Данный способ относится к области метрологии в геодезической отрасли.
Известен способ определения погрешности измерения углов электронными тахеометрами и теодолитами, который основан на использовании автоколлиматора, взятый в качестве прототипа [Геодезия. Геодезические и фотограмметрические приборы [Текст]: Справ. Пособие. / Н.Н.Воронков, B.C.Плотников, Е.И.Калантаров и др. - М.: Недра, 1991. - 429 с.: ил.].
В этом способе выполняется наблюдение эффекта автоколлимации через специальные устройства, угол между которыми известен с высокой точностью и является эталонным значением. После измерений выполняют сравнение углов, измеренных исследуемым прибором с эталонным значением, на основе чего делают заключение о погрешности измерения углов теодолитом или электронным тахеометром.
Недостатком этого способа для применения для наземных лазерных сканеров является то что, в нем используется эффект автоколлимации. Этот эффект предполагает наблюдение в зрительную трубу прибора четкого изображения. В наземных лазерных сканерах нет возможности наблюдать эффект автоколимации, так как в нем измерение углов выполняется автоматически (отсутствует зрительная труба). Это требует разработки совершенно нового способа определения погрешностей измерения углов наземным лазерным сканером.
Задачей предлагаемого изобретения является разработка способа определения достоверных и точных погрешностей измерения углов, приспособленного для наземных лазерных сканеров.
Технический результат, получаемый при решении поставленной задачи, достигается тем, что в способе определения погрешности измерения углов наземным лазерным сканером используют эталонные значения углов и полигона и согласно изобретению испытательный радиальный полигон создают специальными марками, установленными по окружности через одинаковый угол в количестве не менее 20 штук, при этом радиус окружности должен быть от 10 до 40 м (для каждой модели наземного лазерного сканера специальные марки имеют индивидуальный вид, рекомендуемый заводом-изготовителем), устанавливают электронный тахеометр в центр радиального полигона, измеряют эталонные значения углов между направлениями на марки, затем вместо электронного тахеометра устанавливают сканер, для определения погрешности измерения горизонтальных углов ось вращения сканера приводят приблизительно в отвесное положение, а для определения погрешности измерения вертикальных углов - в горизонтальное положение, с погрешностью не грубее 5°, выполняют множественные измерения (более 200) на каждую марку в соответствии с эксплуатационными документами (ЭД), получают несколько сканов, количество которых равняется числу марок, установленных на полигоне, по множественным измерениям определяют координаты центров марок при помощи управляющего программного обеспечения, поставляемого заводом-изготовителем, производят внешнее ориентирование сканов в систему координат, заданную электронным тахеометром, в результате чего в программном продукте определяют отклонения измеренных углов от их эталонных значений, вычисляют среднюю квадратическую погрешность измерения углов mизм для горизонтальных и вертикальных углов и сравнивают полученное значение погрешности mизм с допуском, вычисляемым по формуле
где mφ(θ) - средняя квадратическая погрешность измерений горизонтальных (вертикальных) углов, указанная в ЭД на конкретный вид наземного лазерного сканера.
На чертеже представлена схема размещения марок и наземного лазерного сканера, где:
1 - марка,
2 - центр радиального полигона.
Предлагаемый способ осуществляется следующим образом.
Устанавливают марки по окружности в количестве 20 штук. Радиус окружности выбирается в зависимости от модели наземного лазерного сканера (от 10 до 40 м).
Устанавливают в центр созданного полигона высокоточный электронный тахеометр и определяют эталонные значения углов, при этом количество полуприемов должно быть не менее 3-х.
Устанавливают наземный лазерный сканер в соответствии с чертежом, при этом для определения погрешности измерения горизонтальных углов ось вращения сканера приводят приблизительно в отвесное положение, а для определения погрешности измерения вертикальных углов - в горизонтальное положение, с погрешностью не грубее 5°, и выполняют измерения на каждую марку с максимальным разрешением в соответствии с ЭД.
Выполняют внешнее ориентирование наземного лазерного сканера собственной программой обработки данных, принадлежащих данному оборудованию.
Определяют измеренные углы между центрами марок и сравнивают с эталонными значениями. Оборудование признается годным к эксплуатации, если разности между измеренными и эталонными значениями абсолютной погрешности  горизонтальных (вертикальных) углов соответственно, вычисленной по формуле
горизонтальных (вертикальных) углов соответственно, вычисленной по формуле
где mφ(θ) - средняя квадратическая погрешность измерения горизонтальных (вертикальных) углов, указанная в ЭД на конкретный вид оборудования.
В настоящее время для метрологической аттестации наземных лазерных сканеров их необходимо либо отправлять за границу, либо проводить поверку не в полном объеме. Предлагаемый способ позволит проводить полномасштабную поверку наземных лазерных сканеров в Российской Федерации, что сократит затраты, связанные с этими процедурами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ РАССТОЯНИЙ НАЗЕМНЫМ ЛАЗЕРНЫМ СКАНЕРОМ | 2010 |
|
RU2429450C1 |
| СПОСОБ ГРАДУИРОВКИ РЕЗЕРВУАРА ШАРОВОГО (СФЕРИЧЕСКОГО) ДЛЯ ОПРЕДЕЛЕНИЯ ВМЕСТИМОСТИ, СООТВЕТСТВУЮЩЕЙ ВЫСОТЕ ЕГО НАПОЛНЕНИЯ | 2011 |
|
RU2470266C2 |
| СПОСОБ ГРАДУИРОВКИ РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО ДЛЯ ОПРЕДЕЛЕНИЯ ВМЕСТИМОСТИ, СООТВЕТСТВУЮЩЕЙ ВЫСОТЕ ЕГО НАПОЛНЕНИЯ | 2013 |
|
RU2521212C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОНТРОЛЬНОЙ ТОЧКИ ОБЪЕКТА С ПРИМЕНЕНИЕМ НАЗЕМНОГО ЛАЗЕРНОГО СКАНЕРА | 2013 |
|
RU2540939C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ КРЕНА РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО | 2014 |
|
RU2597958C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИН ДЕФОРМАЦИЙ СТЕНКИ РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО | 2015 |
|
RU2581722C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ВОССТАНОВЛЕНИЯ ПОЛОЖЕНИЯ ГОРИЗОНТАЛЬНОЙ ОСИ ЛИНЕЙНОГО ИНЖЕНЕРНОГО ОБЪЕКТА | 2015 |
|
RU2591585C1 |
| Способ калибровки мобильных 3D-координатных средств измерений и устройство для его реализации | 2018 |
|
RU2710900C1 |
| ПОВЕРОЧНЫЙ КОМПЛЕКС КООРДИНАТНЫХ ПРИБОРОВ И ИЗМЕРИТЕЛЬНЫХ СИСТЕМ | 2012 |
|
RU2494346C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ПОВЕРХНОСТИ ПОКРЫТИЯ АВТОМОБИЛЬНОЙ ДОРОГИ ПО ЕЕ ГЕОМЕТРИЧЕСКИМ ПАРАМЕТРАМ | 2013 |
|
RU2526793C1 |
Изобретение относится к области метрологии в геодезической отрасли. Техническим результатом изобретения является определение достоверных и точных погрешностей измерения углов для наземных лазерных сканеров. Способ определения погрешности измерения углов наземным лазерным сканером заключается в использовании эталонных значений углов и полигона. Испытательный радиальный полигон создают специальными марками, установленными по окружности через одинаковый угол в количестве не менее 20 штук. Радиус окружности должен быть от 10 до 40 м. Устанавливают высокоточный электронный тахеометр в центр радиального полигона. Измеряют эталонные значения углов между направлениями на марки. Затем вместо электронного тахеометра устанавливают сканер. Выполняют множественные измерения (более 200) на каждую марку в соответствии с эксплуатационными документами (ЭД). По множественным измерениям определяют координаты центров марок при помощи управляющего программного обеспечения. Производят внешнее ориентирование сканов в систему координат, заданную электронным тахеометром. В программном продукте определяют отклонения измеренных углов от их эталонных значений. Вычисляют среднюю квадратическую погрешность измерения углов mизм. Сравнивают полученные значения погрешности mизм с допуском, вычисляемым по формуле
где mφ - средняя квадратическая погрешность измерений углов, указанная в ЭД на конкретный вид наземного лазерного сканера. 1 ил.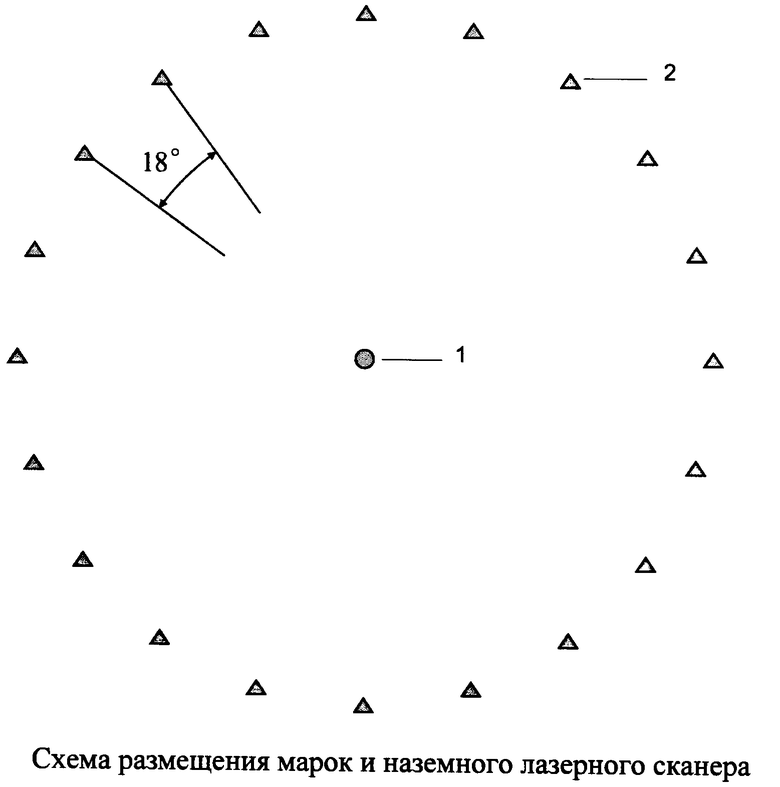
Способ определения погрешности измерения углов наземным лазерным сканером, при котором используют эталонные значения углов и полигон, отличающийся тем, что испытательный радиальный полигон создают специальными марками, установленными по окружности через одинаковый угол в количестве не менее 20 штук, при этом радиус окружности должен быть от 10 до 40 м (для каждой модели наземного лазерного сканера специальные марки имеют индивидуальный вид, рекомендуемый заводом-изготовителем), устанавливают высокоточный электронный тахеометр в центр радиального полигона, измеряют эталонные значения углов между направлениями на марки, затем вместо электронного тахеометра устанавливают сканер, причем для определения погрешности измерения горизонтальных углов ось вращения сканера приводят приблизительно в отвесное положение, а для определения погрешности измерения вертикальных углов - в горизонтальное положение с погрешностью не грубее 5°, выполняют множественные измерения (более 200) на каждую марку в соответствии с эксплуатационными документами (ЭД), получают несколько сканов, количество которых равняется числу марок, установленных на полигоне, по множественным измерениям определяют координаты центров марок при помощи управляющего программного обеспечения, поставляемого заводом-изготовителем, производят внешнее ориентирование сканов в систему координат, заданную электронным тахеометром, в результате чего в программном продукте определяют отклонения измеренных углов от их эталонных значений, вычисляют среднюю квадратическую погрешность измерения углов mизм, сравнивают полученные значения погрешности mизм с допуском, вычисляемым по формуле:
где mφ - средняя квадратическая погрешность измерений углов, указанная в ЭД на конкретный вид наземного лазерного сканера.
| Способ построения пространственной геодезической сети в виде цепочки треугольников и угломерный прибор для его осуществления | 1986 |
|
SU1613858A1 |
| Устройство для измерения угла наклона | 1981 |
|
SU972212A1 |
| ОТРАЖАТЕЛЬНЫЙ УГЛОМЕРНЫЙ ИНСТРУМЕНТ | 2001 |
|
RU2190188C1 |
| ТЕОДОЛИТ | 1994 |
|
RU2079104C1 |
| ИЗМЕРИТЕЛЬ УГЛОВ (ВАРИАНТЫ) | 1994 |
|
RU2116618C1 |
| 1972 |
|
SU414559A1 |

