фаз вектора совместного движения стороны паровой турбины и газовой турбины. Для этого паровая турбина при, например, -10 об/мин подсинхронно, а газовая турбина с синхронным числом оборотов стационарно приводятся в действие. После обработки измерений колебаний, как описано выше, имеются вектора совместного движения с величиной и фазой для обоих частичных участков вала. За счет малой разности в угловой скорости медленно изменяется относительный угол кручения φК и тем самым также фазовое положение векторов совместного движения. Углы изменяются при этом с одинаковой скоростью.
В зависимости от того, работают ли валы в надкритическом, межкритическом или подкритическом режиме, разность фаз участков вала должна составлять 0° или 180°, чтобы центры тяжести располагались по возможности противоположно друг другу и тем самым взаимно компенсировались по своему действию. В этот момент времени угол кручения соответствует непосредственно благоприятному углу сцепления. Он должен сохраняться в соответствующем устройстве автоматизации и применяться при регулировании в качестве целевого угла.
На Фиг.25 (фазовое положение векторов совместного движения при благоприятном угле сцепления) показана разность фаз векторов совместного движения, при которой, на базе теоретических предпосылок, получается благоприятный угол сцепления.
Упорядочение соответствующих экспериментальных установок в таблице (Фиг.25) может происходить при разложении орбит на составляющую совместного движения и составляющую противоположного движения. Участки валов в межкритическом режиме работы имеют противоположно направленные орбиты. Это соответствует случаю, когда величина составляющей противоположного движения больше, чем величина составляющей совместного движения. Это рассмотрение проводилось с измеренными данными трех экспериментальных установок, как можно видеть на Фиг.25.
Для сравнения имеются измерения из трех различных установок, причем обрабатываемые здесь колебания вала были определены в переходном режиме числа оборотов.
Фиг.21 показывает этапы для определения благоприятного угла сцепления на примере ГиП экспериментальной установки 2. На чертеже сверху слева представлены орбиты обоих частичных участков валов. Изображения на второй строке показывают разложение на составляющую совместного движения и составляющую противоположного движения. Изображение сверху справа показывает разность фаз векторов совместного движения относительно угла сцепления φК. В этом случае исходят из того, что оба вала работают надкритически, т.е. разность фаз векторов совместного движения должна составлять точно 180°, чтобы имелся благоприятный угол сцепления φК. На этом частичном изображении по отношению к Фиг.21 можно также хорошо видеть, что фазы векторов совместного движения изменяются так же быстро, как угол сцепления φК.
На чертеже снизу изображения карта сцепления с тремя измеренными колебаниями вала. Длина векторов соответствует колебаниям после затухания всех процессов компенсации, причем угол, при котором они нанесены, соответствует измеренному углу сцепления. В качестве дополнительного вектора изображен определенный оптимальный угол сцепления φК. Положение этого вектора не имеет никакого значения и только для наглядности выбрано большим. Очевидно, определенный угол лежит в диапазоне меньших колебаний на диаграмме сцепления.
Фиг.22 показывает результаты для экспериментальной установки 3. В этом случае газовая турбина работает в межкритическом режиме (составляющая противоположного движения больше, чем составляющая совместного движения), а паровая турбина - в надкритическом режиме. В этом случае был определен угол сцепления при разности фаз 0°. Диаграмма сцепления показывает, что также этот угол сцепления φК лежит в благоприятном диапазоне.
В случае экспериментальной установки 1 (Фиг.23) для обоих частичных участков вала вектора противоположного движения больше, чем вектора совместного движения. Оптимальный угол сцепления соответствует тогда разности фаз 180°. В этой установке было доступно больше измеренных данных, что можно видеть на диаграмме сцепления. Благоприятный угол сцепления лежит и здесь при меньших колебаниях.
Предпочтительным образом вводится число оборотов удерживания порядка предпочтительно - 10 об/мин, из которого может быть достигнут заданный целевой угол с любыми переходными числами оборотов. Разность Δφ между начальным углом и целевым углом или углом сцепления является постоянной для конкретной установки по отношению к углу сцепления φК и может поэтому измеряться при пуске в эксплуатацию.
В уровне техники сигнал KUPE, который указывает сцепленное состояние, устанавливается слишком рано. Посредством способа, соответствующего изобретению, предлагается сигнал устанавливать ближе к собственно процессу включения сцепления.
Импульсные сигналы, которые для определения числа оборотов соответственно выдаются как сигнал на каждый оборот, являются непосредственной мерой для определения относительного кручения привода (стороны паровой турбины) и отбора мощности (стороны газовой турбины). В уровне техники этот угол (угол сцепления или относительный угол кручения φК) является чисто случайным и может принимать все значения, зависимые от количества зубцов фиксатора.
Для стационарного режима имеется более благоприятное состояние сцепления, когда центры тяжести частичных участков вала расположены противоположно по отношению к средним точкам вала и тем самым по своему действию частично компенсируются.
Благоприятные углы сцепления могут быть реализованы, если газовая турбина находится в номинальном режиме, а паровая турбина - при числе оборотов удерживания. Определенные в местах измерения вблизи SSS-муфты колебания вала разлагаются с помощью комплексных методов вычисления на составляющую совместного движения и составляющую противоположного движения. Сравнение фазового положения обоих векторов совместного движения позволяет сделать вывод относительно благоприятного угла сцепления. При этом должно приниматься во внимание номинальное число оборотов вала по отношению к критическим числам оборотов.
Если в существующих установках имеется диаграмма сцепления, то угол непосредственно вводится в качестве целевого угла в регулирование.

Изобретение относится к способу сцепления приводного вала машины для превращения кинетической энергии в механическую с валом отбора мощности. Машина для превращения кинетической энергии в механическую энергию разгоняется до числа оборотов, подсинхронного по отношению к приводному валу, и удерживается на этом числе оборотов удерживания, прежде чем сигнал используется для запуска сцепления. Сигнал для запуска сцепления устанавливается тогда, когда разность фаз вектора совместного движения частичных участков вала такова, что оба центра тяжести противолежат друг другу. Технический результат изобретения - включение сцепления осуществляется при наименьшем значении колебания, причем весь участок вала должен становиться и оставаться сбалансированным. 7 з.п. ф-лы, 25 ил.
1. Способ сцепления приводного вала машины для превращения кинетической энергии в механическую энергию с валом отбора мощности посредством муфты,
причем машина для превращения кинетической энергии в механическую энергию разгоняется до числа оборотов, подсинхронного по отношению к валу отбора мощности, и удерживается на этом числе оборотов удерживания, прежде чем сигнал используется для запуска сцепления,
отличающийся тем, что
сигнал для запуска сцепления устанавливается тогда, когда разность фаз вектора совместного движения частичных участков вала такова, что оба центра тяжести противолежат друг другу.
2. Способ по п.1, отличающийся тем, что число оборотов удерживания имеет величину 10 об/мин по отношению к валу отбора мощности.
3. Способ по п.1 или 2, отличающийся тем, что определяется относительный угол кручения обоих частичных участков вала.
4. Способ по п.1, отличающийся тем, что сигнал для запуска сцепления далее блокируется, так что в этом расцепленном состоянии обоих частичных участков вала колебания вала могут определяться и сравниваться.
5. Способ по п.4, отличающийся тем, что проводится по два измерения колебаний для обоих частичных участков вала.
6. Способ по п.1, отличающийся тем, что для обоих частичных участков вала определяется по одному импульсному сигналу на каждый оборот для определения числа оборотов.
7. Способ по п.1, отличающийся тем, что определяется разность фаз векторов совместного движения приводного вала и вала отбора мощности.
8. Способ по п.2, отличающийся тем, что относительный угол кручения сохраняется в приборе автоматизации и применяется в регулировании.
| US 2005183422 А1, 25.08.2005 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| JP 10184317 А, 14.07.1998 | |||
| РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2003 |
|
RU2250387C2 |
| СПОСОБ ЗАПУСКА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ С ОХЛАЖДАЕМОЙ ТУРБИНОЙ | 2003 |
|
RU2252327C1 |

