Изобретение относится к области радионавигации, а именно к способам определения координат потребителя с использованием спутниковых радионавигационных систем (СРНС) ГЛОНАСС или GPS. Изобретение может быть использовано в приемниках СРНС различного назначения: на авиационном, железнодорожном, автомобильном транспорте, в строительстве, геодезии и в других областях.
Основным документом, устанавливающим взаимоотношения потребителей со спутниковой радионавигационной системой, является Интерфейсный контрольный документ GPS [Interface Control Document GPS-ICD GPS - 200C - 002, 1997] [1].
Известен способ определения координат потребителя, включающий прием сигналов от навигационного космического аппарата (НКА), их усиление и корреляцию, отслеживание кодов и частот, вычисление псевдодальностей ПД и псевдоскоростей ПС, коррекцию ионосферных и тропосферных ошибок по стандартным моделям и вычисление координат потребителя. При этом коррекцию ионосферной ошибки проводят с помощью стандартного алгоритма, использующего модель ионосферных ошибок - модель Клобучара, официально рекомендованную Интерфейсным контрольным документом GPS.
Координаты потребителя в любом месте приземного пространства и в любой момент времени определяют посредством их расчета по известным псевдодальностям (ПД) - расстояниям от потребителя до навигационных космических аппаратов (НКА) с учетом различных типов задержек сигнала. Псевдодальности рассчитывают по временным задержкам Тi сигнала на трассе «НКА-потребитель» и известной скорости распространения радиоволн. Задержки Тi сигнала измеряют в результате сопоставления принятых псевдослучайных кодов и генерируемых в приемнике копий этих кодов с учетом известных моментов излучения и приема сигналов НКА. Для определения координат проводят компенсацию различных типов задержек сигнала, из которых одной из основных является ионосферная задержка. Основные принципы навигационных определений изображены на Фиг.1 [Соловьев Ю.А. Спутниковая навигация и ее приложения / Ю.А.Соловьев. - М.: Эко-Трендз, 2003 - 326 с.] [2].
Основной проблемой при компенсации ионосферной задержки является то, что ее значение очень широко меняется в зависимости от региона, в котором расположен приемник, от времени суток и года, от солнечной и геомагнитной активности. Для учета ионосферных задержек необходимо применять постоянный мониторинг состояния ионосферы, используя все доступные методы, включая наблюдение за солнечной активностью, прямые и косвенные методы измерения концентрации свободных электронов в ионосфере, а также аппаратное измерение задержки сигнала на различных станциях слежения. На основании собранных данных вычисляют коэффициенты, позволяющие потребителю смоделировать в приемнике условия распространения сигнала в атмосфере. Осуществление мониторинга ионосферной задержки в различных регионах Земли в настоящее время неосуществимо.
Известные способы определения и учета ионосферной поправки, определяемой для компенсации ионосферной задержки, например метод моделирования трассы, широко применяются в одночастотных приемниках. Точность указанного выше метода ограничена из-за того, что коэффициенты, входящие в расчетное соотношение и зависящие, например, от концентрации свободных электронов в ионосфере, известны лишь приблизительно. Если использовать значение так называемых коэффициентов модели ионосферы Клобучара α, β, передаваемых в навигационном сообщении, то ионосферную погрешность удается уменьшить примерно лишь наполовину при условии приемлемого объема вычислений [2].
Недостатком известного способа определения координат потребителя с помощью известных в мире стандартных одночастотных приемников является низкий процент компенсации ионосферной ошибки (до 50%), обусловленный относительно малой точностью стандартного алгоритма, использующего ионосферную уточненную модель Клобучара [Klobuchar J.A. Ionospheric time - delay algoritm for single-frequency GPS users // IEEE Transactions on Aerospace and Electronics System - 1986. - V.23.- №3] [3].
Известно устройство, реализующее стандартный способ определения координат, которое работает как навигационный приемник системы ГЛОНАСС/GPS. Стандартный радионавигационный приемник содержит соединенные последовательно блок получения первичных данных БППД, блок решения навигационных задач БРНЗ и блок отображения информации БОИ, на дисплей которого выводятся абсолютные значения координат потребителя [Яценков B.C. Основы спутниковой навигации / B.C.Яценков - М.: Горячая линия - Телеком, 2005. - 272 с.] [4].
Назначением блока решения навигационных задач (БРНЗ) является расчет координат и скорости потребителя по данным из блока получения первичных данных (БППД). Определение производят при помощи программного обеспечения приемника на основе решения навигационной задачи в виде нахождения пространственных координат с предварительным расчетом ионосферной поправки. Поэтому блок решения навигационных задач (БРНЗ) содержит встроенные модуль расчета ионосферных поправок (МРИП) и блок вычисления абсолютных координат (БВК), не упомянутые напрямую в указанном выше источнике информации.
Блок-схема стандартного навигационного приемника изображена на Фиг.2. Схема содержит следующие позиции.
1 - Блок получения первичных данных БППД
2 - Блок решения навигационных задач БРНЗ
3 - Блок отображения информации БОИ
4 - Модуль расчета ионосферных поправок МРИП
5 - Блок вычисления координат БВК
6 - Модель Клобучара МК
Работает известный приемник следующим образом.
На вход блока получения первичных данных (БППД) 1 поступает от НКА навигационный сигнал, который подвергается первичной цифровой обработке и передается в блок решения навигационных задач (БРНЗ) 2 в необходимом оцифрованном виде. БРНЗ 2 решает навигационную задачу, используя модуль расчета ионосферных поправок МРИП 4, и выводит на дисплей блока отображения информации БОИ 3 координаты потребителя, рассчитанные БВК 5. Модуль расчета ионосферных поправок МРИП 4 работает на основе стандартного алгоритма, использующего, как указывалось ранее, ионосферную модель Клобучара МК, обеспечивающую в среднем устранение 50% величины ионосферной ошибки.
Недостатком известных в мире стандартных одночастотных приемников является невысокая точность позиционирования приемника из-за применения в нем стандартного блока решения навигационных задач, в котором модуль расчета ионосферных поправок МРИП использует модель Клобучара.
Техническим результатом предлагаемого способа определения координат потребителя и устройства для его осуществления является повышение точности определения координат потребителя за счет устранения ионосферных ошибок, что и приводит к повышению точности позиционирования любого объекта с использованием спутниковых радионавигационных систем.
Технический результат при осуществлении способа достигают следующим образом.
В заявленном способе, включающем прием сигналов от навигационных космических аппаратов, их усиление и корреляцию, отслеживание кодов частот, вычисление псевдодальностей (ПД) и псевдоскоростей (ПС), коррекцию ионосферных ошибок с помощью ионосферной модели и вычисление координат потребителя, причем при проведении коррекции ионосферных ошибок в качестве ионосферной модели используют эмпирическую модель необходимого ионосферного параметра (МНИП), исходя из известных параметров, таких как географические координаты и время, и дополнительного параметра - индекса солнечной активности при однократной обработке массива значений вертикальных ПЭС (полного электронного содержания) в ионосфере, выборе соответствующих числовых значений среди массивов значений вертикальных ПЭС, поставляемых различными центрами, с последующим сжатием, фильтрацией полученного массива и формированием входного числового массива данных для последующего расчета ионосферных поправок и абсолютных значений координат потребителя.
При однократной обработке массива значений вертикальных ПЭС в ионосфере используют входные данные из IONEX-файлов. Сжатие и фильтрацию массивов значений вертикальных ПЭС проводят методом разложения экспериментальных данных по естественным ортогональным функциям.
Индекс солнечной активности может быть получен из долгосрочного прогноза либо от навигационной системы.
Описание разработанной авторами эмпирической модели необходимого ионосферного параметра приведено в Приложении 1.
Технический результат с использованием одночастотного приемника получают следующим образом.
В одночастотном навигационном приемнике системы ГЛОНАСС/GPS, содержащем последовательно соединенные блок получения первичных данных, блок решения навигационных задач с модулем расчета ионосферных поправок и блоком вычисления координат, соединенным с блоком отображения информации, причем модуль расчета ионосферных поправок использует эмпирическую модель необходимого ионосферного параметра (МНИП), второй вход которой служит для ввода данных об индексе солнечной активности ИСА, а первый вход соединен с выходом блока получения первичных данных, а выход указанной выше модели через вычислитель корректирующих коэффициентов соединен с блоком вычисления координат (БВК), а ее третий вход соединен с выходом блока числового массива данных (БЧМД), информационный вход которого служит для приема числовой информации, однократно подготовленной дополнительно созданным блоком формирования числовых данных (БФЧД), содержащим блок сжатия и фильтрации соответствующего числового массива (БСФД) и соединенный с ним блок предварительного анализа данных (БПАД), вход которого служит для ввода данных из IONEX-файлов.
Заявляемый способ и устройство для его осуществления поясняют приводимые схемы.
Фиг.1 - показаны известные основные принципы навигационных определений в соответствии с источником [2].
Фиг.2 - приведена блок-схема стандартного навигационного приемника.
Фиг.3 - заявляемая блок-схема одночастотного навигационного приемника для осуществления предлагаемого способа.
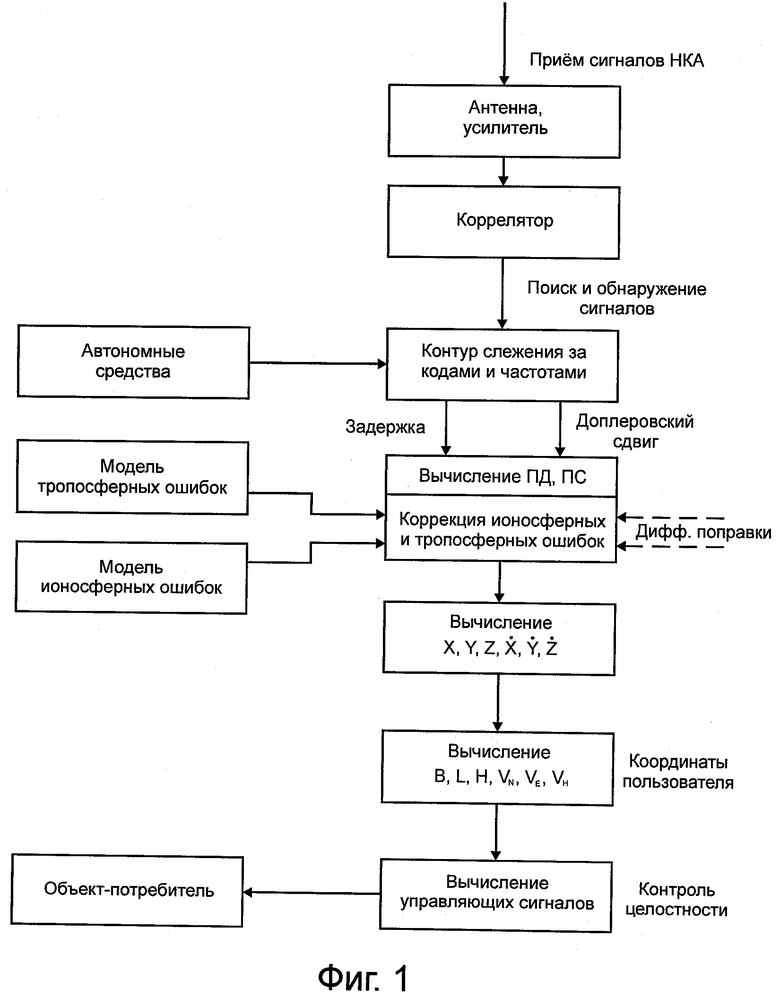
Фиг.4 - гистограмма частот появления ошибки со знаком.
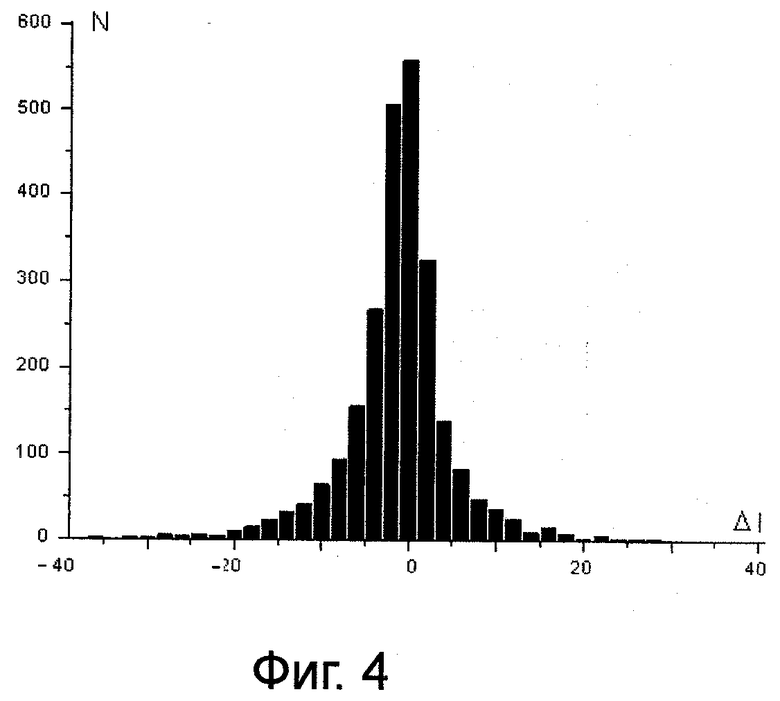
Фиг.5 - гистограмма частот появления абсолютной ошибки.
Подробное описание блок-схемы, приведенной на Фиг.2 с пояснением указанных позиций, дано выше на с.4.
Показанная на Фиг.3 схема одночастотного приемника содержит три основных соединенных последовательно блока: 1 - блок получения первичных данных (БППД), 2 - блок решения навигационных задач (БРНЗ) и 3 - блок отображения информации (БОИ). Блок 2 (БРНЗ), в свою очередь, содержит модуль расчета ионосферных поправок (МРИП) 4 и блок вычисления координат (БВК) 5, соединенный с блоком отображения информации (БОИ) 3. Модуль расчета ионосферного параметра (МРИП) 4 при расчете ионосферных поправок использует модель необходимого ионосферного параметра (МНИП) 7 со встроенным вычислителем корректирующих коэффициентов (ВЧ) 12, выход которого соединен с блоком вычисления координат (БВК) 5. При этом первый вход МНИП 7 соединен с выходом блока получения первичных данных (БППД) 1, второй вход служит для ввода информации об индексе солнечной активности (ИСА), а третий вход соединен с блоком числового массива данных (БЧМД) 8. Информационный вход БЧМД 8 служит для ввода числовой информации от блока формирования числовых данных (БФЧД) 9, содержащего последовательно соединенные блок предварительного анализа данных (БПАД) 10 и блок сжатия и фильтрации выбранного числового массива данных (БСФД) 11.
Блок получения первичных данных (БППД) 1 представляет собой аналого-цифровой комплекс, радиотехническая часть которого обеспечивает прием сигналов от спутников навигационной системы, их первичную цифровую обработку и передачу необходимых оцифрованных данных в блок решения навигационных задач (БРНЗ) 2. Блок получения первичных данных БППД 1 сохранен в актуальном для существующих приемников виде, также как и третья составная часть приемника - блок отображения информации БОИ 3.
Авторами разработан новый модуль расчета ионосферных поправок (МРИП) 4, встроенный в блок решения навигационных задач (БРНЗ) 2 и использующий эмпирическую модель необходимого ионосферного параметра (МНИП) 7. Отличительной особенностью предлагаемого приемника является модификация блока решения навигационных задач (БРНЗ) 2, вызванная обновлением программного обеспечения в модуле расчета ионосферных поправок (МРИП) 4, которое может быть произведено непосредственно производителем приемника.
Работа одночастотного приемника, функционирующего в системе ГЛОНАСС/GPS, с реализацией заявленного способа происходит следующим образом.
На вход блока получения первичных данных 1 поступает от НКА навигационный сигнал, который подвергается первичной цифровой обработке и передается в блок решения навигационных задач (БРНЗ) 2 в необходимом оцифрованном виде. БРНЗ 2 решает навигационную задачу и выводит на дисплей блока отображения информации (БОИ) 3 абсолютные значения координат. Назначение БРНЗ 2 - расчет координат и скорости потребителя по данным, полученным от БППД 1. Расчет производится программным обеспечением приемника на основе решения навигационной задачи. Уравнения, описывающие навигационную задачу, содержат коэффициенты, зависящие от ионосферной поправки ко времени распространения навигационных сигналов. Данная ионосферная поправка в наибольшей степени влияет на ошибки позиционирования, поэтому ее корректный учет обеспечивает снижение таких ошибок. Для этого в одночастотных приемниках применяется модуль расчета ионосферных поправок (МРИП) 4. В предлагаемом приемнике в модуле МРИП 4 применяется новый алгоритм, использующий разработанную авторами глобальную эмпирическую модель необходимого ионосферного параметра (МНИП) 7.
Входными параметрами для эмпирической модели МНИЛ 7 являются не только стандартные (географические координаты и время), получаемые от навигационного космического аппарата НКА и подвергшиеся специальной числовой обработке в блоке получения первичных данных (БППД) 1, но и дополнительный входной параметр - индекс солнечной активности ИСА. Значения индекса ИСА могут быть получены один раз в сутки либо от самой спутниковой радионавигационной системы (СРНС), либо из долгосрочного прогноза.
Стандартные параметры от БППД 1 поступают на первый вход модели МНИП 7, а информация об индексе солнечной активности (ИСА) поступает на ее второй вход. Исходными данными для модели МНИП 7 являются массивы значений вертикальных ПЭС в ионосфере, обработанные специальным образом и поступающие на третий вход МНИП 7 от блока числового массива данных (БЧМД) 8. Информационный вход БЧМД 8 служит для приема однократно подготовленной числовой информации блоком формирования числовых данных (БФЧД) 9.
Блок формирования числовых данных (БФЧД) 9 реализован вне приемника (на персональном компьютере) и все операции с числовой информацией выполняют один раз. В результате работы блока БФЧД 9 заполняют блок числового массива данных (БЧМД) 8 для последующей разработки модели необходимого ионосферного параметра (МНИП) 7.
Работа блока формирования числовых данных БФЧД 9 заключается в следующем. Исходными данными для работы являются массивы значений вертикального полного электронного содержания (ПЭС) в ионосфере, поставляемые в открытом доступе рядом центров обработки GPS-информации за более чем десятилетний период в виде так называемых IONEX-файлов. На первом этапе в блоке предварительного анализа данных БПАД 10, куда поступают IONEX-файлы, производят выбор наиболее адекватных числовых значений вертикального ПЭС среди массивов, поставляемых различными центрами. На втором этапе выбранный числовой массив подвергают процедуре сжатия и фильтрации в блоке БСФД 11 с помощью специально разработанной программы на основе метода разложения экспериментальных данных по естественным ортогональным функциям, ранее в этих целях не применявшегося. В результате работы блока сжатия и фильтрации данных БСФД 11 формируют блок числового массива данных БЧМД 8. Как уже указывалось, подготовку БЧМД 8 выполняют однократно, однако по мере поступления новых данных по ПЭС, которые будут появляться в очередном цикле солнечной активности, БЧМД 8 может быть модифицирован с целью дальнейшего улучшения точности позиционирования одночастотного навигационного приемника.
На третьем этапе модель необходимого ионосферного параметра МНИП 7 на основе данных, полученных от БЧМД 8 и БППД 1, с учетом информации об индексе солнечной активности (ИСА) рассчитывают корректирующие коэффициенты с помощью вычислителя 12. Указанные корректирующие коэффициенты являются ионосферными поправками. Эти поправки передаются в БРНЗ 2, который с помощью блока вычисления координат (БВК) 5 производит расчет абсолютных значений координат и скорости потребителя и выводит их на дисплей БОИ 3.
На конечном этапе решения навигационной задачи псевдодальномерным способом координаты потребителя X, Y, Z определяются из решения системы навигационных уравнений типа

где Pi - псевдодальность до i-го спутника,
Xi,Yi, Zi - координаты i-го спутника,
Т - сдвиг часов приемника потребителя, приведенный к размерности длины умножением на скорость света,
Ti - сдвиг часов i-го спутника, также приведенный к размерности длины умножением на скорость света,
Ii - ионосферная поправка к псевдодальности i-го спутника,
Ri - прочие поправки.
В последнее соотношение входят измеряемые и рассчитываемые величины и неизвестные координаты, сдвиг часов приемника, подлежащие определению. Измеряемые и рассчитываемые величины известны с той или иной степенью точности, т.е. содержат погрешности. Погрешностями являются и прочие поправки. Известно, что ионосферная поправка является среди всех остальных одной из наиболее значимых. Именно по этой причине ее уточненное модельное прогнозирование, предложенное авторами, позволяет существенно уточнить и определение координат.
Применение нового алгоритма, использующего разработанную авторами эмпирическую модель необходимого ионосферного параметра (МНИП) - полного электронного содержания ПЭС, позволяет устранить большую (до 80%) часть ионосферной погрешности и тем самым повысить точность позиционирования любого объекта в СРНС. Известный стандартный способ обеспечивает компенсацию ионосферных ошибок только на 50%. Иными словами, если модель Клобучара уменьшает ионосферную погрешность в среднем в 2 раза, то предлагаемый способ, использующий эмпирическую модель необходимого ионосферного параметра (МНИП) уменьшает эту погрешность в 5 раз.
Возможность осуществления предлагаемого способа и его эффективность подтверждают результаты проведенного тестирования. Методика тестирования заключалась в расчетах основного параметра, определяющего ионосферную погрешность - вертикального ПЭС и в сопоставлении расчетов с экспериментальными данными, т.е. данными в IONEX-файлах. Анализировался 12-летний период с 1998 по 2010 год. В каждом году выбиралось 4 дня (весеннее и осеннее равноденствие, летнее и зимнее солнцестояние). Для каждого дня в момент времени 04 UT и 4 значений долгот (0, 90, 180, 270 градусов) рассчитывались широтные ходы ПЭС от 70 градусов северной широты до 50 градусов южной широты с шагом по широте, равным 10 градусам. Таким образом, обрабатывался массив из N=2496 пар измеренных и модельных числовых значений. Такая выборка является репрезентативной вследствие достаточно большого объема и случайного характера отбора ее элементов. Рассматривая тестирование как процесс статистических испытаний можно оценить возможную ошибку получения расчетных значений величиной 
В целом предлагаемая модель дает средний модуль относительной ошибки вертикального ПЭС, равный 19.6%. Эта оценка полезна для сопоставления со средней относительной ошибкой по модели Клобучара, которая оценивается, как указывалось выше, примерно равной 50%. Средняя абсолютная ошибка в определении ПЭС по описываемой модели составляет величину 4 TECU (около 0.65 м в пересчете на ошибку дальности). При представлении в терминах среднеквадратичного отклонения (СКО) ошибка равна 6.2 TECU. Последнее значение целесообразно сопоставить со специфическим среднеквадратичным отклонением от нуля для самих вертикальных ПЭС, полученных из IONEX-файлов, которое составляет 28.8 TECU.
Наибольший вклад в относительную ошибку дают тесты для малых ПЭС, соответствующих ночным условиям и низкой солнечной активности. В этой связи весь массив тестов был разделен на условно малые ПЭС, меньшие 15 TECU, и условно большие ПЭС (большие 15 TECU). В нижнем диапазоне относительная ошибка довольно велика - 27%, но абсолютная ошибка, которая, собственно, и имеет практическое значение, составляет 2 TECU (около 0.3 м в пересчете на ошибку дальности). Среднеквадратичное отклонение ошибки (СКО) равно 2.7 TECU. В верхнем диапазоне относительная ошибка равна 18%, абсолютная - 6.3 TECU (около 0.9 м) со СКО, равным 8.4 TECU.
Для более строгого представления качества коррекции ионосферной ошибки результаты тестирования анализировались на основе функции плотности распределения ошибки. На Фиг. 4 и 5 представлены гистограммы частот появления ошибки со знаком (4) и абсолютной ошибки (5). Здесь по горизонтальной оси отложены значения ошибки I в единицах TECU. По вертикальной оси N дано количество тестов, попавших в соответствующий диапазон шириной 1 TECU, то есть величина, пропорциональная оценке вероятности данного значения ошибки. Первая гистограмма свидетельствует о том, что остаточная (после коррекции) ошибка распределена по закону, близкому к нормальному с близким к нулю средним значением. Из анализа данных для второй гистограммы следует важная оценка. С вероятностью 0.95 остаточная ошибка абсолютного значения ионосферной поправки в вертикальном ПЭС не превышает 13 TECU (около 2.1 м). В аналогичном представлении некорректированная измеренная ионосферная ошибка по уровню вероятности 0.95 лежит в пределах до 63 TECU (около 10.3 м). Таким образом, можно констатировать, что предлагаемый способ обеспечивает пятикратное уменьшение ошибки определения вертикального ПЭС.
Полномасштабное тестирование предлагаемого способа показало его работоспособность и продемонстрировало возможность существенного повышения точности позиционирования одночастотного навигационного приемника.
Предлагаемая модификация одночастотного приемника не требует больших материальных затрат.
Преимуществами предлагаемого авторами способа и устройства его реализующего являются:
1. Высокая степень устранения ионосферной ошибки (до 80% в сравнении с 50% у единственного аналога - модели Клобучара);
2. Необходимость ввода только одного входного параметра - индекса солнечной активности ИСА, значения которого можно получать один раз в сутки либо от самой СРНС, либо из долгосрочного прогноза;
3. Использование при разработке МНИП измерений полного электронного содержания (ПЭС), содержащихся в IONEX-файлах, поставляемых мировыми центрами обработки GPS-информации.
Способ и устройство позволяют значительно повысить точность позиционирования любого объекта.
Источники информации
1. Интерфейсный контрольный документ GPS [Interface Control Document GPS- ICD GPS - 200C - 002, 1997].
2. Соловьев Ю.А. Спутниковая навигация и ее приложения / Ю.А.Соловьев. - М.: Эко-Трендз, 2003. - 326 с.
3. Яценков B.C. Основы спутниковой навигации / B.C.Яценков - М.: Горячая линия - Телеком, 2005. - 272 с.
4. Klobuchar J.A. Ionospheric time - delay algoritm for single-frequency GPS users // IEEE Transactions on Aerospace and Electronics System. - V.23. - №3. - 1986.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЭПИЦЕНТРАЛЬНОЙ ЗОНЫ ИСТОЧНИКА И СКОРОСТИ РАСПРОСТРАНЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ИОНОСФЕРНЫХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2560525C1 |
| СПОСОБ ЗОНДИРОВАНИЯ ИОНОСФЕРЫ, ТРОПОСФЕРЫ, ГЕОДВИЖЕНИЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2502080C2 |
| СПОСОБ УСТРАНЕНИЯ ВЛИЯНИЯ ТРОПОСФЕРНЫХ И ИОНОСФЕРНЫХ ОШИБОК ИЗМЕРЕНИЯ В ОДНОЧАСТОТНЫХ ПРИЁМНИКАХ СПУТНИКОВОЙ НАВИГАЦИИ | 2002 |
|
RU2237257C2 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| СПОСОБ И СИСТЕМА НАВИГАЦИИ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ, ИСПОЛЬЗУЮЩИЕ ТРИ НЕСУЩИХ РАДИОСИГНАЛА, ПЕРЕДАВАЕМЫХ СПУТНИКОМ, И ИОНОСФЕРНЫЕ КОРРЕКЦИИ | 2003 |
|
RU2318222C2 |
| СПОСОБ ОДНОЧАСТОТНОГО ОПРЕДЕЛЕНИЯ ЗАДЕРЖКИ СИГНАЛОВ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ В ИОНОСФЕРЕ | 2006 |
|
RU2313103C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2013 |
|
RU2560094C2 |
| СПОСОБ И СИСТЕМА ПОВЫШЕНИЯ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОЛЬЗОВАТЕЛЕЙ ГЛОБАЛЬНЫХ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ РАЗМЕТКИ УЧАСТКОВ УЛИЧНО-ДОРОЖНОЙ СЕТИ | 2016 |
|
RU2633093C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАКСИМАЛЬНО ПРИМЕНИМОЙ ЧАСТОТЫ ДЛЯ ИОНОСФЕРНОЙ РАДИОСВЯЗИ | 2012 |
|
RU2516239C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ АВРОРАЛЬНОГО ОВАЛА И СОСТОЯНИЯ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2015 |
|
RU2601387C1 |

Изобретение относится к области радионавигации, а именно к способам определения координат с использованием спутниковых радионавигационных систем (СРНС) ГЛОНАСС и/или GPS и может быть использовано в приемниках СРНС различного назначения. Технический результат заключается в повышении точности определения координат потребителя за счет устранения ионосферных ошибок. Для этого способ включает прием сигналов от навигационного космического аппарата (НКА), их усиление и корреляцию, отслеживание кодов и частот, вычисление псевдодальностей ПД и псевдоскоростей ПС, коррекцию ионосферных ошибок и вычисление координат потребителя. Величину ионосферной поправки определяют с помощью эмпирической модели необходимого ионосферного параметра, исходя из известных параметров (географические координаты и время) и дополнительного параметра - индекса солнечной активности при однократной обработке массива значений вертикальных ПЭС в ионосфере. Осуществляют выбор соответствующих числовых значений среди массивов значений вертикальных ПЭС, поставляемых различными центрами, с последующим сжатием, фильтрацией полученного массива и формированием входного числового массива данных для последующего расчета ионосферных поправок и абсолютных значений координат потребителя. При однократной обработке массива значений вертикальных ПЭС в ионосфере для создания модели ПЭС используют входные данные из IONEX-файлов. 2 н. и 2 з.п. ф-лы, 5 ил.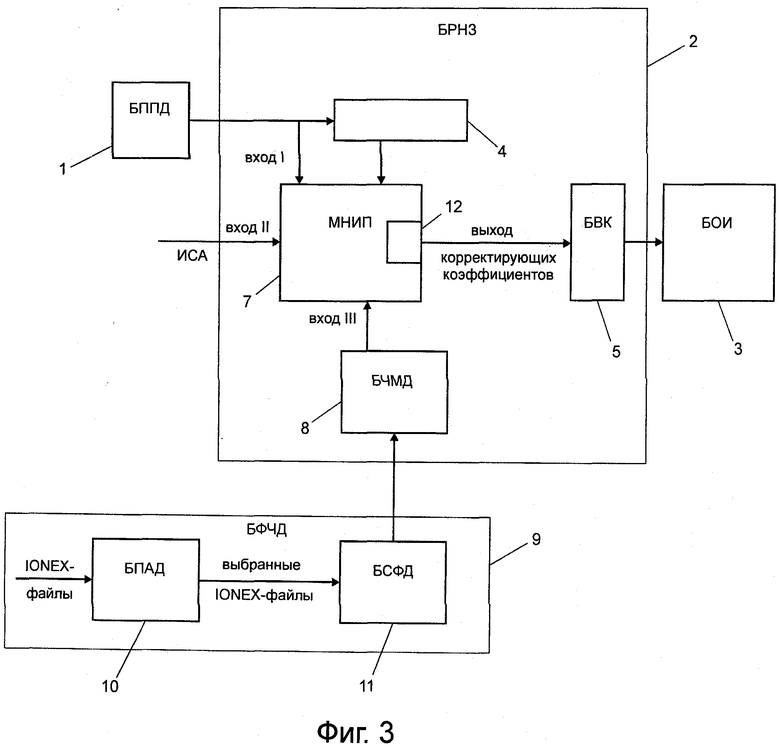
1. Способ определения координат потребителя в системе ГЛОНАСС/GPS, включающий прием сигналов от навигационных космических аппаратов, их усиление и корреляцию, отслеживание кодов и частот, вычисление псевдодальностей и псевдоскоростей, коррекцию ионосферных ошибок с помощью ионосферной модели и вычисление координат потребителя, отличающийся тем, что при проведении коррекции ионосферных ошибок в качестве ионосферной модели используют эмпирическую модель необходимого ионосферного параметра, исходя из известных параметров, таких как географические координаты и время, и дополнительного параметра - индекса солнечной активности при однократной обработке массива значений вертикальных ПЭС в ионосфере, выборе соответствующих числовых значений среди массивов значений вертикальных ПЭС, поставляемых различными центрами, с последующим сжатием, фильтрацией полученного массива и формированием входного числового массива данных для последующего расчета ионосферных поправок и абсолютных значений координат потребителя.
2. Способ определения координат потребителя по п.1, отличающийся тем, что при однократной обработке массива значений вертикальных ПЭС в ионосфере для создания модели ПЭС используют входные данные из IONEX-файлов.
3. Способ определения координат потребителя по п.1, отличающийся тем, что сжатие и фильтрацию массивов значений вертикальных ПЭС проводят методом разложения экспериментальных данных по естественным ортогональным функциям.
4. Одночастотный навигационный приемник системы ГЛОНАСС/GPS, содержащий последовательно соединенные блок получения первичных данных, блок решения навигационных задач с модулем расчета ионосферных поправок и блоком вычисления координат, соединенного с блоком отображения информации, отличающийся тем, что модуль расчета ионосферных поправок использует эмпирическую модель необходимого ионосферного параметра, второй вход которой служит для ввода данных об индексе солнечной активности ИСА, а первый вход соединен с выходом блока получения первичных данных, а выход указанной выше модели через вычислитель корректирующих коэффициентов соединен с блоком вычисления координат, а её третий вход соединен с блоком числового массива данных, информационный вход которого служит для приема числовой информации, однократно подготовленной дополнительно созданным блоком формирования числовых данных, содержащего блок сжатия и фильтрации соответствующего числового массива и соединенного с ним блока предварительного анализа данных, вход которого служит для ввода данных из IONEX-файлов.
| СПОСОБ И СИСТЕМА НАВИГАЦИИ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ, ИСПОЛЬЗУЮЩИЕ ТРИ НЕСУЩИХ РАДИОСИГНАЛА, ПЕРЕДАВАЕМЫХ СПУТНИКОМ, И ИОНОСФЕРНЫЕ КОРРЕКЦИИ | 2003 |
|
RU2318222C2 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ИОНОСФЕРНОЙ ОШИБКИ ДАЛЬНОСТЕЙ ПО ДВУХЧАСТОТНЫМ ИЗМЕРЕНИЯМ | 2005 |
|
RU2333507C2 |
| СПОСОБ ОДНОЧАСТОТНОГО ОПРЕДЕЛЕНИЯ ЗАДЕРЖКИ СИГНАЛОВ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ В ИОНОСФЕРЕ | 2006 |
|
RU2313103C1 |
| EP 1336866 A2, 20.08.2003 | |||
| EP 2056121 A1, 06.05.2009 | |||
| Способ разведки земной формации,пересеченной буровой скважиной,и устройство для его осуществления | 1976 |
|
SU1207405A3 |

