Изобретение относится к области водолазного оборудования и может быть применено для контроля состояния группы мобильных подводных пловцов с целью обеспечения безопасности жизнедеятельности в ходе подводных работ, спортивного плавания, лечебной физкультуры и т.д.
Известны физические и физиологические параметры безопасности человека при движении под водой, подлежащие постоянному контролю. К физическим параметрам относят координаты пловца, глубину погружения, температуру, плотность и скорость течения воды, время нахождения в воде, к физиологическим - состояние сердечно-сосудистой системы, уровень азота в крови и т.д.
В патенте US 7,257,51782, МПК G06F 17/40, от 14.08.2007, «Detection apparatus, detection system, portable device, and machine readable medium» система, размещаемая на пловце, производит измерение пройденного пути, скорости движения, времени нахождения в воде, температуры, плотности и скорости течения воды, на основе этих данных вычисляет количество потраченных человеком калорий и отображает на наручном дисплее пловца. Подобные системы используются только для спортивных или восстановительных тренировок и имеют низкую функциональность с точки зрения обеспечения безопасности человека.
В патенте US 7,144,198 B2, МПК B63C 11/02, от 05.12.2006, «Diver information processing apparatus and method of controlling same» система, помимо измерения глубины погружения и температуры воды, содержит датчик азота в выдыхаемом человеком воздухе, что позволяет вовремя сигнализировать пловцу об опасности декомпрессии и замедлить подъем на поверхность воды.
Известны различные системы определения координат подводных пловцов [1, 2]. Например, в патенте US 7,512,036 B2, МПК G01S 3/80, от 31.03.2009, «Underwater acoustic positioning system and method» координаты пловца определяются с помощью известной акустической системы навигации с длинной базой [1, с.49], основанной на использовании трех GPS-буев, расположение которых ограничивает район подводных работ.
Недостатком всех рассмотренных ранее систем является то, что вся информация о состоянии подводного пловца отображается только на дисплее самого пловца, без передачи на наземную станцию контроля, что в случае опасности не позволяет принять мер по спасению человека.
Кроме того, ни одна из известных систем не обладает функциональностью, необходимой для полного контроля состояния подводного пловца.
Наиболее близким к предлагаемому изобретению является изобретение «Метод и устройство для определения координат подводного пловца (пловцов) с наземной станции и оповещения наземной станции об опасности подводного пловца» (Method and apparatus for locating diver(s) from a surface station and alerting the surface station of a diver emergency), патент US 6,108,272 B2, МПК H04B 11/00, опубликован 22.08.2000.
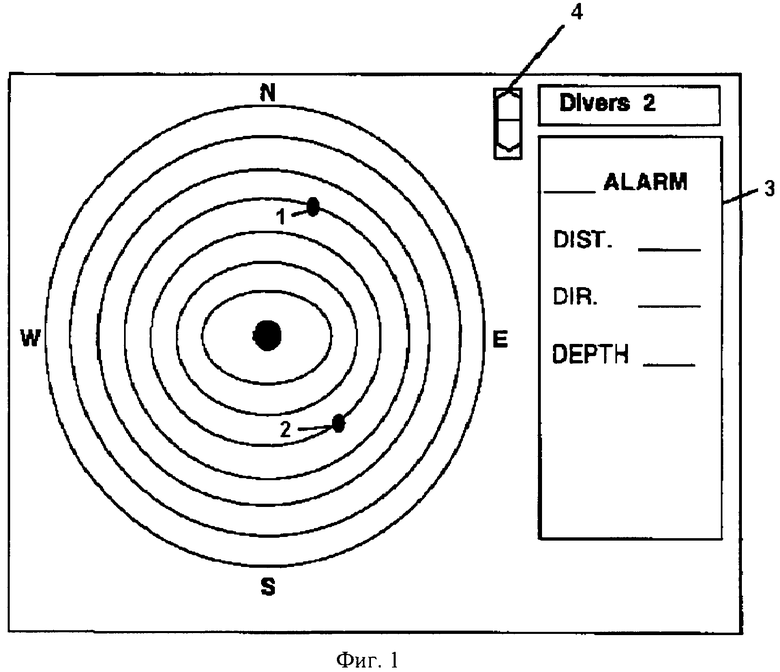
В данном изобретении устройство, размещаемое на пловце, совместно с наземной станцией образуют гидроакустическую систему со сверхкороткой базой для определения пеленга, глубины и дальности погружения пловца, основанную на измерении прямого и обратного времени прохождения акустического сигнала от пловца к станции. Данная информация отображается на дисплее пловца в цифровом виде и на наземной станции в виде карты дна с расположением пловцов. На Фиг.1 показано изображение на экране ЭВМ наземной станции. Текущие параметры пловцов 1 и 2 - тревога, дальность, пеленг, глубина, могут быть показаны в окне 3 и могут быть выбраны для конкретного пловца переключателем 4. Определение навигационных параметров различных пловцов осуществляется на различных гидроакустических частотах. На устройстве пловца есть кнопка тревоги, при нажатии на которую вырабатывается гидроакустический сигнал на частоте, различной для каждого пловца. Этот сигнал принимается наземной станцией и вызывает срабатывание светового и звукового тревожного оповещения.
Достоинствами данного изобретения являются:
1) возможность контроля параметров нескольких пловцов;
2) отображение координат пловца на наземной станции, что позволяет в случае тревоги осуществить быстрое нахождение и спасение человека.
Недостатками данного изобретения являются:
1) ручная подача сигнала тревоги не позволяет спасти человека при потере сознания, травмах и т.д.;
2) недостаточная функциональность системы - нет контроля состояния физиологических параметров;
3) использование множества гидроакустических частот значительно усложняет систему;
4) невысокая точность определения координат пловца из-за использования навигационной системы со сверхкороткой базой.
Технической задачей предложенного изобретения является увеличение надежности и функциональности системы контроля состояния подводных пловцов для обеспечения безопасности нахождения человека под водой путем непрерывного контроля физических и физиологических параметров пловцов с автоматическим формированием сигнала тревоги при выходе этих параметров за заданные пределы и определения точных географических координат пловца с помощью одночастотной навигационной системы с длинной базой и синхронизацией по спутниковой глобальной системе позиционирования (Global Positioning System, GPS).
Известно, что наилучшую точность определения координат подводных объектов обеспечивают гидроакустические системы с длинной измерительной базой [1]. В современных системах измерительную базу образуют три буя с GPS-приемниками, образующие треугольник со стороной 1…5 км. Для определения координат и обеспечения синхронности передач нескольких подводных пловцов в предлагаемом изобретении персональный прибор каждого пловца оснащается высокостабильными часами, предварительно синхронизированными по часам GPS. Гидроакустический излучатель (гидрофон) определенного подводного пловца излучает сигнал только в свой предустановленный момент времени в зависимости от номера, присвоенного пловцу, - гидрофон пловца i излучает свой сигнал в момент времени i·T, гидрофон пловца i+1 - в момент времени (i+1)·T, и т.д. Время T в предлагаемом изобретении складывается из времени передачи и доставки сигнала от одного пловца и интервала такой же длительности для передачи и доставки тревожных сообщений от любого пловца или команды от наземной станции.
Время передачи и доставки сигнала от одного пловца t складывается из времени передачи tn и времени распространения сигнала по наибольшей длине измерительной базы (между наиболее удаленными буями) tl:
t=>tn+tl.
Время T равно удвоенному времени t, следовательно, сигналы от n пловцов будут переданы за время
T=n·2·t.
Во время передачи могут передаваться данные о любых физических и физиологических параметрах пловца, заранее выбранных или изменяемых по команде наземной станции. Для обмена данными между пловцом и базой существуют известные гидроакустические методы передачи данных со скоростями 4800 бит/с и выше [3], достаточными для передачи любых параметров в реальном времени. Например, известно, что при регистрации электрокардиограммы (одного отведения) в режиме «мониторинг» скорость цифрового потока данных составляет не более 1200 бит/с [4].
Например, от пловца со скоростью 4800 бит/с передается информационная посылка, которая содержит данные о глубине погружения (0…40 м), температуре воды (0…30°C), частоте сердечных сокращений (20…200 ударов/мин), уровне азота в выдыхаемом пловцом воздухе (0…100%). С учетом дополнительных данных для синхронизации и восстановления информации на приемной стороне объем такой посылки не превысит 10 байт, а длительность посылки, т.е. время передачи от пловца, составит
tn=10·8·(1/4800)=0,017 с.
Время распространения сигнала между буями при средней скорости звука в воде 1500 м/с и максимальном расстоянии между буями 1000 м составит
tl=1000/1500=0,667 с.
Следовательно, интервал T между передачами пингеров пловцов должен быть не менее
Т=2·t=>2·(0,017+0,667)≈1,4 с.
Все буи должны за время t передать параметры пловца и свои координаты на наземную станцию. Время обработки данных и вывода на дисплей ЭВМ наземной станции должно также быть менее времени t. При выполнении этих условий осуществляется мониторинг параметров пловцов со скоростью 10 пловцов / 14 секунд (т.е. обновление координат и состояния группы из 10 подводных пловцов полностью завершается за 14 с).
В предлагаемом изобретении пауза между информационными посылками той же длительностью t используется для передачи тревожных сообщений от любого пловца на наземную станцию или для передачи команды от наземной станции к конкретному пловцу. Передача тревоги производится в ближайшей паузе, причем тревожная посылка содержит номер аварийного пловца. Команда от наземной станции производится также в ближайшей паузе между информационными посылками.
Для предотвращения наложений гидроакустических сигналов в предлагаемом изобретении все передачи от пловца производятся только в предустановленные моменты времени, по временным меткам высокостабильных часов устройства подводного пловца, предварительно синхронизированных по часам GPS, а все передачи от буев и наземной станции синхронизированы по часам их GPS-приемников.
В предлагаемом изобретении формирование тревожного извещения от пловца может производиться двумя способами - ручным способом, при нажатии пловцом тревожной кнопки, и автоматическим способом. Автоматическое генерирование тревожного события производится при выходе любого физического или физиологического параметра за заранее заданные пределы, которые могут быть уникальны для каждого пловца. Например, это может быть погружение ниже заданной глубины, выход частоты сердечных сокращений за пределы нормы, превышение доли азота в выдыхаемом воздухе и т.д.
Возникновение тревожного события, кроме передачи тревоги, сопровождается оповещением самого пловца (например, виброзвонком).
Таким образом, техническим результатом является увеличение надежности и функциональности системы контроля состояния подводных пловцов для обеспечения безопасности нахождения человека под водой путем непрерывного контроля физических и физиологических параметров пловцов с автоматическим формированием сигнала тревоги при выходе этих параметров за заданные пределы и определения точных географических координат пловца с помощью одночастотной навигационной системы с длинной базой и GPS-синхронизацией.
Заявленный технический результат обеспечивается за счет системы контроля состояния подводных пловцов. Задача решается следующим образом. Система контроля состояния подводных пловцов, состоящая из наземной станции, содержащей ЭВМ с программой вычисления координат и отображения состояния пловцов на экране, световой и звуковой тревожные оповещатели, как минимум одного подводного пловца, снабженного гидрофоном и кнопкой передачи тревожного извещения, согласно заявляемому техническому решению отличается тем, что дополнительно содержит буи в количестве не менее трех, расположенные на поверхности моря, причем буи снабжены GPS-приемником, гидрофоном, микроконтроллером и радиомодемом, наземная станция дополнительно содержит радиомодем и GPS-приемник, подводный пловец дополнительно снабжен высокостабильными часами, предварительно синхронизированными по часам GPS, датчиками физических и физиологических параметров и микроконтроллером для обработки сигналов датчиков и автоматического формирования тревожного извещения.
В качестве контролируемых физических параметров могут выступать: координаты пловца, глубина погружения, температура и скорость течения воды и т.д.
В качестве контролируемых физиологических параметров могут выступать: состояние сердечно-сосудистой системы пловца, уровень азота в крови и т.д.
Сущность изобретения отображена на чертежах, иллюстрирующих систему контроля состояния подводных пловцов.
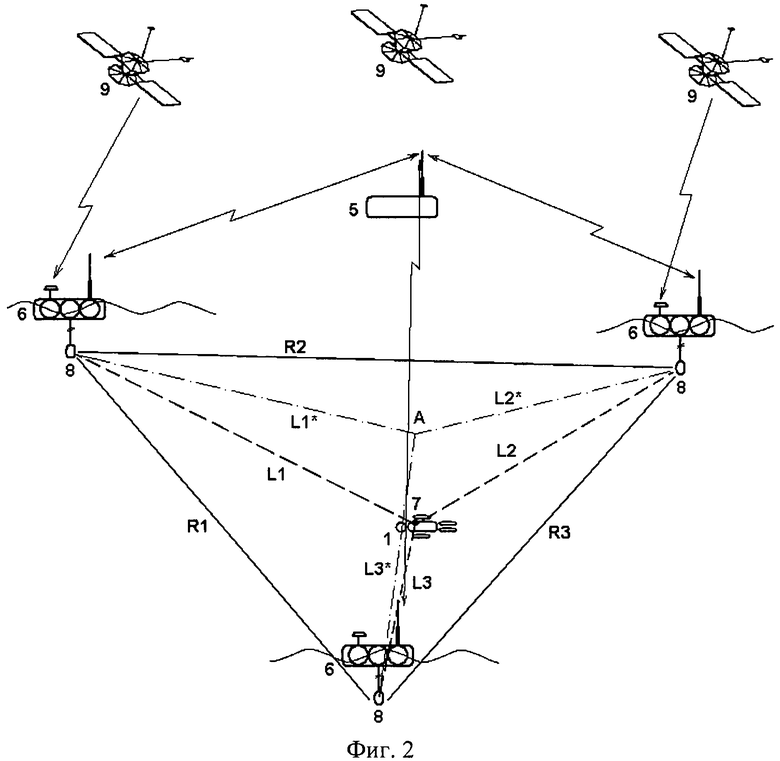
На Фиг.2 изображена общая схема системы определения координат в аксонометрии.
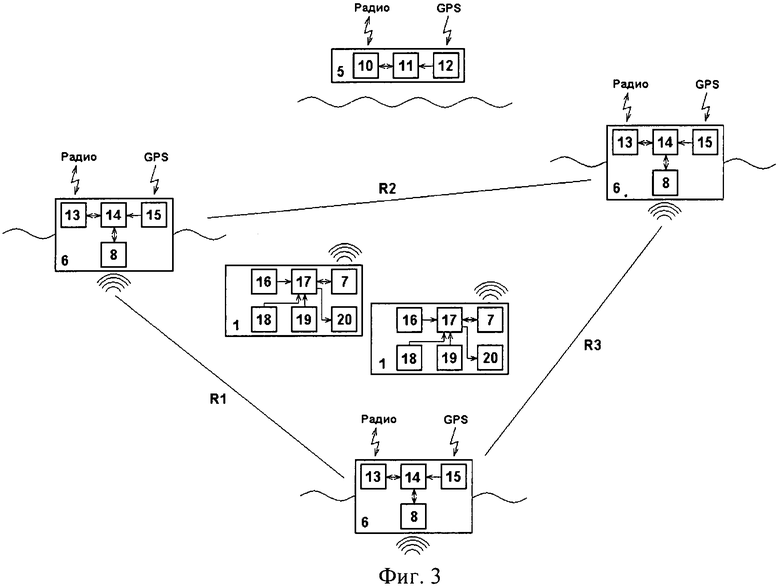
На Фиг.3 изображена структурная схема узлов системы контроля состояния подводных пловцов.
Сущность определения координат поясняется на Фиг.2, где 1 - подводный пловец, 5 - наземная станция, 6 - буи на морской поверхности, 7 - гидрофон пловца, R1, R2, R3 - горизонтальные расстояния между буями на поверхности моря, формирующие измерительную базу гидроакустической навигационной системы, L1, L2, L3 - наклонные дальности от подводного пловца 1 до гидрофона 8 каждого из буев, L1*, L2*, L3* - проекции наклонных дальностей на поверхность моря, А - точка проекции подводного пловца на поверхность, 9 - спутниковая группировка системы GPS.
Гидрофон 7 подводного пловца 1 по временной метке часов, синхронизированных с GPS-часами буев 6, в предустановленный для каждого пловца момент времени излучает сигнал, содержащий информационную посылку с параметрами пловца. Этот сигнал, принимаемый гидрофоном 8 каждого буя 6, запаздывает относительно временной метки GPS-часов буев на величину, пропорциональную наклонным дальностям от подводного объекта до каждого буя. Измеренное с помощью микроконтроллера буя время запаздывания, пропорциональное наклонным дальностям, совместно с собственными координатами, полученными с GPS-приемника, и глубиной погружения пловца каждый буй передает на наземную станцию 5 по радиоканалу. Наземная станция 5 принимает данные по радиоканалу и вводит эту информацию в ЭВМ, где по известному алгоритму вычисляются координаты каждого подводного пловца и выводятся на дисплей в виде точек на карте моря и в виде цифровых данных.
Состав системы приведен на Фиг.3.
Система состоит из наземной станции 5, как минимум трех буев 6 и как минимум одного подводного пловца 1.
Наземная станция содержит радиомодем 10, ЭВМ 11 с программой обработки данных и вывода на дисплей и GPS-приемник 12.
Каждый буй 6 содержит радиомодем 13, микроконтроллер 14, GPS-приемник 15 и гидрофон 8.
Каждый подводный пловец 1 содержит высокостабильные часы 16, микроконтроллер 17, гидрофон 7, датчики физических параметров 18, датчики физиологических параметров 19, тревожный оповещатель 20.
Радиомодем 10 наземной станции 5 служит для обмена данными по радиоканалу с радиомодемами 13 буев 6. GPS-приемник 12 наземной станции 1 служит для синхронизации часов наземной станции 5 с целью организации синхронной работы обмена данными системы в целом.
GPS-приемник 15 буя 6 служит для синхронизации обмена данными в системе и для определения текущих географических координат буя 6. Гидрофон 8 буя 6 служит для обмена данными по гидроакустическому каналу с гидрофоном 7 пловца 1. Микроконтроллер 14 буя 6 служит для измерения времени запаздывания сигнала от пловца 1, для передачи этого времени и собственных координат буя на наземную станцию 5 посредством радиомодема 13, для передачи команд от наземной станции 5 к пловцу 1.
Высокостабильные часы 16 пловца 1 предварительно синхронизированы по GPS-часам наземной станции 5 и буев 6 и служат для синхронизации обмена данными по гидроакустическому каналу. Микроконтроллер 17 пловца 1 служит для обработки сигналов датчиков физических параметров 18 и датчиков физиологических параметров 19, передачи этих параметров на буи 6 в предустановленный момент времени посредством гидрофона 7, анализа этих параметров и формирования сигнала тревожного оповещения в случае выхода какого-либо параметра за заданные пределы путем включения тревожного оповещателя 20 и передачи тревожного извещения в предустановленные моменты времени гидрофоном 7.
Система работает следующим образом.
Буи 6 устанавливаются на поверхности моря, образуя измерительную базу. Подводные пловцы 1 в процессе подводного движения должны находиться в пределах измерительной базы.
Расчет координат производится на основе длинной измерительной базы, используя известный пространственный принцип вычисления расстояний, определенных гидроакустическим методом с измерением времени запаздывания гидроакустического сигнала, принимаемого гидрофоном 8 буев 6, относительно излучаемой гидрофоном 7 подводных пловцов 1 информационной посылки. При этом периодическое излучение гидрофона 7 производится в предустановленный момент времени, синхронный с ходом часов 16 и различный для каждого подводного пловца. Сигнал от определенного пловца принимается гидрофоном 8 буев 6, и с помощью микроконтроллера 14 измеряется время запаздывания этого сигнала до каждого буя. Далее каждый буй передает это время по радиоканалу на наземную станцию 5 с помощью радиомодема 13. Радиомодем 10 наземной станции 5 принимает эти данные, и по полученным от всех буев данных ЭВМ 11 вычисляет координаты определенного пловца и выводит их на дисплей в виде точек на карте моря и в виде цифровых данных. Одновременно на дисплей могут выводиться и другие желаемые параметры определенного пловца.
Информационная посылка пловца, излучаемая в порядке очереди, содержит данные о физических и физиологических параметрах пловца, снимаемых с датчиков физических параметров 18 и датчиков физиологических параметров 19 микроконтроллером 16.
Микроконтроллер 16 также сравнивает все снимаемые параметры с датчиков с предустановленными допустимыми пределами и в случае выхода какого-либо параметра за эти пределы формирует тревожное извещение и включает тревожный оповещатель 20 пловца 1. Тревожное извещение передается гидрофоном 7 в ближайшей паузе между информационными посылками один раз в цикл передач всех пловцов до тех пор, пока в любой из последующих пауз им не будет получена команда подтверждения от наземной станции.
Любая команда, передаваемая от наземной станции конкретному пловцу, ретранслируется из радиоканала в гидроакустический канал ближайшим к пловцу буем в ближайшей паузе между информационными посылками синхронно с временной меткой часов GPS. Таким образом, достигается синхронность в работе всей системы и устраняются возможные наложения гидроакустических сигналов, приводящие к потере информации.
В результате достигается заявленный технический результат.
Предложенное техническое решение обеспечивает повышенную точность и надежность контроля состояния параметров группы мобильных подводных пловцов.
Дополнительно достигается упрощение и уменьшение веса аппаратуры подводного пловца за счет использования только одной частоты в гидроакустическом диапазоне.
Источники информации
1. Милн П.Х. Гидроакустические системы позиционирования. Перевод с англ. В.К.Комлева. - Л.: Судостроение, 1989. - С.232.
2. Подводная навигационная панель «Кобра». www.RusArmy.com. - Боевые пловцы - их снаряжение и технические средства борьбы с ними.
3. Method and apparatus for carrying out high data rate and voice underwater communication. US Patent 6,130,859, Int. Cl. H04B 11/00, Oct. 10, 2000.
4. Кардиомониторы. Аппаратура непрерывного контроля ЭКГ: Учеб. пособие для вузов/ А.Л.Барановский, А.Н.Калиниченко, Л.А.Манило и др. Под ред. А.Л.Барановского и А.П.Немирко. - М.: Радио и связь, 1993. - С.248.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2010 |
|
RU2437114C1 |
| Интеллектуальная сетевая система мониторинга охраняемой территории нефтегазовой платформы в ледовых условиях | 2019 |
|
RU2715158C1 |
| СПОСОБ И СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ГРУППЫ ПОДВОДНЫХ ОБЪЕКТОВ В ОГРАНИЧЕННОМ ВОДНОМ ОБЪЕМЕ | 2016 |
|
RU2626244C1 |
| Радиоканальный комплекс кардиоконтроля и спасения в жизнеугрожающих ситуациях | 2018 |
|
RU2676443C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ И КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 2014 |
|
RU2561012C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2004 |
|
RU2303275C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОГРАФИЧЕСКИХ КООРДИНАТ ПОДВОДНОГО ОБЪЕКТА | 2019 |
|
RU2717578C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| ИНФОРМАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2266217C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599902C1 |
Изобретение относится к области водолазного оборудования и может быть применено для контроля состояния мобильных подводных пловцов с целью обеспечения безопасности жизнедеятельности в ходе подводных работ, спортивного плавания, лечебной физкультуры и т.д. В состав системы входят наземная станция с ЭВМ, световым и звуковым тревожными оповещателями. На подлежащем контролю как минимум одном подводном пловце установлены гидрофон и кнопка передачи тревожного извещения. Имеются буи в количестве не менее трех, расположенные на поверхности моря. Буи снабжены GPS-приемником, гидрофоном, микроконтроллером и радиомодемом. Наземная станция дополнительно содержит радиомодем и GPS-приемник. Подводный пловец дополнительно снабжен высокостабильными часами, предварительно синхронизированными по часам GPS, датчиками физических и физиологических параметров и микроконтроллером для обработки сигналов датчиков и автоматического формирования тревожного извещения. За счет непрерывного контроля физических и физиологических параметров пловцов с автоматическим формированием сигнала тревоги при выходе этих параметров за заданные пределы, а также определения точных географических координат пловцов повышаются надежность и функциональность системы и обеспечивается безопасность нахождения человека под водой. 2 з.п. ф-лы, 3 ил.
1. Система контроля состояния подводных пловцов, состоящая из наземной станции, содержащей ЭВМ с программой вычисления координат и отображения состояния пловцов на экране, световой и звуковой тревожные оповещатели, а также гидрофона и кнопки передачи тревожного извещения, установленных на подлежащем контролю, как минимум, одном подводном пловце, отличающаяся тем, что система дополнительно содержит буи в количестве не менее трех, расположенные на поверхности моря, причем буи снабжены GPS-приемником, гидрофоном, микроконтроллером и радиомодемом, наземная станция дополнительно содержит радиомодем и GPS-приемник, подводный пловец дополнительно снабжен высокостабильными часами, предварительно синхронизированными по часам GPS, датчиками физических и физиологических параметров и микроконтроллером для обработки сигналов датчиков и автоматического формирования тревожного извещения.
2. Система по п.1, отличающаяся тем, что в качестве контролируемых физических параметров выступают координаты пловца, глубина погружения, температура и скорость течения воды.
3. Система по п.1, отличающаяся тем, что в качестве контролируемых физиологических параметров выступают параметры состояния сердечнососудистой системы пловца и уровень азота в крови.
| US 6108272 В2, 22.08.2000 | |||
| СПОСОБ АВТОМАТИЧЕСКОГО СИММЕТРИРОВАНИЯ ТОКОВ МНОГОФАЗНОЙ СИСТЕМЫ ПО ОДНОЙ ИЗ ФАЗ ПРИ КОМБИНИРОВАННОМ ОТБОРЕ МОЩНОСТИ | 2008 |
|
RU2390903C9 |
| US 2002140599 А1, 03.10.2002 | |||
| JP 4151394 А, 25.05.1992 | |||
| СНАРЯЖЕНИЕ ДЛЯ ОПРЕДЕЛЕНИЯ ИНДИВИДУАЛЬНОЙ МАССЫ БАЛЛАСТА НУЛЕВОЙ ПЛАВУЧЕСТИ | 2004 |
|
RU2281221C2 |

