Изобретение относится к области радиотехники и может быть использовано в одно- и многопозиционных системах воздушного радиомониторинга для повышения эффективности отождествления пеленгов с наземными источниками радиоизлучения (ИРИ).
Повышение вероятности правильного отождествления пеленгов к одному и тому же ИРИ и точности определения координат ИРИ обеспечивается за счет определения с заданной вероятностью координат положения, параметров ориентации и величин полуосей текущей доверительной области (ДО) эллиптической формы, принадлежности текущего измеренного пеленга к данному ИРИ и определению результирующих координат ИРИ в масштабе времени, близком к реальному.
Известный способ пространственного отождествления пеленгов с наземными источниками радиоизлучения по координатной информации рассматривается в [Мельников Ю.П., Попов С.В. Радиотехническая разведка. – М.:Радиотехника, 2008] включающий:
1. Пеленгование наземного неподвижного ИРИ из точек 



2. Нахождение опорных пеленгов, исходя из условия 

3. Нахождение координат 
4. Построение доверительной области (ДО). Радиус 
где 

5. Определение по известным координатам точки измерения пеленга, вычисленному Rдоi и оценочным значениям координат ИРИ углового размера ДО (сектора) по формуле

где 

6. Проверка условия попадания пеленга на ИРИ из текущей точки пеленгования в пределы сектора 


7. Отождествление пеленга, удовлетворяющего указанному условию, с ИРИ.
Наиболее близким к предлагаемому является способ пространственного отождествления пеленгов с наземными источниками радиоизлучения [Михеев В.А., Васильев А.В., Тетеруков А.Г., Кашевский П.А., Тупчиенко И.Н. Адаптивный способ пространственного отождествления пеленгов с наземными источниками радиоизлучения и система для его реализации, Патент РФ №2686481, G01S 5/04], принятый за прототип.
Способ-прототип включает выполнение следующих действий.
1. Пеленгование наземного неподвижного ИРИ из точек xi для определения пеленгов по азимуту αi, где
2. Определение опорных пеленгов исходя из условия: 
где
3. Нахождение опорных координат ИРИ как точки их пересечения по формулам
где L12 – расстояние между 1-й и 2-й опорными точками нахождения ЛА в момент пеленгования, α1оп и α2оп - опорные пеленги на ИРИ из 1-й и 2-й опорных точек измерения соответственно.
4. Определение центра и радиуса ДО, а также вычисления оценочных значений дальностей до ИРИ из текущих точек пеленгования по формуле:
где 

При значении Рдов мп=0,9, выражение для расчета Rдоi будет иметь вид:
где Di – дальность до ИРИ из текущей (i-й) точки пеленгования,
5. Отождествление ранее поступивших и очередных (вновь полученных) пеленгов с ИРИ, включающий следующие операции:
- вычисление по известным координатам точки измерения пеленга, оценочным (опорным) значениям МП ИРИ и 
- определение по известным координатам точки измерения пеленга, вычисленному Rдоi и оценочным значениям координат ИРИ углового размера ДО (сектора) 


- проверку условия попадания пеленга на ИРИ из текущей точки пеленгования в пределы сектора
- отождествление пеленга, удовлетворяющего указанному условию, с ИРИ.
Недостатки способа-прототипа заключаются в следующем:
1. Используемая в прототипе доверительная область представляется в виде окружности с радиусом, вычисляемым по формуле (3), исходя из требуемой доверительной вероятности Рдов, ошибки измерения пеленгов и дальности до ИРИ из точки пеленгования. Однако результат определения координат ИРИ из опорных точек содержит ошибку, вследствие которой положение центра используемой в прототипе ДО носит случайных характер. В общем случае ДО имеет форму эллипса, параметры ориентации и величины полуосей которого зависят как от требуемой доверительной вероятности Рдов и среднеквадратических ошибок пеленгования, так и от взаимного расположения опорных точек пеленгования и ИРИ. Представление ДО в форме окружности является приближением, степень адекватности которого в зависимости от точности пеленгования и параметров взаимного расположения точек пеленгования и ИРИ может быть различным. Это приводит к ошибке в определении углового размера ДО (сектора), при попадании в пределы которого пеленга из текущей точки пеленгования принимается решение о принадлежности текущего измеренного пеленга к данному ИРИ. Возможны также ситуации, когда при использовании способа-прототипа круговой доверительной области луч пеленга ее не пересекает, т.е. пеленг не будет отождествлен с ИРИ, однако при использовании более корректной эллиптической ДО пересечение обеспечивается и отождествление произойдет. Указанные недостатки прототипа определяют снижение вероятности правильного определения принадлежности текущего измеренного пеленга к данному ИРИ, и в целом, приводят к снижению точности и достоверности определения координат ИРИ.
2. Среднеквадратические ошибки измерения пеленгов из различных точек (и, следовательно, в различные моменты времени) считаются одинаковыми. Как справедливо отмечено в прототипе, объективная необходимость использования координатной информации для отождествления пеленгов с ИРИ обусловлена свойством ее инвариантности к изменению радиотехнических параметров (в частности, частотно-временных параметров радиосигнала). В общем случае, при изменении частоты спектральных компонент излучения радиосигнала (например, при пеленговании ИРИ, работающего в режиме перестройки рабочей частоты) следует учитывать частотную зависимость точности пеленгования, обусловленную изменением характеристик направленности антенной системы обнаружителя-пеленгатора в рабочем диапазоне частот. Так как частота радиосигнала, принимаемого в различных точках траектории полета ЛА, в общем случае может быть различной для одного и того же ИРИ, то использование одинакового значения среднеквадратической ошибки пеленгования в различных точках пеленгования может приводить к снижению достоверности определения параметров зоны ДО и вероятности правильного определения принадлежности текущего измеренного пеленга к данному ИРИ и, как следствие, к снижению точности и достоверности определения координат ИРИ.
Задачей, на решение которой направлено предлагаемое техническое решение, является повышение эффективности отождествления пеленгов с наземными источниками радиоизлучения в системах воздушного радиомониторинга.
Для решения поставленной задачи в способе пространственного отождествления пеленгов с наземными источниками радиоизлучения (ИРИ), заключающемся в пеленговании наземного неподвижного ИРИ из i-й точек для определения пеленгов по азимуту αi, где 



где число k определяет размеры эллипсоида в соответствии с равенством:










определяют координаты (



где 






проверяют условие попадания пеленга в i-ой точке пеленгования на ИРИ в пределы сектора

где 

Предлагаемый способ пространственного отождествления пеленгов с наземными источниками радиоизлучения осуществляется следующим образом.
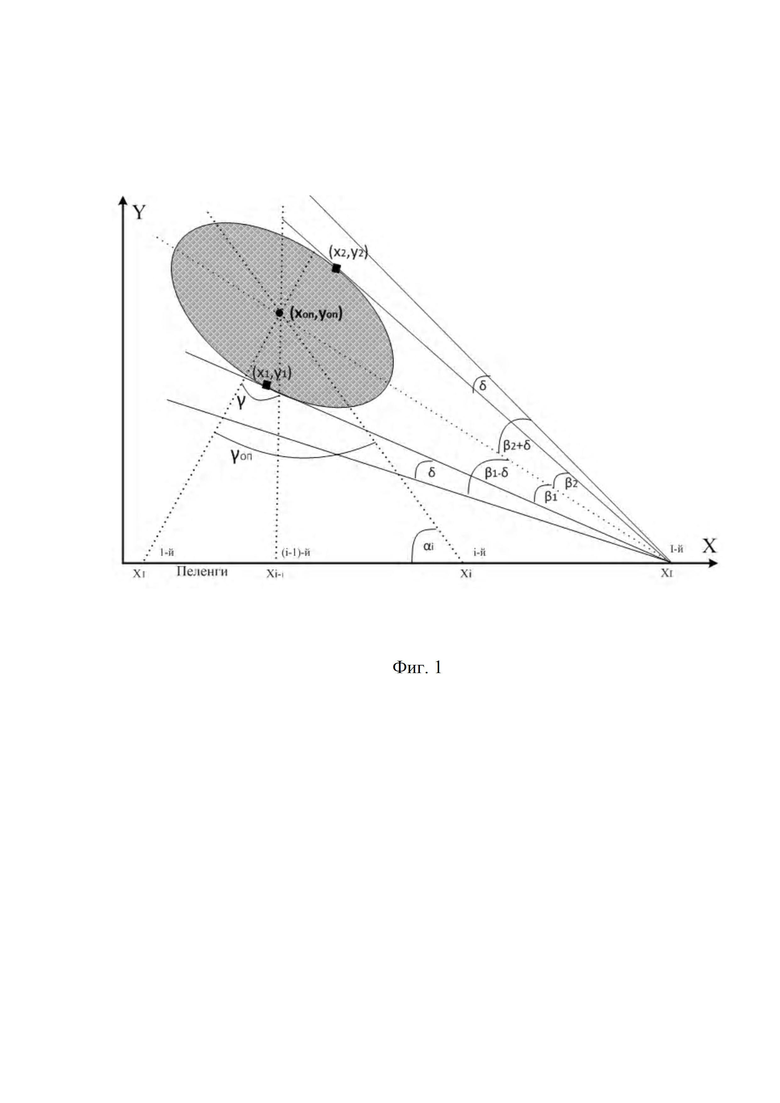
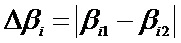
Летательный аппарат, оснащенный средством радиомониторинга (СРМ), осуществляет прямолинейный полет по заданному маршруту (фиг. 1). В процессе полета бортовая СРМ последовательно осуществляет пеленгование наземного неподвижного ИРИ из точек xi для определения пеленгов по азимуту αi, где
После измерения первого пеленга производится запоминание его значения и координат точки пеленгования (координат xi, yi ЛА в момент измерения первого пеленга). При поступлении второго пеленга его значение и координаты соответствующей ему точки пеленгования также запоминаются. Затем выполняется вычисление угла пересечения первого и второго пеленгов 
Если параметры первого и второго пеленгов не соответствуют данному условию, то этой же процедуре подвергаются очередные (вновь полученные) пеленги до тех пор, пока угол пересечения текущего пеленга с первым не попадет в указанный диапазон.
После попадания угла γ в указанный диапазон углов пересечения, оба пеленга считаются опорными, и производится оценка опорных координат ИРИ как точки их пересечения. Оценочные координаты местоположения ИРИ будем считать центром эллипса ошибок координат местоположения ИРИ. Ориентация и характеристики полуосей определяются матрицей 
Далее по известным координатам точки измерения пеленга, оценочным значениям координат ИРИ и координатам точек касания лучей опорных пеленгов границ эллипса ДО определяется угловой размер доверительной области (сектор) 

Применение предлагаемого способа в специальном программном обеспечении систем радиомониторинга позволяет повысить показатели эффективности отождествления пеленгов с наземными ИРИ.
Предлагаемый способ пространственного отождествления пеленгов с наземными источниками радиоизлучения предполагает выполнение следующих процедур.
1. Пеленгование наземного неподвижного ИРИ из точек xi для определения пеленгов по азимуту αi, где
2. Определение опорных пеленгов 
где 
3. Нахождение опорных координат ИРИ как точки пересечения опорных пеленгов по формулам
где L12 – расстояние между 1-й и 2-й опорными точками нахождения ЛА в момент пеленгования, α1оп и α2оп – опорные пеленги на ИРИ из 1-й и 2-й опорных точек измерения соответственно.
4. Определение эллипса ошибок координат местоположения ИРИ с центром в точке (
Вероятность попадания истинных координат ИРИ
где число k определяет размеры эллипсоида в соответствии с равенством:


4. Определение координат (
где



4. Определение (по известным координатам i-ой точки пеленгования, опорным координатам ИРИ и координатам точек касания с эллипсом лучей из текущей i-ой точки пеленгования) углового размера ДО (сектора)
5. Проверку условия попадания пеленга в i-ой точке пеленгования на ИРИ в пределы сектора
где
из i-ой текущей точки с отождествлением пеленга с ИРИ в случае выполнения условия и формированием списка отождествленных с ИРИ пеленгов и соответствующих им координат точек пеленгования 
Предлагаемый способ пространственного отождествления пеленгов с наземными источниками радиоизлучения лишен перечисленных выше недостатков прототипа, а именно:
1. В предлагаемом способе обеспечивается учет как ошибок пеленгования ИРИ, так и ошибок при определении координат ИРИ триангуляционным способом за счет использования при отождествлении эллиптической ДО, параметры ориентации и величины полуосей которой зависят как от требуемой доверительной вероятности Рдов и среднеквадратических ошибок пеленгования, так и от взаимного расположения опорных точек пеленгования и ИРИ.
2. Решение об отождествлении пеленга с наземным ИРИ осуществляется в случае попадания пеленга в i-ой точке пеленгования в пределы углового сектора 
3. Предлагаемый способ работоспособен, если среднеквадратические ошибки измерения пеленгов из различных точек
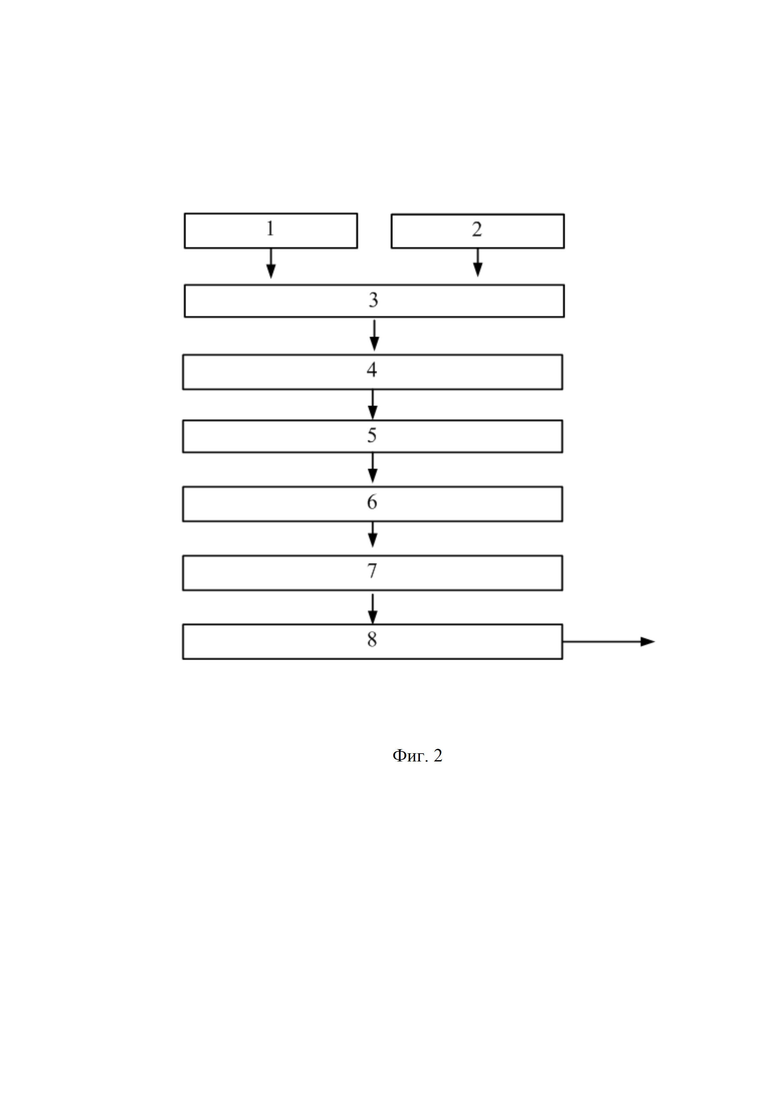
Блок-схема устройства (обнаружителя-пеленгатора) для реализации предлагаемого способа представлена на фиг. 2, где обозначено:
Блок-схема устройства (обнаружителя-пеленгатора) для реализации предлагаемого способа представлена на фиг. 2, где обозначено:
1 – бортовой пеленгатор (БП) для измерения пеленгов по азимуту
2 – навигационная система (НС) для определения
3, 8 – первое и второе устройства запоминания (УЗ);
4, 6 – первый и второй вычислители;
5, 7 – первое и второе устройства сравнения (УС).
Устройство содержит бортовой пеленгатор 1, навигационную систему 2, выходы которых соединены с первым и вторым входом первого устройства запоминания 3 соответственно. Выход первого устройства запоминания 3 через последовательно соединенные первый вычислитель 4, первое устройство сравнения 5, второй вычислитель 6 и второе устройство сравнения 7 с входом второго устройства запоминания 8.
Устройство для реализации заявляемого способа работает следующим образом.
Сигналы от наземного ИРИ поступают на вход бортового пеленгатора 1, измеряющего пеленги по азимуту 

Если это условие не выполняется, то система продолжает работать в режиме ожидания поступления очередного пеленга с выхода БП 1. После поступления на вход УЗ 3 вновь полученного (очередного) пеленга его параметры запоминаются, затем подаются на вход первого вычислителя 4, которое выполняет вышеперечисленные операции.
В случае попадания угла 


Далее с выхода второго УВ 6 на вход второго УС 7 поступают значения углового размера с значением поправки. По этим данным второе УС 7 реализует проверку попадания текущих пеленгов в пределы сектора. Во втором УЗ 8 формируется список отождествленных с ИРИ пеленгов и соответствующих им координат точек пеленгования 
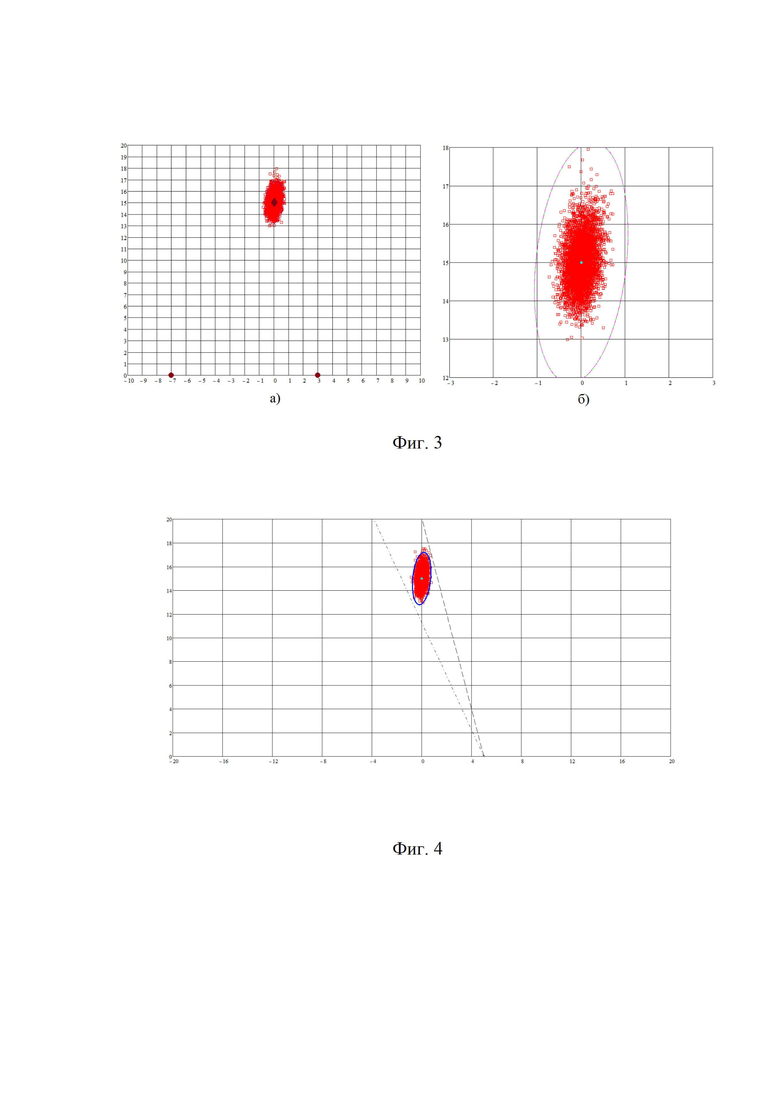
Результаты моделирования предлагаемого способа. Моделирование предлагаемого способа пространственного отождествления пеленгов с наземными источниками радиоизлучения и способа-прототипа проведено в программе Matchad. На фиг. 3а приведены результаты определения опорных координат ИРИ по 1000 реализациям несмещенных гауссовских пеленгов с СКО 1 градус. Координаты опорных точек пеленгования (0, -7) и (0, 3), координаты ИРИ (15, 0). Угол между опорными пеленгами 
С целью проверки работоспособности и анализа показателей эффективности предлагаемого способа и прототипа в случае, когда СКО пеленгования изменяется по величине, проведено статистическое моделирование следующей ситуации (фиг. 4). Координаты опорных точек пеленгования (0, -7) и (0, 3), координаты ИРИ (15, 0), координаты текущей точки пеленгования (0, 5). СКО пеленгования в опорных точках одинакова и равна 1 градусу. В текущей точке СКО пеленгования изменяется от 1 до 2,5 градусов. Размеры эллипса соответствовали доверительной вероятности 0,998. Поправка границ углового размера ДО составляла равной 

На фиг. 5 представлена зависимость вероятности правильного отождествления пеленгов к ИРИ предлагаемым способом от отношения СКО пеленгования в текущей точке к СКО пеленгования в опорных точках. Пунктиром обозначена вероятность правильного отождествления пеленгов к ИРИ, соответствующая прототипу. Видно, что увеличение СКО пеленгования в текущей точке вероятность правильного отождествления пеленгов к ИРИ уменьшается. Ввиду того, что ДО прототипа определяется по величине СКО пеленгования в опорных точках, увеличение СКО с 1 до 2.5 градусов приводит к снижению вероятности отождествления с 0,97 до 0,63. При этом вероятность отождествления пеленгов к ИРИ предлагаемым способом уменьшается незначительно, менее чем на 0,05.
Таким образом, результаты моделирования подтверждают наличие преимуществ предлагаемого способа относительно прототипа по величине вероятности правильного отождествления пеленгов к ИРИ, в части более корректного описания формы и параметров доверительной области, а также в условиях изменения точности пеленгования ИРИ в процессе движения. Перечисленные преимущества обеспечивают повышение эффективности отождествления пеленгов с наземными источниками радиоизлучения в системах воздушного радиомониторинга.
Достигаемый технический результат – повышение вероятности правильного отождествления пеленгов к одному и тому же наземному ИРИ и точности определения координат ИРИ.
Технический результат достигается за счет того, что в предлагаемом способе обеспечивается учет как ошибок пеленгования ИРИ, так и ошибок при определении координат ИРИ триангуляционным способом за счет использования при отождествлении эллиптической доверительной области, параметры ориентации которой и значения полуосей эллипса определяются текущими параметрами расположения опорных точек пеленгования и ИРИ, а также заданной требуемой доверительной вероятностью отождествления и в общем случае различными по величине среднеквадратическими ошибками пеленгования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ комплексирования пеленга и координат источника радиоизлучения | 2022 |
|
RU2799498C1 |
| АДАПТИВНЫЙ СПОСОБ ПРОСТРАНСТВЕННОГО ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ С НАЗЕМНЫМИ ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2686481C1 |
| Способ одноэтапного адаптивного определения координат источников радиоизлучений | 2021 |
|
RU2768011C1 |
| Способ стробового отождествления сигналов с источниками радиоизлучения в многоцелевой обстановке | 2020 |
|
RU2752863C1 |
| Способ определения географических координат источников радиоизлучения в многоцелевой обстановке | 2021 |
|
RU2773307C1 |
| Угломерно-корреляционный способ определения местоположения наземных источников радиоизлучения | 2021 |
|
RU2764149C1 |
| Способ обнаружения и азимутального пеленгования наземных источников радиоизлучения с летно-подъемного средства | 2020 |
|
RU2732505C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО РАДИОИЗЛУЧАЮЩЕГО ОБЪЕКТА | 2020 |
|
RU2739060C1 |
| СПОСОБ ЗАХОДА САМОЛЕТА НА ПОСАДКУ В АВАРИЙНЫХ УСЛОВИЯХ (ВАРИАНТЫ) | 2012 |
|
RU2509684C2 |
| Способ двухмерного моноимпульсного пеленгования источников радиоизлучений | 2019 |
|
RU2696095C1 |

Изобретение относится к области радиотехники и может быть использовано в одно- и многопозиционных системах воздушного радиомониторинга для повышения эффективности отождествления пеленгов с наземными источниками радиоизлучения (ИРИ). Технический результат – повышение вероятности правильного отождествления пеленгов к одному и тому же наземному ИРИ и точности определения координат ИРИ. Технический результат достигается за счет того, что в предлагаемом способе обеспечивается учет как ошибок пеленгования ИРИ, так и ошибок при определении координат ИРИ триангуляционным способом за счет использования при отождествлении эллиптической доверительной области, параметры ориентации которой и значения полуосей эллипса определяются текущими параметрами расположения опорных точек пеленгования и ИРИ, а также заданной требуемой доверительной вероятностью отождествления и в общем случае различными по величине среднеквадратическими ошибками пеленгования. 5 ил.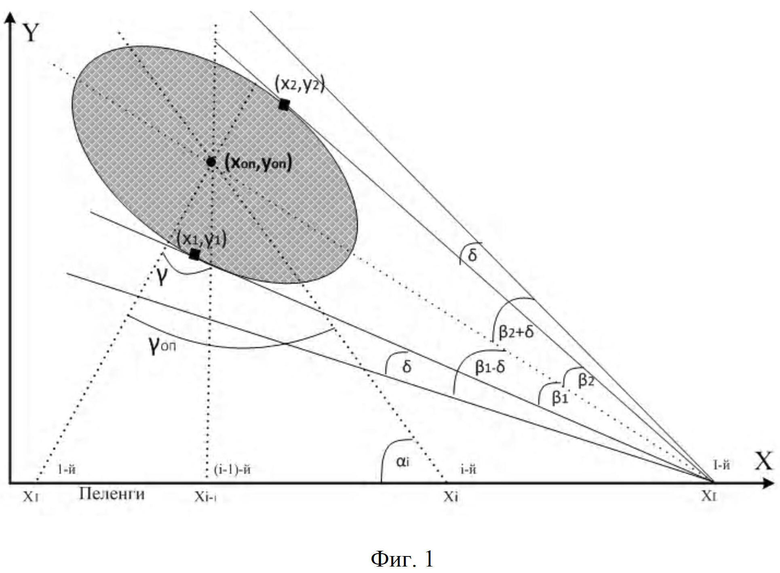
Способ пространственного отождествления пеленгов с наземными источниками радиоизлучения (ИРИ), заключающийся в пеленговании наземного неподвижного ИРИ из i-й точки для определения пеленгов по азимуту αi, где 







где число k определяет размеры эллипсоида в соответствии с равенством:











определяют координаты (



где 






проверяют условие попадания пеленга в i-ой точке пеленгования на ИРИ в пределы сектора

где 


| АДАПТИВНЫЙ СПОСОБ ПРОСТРАНСТВЕННОГО ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ С НАЗЕМНЫМИ ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2686481C1 |
| Способ двухмерного моноимпульсного пеленгования источников радиоизлучений | 2019 |
|
RU2696095C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2018 |
|
RU2695642C1 |
| Способ и устройство определения координат источника радиоизлучения | 2017 |
|
RU2659808C1 |
| Способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата | 2016 |
|
RU2610150C1 |
| УГЛОМЕРНО-КОРРЕЛЯЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2458358C1 |
| US 8963775 B2, 24.02.2015 | |||
| JP 2010266228 A, 25.11.2010 | |||
| JP 2003194907 A, 09.07.2003 | |||
| US 6329947 B2, 11.12.2001 | |||
| СПОСОБ ПОДГОТОВКИ РАСТИТЕЛЬНОГО СЫРЬЯ ПЕРЕД ИЗВЛЕЧЕНИЕМ СОКА | 2002 |
|
RU2214748C1 |

