Изобретение относится к системам автоматического управления и регулирования, в частности к гиростабилизирующим устройствам, и используется для обеспечения стабилизации поля зрения и управления линией визирования оптических приборов, размещаемых на подвижных объектах.
Известна система стабилизации линии визирования, описанная в патенте РФ №2102785 (кл. G02B) и обеспечивающая стабилизацию поля, зрения и управление линией визирования оптических приборов в двух плоскостях (так называемая двухканальная система). Данная система обладает таким недостатком, как недостаточно высокая точность стабилизации при качке объекта, обусловленная механическим трением.
Наиболее близкой по технической сущности и достигаемому результату к заявляемому изобретению является система стабилизации линии визирования, описанная в диссертационной работе А. И. Коршунова «Методы и средства повышения эффективности гирооптических систем управления объектом» (далее по тексту - диссертации), фонд Российской Государственной библиотеки, 2005 г. Данная система стабилизации линии визирования (далее по тексту - система) принята за прототип. В соответствии с изложенным в диссертации описанием системы могут быть выполнены с произвольным количеством каналов (или плоскостей, контуров) стабилизации, с одной и той же структурой каждого канала стабилизации (см. с.27, 28, 82 диссертации). Поэтому принципиально - может быть рассмотрена структурная схема одного контура соответственно одноканальной системы, а затем при необходимости такая схема может быть распространена на необходимое количество каналов в конкретном изделии при построении многоканальных систем. В изложенном ниже описании будет использован такой же подход.
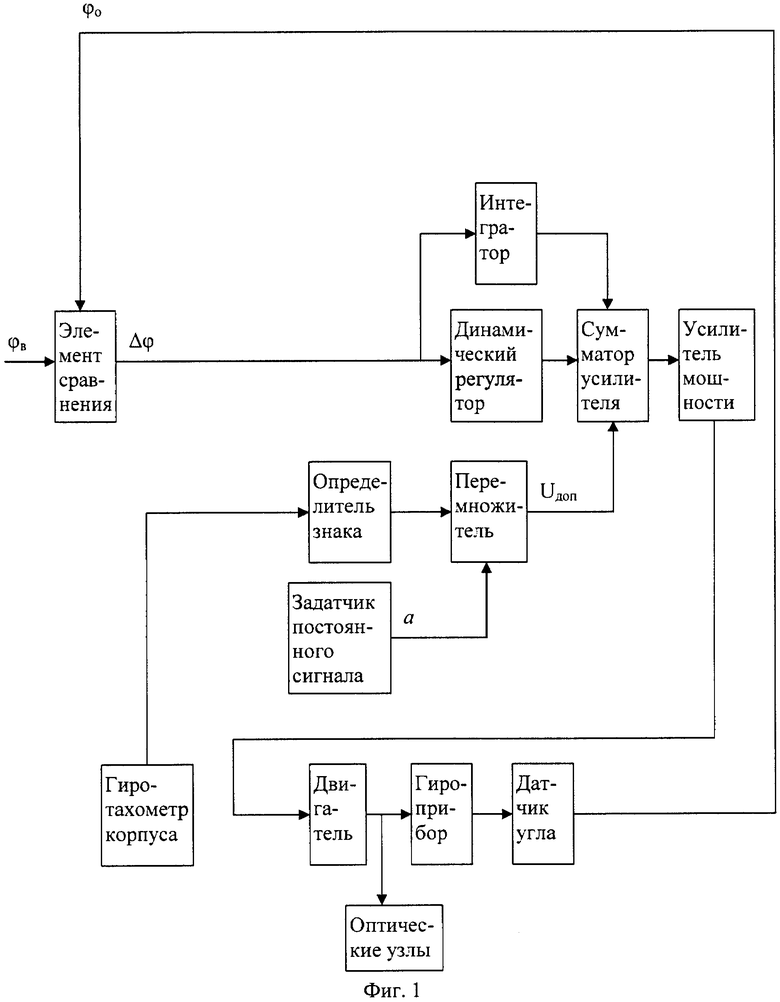
Согласно описанию из раздела 1.3 (см. с.28-31) и раздела 3.2 (см. с.82-86) диссертации система-прототип имеет (см. фиг.1) элемент сравнения, динамический регулятор, интегратор, сумматор усилителя, усилитель мощности, двигатель, оптические узлы, гироприбор, датчик угла, гиротахометр корпуса, определитель знака, перемножитель, задатчик постоянного сигнала. Управляющий сигнал φв поступает на элемент сравнения, где вычисляется разность Δφ между ним и текущим значением от датчика угла φo, которая через динамический регулятор, интегратор, сумматор усилителя, усилитель мощности и двигатель обеспечивает разворот гироприбора так, что разность Δφ приближается к нулю. При этом разворачиваются и соответствующие оптические узлы, связанные с двигателем, для перемещения или стабилизации положения линии визирования. Из-за наличия в системе механического трения и прочих возмущающих воздействий (см. с.18, 19 диссертации) достичь нулевой разности невозможно.
Таким образом, всегда есть ошибка стабилизации системы, причем, как показано в диссертации (см. с.100), ошибка в основном определяется величиной трения. Для повышения точности стабилизации линии визирования (т.е. для уменьшения ошибки стабилизации) путем частичной компенсации воздействия трения согласно описанию, приведенному в диссертации (см. с.100-104), в системе-прототипе имеется гиротахометр корпуса, определитель знака сигнала с гиротахометра корпуса, задатчик постоянного сигнала а и перемножитель, выходной компенсирующий сигнал Uдоп которого поступает на сумматор усилителя (см. фиг.1). В связи с изменением трения в процессе эксплуатации системы (вследствие прикатки подвижных узлов, износа и старения материалов и др.) со временем происходит недокомпенсация или перекомпенсация воздействия трения, что определяет, в свою очередь, рост ошибки. Это вызвано тем, что компенсирующий сигнал Uдоп изначально задается постоянным по модулю и определяется значением постоянного сигнала а.
Недостатками системы-прототипа являются:
- низкая точность стабилизации линии визирования, обусловленная недостаточно точной компенсацией воздействия трения;
- наличие дополнительного устройства - гиротахометра корпуса.
Заявляемое изобретение решает задачу повышения точности стабилизации линии визирования и удешевления системы за счет альтернативного способа уменьшения воздействия трения и исключения дополнительного устройства (гиротахометра корпуса) соответственно.
Для достижения указанного технического результата в систему стабилизации линии визирования), содержащую элемент сравнения, на первый вход которого поступает внешний управляющий сигнал, а второй вход подключен к выходу датчика угла, причем выход элемента сравнения подключен к динамическому регулятору и интегратору, сумматор усилителя, к первому входу которого подключен выход динамического регулятора, ко второму входу подключен выход интегратора, усилитель мощности, к входу которого подключен выход сумматора усилителя, двигатель, подключенный к выходу усилителя мощности, гироприбор, связанный с двигателем и датчиком угла, оптические узлы, связанные с выходом двигателя, согласно изобретению дополнительно введены дифференциатор, вход которого подключен к выходу датчика угла, компаратор, вход которого подключен к выходу дифференциатора, умножитель, первый вход которого подключен к выходу дифференциатора, второй вход подключен к выходу компаратора, а третий вход подключен к выходу элемента сравнения, усилитель, вход которого подключен к выходу умножителя, сумматор, первый вход которого подключен к выходу усилителя, а второй вход подключен к выходу элемента сравнения, причем вход интегратора подключен к выходу сумматора.
При этом из системы-прототипа исключены гиротахометр корпуса, определитель знака, задатчик постоянного сигнала и перемножитель с соответствующими связями.
Сопоставительный анализ с прототипом показывает, что заявляемая система отличается наличием новых элементов (дифференциатора, компаратора, умножителя, усилителя, сумматора) и исключением некоторых элементов (гиротахометра корпуса, определителя знака, задатчика постоянного сигнала, перемножителя). Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые элементы достаточно хорошо известны в технике (см., например, Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - 3-е изд., испр. - М.: Наука. Главная редакция физико-математической литературы, 1975. - 768 с: ил.), могут быть легко включены в цифровой контур управления системы на основе процессора (см. с.31 диссертации) и, при их введении в указанной связи в систему, а также исключении указанных элементов позволяет решить задачу повышения точности стабилизации линии визирования и удешевления системы.
На фиг.1 приведена структурная схема системы-прототипа.
На фиг.2 представлена структурная схема заявляемой системы.
Система содержит элемент сравнения 1, на первый вход которого поступает внешний управляющий сигнал, а второй вход подключен к выходу датчика угла 2, интегратор 3, динамический регулятор 4, вход которого подключен к выходу элемента сравнения 1, сумматор усилителя 5, к первому входу которого подключен выход динамического регулятора 4, а ко второму входу подключен выход интегратора 3, усилитель мощности 6, к входу которого подключен сумматор усилителя 5, двигатель 7, подключенный к выходу усилителя мощности 6, гироприбор 8, связанный с двигателем 7 и датчиком угла 2, оптические узлы 9, связанные с выходом двигателя 7, дифференциатор 10, вход которого подключен к выходу датчика угла 2, компаратор 11, вход которого подключен к выходу дифференциатора 10, умножитель 12, первый вход которого подключен к выходу дифференциатора 10, второй вход подключен к выходу компаратора 11, а третий вход подключен к выходу элемента сравнения 1, усилитель 13, вход которого подключен к выходу умножителя 12, сумматор 14, первый вход которого подключен к выходу усилителя 13, а второй вход подключен к выходу элемента сравнения 1, причем выход сумматора 14 подключен к входу интегратора 3.
Система стабилизации линии визирования работает следующим образом.
Управляющий сигнал φв поступает на элемент сравнения 1, где вычисляется разность Δφ между ним и текущим значением от датчика угла 2 φo, которая через динамический регулятор 4, первый вход сумматора 14 и интегратор 3, сумматор усилителя 5, усилитель мощности 6 и двигатель 7 обеспечивает разворот гироприбора 8 так, что разность Δφ приближается к нулю. При этом разворачиваются и соответствующие оптические узлы 9, связанные с двигателем 7, для перемещения или стабилизации положения линии визирования. Компаратор 11 формирует нулевой выходной сигнал при превышении модуля дифференциала сигнала φo, поступающего от дифференциатора 10, значения порога срабатывания компаратора 11, или единичный выходной сигнал при недостижении порога срабатывания компаратора 11.
Умножитель 12 формирует на своем выходе значение, равное произведению сигналов дифференциатора 10, элемента сравнения 1 и компаратора 11.
Полученный сигнал после усиления и коррекции поступает на интегратор 3 через второй вход сумматора 14, обеспечивая, таким образом, формирование дополнительного сигнала, частично компенсирующего воздействие внешних возмущений, в частности, трения, что уменьшает ошибку стабилизации линии визирования без использования гиротахометра корпуса. Величина этого дополнительного сигнала за счет предлагаемого варианта связей и вновь введенных элементов формируется в зависимости от фактических (текущих) значений параметров системы, которые влияют на ошибку стабилизации линии визирования, вызванную изменениями внешних возмущений, в том числе и изменениями моментов трения. Таким образом, в отличие от прототипа, в котором дополнительный сигнал задается постоянной величиной, и при этом возможна недокомпенсация или перекомпенсация, в предлагаемом варианте структурной схемы дополнительный сигнал формируется зависимости от текущих значений-координат системы, что в итоге позволяет повысить точность стабилизации линии визирования.
Заявляемое изобретение позволяет повысить точность стабилизации линии визирования и одновременно удешевить систему за счет альтернативного способа уменьшения воздействия трения и исключения дополнительного устройства (гиротахометра корпуса) соответственно.
С использованием предлагаемого технического решения в ОАО «СКБ ПА» разработан стабилизатор МКРН.469119.012 в рамках работ по модернизации прицельного комплекса ПНК-4С-01 производства ОАО «РОМЗ» г. Ростов, в котором стабилизация поля зрения по вертикали обеспечивается за счет стабилизации головного зеркала, кинематически связанного со стабилизатором.
Результаты испытаний опытных образцов стабилизаторов подтвердили эффективность предлагаемых технических решений. Ошибка стабилизации поля зрения в условиях заданных внешних воздействий не превышала 0,1 т.д., что позволило в 3 раза улучшить значение данного параметра, установленное для серийных образцов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ ОПТИЧЕСКИХ КАНАЛОВ | 2024 |
|
RU2831620C1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2011 |
|
RU2461799C1 |
| ПРИВОД НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ ТАНКОВОГО ВООРУЖЕНИЯ | 2003 |
|
RU2238506C1 |
| ГИРОТАХОМЕТР | 2006 |
|
RU2325659C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАТЧИКОВ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2241247C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2021 |
|
RU2781092C1 |
| Нелинейная следящая система | 1989 |
|
SU1615672A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2002 |
|
RU2225024C1 |
| Система стабилизации изображения на подвижном основании | 2017 |
|
RU2733324C2 |
Система содержит элемент сравнения, на первый вход которого поступает внешний управляющий сигнал, а второй вход подключен к выходу датчика угла. Выход элемента сравнения подключен к динамическому регулятору и интегратору. К первому входу сумматора усилителя подключен выход динамического регулятора, ко второму входу подключен выход интегратора. К входу усилителя мощности подключен выход сумматора усилителя. Двигатель подключен к выходу усилителя мощности. Гироприбор связан с двигателем и датчиком угла. Оптические узлы связаны с выходом двигателя. Вход дифференциатора подключен к выходу датчика угла. Вход компаратора подключен к выходу дифференциатора. Первый вход умножителя подключен к выходу дифференциатора, второй вход подключен к выходу компаратора, а третий вход подключен к выходу элемента сравнения. Вход усилителя подключен к выходу умножителя. Первый вход сумматора подключен к выходу усилителя, а второй вход подключен к выходу элемента сравнения. Вход интегратора подключен к выходу сумматора. Технический результат - повышение точности стабилизации линии визирования. 2 ил.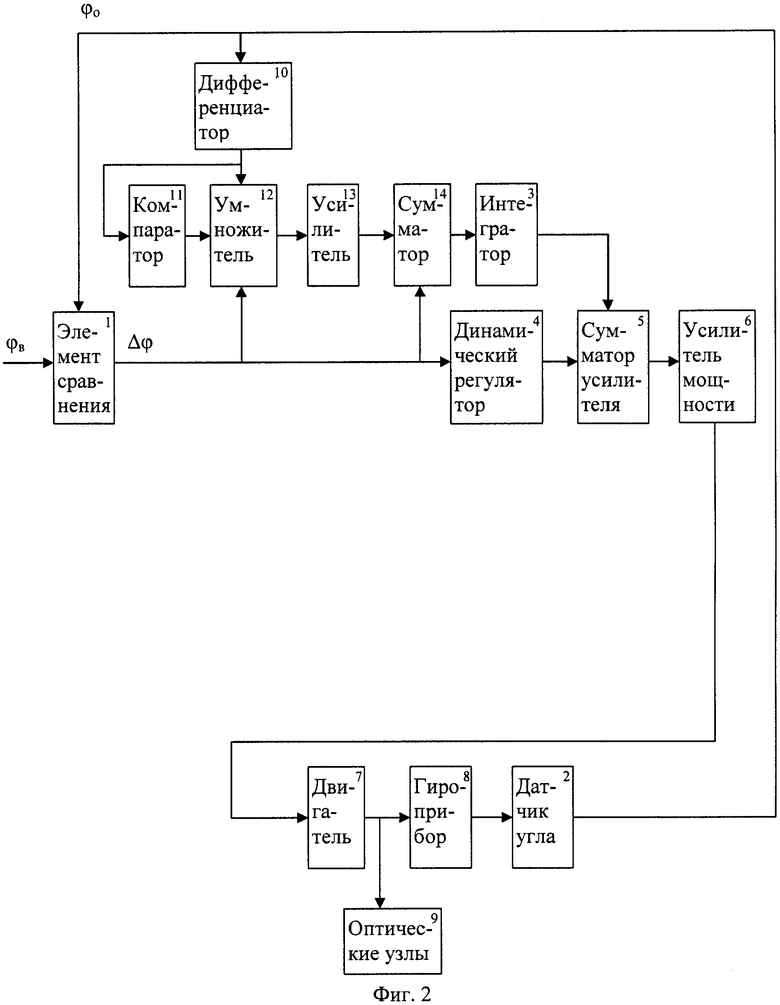
Система стабилизации линии визирования, содержащая элемент сравнения, на первый вход которого поступает внешний управляющий сигнал, а второй вход подключен к выходу датчика угла, причем выход элемента сравнения подключен к динамическому регулятору и интегратору, сумматор усилителя, к первому входу которого подключен выход динамического регулятора, ко второму входу подключен выход интегратора, усилитель мощности, к входу которого подключен выход сумматора усилителя, двигатель, подключенный к выходу усилителя мощности, гироприбор, связанный с двигателем и датчиком угла, оптические узлы, связанные с выходом двигателя, отличающаяся тем, что в нее дополнительно введены дифференциатор, вход которого подключен к выходу датчика угла, компаратор, вход которого подключен к выходу дифференциатора, умножитель, первый вход которого подключен к выходу дифференциатора, второй вход подключен к выходу компаратора, а третий вход подключен к выходу элемента сравнения, усилитель, вход которого подключен к выходу умножителя, сумматор, первый вход которого подключен к выходу усилителя, а второй вход подключен к выходу элемента сравнения, причем вход интегратора подключен к выходу сумматора.
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1996 |
|
RU2104578C1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2004 |
|
RU2260773C1 |

