Изобретение относится к радиотехнике и может быть использовано для определения координат источника радиоизлучений (ИРИ), в частности для определения координат ИРИ коротковолнового (КВ) диапазона в ходе радиомониторинга.
Современные системы связи широко используют КВ диапазон частот, обеспечивающий надежность связи, минимальную зависимость от условий окружающей среды и рельефа поверхности, возможность контакта с любой точкой Земли, высокую устойчивость к помехам [1]. КВ диапазон также активно используется в системах загоризонтной радиолокации [2] и пассивной локации [3]. Определение координат ИРИ КВ диапазона является важной задачей радиомониторинга [4 с.374], в частности при необходимости принятия решения о мерах реагирования [5, с.354, 416, 511] при обнаружении сигналов ИРИ (подавление путем использования активных помех, силового воздействия и других средств, семантический анализ, создание ложных целей и т.п.). Наибольшую сложность представляет определение координат подвижных ИРИ (авиация, морской флот, автотранспорт), работающих в режиме ограниченного времени. При радиомониторинге сигналов в дальней зоне (на предельно больших расстояниях) наиболее эффективным является триангуляционное местоопределение ИРИ, для реализации которого используется несколько постов пеленгации (ПП), размещенных на значительных расстояниях друг от друга.
Быстродействие определения координат ИРИ является важным параметром при радиомониторинге, в особенности при принятии решения о мерах реагирования на вновь обнаруженный ИРИ.
Известен способ определения координат ИРИ КВ диапазона, описанный в [6, с.585-586]. Способ включает прием радиосигналов несколькими разнесенными в пространстве ПП, частотную селекцию, определение линий пеленгов, весовую обработку и регистрацию полученных данных, после чего вычисляют координаты всех попарных пересечений пеленгов на геосфере, для каждой засечки определяют ее вес с учетом погрешности измерения пеленгов, дальность от каждого ПП до ИРИ и угла схождения пеленгов в засечке. Координаты ИРИ оценивают усреднением координат засечек с учетом их веса.
Но быстродействие процесса определения координат ИРИ при использовании известного способа низкое. Это объясняется тем, что для обеспечения точности пеленгования, необходимой для принятия решения о мерах реагирования на появление ИРИ, приходится производить многократное повторное измерение и отбор пеленгов с использованием сложной вычислительной процедуры вследствие влияния состояния ионосферы и изменения поляризации контролируемого сигнала. С увеличением расстояний от каждого ПП до ИРИ, их различия, базы пеленгования это влияние усиливается [7, с.221], появляются зоны молчания и неопределенности, в которых определение местоположения ИРИ проблематично.
Для компенсации ошибок пеленгования, вызванных влиянием ионосферы, используют долговременное прогнозирование состояния ионосферы [8]. Но при пеленговании в дальней зоне и значительных расстояниях между ПП появляется многозначность в данных долгосрочного прогнозирования состояния ионосферы, а в случае непредсказуемого при радиомониторинге района нахождения ИРИ учет данных прогнозирования становится невозможным.
Известен способ определения координат ИРИ (радиолокационных станций - РЛС), основанный на сопоставлении принимаемых сигналов неизвестной РЛС с известной картой местности [9]. Способ включает прием ПП радиосигналов ИРИ, частотную селекцию, определение линий пеленгов, регистрацию и сопоставление полученных данных с картой известной местности. Для большей достоверности воспроизводимой информации при приеме сигналов РЛС вводится коррекция на коэффициент 1/(1-cosβη), где βη - текущее значение азимута. Коррекция выравнивает задержки распространения сигналов, отраженных от целей и «местников», с задержкой распространения зондирующего сигнала РЛС и приближает изображение источника на индикаторе обзора ПП к изображению неизвестной РЛС, за счет чего повышается быстродействие местоопределения ИРИ.
Способ позволяет не только определять координаты РЛС, но и следить за неизвестными целями пассивным методом.
Недостатком известного способа является зависимость быстродействия определения координат источника от режима работы РЛС. Кроме того, недостатком известного способа является также узкая функциональная направленность, не позволяющая его использовать при определении координат других видов ИРИ.
Наиболее близким по технической сущности к заявляемому объекту является способ определения координат ИРИ КВ диапазона, сущность которого описана в [10] (прототип). Способ включает прием сигналов в нескольких точках пространства, частотную селекцию, определение линий пеленгов, весовую обработку и регистрацию полученных данных. Линии пеленгов определяют в плоскости пеленгаторной антенны, а по результатам весовой обработки формируют вспомогательные плоскости, ортогональные плоскости пеленгаторной антенны и проходящие через каждую полученную линию пеленга. Определяют линии положения ИРИ как линии пересечения каждой вспомогательной плоскости с поверхностью Земли и вычисляют координаты ИРИ как точки пересечения линий положения ИРИ.
Способ позволяет существенно повысить быстродействие и точность определения координат ИРИ в ближней зоне радиомониторинга.
Однако при контроле сигналов в дальней зоне радиомониторинга быстродействие при определении координат известным способом недостаточно, в частности для принятия тех или иных мер реагирования. Это объясняется тем, что известный способ основывается на представлении части поверхности Земли в виде плоскости, на которой производят операции местоопределения ИРИ. Но в дальней зоне радиомониторинга сферичность поверхности приведет к искажению значений координат и, соответственно, к увеличению пространства ошибок [11, с.259, 260]. Оценка точки наиболее вероятных координат ИРИ с допустимой для принятия решения о мерах реагирования ошибкой требует сложной процедуры разрешения пространственного многогранника ошибок, многократного повторного пеленгования, снижающего быстродействие при местоопределении ИРИ, и в случаях подвижного ИРИ и ограниченного времени излучения неэффективна. Быстродействие процесса местоопределения ИРИ при использовании известного способа ограничивается также временем полета летательного аппарата, на котором размещен ПП.
Целью изобретения является повышение быстродействия и точности определения координат ИРИ в дальней зоне радиомониторинга.
Поставленная цель достигается за счет того, что в известный способ определения координат ИРИ КВ диапазона, включающий прием радиосигналов несколькими разнесенными в пространстве ПП, частотную селекцию, определение линий пеленгов, весовую обработку и регистрацию, введены операции, при выполнении которых для каждого полученного пеленга строят трехмерный вектор измерения как вектор нормали к плоскости, проходящей через центр Земли, пеленгационную позицию и образующей линию пеленга при пересечении с поверхностью Земли, для каждого измеренного пеленга находят матрицу измерения размерностью 3×3 путем диадного [12, с.509] произведения вектора измерения на его транспонированное значение, суммируют все полученные матрицы измерений, строят эллипсоид по задаваемым элементами суммарной матрицы коэффициентам уравнения второго порядка, определяют ориентацию эллипсоида в пространстве и находят подлежащие регистрации координаты ИРИ как координаты точки пересечения главной оси эллипсоида с поверхностью Земли.
Введение новых операций позволяет существенно повысить быстродействие при определении координат ИРИ в ходе радиомониторинга в дальней зоне за счет исключения процедуры многоэтапной оценки пространственных ошибок и определения точки наиболее вероятных координат ИРИ, что дает возможность обеспечить своевременное принятие мер реагирования и достоверной регистрации ИРИ.
Сочетание отличительных признаков и свойства предлагаемого способа определения координат ИРИ КВ диапазона из патентных источников не известны, поэтому он соответствует критериям новизны и изобретательского уровня.
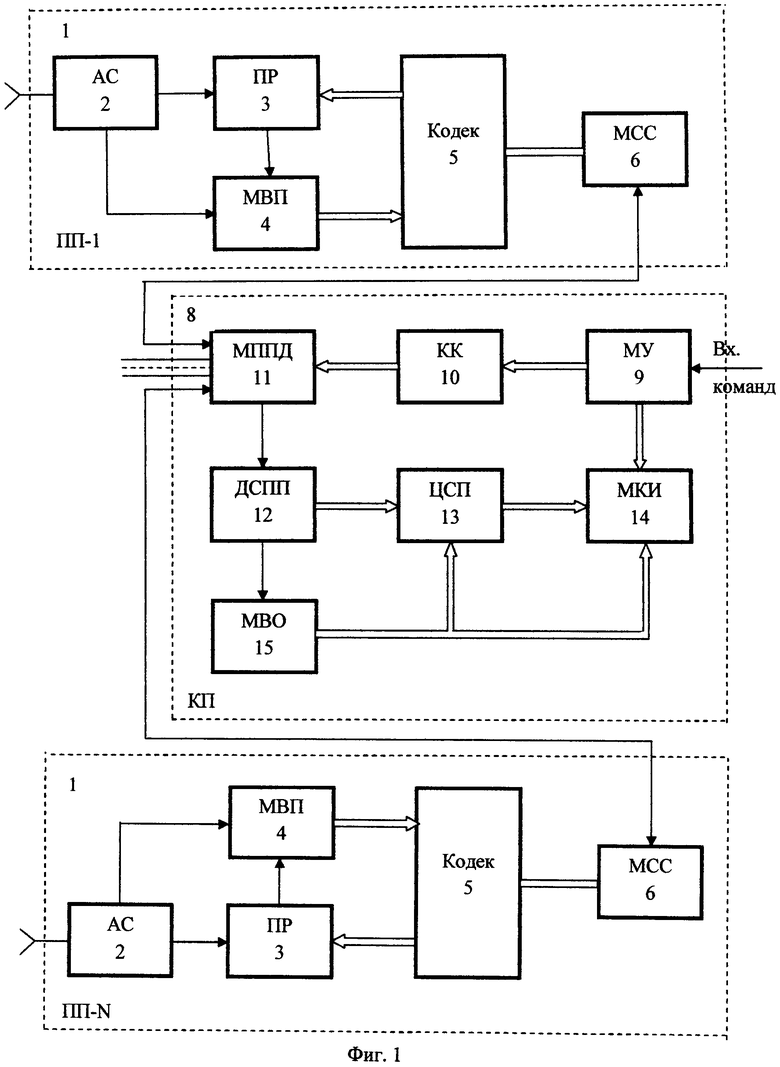
На фиг.1 приведена функциональная схема комплекса средств определения координат ИРИ, реализующего предложенный способ;
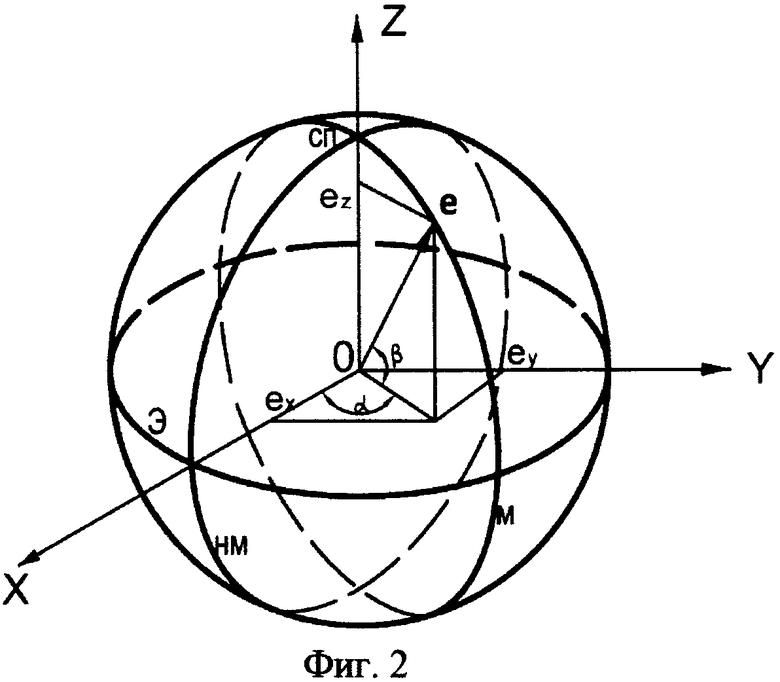
на фиг.2 - сферическая система координат при пеленговании ИРИ;
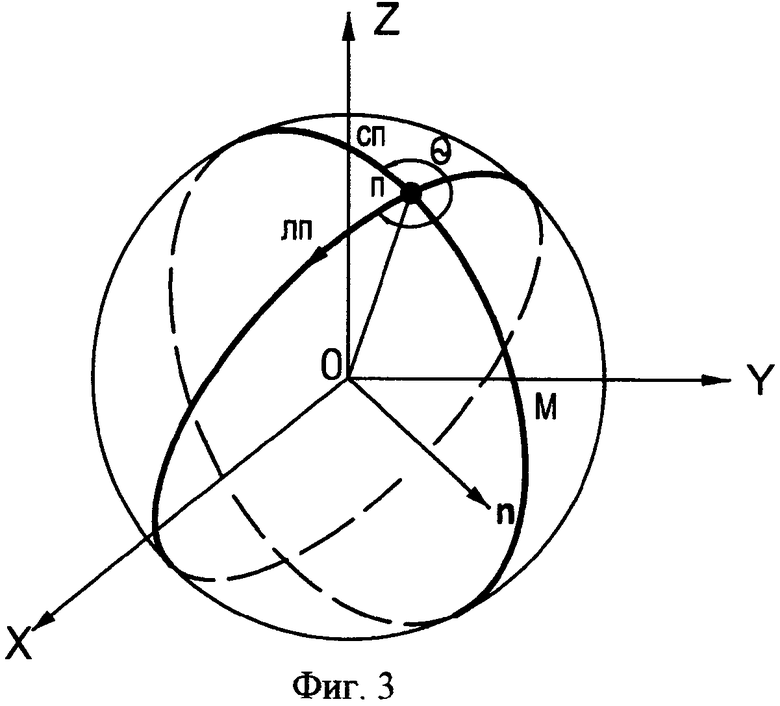
на фиг.3 - схема построения вектора измерения;
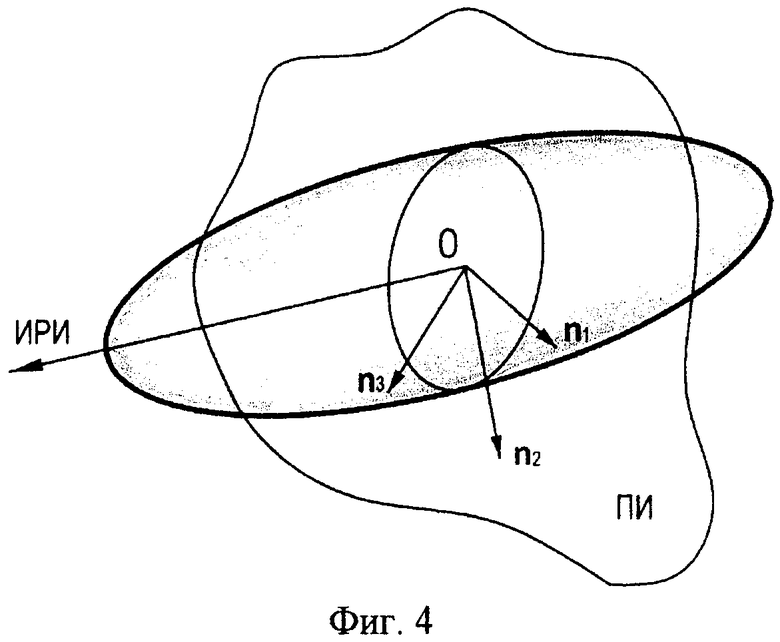
на фиг.4 - схема построения плоскости измерений;
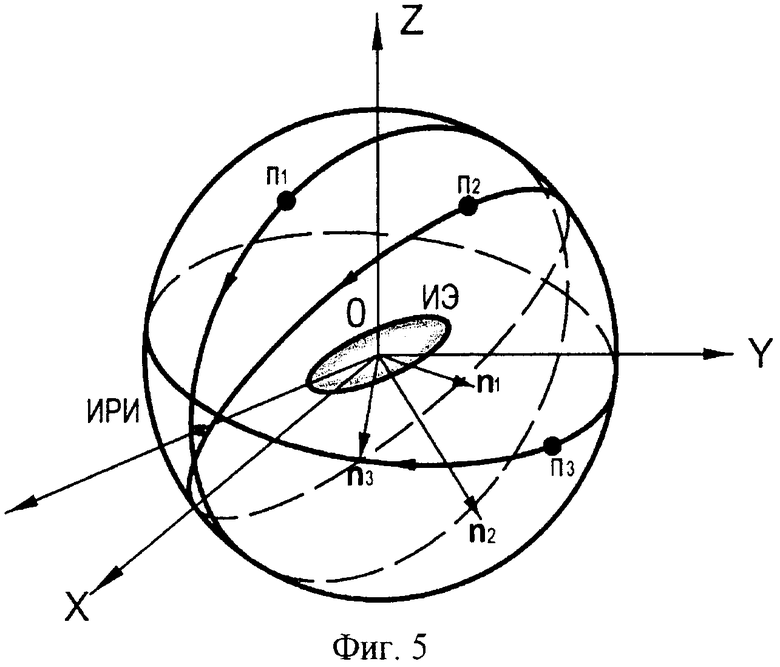
на фиг.5 - схема определения координат ИРИ.
Комплекс средств определения координат ИРИ (фиг.1), реализующий предлагаемый способ, содержит N разнесенных в пространстве постов 1 пеленгации (ПП 1), каждый из которых включает в себя последовательно соединенные антенную систему 2 (АС 2), приемник 3 (ПР 3), модуль 4 вычисления пеленга (МВП 4), кодек 5 и модуль 6 спутниковой связи (МСС 5). Второй выход антенной системы 2 соединен с вторым входом модуля 7 вычисления пеленга, а выход кодека 5 подключен к второму входу приемника 3. Комплекс содержит также пост 8 обработки информации (ПОИ 8), включающий в себя последовательно соединенные модуль 9 управления (МУ 9), кодер 10 команд (КК 10), модуль 11 приема и передачи данных (МППД 11), декодер 12 сигналов постов пеленгации (ДСПП 12), цифровой сигнальный процессор 13 (ЦСП 13) и модуль 14 картографирования и индикации (МКИ 14). Второй выход модуля 9 управления соединен с вторым входом модуля 14 картографирования и индикации, а второй выход декодера 12 сигналов постов пеленгации через модуль 15 весовой обработки (МВО 15) подключен к второму входу цифрового сигнального процессора 13 и к третьему входу модуля 14 картографирования и индикации. Вход модуля 9 управления является входом поста 8 обработки информации.
Способ определения координат ИРИ КВ диапазона реализуется следующим образом.
При радиомониторинге сигналов в дальней зоне приходится определять координаты ИРИ при удалении в сотни и тысячи километров от ПП (13, с.223). В этих условиях известные способы определения координат ИРИ по результатам его многопозиционного пеленгования, основанные на применении взвешенного усреднения координат точек пересечения пеленгов (засечек), требуют выполнения N*(N-1)/2 решений сферических треугольников, где N - количество пеленгаторов, образующих при суммировании пространственный многогранник возможных координат. Разрешение пространственного многогранника не обеспечивает требуемое быстродействие и точность измерений при местоопределении ИРИ и не позволяет определить точку наиболее вероятных координат ИРИ, необходимую для оценки возможности принятия мер реагирования и их достаточности.
При выполнении предлагаемого способа определения координат ИРИ КВ диапазона используется N ПП (стационарных или мобильных) с известными координатами
{Пi}, i=1, …, N.
С каждой позиции выполняется измерение пеленга на ИРИ
{Θi}, i=1, …, N
с погрешностями измерений (среднеквадратическими ошибками)
{σi}, i=1, …, N.
В ходе обработки результатов измерений должна быть найдена оценка координат ИРИ:

где Ф(v) - функционал обобщенной квадратичной невязки измерений:
ΔΘi(v)=Θi-fi(v),
fi(v)=azimuth(Пi,v) - пеленг с i-той позиции ПП на точку v.
В трехмерной декартовой системе координат с началом в центре геосферы единичного радиуса

где Т - символ транспонирования вектора [13, с.7], отклонение измеренного значения пеленга от истинного направления на точку V на геосфере может быть представлено в виде:
где ηi - единичный вектор нормали к большому кругу i-го пеленга;
δi - угловая дальность до ИРИ от i-ой позиции Пi (угловое разнесение точек при взгляде из центра геосферы).
При подстановке выражения (4) в функционал невязки (2):

где 
- информационная матрица местоопределения - симметричная 3×3 матрица ковариаций векторов измерения
минимизация функционала (5) с ограничением (3) сводится методом множителей Лагранжа к задаче безусловной минимизации обобщенного функционала Ф'(v):

где λ - множитель Лагранжа [11, с.335],
а после дифференцирования (8) и приравнивания производной к 0 - к задаче о собственных значениях матрицы А:

Таким образом, оценка координат (1) сводится к задаче о собственных значениях (9) для информационной матрицы (6), а алгоритм оценки координат - к следующей последовательности действий:
- для каждого полученного пеленга строят трехмерный вектор измерения ni как вектор нормали к плоскости, проходящей через центр Земли [14, с.87] и образующей линию пеленга при пересечении с геосферой;
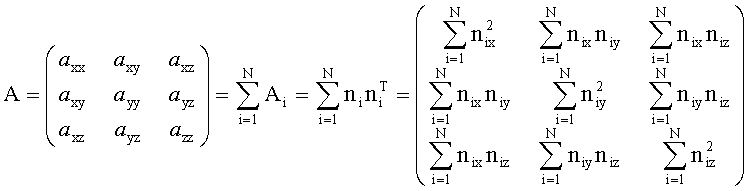
- для каждого измеренного пеленга находят матрицу Ai измерения размерностью 3×3 путем диадного [12, с.509] произведения вектора измерения на его транспонированное значение;
- суммируют все полученные матрицы измерений Ai;
- строят эллипсоид по задаваемым элементами суммарной матрицы коэффициентам уравнения второго порядка;
- определяют ориентацию эллипсоида в пространстве;
- находят подлежащие регистрации координаты ИРИ как координаты точки пересечения главной оси эллипсоида с поверхностью Земли.
Весь цикл определения координат ИРИ предлагаемым способом может быть реализован с помощью комплекса средств пеленгования ИРИ, функциональная схема которого приведена на фиг.1.
Команда на радиомониторинг заданного района в дальней зоне с модуля 9 управления через кодер 10 команд, причем кодированная команда управления содержит адрес ПП (условный номер) и координаты района пеленгования, и модуль 11 приема и передачи данных подается на модуль 6 спутниковой связи каждого поста 1 пеленгации. Команда декодируется кодеком 5 и поступает на приемник 3, обеспечивающий выделение сигналов ИРИ в широкой полосе КВ диапазона частот.
Сигнал fc ИРИ поступает на антенную систему 2 каждого поста 1
пеленгации и далее на информационный вход приемника 3. Прежде всего приемник 3 определяет электромагнитную доступность сигнала ИРИ для контроля. Вероятность правильного решения о наличии сигнала в полосе Δf определяется в соответствии с выражением [15, с.42]
Pправ=1-Fс+ш(h,ΔfTc),
где Рправ - вероятность правильного решения о наличии сигнала;
Fс+ш(h,ΔfTc)- интегральная функция условного распределения вероятностей процесса на входе решающего устройства приемника 3, соответствующая действию сигнала и шума на входе.
Посты 1 пеленгации, не обеспечивающие требуемого значения Рправ из дальнейшего процесса мониторинга данного ИРИ могут быть исключены.
Выделенный и продетектированный сигнал ИРИ с выхода приемника 3 поступает на модуль 4 вычисления пеленга одновременно с сигналом ориентации антенной системы 2. Полученное значение пеленга подается на кодек 5 и далее по информационной шине на модуль 6 спутниковой связи с командным постом 8. В модуле 6 сигнал пеленга переносится на частоту fПn.
Радиосигналы, содержащие кодированные значения пеленгов ИРИ, поступают на модуль 11 командного поста 8, демодулируется (снимается частота fПn) и подаются на декодер 12 сигналов ПП и далее - на модуль 15 весовой обработки.
Среднеквадратическая ошибка определения дальности при двух симметричных относительно биссектрисы угла ψ схождения пеленгов определяется выражением [16, с.175]:
где σ - среднеквадратическая погрешность измерения пеленга;
D - дальность от ПП до ИРИ.
При разных D величина возможной ошибки может увеличиваться.
Модуль 15 обеспечивает путем попарной обработки отбор (аналогично [10]) пеленгов для определения координат ИРИ, обеспечивающих минимальную среднеквадратическую ошибку. Значения этих пеленгов подаются на цифровой сигнальный процессор 13 для последующей обработки, в ходе которой определяются: векторы измерений ni, матрицы измерений Ai, информационная матрица A, строится информационный эллипсоид местоопределения, находятся вектор главной оси эллипсоида и координаты ИРИ.
С использованием представления вектора измерения ni в выбранной системе координат
матрица Ai измерений принимает вид:

а информационная матрица А местоопределения представляется в виде
Построение информационного эллипсоида местоопределения осуществляется с помощью цифрового сигнального процессора 13 следующим образом. Уравнение эллипсоида в векторном виде:
vTAv=1, где 
или в координатном виде:

Поворотом [17, с.91] системы координат (СК) при помощи матрицы преобразования координат

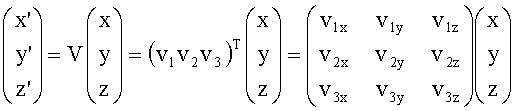
где v1, v2, v3 - базис новой СК,
уравнение эллипсоида может быть приведено к каноническому виду:

где а≥b≥с>0 - полуоси эллипсоида.
При этом оси новой СК совпадают с осями эллипсоида, а векторы v1, v2, v3 нового базиса являются собственными векторами матрицы A, то есть удовлетворяют уравнению (9). Для нахождения вектора главной оси v1, соответствующего оси ОХ' новой СК, находится меньшее из собственных значений матрицы A, которые являются корнями характеристического уравнения det(A-λI)=0, где det(·) - детерминант единичной матрицы [17, с.96], I - единичная матрица:
Уравнение для определения λ:

после раскрытия скобок и группировки слагаемых сводится к кубическому относительно λ уравнению

где ρ=-a xx-a yy-a zz;


Решение уравнения (14) дает корни λ1, λ2, λ3, соответствующие полуосям эллипсоида (12):



Результат подстановки λ1 в уравнение (9) дает координаты направляющего вектора v1 главной оси эллипсоида:

Отсюда координаты ИРИ:
долгота 
Выходной сигнал цифрового сигнального процессора 13 подается на модуль 14 картографирования и индикации, одновременно регистрирующий команду и использованные при определении координат пеленги (ПП). Результатом является точка наиболее вероятных координат ИРИ, а повышение быстродействия и точности дает возможность своевременно принимать меры действенного реагирования при обнаружении ИРИ в ходе радиомониторинга.
Графически преобразования в ходе использования предлагаемого способа иллюстрируются фиг.2-5. Фиг.2 приводит СК [14, с.87], адаптированную к предложенному циклу измерений. Фиг.3 показывает графически построение вектора измерения n, фиг.4 - построение плоскости измерений ПИ, фиг.5 - определение координат ИРИ. На фиг.2-5 приняты следующие обозначения: СП - северный полюс; Э - экватор; НМ -начальный меридиан; е - вектор; α - долгота; β - широта; М - меридиан, проходящий через точку е, (П); П - позиция пеленгатора; ЛП - линия пеленга; Θ - значение пеленга; ИЭ - информационный эллипсоид.
Управление постами 1 пеленгации может быть организовано аналогично, например, комплексу средств по патенту RU №2391619 [18] с использованием аппаратных средств, приведенных, например, в книге [19, с.17, 183].
Цифровой сигнальный процессор 13 может быть выполнен, например, на базе процессоров Texas Instruments TMS 320 С 6416/6713 и ПЛИС [20].
Таким образом, предлагаемый способ позволяет существенно повысить быстродействие определения координат ИРИ в дальней зоне радиомониторинга. Компьютерное моделирование показало эффективность и достаточность технических решений. В ходе экспериментальных исследований была показана возможность повышения быстродействия определения координат ИРИ в дальней зоне радиомониторинга в 3-6 раз, при этом точность местоопределения может быть повышена на 15-25%.
Источники информации
1. Головин В.В., Простое С.П. Системы и устройства коротковолновой радиосвязи. - М.: Горячая линия - Телеком, 2006.
2. Основы загоризонтной радиолокации. А. Алебастров и др. Под. ред. А.А. Колосова. - М.: Радиосвязь, 1984.
3. Караваев В.В., Сазонов В.В. Статическая теория пассивной локации. - М.: Радио и связь, 1987.
4. Рембовский A.M., Ашихмин А.В., Козьмин В.А. Радиомониторинг - задачи, методы, средства. - М.: Горячая линия - Телеком, 2010.
5. Куприянов А.И., Шустов Л.Н. Радиоэлектронная борьба. Основы теории. - М.: Вузовская книга, 2011.
6. Кукес И.С., Старик М.Е. Основы радиопеленгации. - М.: «Сов. радио», 1964.
7. Вартанесян В.А., Гойхман Э.Ш., Рогаткин М.И. Радиопеленгация. Военное издательство МО СССР, Москва, 1966.
8. Агафонников Ю.М., Лянной Б.Е., Лобачевская B.C. Влияние ионосферы при флуктуации азимутальных углов прихода радиоволн. Сборник статей «Исследование распространения коротких радиоволн». Изд. «Наука», Москва, 1973.
9. Пассивный метод определения местоположения РЛС. Патент США №4176377, МКИ G01S 5/02, 1979.
10. Способ определения координат источника радиоизлучений при амплитудно-фазовой пеленгации с борта летательного аппарата. Патент RU №2432580 C1, МПК G01S 1/08, приоритет 03.08.2010.
11. Сосулин Ю.Г. Теоретические основы радиолокации и радионавигации. - М.: Радио и связь, 1992.
12. Корн Г., Корн Т.. Справочник по математике для научных работников и инженеров. - М.: «Наука». Главная редакция физико-математической литературы, 1984.
13. Кондратьев B.C., Котов А.Ф., Марков Л.Н. Многопозиционные радиотехнические системы. - М.: Радио и связь, 1986.
14. Куштин И.Ф.. Геодезия. - М.: «Издательство ПРИОР», 2001.
15. Куприянов А.И., Петренко П.Б., Сычев М.П. Теоретические основы радиоэлектронной разведки. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2010.
16. Мельников Ю.П., Попов С.В. Радиотехническая разведка. Методы оценки эффективности местоопределения источников излучения. - М.: Радиотехника, 2008.
17. Александров П.С. Курс аналитической геометрии и линейной алгебры. - М.: Наука, Главная редакция физико-математической литературы, 1979.
18. Комплекс средств автоматизации системы управления боевыми средствами. Патент RU №2391619, МПК F41H 11/02, опубликован 10.06.2010.
19. Спилкер Дж. Цифровая спутниковая связь. - М.: Связь, 1979.
20. Потехин Д.С., Тарасов И.Е. Разработка систем цифровой обработки сигналов на базе ПЛИС. - М.: Горячая линия - Телеком, 2007.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ПРИ МНОГОКАНАЛЬНОЙ ФАЗОВОЙ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ КОРОТКОВОЛНОВОГО ДИАПАЗОНА | 2012 |
|
RU2527943C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2551355C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ ПРИ АМПЛИТУДНО-ФАЗОВОЙ ПЕЛЕНГАЦИИ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432580C1 |
| Способ одноэтапного адаптивного определения координат источников радиоизлучений | 2021 |
|
RU2768011C1 |
| Способ стробового отождествления сигналов с источниками радиоизлучения в многоцелевой обстановке | 2020 |
|
RU2752863C1 |
| СПОСОБ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ | 2014 |
|
RU2556699C1 |
| Способ повышения точности пеленгования источников радиоизлучения обнаружителем-пеленгатором с многошкальной антенной системой | 2019 |
|
RU2713235C1 |
| Угломерно-корреляционный способ определения местоположения наземных источников радиоизлучения | 2021 |
|
RU2764149C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2015 |
|
RU2603356C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2619915C1 |
Изобретение может быть использовано для определения координат источника радиоизлучений (ИРИ), в частности для определения координат ИРИ коротковолнового (KB) диапазона. Сущность изобретения заключается в том, что в известный способ определения координат ИРИ KB диапазона, включающий прием радиосигналов несколькими разнесенными в пространстве постами пеленгации, частотную селекцию, определение линий пеленгов, весовую обработку и регистрацию, введены операции, при выполнении которых для каждого полученного пеленга строят трехмерный вектор измерения как вектор нормали к плоскости, проходящей через центр Земли, пеленгационную позицию и образующей линию пеленга при пересечении с поверхностью Земли, для каждого измеренного пеленга находят матрицу измерения размерностью 3×3 путем диадного произведения вектора измерения на его транспонированное значение, суммируют все полученные матрицы измерений, строят эллипсоид по задаваемым элементами суммарной матрицы коэффициентам уравнения второго порядка, определяют ориентацию эллипсоида в пространстве и находят подлежащие регистрации координаты ИРИ как координаты точки пересечения главной оси эллипсоида с поверхностью Земли. Достигаемый технический результат - повышение быстродействия при определении координат ИРИ в ходе радиомониторинга в дальней зоне. 5 ил.
Способ определения координат источника радиоизлучений коротковолнового диапазона, включающий прием радиосигналов несколькими разнесенными в пространстве постами пеленгации, частотную селекцию, определение линий пеленгов, весовую обработку и регистрацию, отличающийся тем, что для каждого полученного пеленга строят трехмерный вектор измерения как вектор нормали к плоскости, проходящей через центр Земли, пеленгационную позицию и образующей линию пеленга при пересечении с поверхностью Земли, для каждого измеренного пеленга находят матрицу измерения размерностью 3×3 путем диадного произведения вектора измерения на его транспонированное значение, суммируют все полученные матрицы измерений, строят эллипсоид по задаваемым элементами суммарной матрицы коэффициентам уравнения второго порядка, определяют ориентацию эллипсоида в пространстве и находят подлежащие регистрации координаты источника радиоизлучений как координаты точки пересечения главной оси эллипсоида с поверхностью Земли.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ ПРИ АМПЛИТУДНО-ФАЗОВОЙ ПЕЛЕНГАЦИИ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432580C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАДИОПЕРЕДАТЧИКА МОБИЛЬНОЙ СТАНЦИЕЙ РАДИОКОНТРОЛЯ | 2006 |
|
RU2307372C1 |
| СПОСОБ ОДНОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285934C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2292560C1 |
| US 5719584 A, 17.02.1998 | |||
| EP 1601989 A1, 07.12.2005 | |||
| US 6505122 B1, 07.01.2003 | |||
| WO 2004011955 A2, 05.02.2004. | |||

