Изобретение относится к области оптического приборостроения и может быть использовано в гиростабилизированных устройствах, размещаемых на подвижных объектах, для повышения точности стабилизации при знакопеременных воздействиях на объект, а также повышения скоростей управления.
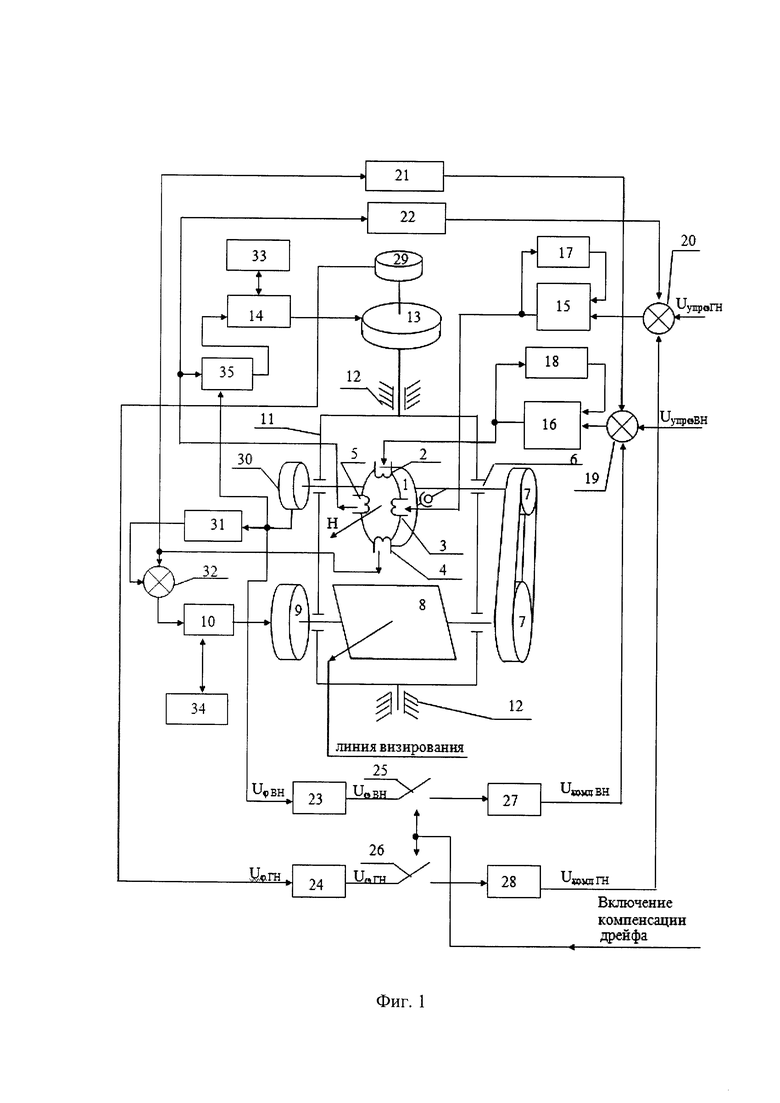
Известна система [1] стабилизации изображения на подвижном основании, изображенная на фиг. 1, содержащая индикаторную гироскопическую платформу с установленным на ней зеркалом 8, карданов подвес в виде наружной 11 и внутренней рам с подшипниками 12, трехстепенной гироскопический датчик угла (ГДУ) с гиромотором 1, датчиками 2, 3 момента (ДМ) и датчиками 4, 5 угла поворота ротора (ДУПР) ГДУ, выходы которых через усилительно-корректирующие 10, 14 устройства (УКУ) соответствующих каналов стабилизации соединены с входами датчиков 9, 13 стабилизации (ДС) рам подвеса, два канала управления скоростью разворота платформы (КУСРП) с усилительными 15, 16 звеньями (УЗ) в каждом канале, подключенным к входу соответствующего ДМ ГДУ, два пороговых устройства 21, 22 для защиты ротора (ПУЗР) ГДУ от удара об механические упоры, своими входами подключенные к ДУПР ГДУ, а выходами, через первый и второй сумматоры 19, 20, подключенные к первым входам УЗ КУСРП, и два устройства 33, 34 защиты от перегрева (УЗП) ДС, каждое из которых состоит из интегратора (И), порогового устройства (ПУ), электронного ключа (ЭК) и двухполярного ограничителя напряжения, соединенные с УКУ каждого канала стабилизации; ГДУ установлен на вспомогательной оси 6, которая через ленточную 7 передачу 1:2 связана с зеркалом; в систему также входят: устройство 31 компенсации ошибки ленточной передачи (УКОЛП), два устройства 17, 18 защиты от перегрева (УЗП) ДМ ГДУ, два устройства компенсации дрейфа линии визирования (УКДЛВ), состоящие из дифференциаторов 23, 24, ключей 25, 26, интеграторов 27, 28, и датчики угла вертикального ДУ ВН 30 и горизонтального наведения ДУ ГН 29, соединенные со входами УКДЛВ, причем датчик угла вертикального наведения соединен также со входом УКОЛП, выход которого соединен через третий сумматор 32 со входом УКУ по каналу вертикального наведения, выходы УКДЛВ соединены через первый и второй сумматоры с первыми входами УЗ КУСРП, входы УЗП ДМ ГДУ соединены с выходами УЗ КУСРП, а их выходы со вторыми входами УЗ КУСРП.
Недостатком системы [1] стабилизации является недостаточная точность стабилизации при знакопеременных воздействиях на объект, обусловленная влиянием моментов трения в подшипниках карданова подвеса по каналам ВН и ГН, а в канале ВН, кроме того, суммарного момента инерции зеркала и вспомогательной оси. Еще одним недостатком системы стабилизации является невозможность управления платформой с большими скоростями разворота, связанная с перегревом датчиков момента ГДУ.
Целью изобретения является снижение влияния моментов трения и инерции подвижной части на точность стабилизации, а также реализация более эффективного способа управления ГДУ, обеспечивающего повышение скоростей разворота платформы.
Технический результат заключается в повышении точностных и скоростных параметров системы стабилизации.
Задачами, на решение которых направлено изобретение, являются снижение величин составляющих ошибки стабилизации, вызванных противодействующими моментами сопротивления карданова подвеса и повышение скоростей управления при условии обеспечения температурного режима ГДУ.
Поставленные задачи решаются за счет того, что система стабилизации изображения на подвижном основании, содержащая индикаторную гироскопическую платформу с установленным на ней зеркалом, карданов подвес, выполненный в виде наружной и внутренней рам, трехстепенной гироскопический датчик угла (ГДУ) с датчиками момента (ДМ) и датчиками угла поворота ротора (ДУПР) ГДУ, выходы которых через усилительно-корректирующие устройства (УКУ) соответствующих каналов стабилизации соединены с входами датчиков стабилизации (ДС) рам подвеса, два канала управления скоростью разворота платформы (КУСРП) с усилительным звеном (УЗ) в каждом канале, подключенным к входу соответствующего (ДМ ГДУ), два пороговых устройства для защиты ротора (ПУЗР) ГДУ от удара о механические упоры, своими входами подключенные к ДУПР ГДУ, а выходами, через первый и второй сумматоры, подключенные к первым входам УЗ КУСРП, и два устройства защиты от перегрева (УЗП) ДС, каждое из которых состоит из интегратора (И), порогового устройства (ПУ), электронного ключа (ЭК) и двухполярного ограничителя напряжения, соединенные с УКУ каждого канала стабилизации, при этом ГДУ установлен на вспомогательной оси, которая через ленточную передачу с коэффициентом передачи 1:2 связана с зеркалом, устройство компенсации ошибки ленточной передачи (УКОЛП), два устройства защиты от перегрева (УЗП) ДМ ГДУ, два устройства компенсации дрейфа линии визирования (УКДЛВ), датчик угла вертикального наведения (ДУ ВН) и датчик угла горизонтального наведения (ДУ ГН), соединенные с входами УКДЛВ, причем ДУ ВН соединен также с входом УКОЛП, выход которого соединен через третий сумматор с входом УКУ по каналу вертикального наведения, выходы УКДЛВ соединены через первый и второй сумматоры с первыми входами УЗ КУСРП, входы УЗП ДМ ГДУ соединены с выходами УЗ КУСРП, а их выходы со вторыми входами УЗ КУСРП, согласно изобретению, содержит два устройства компенсации трения (УКТ), каждое из которых состоит из дифференциатора сигнала ошибки (ДСО) и формирователя импульсов (ФИ), выходы которых через первые входы первого и второго сумматоров (С) подключены к входам УКУ по каналам ВН и ГН, а входы со вторыми выходами УКУ по каналам ВН и ГН, устройство компенсации ошибки гиростабилизатора (УКОГ), состоящее из регулируемого усилителя (РУ) и корректирующего усилителя (КУ), выход которого соединен через второй вход первого сумматора (С) с входом УКУ по каналу ВН, а вход с ДУ ВН, и два устройства коррекции скорости (УКС), выходы которых соединены: через второй вход второго сумматора (С) с входом УКУ по каналу ГН и третий вход первого сумматора (С) с входом УКУ по каналу ВН, а входы с выходами Y3z и УЗy.
Одним отличительным признаком заявленного изобретения является введение в каналы ВН и ГН системы стабилизации изображения на подвижном основании устройств компенсации трения, а в канал ВН дополнительно - устройства компенсации ошибки гиростабилизатора, позволяющих снизить ошибку стабилизации, при знакопеременных воздействиях на объект, за счет формирования этими устройствами компенсирующих сигналов, регулируемых по амплитуде в зависимости от величин моментов трения и инерции подвижной части.
Еще одним отличительным признаком заявленного изобретения является введение дополнительно в каналы ВН и ГН системы стабилизации устройств коррекции скорости, позволяющих увеличить скорость управления за счет использования свойства примененного в системе [1] стабилизации изображения на подвижном основании ГДУ с датчиками момента электромагнитного типа.
На фиг. 1 изображена структурная схема системы [1] стабилизации.
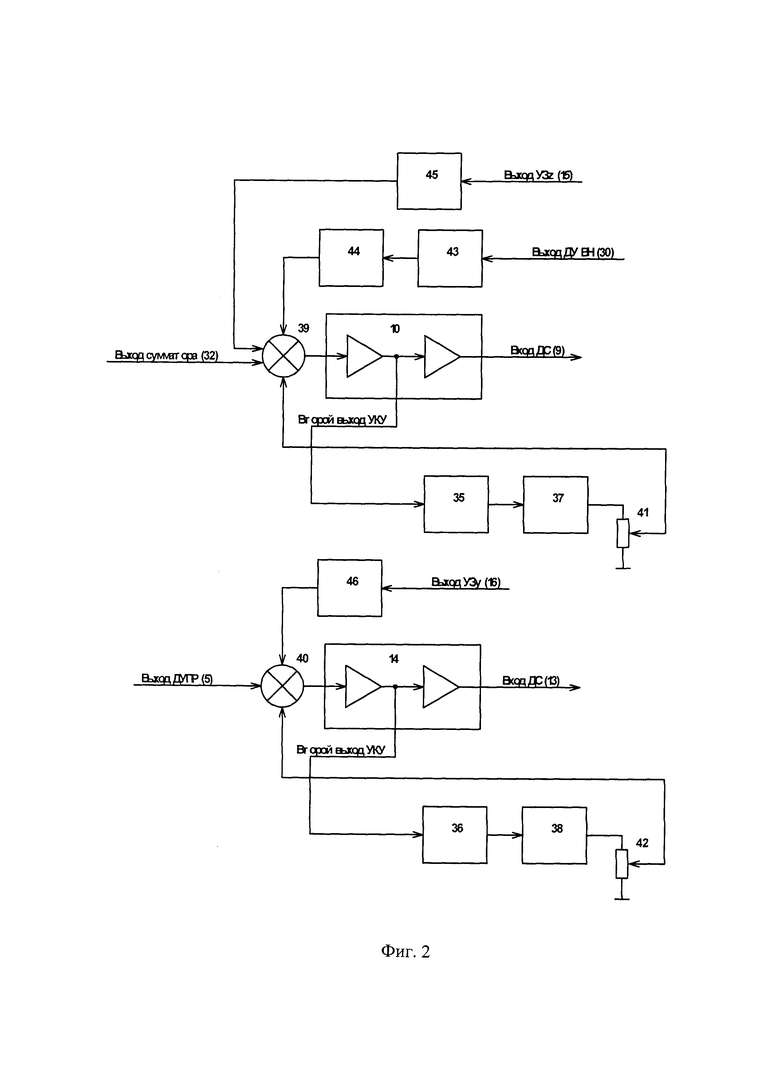
На фиг. 2 изображены структурные схемы УКТ, УКОГ, УКС и УКУ.
На фиг. 3 изображены эпюры сигналов УКТ.
На фиг. 4 изображена электрическая схема УКТ.
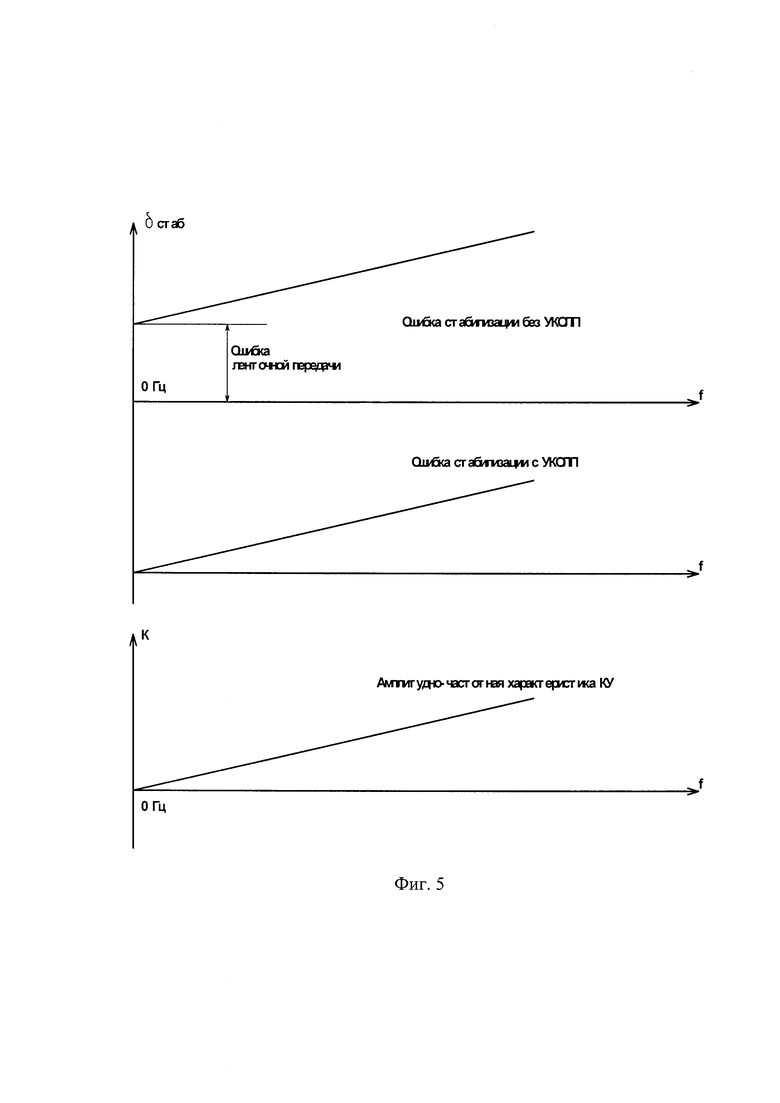
На фиг. 5 изображен график зависимости ошибки стабилизации по каналу ВН от частоты и амплитудно-частотная характеристика КУ.
На фиг. 6 изображен график зависимости между входным и выходным напряжениями УКС.
Пример реализации системы стабилизации изображения на подвижном основании.
Система стабилизации изображения на подвижном основании содержит два устройства компенсации трения (УКТ), входы которых соединены со вторыми выходами усилительно-корректирующих устройств 10 и 14 (УКУ) по каналам ВН и ГН, состоящих из дифференциаторов (35, 36) сигналов ошибки (ДСО), выделяющих из выходных сигналов первого каскада УКУ составляющие с повышенной скоростью нарастания, которые обусловлены трением и возникают при смене направления знакопеременного воздействия на объект (согласно фиг. 2 первый каскад УКУ - корректирующий усилитель, второй каскад - усилитель мощности). С выходов ДСО сигналы поступают на входы формирователей (37, 38) импульсов (ФИ), которые при достижении этими сигналами пороговых значений формируют импульсы, поступающие через первые входы первого и второго сумматоров (С) (39, 40) на входы УКУ.
Принцип работы УКТ поясняется эпюрами, изображенными на фиг. 3: 1-я эпюра - сигнал на выходе первого каскада УКУ при отключенном УКТ, 2-я эпюра - сигналы на выходах: первого каскада УКУ, ДСО и ФИ при включенном УКТ.
Повышенная ошибка при наличии трения в системе [1] стабилизации связана с ограниченной скоростью нарастания выходного напряжения УКУ (скорость ограничена за счет входящих в УКУ корректирующих RC-цепей, необходимых для обеспечения устойчивости каналов стабилизации). Возможность уменьшения ошибки (увеличения скорости нарастания) за счет расширения полос пропускания каналов стабилизации ограничена резонансными частотами конструкции карданова подвеса и в результате приводит к возникновению автоколебаний. Предлагаемое устройство позволяет сформировать сигнал управления датчиками стабилизации 9 и 13 (ДС) с максимальной скоростью нарастания для форсированного преодоления трения, при относительно небольшой полосе пропускания. Устойчивую работу УКТ при небольших величинах моментов трения обеспечивает наличие общей положительной обратной связи совместно с первым каскадом УКУ (автоматический "захват" при срабатывании за счет совпадения полярности импульсов с полярностью сигнала ошибки с ДУПР ГДУ). Регулировка компенсирующих сигналов в зависимости от величин моментов трения в каналах ВН и ГН осуществляется с помощью регулировочных (41, 42) резисторов (R1, R2) на выходах ФИ. Электрическая схема одного из каналов УКТ приведена на фиг. 4.
ДСО, состоящий из операционного усилителя D1 и интегрирующей RC-цепочки R1C1, формирует трапецеидальные импульсы, фронты которых совпадают с составляющими сигнала ошибки с высокими скоростями нарастания напряжения. Импульсы поступают на вход ФИ на операционном усилителе D2, представляющий из себя компаратор с переключаемыми порогами срабатывания. Для исключения ложных срабатываний в схему компаратора введены ФНЧ R2C2 и гистерезис через делитель напряжения R4, R3; этот делитель также определяет пороги срабатывания. Конденсатор С3 выполняет 2 функции: формирует короткие выходные импульсы для компенсации трения и блокирует переключение компаратора на формирование импульса другой полярности для устранения паразитных автоколебаний каналов стабилизации (время блокировки определяется длительностью импульса).
Устройство компенсации ошибки гиростабилизатора (УКОГ) состоит из регулируемого (43) усилителя (РУ), вход которого соединен с выходом датчика угла вертикального наведения 30 (ДУ ВН) и формирует при знакопеременном воздействии на объект переменное напряжение, пропорциональное этому воздействию. Коэффициент передачи РУ регулируется в зависимости от величины момента инерции. Выходной сигнал РУ через корректирующий (44) усилитель (КУ) поступает через второй вход первого сумматора 39 (С) на вход усилительно-корректирующего устройства 10 (УКУ) по каналу ВН. Принцип действия УКОГ похож на примененное в системе [1] стабилизации устройство компенсации ошибки ленточной передачи 31 (УКОЛП), корректирующее положение линии визирования относительно вектора Н ГДУ, за исключением наличия корректирующего усилителя, формирующего амплитудно-частотную характеристику компенсирующего сигнала аналогично частотной зависимости величины ошибки стабилизации. Данная зависимость обусловлена преодолением момента инерции подвижной части (эта составляющая ошибки стабилизации характерна только для канала ВН ввиду наличия ленточной передачи 1:2; при знакопеременном угловом движении объекта происходит такое же движение зеркала относительно внутренней рамы карданова подвеса, с половинным углом движения объекта). График зависимости ошибки стабилизации от частоты без УКОЛП, с УКОЛП и амплитудно-частотная характеристика КУ приведены на фиг. 5.
Устройства (45, 46) коррекции скорости (УКС) представляют из себя пороговые устройства, включенные перекрестно между усилительными звеньями 15 и 16 (УЗz и УЗy) и входами сумматоров С: третьим входом первого сумматора 39 (С) на входе устройства 10 (УКУ) и вторым входом второго сумматора 40 (С) на входе устройства 14 (УКУ). График зависимости между входным и выходным напряжениями УКС показан на фиг. 6. Принцип коррекции (увеличения скорости управления) основан на свойстве примененного в системе [1] стабилизации изображения на подвижном основании трехстепенного ГДУ со сферическим подшипником. Это свойство заключается в принципе действия датчиков 2 и 3 (ДМy и ДМz) момента электромагнитного типа (для каждого направления разворота платформы - свой электромагнит) - зависимости скорости управления от угла наклона ротора по перекрестной измерительной оси. При небольших скоростях управления связи между УЗ и УКУ отсутствуют, и ротор находится в нулевом положении относительно датчиков момента ГДУ (зазоры между ротором и электромагнитами противоположных направлений равны). При достижении управляющим сигналом Uyпp ω вн порогового значения возникает связь между усилительным звеном 16 (УЗy) и устройством 14 (УКУ), при достижении сигналом Uyпp ω гн такого же значения - связь между усилительным звеном 15 (Y3z) и устройством 10 (УКУ). При этом начинает происходить отклонение ротора в сторону электромагнитов, обеспечивающих управление в соответствии с полярностями сигналов Uyпp ω вн или Uупр ω гн (ротор во время действия управляющих сигналов Uyпp ω вн или Uyпp ω гн занимает ненулевое стационарное положение). Далее, при увеличении сигналов Uyпp ω вн или Uyпp ω гн выше порогового значения, происходит и дальнейшее уменьшение зазора между ротором и электромагнитом, что обеспечивает повышение скорости управления при сравнительно меньшем увеличении энергопотребления датчиками момента ГДУ.
Источники информации
1. Патент РФ №2225024, МПК G02B 27/64, приоритет от 01.07.2002 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система стабилизации изображения на подвижном основании | 2017 |
|
RU2733324C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2002 |
|
RU2225024C1 |
| Система стабилизации изображения на подвижном основании | 2019 |
|
RU2753162C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| Двухосная стабилизация изображения на подвижном основании без ограничения углов прокачки | 2023 |
|
RU2833345C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЁМ | 2013 |
|
RU2548376C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2827861C1 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2012 |
|
RU2505775C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| ДВУХОСНЫЙ УПРАВЛЯЕМЫЙ ГИРОСТАБИЛИЗАТОР | 2005 |
|
RU2293949C1 |



Изобретение относится к гиростабилизированным устройствам, размещаемым на подвижных объектах, для получения неподвижного изображения и управления линией визирования оптических приборов в вертикальной и горизонтальной плоскостях. Сущность изобретения заключается в том, что в каналы стабилизации по осям вертикального и горизонтального наведения введены устройства компенсации трения, также по оси вертикального наведения дополнительно введено устройство компенсации ошибки гиростабилизатора, снижающие ошибки стабилизации по вертикали и горизонту при знакопеременных воздействиях на объект, а также в изменении способа управления датчиками момента гироскопического датчика угла, который обеспечивает максимально возможную скорость управления в течение продолжительного времени. Технический результат - повышение точности стабилизации линии визирования, а также повышение скоростей наведения при условии обеспечения температурного режима за счет снижения энергопотребления. 6 ил.
Система стабилизации изображения на подвижном основании, содержащая индикаторную гироскопическую платформу с установленным на ней зеркалом, карданов подвес, выполненный в виде наружной и внутренней рам, трехстепенной гироскопический датчик угла (ГДУ) с датчиками момента (ДМ) и датчиками угла поворота ротора (ДУПР) ГДУ, выходы которых через усилительно-корректирующие устройства (УКУ) соответствующих каналов стабилизации соединены с входами датчиков стабилизации (ДС) рам подвеса, два канала управления скоростью разворота платформы (КУСРП) с усилительным звеном (УЗ) в каждом канале, подключенным к входу соответствующего ДМ ГДУ, два пороговых устройства для защиты ротора (ПУЗР) ГДУ от удара о механические упоры, своими входами подключенные к ДУПР ГДУ, а выходами, через первый и второй сумматоры, подключенные к первым входам УЗ КУСРП, и два устройства защиты от перегрева (УЗП) ДС, состоящие из интегратора (И), порогового устройства (ПУ), электронного ключа (ЭК) и двухполярного ограничителя напряжения, соединенные с УКУ каждого канала стабилизации, при этом ГДУ установлен на вспомогательной оси, которая через ленточную передачу с коэффициентом передачи 1:2 связана с зеркалом, устройство компенсации ошибки ленточной передачи (УКОЛП), два устройства защиты от перегрева (УЗП) ДМ ГДУ, два устройства компенсации дрейфа линии визирования (УКДЛВ), датчик угла вертикального наведения (ДУ ВН) и датчик угла горизонтального наведения (ДУ ГН), соединенные с входами УКДЛВ, причем ДУ ВН соединен также с входом УКОЛП, выход которого соединен через третий сумматор с входом УКУ по каналу вертикального наведения, выходы УКДЛВ соединены через первый и второй сумматоры с первыми входами УЗ КУСРП, входы УЗП ДМ ГДУ соединены с выходами УЗ КУСРП, а их выходы со вторыми входами УЗ КУСРП, отличающаяся тем, что содержит два устройства компенсации трения (УКТ), каждое из которых состоит из дифференциатора сигнала ошибки (ДСО) и формирователя импульсов (ФИ), выходы которых соединены через первые входы первого и второго сумматора (С) с входами УКУ по каналам ВН и ГН, а входы со вторыми выходами УКУ по каналам ВН и ГН, устройство компенсации ошибки гиростабилизатора (УКОГ), состоящее из регулируемого усилителя (РУ) и корректирующего усилителя (КУ), выход которого соединен через второй вход первого сумматора (С) с входом УКУ по каналу ВН, а вход с ДУ ВН, и два устройства коррекции скорости (УКС), выходы которых соединены через второй вход второго сумматора (С) с входом УКУ по каналу ГН и через третий вход первого сумматора (С) с входом УКУ по каналу ВН, а входы с выходами УЗz и УЗy.
| ДВУХОСНЫЙ УПРАВЛЯЕМЫЙ ГИРОСТАБИЛИЗАТОР | 2005 |
|
RU2293949C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2010 |
|
RU2430392C1 |
| US 2020192115 A1, 18.06.2020. | |||

