Изобретение относится к машиностроению и может быть использовано в различных механизмах для преобразования равномерного вращательного движения в возвратно- поступательное с участками постоянной скорости.
Цель изобретения повышение долговечности механизма путем устранения ударов кулачка о ролики толкателя.
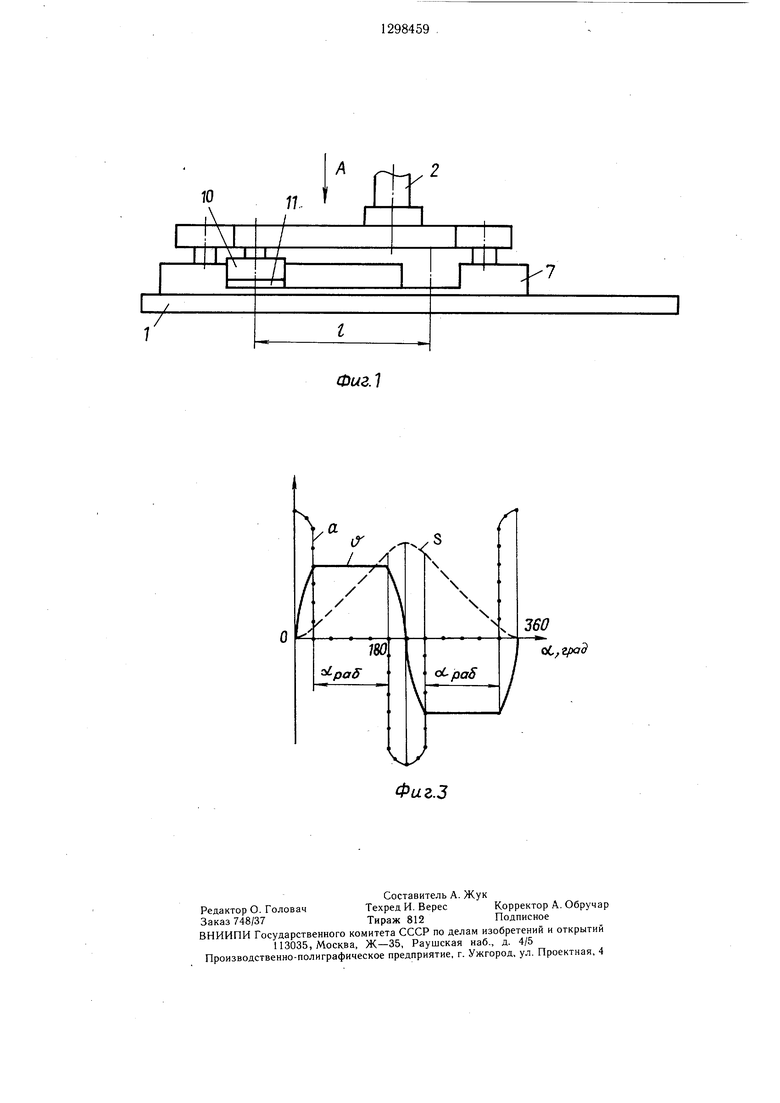
На фиг. 1 изображена принципиальная схема механизма; на фиг. 2 - вид А на фиг. Ij на фиг. 3 - кинематические характеристики механизма (S, v и а - соответственно пере- меш.ение, скорость и ускорение толкателя при повороте кулачка на угол а; а - рабочий угол кулачка).
Кулачковый механизм содержит направ- ляюш,ие 1 поступательного движения, вал 2, на котором жестко закреплен кулачок 3, боковые поверхности 4 и 5 профиля которого очерчены двумя симметричными эвольвентами, образованными концами производя- ш.его отрезка АВ при перекатывании его на рабочий угол араб по основной окружности 6, центр которой совпадает с центром вращения кулачка 3. На толкателе 7 установлены две пары роликов 8, оси которых расположены в углах прямоугольника, одна сторона которого параллельна направляющим 1, ее длина равна сумме длины производящего отрезка АВ и диаметра ролика 8, а длина второй стороны прямоугольника равна диаметру основной окружности 6. На кулачке 3 установлена ось 9 с роликом 10, ось которого проходит через точку пересечения производящего отрезка АВ в его крайних положениях образования эвольвент. В толкателе 7 выполнены два прямоугольных паза 11,, расположенных перпендикулярно направляющим 1, ширина каждого паза равна диаметру ролика 10 кулачка 3, длина - диаметру основной окружности 6, а расстояние / между ними равно произведению диаметра основной окружности 6 на инволюту половины рабочего угла кулачка 3.
Кулачковый механизм работает следующим образом.
При непрерывном вращении кулачка 3 и контакте боковых поверхностей 4 и 5 его профиля с одной парой (верхней) роликов 8 толкателя 7 происходит движение толкателя 7 с постоянной скоростью, продолжительность которого соответствует рабочему углу араб кулачка 3. В конце движения с постоянной скоростью боковые поверхности 4 и 5
выходят из контакта с верхней парой роликов 8, а ролик 10 кулачка 3 входит в один из пазов 11 (правый) толкателя 7, осуществляет перемещение толкателя 7 на переходном участке и выходит из паза. Далее боковые поверхности 4 и 5 вступают в контакт с второй парой (нижней) роликов 8, и происходит движение толкателя 7 с постоянной скоростью в обратном направлении, в конце которого ролик 10 входит во второй паз 11
(левый) и возвращает толкатель 7 в исходное положение.
Формула изобретения
Кулачковый механизм, содержащий основание, направляющие, размещенный в них с возможностью возвратно-поступатеьного перемещения толкатель с двумя парами роликов, оси которых расположены в углах
прямоугольника, одна из сторон которого параллельна направляющим, вал и установленный на нем с возможностью вращения кулачок, симметричные 6оковь1е поверхности которого предназначены для поочередного взаимодействия с соответствующей парой роликов и выполнены по двум эвольвентам, отличающийся тем, что, с целью повыщения долговечности механизма путем устранения ударов кулачка о ролики, он снабжен осью, жестко связанной с кулачком, и установленным с возможностью вращения на оси дополнительным роликом, эвольвенты боковых поверхностей кулачка образованы концами производящего отрезка при перекатывании его на рабочий угол по основной окружности эвольвент, центр которой лежит на оси
вращения кулачка, ось дополнительного ролика проходит через точку пересечения прямых, совпадающих с крайними положениями производящего отрезка, в толкателе выполнены два сквозных прямоугольных паза, оси которых перпендикулярны направляющим, щирина каждого паза равна диаметру дополнительного ролика, предназначенного для поочередного размещения в этих пазах, длина - диаметру основной окружности эвольвент, расстояние между осями пазов равно произведению диаметра основной окружности на инволюту половины рабочего угла кулачка, а длина стороны прямоугольника, в концах которой расположены оси роликов толкателя, равна сумме длины производящего отрезка и диаметра основного ролика.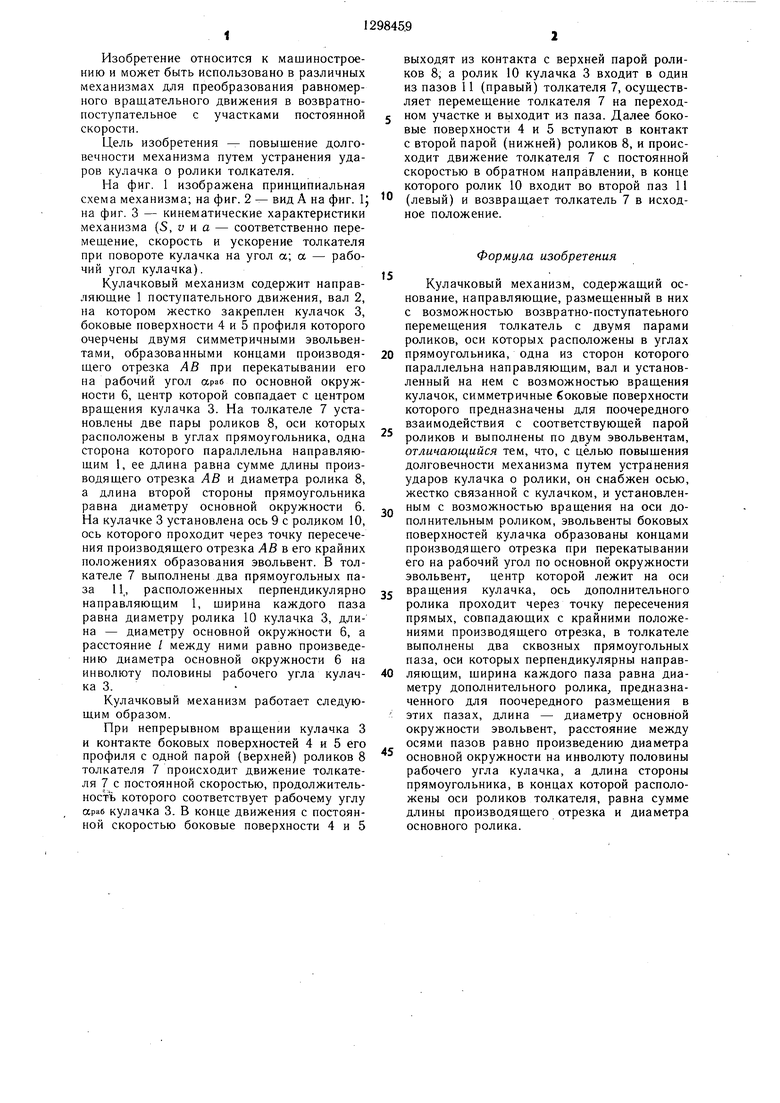
Изобретение относится к машиностроению, а именно к кулачковым преобразователям движения. Цель изобретения - повышение долговечности механизма за счет устранения ударов кулачка о ролики толкателя. Кулачковый механизм содержит направляющие 1, в которых с возможностью возвратно-постунательного перемещения установлен толкатель 7, выполненный с двумя пазами 11, перпендикулярными направляющим. На толкателе установлены две Вид1 пары роликов 8, оси которых расположены в углах прямоугольника, большая сторона которого параллельна направляющим 1. На валу 2 установлен кулачок 3, боковые поверхности 4 и 5 которого выполнены по эвольвентам и предназначены для поочередного взаимодействия с соответствующей парой роликов 8. На кулачке 3 жестко укреплена ось 9, на которой установлен дополнительный ролик 10, предназначенный для поочередного взаимодействия с пазами 11 толкателя 7. При вращении кулачка 3 его боковые поверхности 4 и 5, взаимодействуя с одной парой роликов 8, перемещают толкатель 7 в одну сторону. Затем толкатель 7 перемещает в ту же сторону дополнительный ролик 10, взаимодействуя с одним из пазов 11. Далее с другой парой роликов 8 вступают во взаимодействие боковые поверхности 4 и 5 кулачка, а с другим пазом 11 - дополнительный ролик 10, перемещая толкатель 7 в другую сторону. 3 ил. е (Л Ю со 00 4U ел со 8 Фиг. 2
| Артоболевский И | |||
| И | |||
| Механизмы в современной технике.-М.: Наука, 1975, т | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Шкив для канатной передачи | 1920 |
|
SU109A1 |
| Приспособление для контроля движения поездов | 1924 |
|
SU845A1 |
