Данный способ относится к области метрологии в геодезической отрасли.
Известен способ непосредственного измерения эталонного расстояния при помощи системы лазерной измерительной, который выполняется в лабораторных условиях [Ingensand, H. Performances and experiences in terrestrial laser scanning [Текст]. / H.Ingensand, A.Ryf, T.Schulz // Procs. 6th Conference on Optical 3-D Measurement Techniques, PP.236-243, Zurich, Switzerland, September 22-25, 2003.
Данный способ состоит в том, что устанавливают наземный лазерный сканер (НЛС) на один из концов системы лазерной измерительной, на другой конец устанавливают марку, на которую выполняют однократные измерения, причем марку и сканер перед началом измерения центрируют и горизонтируют, после этого, сравнивая измеренное расстояние с эталонным значением (полученное интерферометром), делают заключение о погрешности измерения расстояний наземным лазерным сканером
Недостатком этого способа является то что, данный способ предполагает использование центрировочных и горизонтрующих устройств, которыми снабжена малая часть НЛС. Но поскольку большинство моделей сканеров не имеют устройств для центрирования и горизонтирования прибора, то невозможно точно определить начало системы координат сканера относительно точки, являющейся одним из концов базисного отрезка. Поэтому невозможно определить достоверную и точную погрешность измерения расстояния НЛС.
Также известен способ определения погрешности измерения расстояния лазерным сканером на эталонном пространственном базисе [Iavaronea, A. Calibration verification facilities for long range laser scanners [Текст]. / А.Iavaronea, E.Martina // Procs. 6th Conference on Optical 3-D Measurement Techniques, PP.268-278, Zurich, Switzerland, September 22-25, 2003.], взятый в качестве прототипа.
Сущность данного способа состоит в том, что устанавливают НЛС на один из концов базиса, на другой конец устанавливают марку, на которую выполняют однократные измерения, причем марку и сканер перед началом измерения центрируют и горизонтируют, после этого сравнивая измеренное расстояние с эталонным делают заключение о погрешности измерения расстояний НЛС.
Недостатком этого способа является то что, данный способ предполагает использование центрировочных и горизонтрующих устройств, которыми снабжена малая часть НЛС. Но поскольку большинство моделей сканеров не имеют устройств для центрирования и горизонтирования прибора, то невозможно точно определить начало системы координат сканера относительно точки, являющейся одним из концов базисного отрезка. Поэтому невозможно определить достоверную и точную погрешность измерения расстояния НЛС.
Задачей предлагаемого изобретения является повышение достоверности и точности определения погрешности измерения расстояния наземным лазерным сканером.
Поставленная задача достигается тем, что в предлагаемом способе определения погрешности измерения расстояний наземным лазерным сканером берут эталонный отрезок, концы которого закреплены пунктами. Согласно изобретению сканер устанавливают в створе линии, соединяющей центры двух пунктов, примерно в ее середине, вертикальную ось его приводят в отвесное положение с погрешностью не грубее 5°, а на закрепленные пункты устанавливают пластины, которые центрируют над пунктами и вертикальные оси приводят в отвесное положение, выполняют множественные измерения (более 1000) на обе пластины в соответствии с эксплуатационными документами получают 2 скана, по ним определяют центры пластин как пересечение диагоналей и вычисляют пространственные координаты центров пластин, по которым определяют расстояние между пластинами по формуле
 ,
,
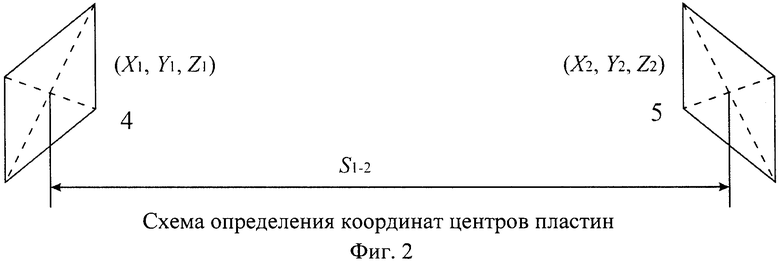
где Х1, Y1, Z1 и X2, Y2, Z2 - координаты центров соответственно первой и второй пластин.
полученные расстояния сравнивают с эталонными значениями Sэтл, вычисляют погрешность mизм по формуле
mизм=Sэтл-S1-2
сравнивают полученные значения погрешности mизм с допуском, вычисляемым по формуле
 ,
,
где mS=(a+b×10-6S1-2) - средняя квадратическая погрешность измерений расстояний, указанная в ЭД на конкретный вид наземного лазерного сканера («а» постоянная (приборная) и «b» закономерная погрешность измерения расстояний, указанная в ЭД на конкретный вид наземного лазерного оборудования).
Способ поясняется чертежами.
На Фиг.1 представлена схема установки сканера при определении погрешности измерения расстояний,
на Фиг.2 представлена схема определения координат центров пластин,
где 1 - наземный лазерный сканер; 2 и 3 - пункты эталонного пространственного базиса; 4 и 5 - пластины.
Сущность способа заключается в том, что сканер 1, устанавливают примерно посередине между двумя концами эталонного базиса 2 и 3. При этом вертикальную ось наземного лазерного сканера 1 приводят примерно в отвесное положение с погрешностью не грубее 5°. Марки (пластины) 4 и 5 центрируют над пунктами 2 и 3, а их вертикальную ось приводят в отвесное положение. Производят измерения на пластины 4, 5 в соответствии с требованиями ЭД, угловое разрешение сканирования по вертикали и горизонтали должно быть максимальным в соответствии с тактико-техническими характеристиками сканера. При этом количество измерений более 1000. Затем определяют координаты центров пластины 4 (Х2, Y2, Z2) и пластины 5 (X1, Y1, Z1). На основе этих координат вычисляют измеренное расстояние, которое в последующем сравнивают с эталонным значением.
Выполняют измерения температуры и давления окружающей среды, которые заносят в специализированное программное обеспечение для управления НЛС.
Выполняют обработку результатов измерений и вычисляют координаты центров пластин 4 и 5.
Примечание - результатом сканирования является скан, т.е. изображение, на котором отсканированная пластина имеет размеры. По сканерному изображению размеры пластины можно определить с погрешностью 0.005 м в поперечном направлении измеряемого базиса. Центры пластин определяют как пересечение диагоналей сканерного изображения пластины. Обработку результатов измерений НЛС выполняют при помощи лицензированного программного продукта.
В результате измерений оценивают расстояние S1-2, которое определяют по формуле

где S1 и S2 - расстояние от наземного лазерного сканера до центра пластин 4 и 5 соответственно.
Вычисляют измеренное расстояние между пунктами базиса 2 и 3 S1-2 по формуле

где Х1, Y1, Z1 и X2, Y2, Z2 - координаты центров соответственно первой и второй пластин.
Наземный лазерный сканер признают пригодным к эксплуатации, если разности между измеренным расстоянием и эталонным значениями интервалов базиса не превышают допустимого значения абсолютной погрешности  , вычисленной по формуле
, вычисленной по формуле

где mS=(a+b×10-6S1-2) - средняя квадратическая погрешность измерений расстояний, указанная в ЭД на конкретный вид наземного лазерного сканера («a» постоянная (приборная) и «b» закономерная погрешность измерения расстояний, указанная в ЭД на конкретный вид наземного лазерного оборудования).
В настоящее время для поверки наземных лазерных сканеров их необходимо либо отправлять заграницу, либо проводить поверку не в полном объеме. Предлагаемый способ позволит проводить полномасштабную поверку наземных лазерных сканеров в Российской Федерации, что сократит затраты связанные с этими процедурами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УГЛОВ НАЗЕМНЫМ ЛАЗЕРНЫМ СКАНЕРОМ | 2010 |
|
RU2429449C1 |
| СПОСОБ ГРАДУИРОВКИ РЕЗЕРВУАРА ШАРОВОГО (СФЕРИЧЕСКОГО) ДЛЯ ОПРЕДЕЛЕНИЯ ВМЕСТИМОСТИ, СООТВЕТСТВУЮЩЕЙ ВЫСОТЕ ЕГО НАПОЛНЕНИЯ | 2011 |
|
RU2470266C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОНТРОЛЬНОЙ ТОЧКИ ОБЪЕКТА С ПРИМЕНЕНИЕМ НАЗЕМНОГО ЛАЗЕРНОГО СКАНЕРА | 2013 |
|
RU2540939C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ВОССТАНОВЛЕНИЯ ПОЛОЖЕНИЯ ГОРИЗОНТАЛЬНОЙ ОСИ ЛИНЕЙНОГО ИНЖЕНЕРНОГО ОБЪЕКТА | 2015 |
|
RU2591585C1 |
| СПОСОБ ГРАДУИРОВКИ РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО ДЛЯ ОПРЕДЕЛЕНИЯ ВМЕСТИМОСТИ, СООТВЕТСТВУЮЩЕЙ ВЫСОТЕ ЕГО НАПОЛНЕНИЯ | 2013 |
|
RU2521212C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ КРЕНА РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО | 2014 |
|
RU2597958C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИН ДЕФОРМАЦИЙ СТЕНКИ РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО | 2015 |
|
RU2581722C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ПОВЕРХНОСТИ ПОКРЫТИЯ АВТОМОБИЛЬНОЙ ДОРОГИ ПО ЕЕ ГЕОМЕТРИЧЕСКИМ ПАРАМЕТРАМ | 2013 |
|
RU2526793C1 |
| Способ автоматизированных измерений и дистанционной передачи данных для геотехнического мониторинга объектов добычи газа | 2024 |
|
RU2836421C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРОВНОСТИ ПОВЕРХНОСТИ ДОРОЖНОГО ПОЛОТНА | 2012 |
|
RU2509978C1 |
Берут эталонный отрезок, концы которого закреплены пунктами. Сканер устанавливают в створе линии, соединяющей центры двух пунктов, примерно в ее середине. Вертикальную ось сканера приводят в отвесное положение с погрешностью не грубее 5°. На закрепленные пункты устанавливают пластины, которые центрируют над пунктами и вертикальные оси приводят в отвесное положение. Выполняют множественные измерения (более 1000) на обе пластины в соответствии с эксплуатационными документами и получают 2 скана. По сканам определяют центры пластин как пересечение диагоналей и вычисляют пространственные координаты центров пластин. По ним определяют расстояние между пластинами S1-2. Полученные расстояния сравнивают с эталонными значениями Sэтл. Погрешность mизм вычисляют по формуле mизм=Sэтл-S1-2 и сравнивают полученные значения погрешности mизм с допуском. Допуск вычисляется по формуле  где mS=(a+b×10-6 S1-2) - средняя квадратическая погрешность измерений расстояний, указанная в ЭД на конкретный вид наземного лазерного сканера («а» постоянная (приборная) и «b» закономерная погрешность измерения расстояний, указанная в ЭД на конкретный вид наземного лазерного оборудования). Технический результат - повышение достоверности и точности определения погрешности измерения расстояния наземным лазерным сканером. 2 ил.
где mS=(a+b×10-6 S1-2) - средняя квадратическая погрешность измерений расстояний, указанная в ЭД на конкретный вид наземного лазерного сканера («а» постоянная (приборная) и «b» закономерная погрешность измерения расстояний, указанная в ЭД на конкретный вид наземного лазерного оборудования). Технический результат - повышение достоверности и точности определения погрешности измерения расстояния наземным лазерным сканером. 2 ил.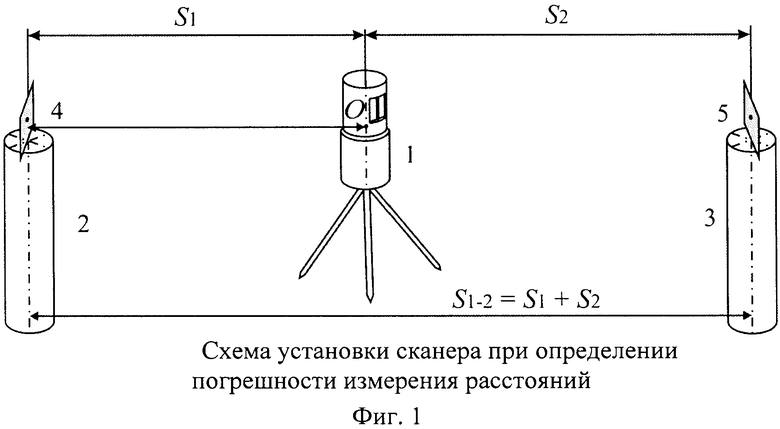
Способ определения погрешности измерения расстояний наземным лазерным сканером, при котором берут эталонный отрезок, концы которого закреплены пунктами, отличающийся тем, что сканер устанавливают в створе линии, соединяющей центры двух пунктов, примерно в ее середине, вертикальную ось его приводят в отвесное положение с погрешностью не грубее 5°, а на закрепленные пункты устанавливают пластины, которые центрируют над пунктами, и вертикальные оси приводят в отвесное положение, выполняют множественные измерения (более 1000) на обе пластины в соответствии с эксплуатационными документами, получают 2 скана, по ним определяют центры пластин как пересечение диагоналей и вычисляют пространственные координаты центров пластин, по которым определяют расстояние между пластинами по формуле:
 ,
,
где X1, Y1, Z1 и Х2, Y2, Z2 - координаты центров соответственно первой и второй пластин,
полученные расстояния сравнивают с эталонными значениями Sэтл, вычисляют погрешность mизм по формуле:
mизм=Sэтл-S1-2,
сравнивают полученные значения погрешности mизм с допуском, вычисляемым по формуле:
 ,
,
где ms=(a+b·10-6S1-2) - средняя квадратическая погрешность измерений расстояний, указанная в ЭД на конкретный вид наземного лазерного сканера («а» постоянная (приборная) и «b» закономерная погрешность измерения расстояний, указанная в ЭД на конкретный вид наземного лазерного оборудования).
| Методика калибровки цифровых неметрических камер для наземных лазерных сканеров, 2006 | |||
| Способ определения осредненной погрешности прозрачного лимба углоизмерительного прибора | 1988 |
|
SU1659702A1 |
| US 2003015654 A1, 23.01.2003 | |||
| 1972 |
|
SU417742A1 | |

