Настоящее изобретение относится, в основном, к технологиям, связанным с позиционированием и навигацией с использованием спутников, и, в частности, к разрешению плавающей неоднозначности несущей в региональной, широкозонной или глобальной системе позиционирования и/или навигации по фазе несущей.
Уровень техники
Глобальная система позиционирования (ГСП) использует спутники в космосе для определения местоположения объектов на земле. В ГСП сигналы от спутников поступают на приемник ГСП и используются для определения положения приемника ГСП. В настоящее время два типа измерений ГСП, соответствующих каждому каналу коррелятора с захваченным сигналом спутника ГСП, доступны для гражданских приемников ГСП. Два типа измерений ГСП представляют собой псевдодальность и интегрированную фазу несущей для двух сигналов L1 и L2 несущей с частотами 1,5754 ГГц и 1,2276 ГГц или длинами волн 0,1903 м и 0,2442 м, соответственно. Измерение псевдодальности (или измерение кода) представляет собой основную функцию наблюдения ГСП, которую все типы приемников ГСП могут выполнять. Оно использует С/А-коды или Р-коды, модулируемые на сигналы несущей. При измерении регистрируется истинное время, затрачиваемое для прохождения соответствующего кода от спутника к приемнику, т.е. время, в которое сигнал поступает на приемник в соответствии с часами приемника, минус время, когда сигнал был передан со спутника в соответствии с часами спутника. Измерение фазы несущей осуществляется посредством интегрирования восстановленной несущей сигнала, когда он поступает на приемник. Таким образом, измерение фазы несущей также представляет собой меру разности времени прохождения сигнала, определяемую временем, когда сигнал был передан со спутника в соответствии с часами спутника, и временем, когда он поступает на приемник в соответствии с часами приемника. Однако, так как первоначальное количество целых периодов при прохождении между спутником и приемником, когда приемник начинает отслеживать фазу несущей сигнала, обычно неизвестно, разность времени прохождения сигнала может быть с ошибкой на кратное число периодов несущей, т.е. существует полнопериодная неоднозначность при измерении фазы несущей.
При доступных измерениях ГСП дальность или расстояние между приемником ГСП и каждым из множества спутников вычисляется посредством умножения времени прохождения сигнала на скорость света. Эти дальности обычно упоминаются как псевдодальности (ложные дальности), так как часы приемника обычно имеют значительную временную ошибку, которая вызывает общее смещение измеряемой дальности. Это общее смещение из-за ошибки часов приемника определяется вместе с координатами положения приемника как часть нормальных навигационных вычислений. Различные другие факторы также могут приводить к ошибкам или шуму в вычисленной дальности, включая эфемеридную ошибку, временную ошибку часов спутника, атмосферные влияния, шум приемника и ошибку многолучевого распространения. При автономной навигации ГСП, когда пользователь с приемником ГСП получает код и/или дальности по фазе несущей относительно множества видимых спутников без обращения к какой-либо опорной станции, пользователь очень ограничен в путях снижения ошибок или шумов в дальностях.
Чтобы устранить или снизить эти ошибки, дифференциальные операции обычно используются в приложениях ГСП. Функционирование дифференциальной ГСП (ДГСП) обычно использует базовый опорный приемник ГСП, пользовательский (или навигационный) приемник ГСП и линию связи между пользователем и опорными приемниками. Опорный приемник размещается в известном расположении, и известное положение используется для генерирования поправок, связанных с некоторыми или всеми из вышеупомянутых факторов ошибок. Поправки подаются на пользовательский приемник, и пользовательский приемник затем использует поправки для соответствующей коррекции его вычисленного положения. Поправки могут быть в виде поправок положения опорного приемника, определенного на опорной станции, или в виде поправок часов и/или орбиты конкретного спутника ГСП. Дифференциальные операции, использующие измерения фазы несущей, часто упоминаются как операции позиционирования/навигации кинематического режима в реальном времени (КРРВ).
Фундаментальный принцип дифференциальной ГСП (ДГСП) заключается в использовании преимущества пространственных и временных корреляций ошибок, присущих измерениям ГСП, с целью устранения факторов шума при измерении псевдодальности и/или фазы несущей, происходящих в результате этих факторов ошибки. Однако, хотя временная ошибка часов спутника ГСП, которая проявляется как смещение при измерении псевдодальности или фазы несущей, идеально коррелируется между опорным приемником и пользовательским приемником, большая часть других факторов ошибок ни коррелируется, ни корреляция не сокращает их в широкозонных применениях, т.е. когда расстояние между опорным и пользовательским приемниками становится большим.
Чтобы преодолеть неточность системы ДГСП в широкозонных применениях, были предложены различные методики региональных, широкозонных или глобальных ДГСП (ниже упоминаемые как широкозонная ДГСП или ШЗДГСП). ШЗДГСП включают в себя сеть многочисленных опорных станций, находящихся на связи с вычислительным центром или центральной станцией. Поправки на исправление ошибок вычисляются на центральной станции, основываясь на известных расположениях опорных станций и измерениях, производимых ими. Вычисленные поправки на исправление ошибок затем передаются пользователям по линиям связи, например через спутники, по телефону или радио. Посредством использования многочисленных опорных станций ШЗДГСП обеспечивает более точные оценки поправок на исправление ошибок.
Таким образом, был разработан ряд различных методик для получения высокоточной дифференциальной навигации с использованием измерений фазы несущей ГСП. Методикой с наивысшей точностью является методика КРРВ, которая имеет типовую точность примерно один сантиметр. Чтобы получить такую точность, однако, должна быть разрешена полнопериодная неоднозначность в дифференциальных измерениях фазы несущей. Когда является малым расстояние между пользовательским приемником и опорным приемником (протяженность базовой линии), методика КРРВ является очень выгодной, так как в данном случае полнопериодная неоднозначность может быть разрешена не только точно, но также и быстро. С другой стороны, когда протяженность базовой линии составляет более нескольких десятков километров, может стать невозможным разрешение полнопериодной неоднозначности, и не может быть достигнута нормальная точность КРРВ. Другим ограничением методики КРРВ является то, что она требует поддержание локальной радиолинии между опорным приемником и навигационным приемником.
Методики ШЗДГСП, которые используют дифференциальный способ по фазе несущей, также могут достигать очень высокой точности навигации. Дифференциальные методики ШЗДГСП также характеризуются надежными низкочастотными линиями связи на большие расстояния или надежными линиями спутниковой связи. Таким образом, поправки, в основном, могут передаваться на навигационные приемники без существенных перерывов. Однако методики ШЗДГСП обычно рассматривают полнопериодные неоднозначности в качестве переменной с действительными значениями (не целочисленными) и определяют «плавающую неоднозначность», которая обычно очень плохо определяется до тех пор, пока не будут получены данные измерений, охватывающие временной интервал существенного изменения геометрии спутников. Таким образом, в приложении ШЗДГСП часто требуется временной интервал, равный максимально одному или двум часам, для разрешения «плавающей неоднозначности», чтобы получить точность менее 10 сантиметров в навигационном положении.
Сущность изобретения
Настоящая заявка включает в себя способ объединения использования навигационных методик КРРВ и ШЗДГСП, так что слабость каждой методики может дополняться сильными свойствами другой методики. Основным недостатком методики ШЗДГСП является то, что навигационному приемнику требуется длительное истекшее время (часто более часа) для определения значений плавающей неоднозначности, которые требуются для преобразования измерений фазы несущей в точные измерения дальности. Основными недостатками методики КРРВ является то, что она требует линию передачи данных в реальном времени (обычно в пределах линии прямой видимости) между пользовательским приемником ГСП и опорным приемником ГСП, и что полнопериодная неоднозначность может быть определена только тогда, когда разделяющее расстояние между опорным приемником ГСП и пользовательским приемником ГСП является относительно малым.
Эти отдельные недостатки могут быть устранены посредством использования способа объединения использования навигационных методик КРРВ и ШЗДГСП согласно одному варианту осуществления настоящего изобретения. Способ включает в себя использование известного положения пользовательского приемника для инициализации значений плавающей неоднозначности в системе ШЗДГСП. Когда пользовательский приемник был неподвижным, известное положение пользовательского приемника может представлять собой обследованное положение или положение, полученное из предшествующей операции. Когда пользовательский приемник перемещается, известное расположение может быть получено с использованием системы КРРВ.
Таким образом, при объединенном действии, когда доступна линия связи для навигации в КРРВ, выходные результаты положения, скорости и времени (ПСВ) пользовательского приемника могут быть получены с использованием системы КРРВ, тогда как система ШЗДГСП выполняется в фоновом режиме и ее выходные результаты постоянно инициализируются для соответствия выходным результатам системы КРРВ. Когда прерывается линия связи для навигации в КРРВ или когда пользовательский приемник отходит на слишком большое расстояние от опорной станции в системе КРРВ, выходные результаты ПСВ пользовательского приемника могут быть получены с использованием системы ШЗДГСП, которая была инициализирована, когда работала КРРВ. Инициализация исключает нормальное время «вхождения в синхронизм» от 15 минут до двух часов, необходимое для определения значений плавающей неоднозначности, когда неизвестно положение пользовательского приемника ГСП. Это обеспечивает очень точные решения ПСВ от системы ШЗДГСП, когда система КРРВ недоступна или является неточной и делает методику ШЗДГСП более практичной для целей высокоточного позиционирования и навигации в реальном времени.
Краткое описание чертежей
Фиг.1 представляет собой блок-схему комбинации системы ШЗДГСП и локальной системы КРРВ согласно одному варианту осуществления настоящего изобретения.
Фиг.2 представляет собой блок-схему компьютерной системы, связанной с пользовательским приемником ГСП.
Фиг.3А представляет собой блок-схему последовательности операций, иллюстрирующую способ объединения использования системы ШЗДГСП и локальной системы КРРВ.
Фиг.3В представляет собой блок-схему последовательности операций, иллюстрирующую способ обновления положения приемника, использующий локальную систему КРРВ.
Фиг.4 представляет собой блок-схему последовательности операций, иллюстрирующую последовательность операций процесса для объединенного действия с использованием как системы ШЗДГСП, так и локальной системы КРРВ.
Фиг.5 представляет собой схему, иллюстрирующую ситуацию, в которой может использоваться объединенное действие.
Описание изобретения
Фиг.1 иллюстрирует систему 100 широкозонной или глобальной дифференциальной ГСП (ШЗДГСП) согласно одному варианту осуществления настоящего изобретения. Как показано на фиг.1, система 100 ШЗДГСП включает в себя сеть опорных станций 120, причем каждая имеет приемник 122 ГСП и одну или несколько центральных станций 105 обработки. Опорные станции 120 непрерывно предоставляют необработанные наблюдаемые параметры ГСП центральной станции 105 для обработки. Эти наблюдаемые параметры включают в себя измерения кода и фазы несущей ГСП, эфемериды и другую информацию, получаемую в соответствии с сигналами, принимаемыми от множества спутников 110 на опорных станциях 120. Опорные станции 120 размещаются в известных расположениях по широкой зоне 101, такой как континент, для системы широкозонной ДГСП, или вокруг земного шара для сети глобальной ДГСП. Центральные станции 105 представляют собой оборудование, на котором обрабатываются наблюдаемые параметры ГСП и вычисляются поправки ДГСП. Если предусмотрены многочисленные независимые центральные станции, предпочтительно, чтобы они географически были разделены и работали параллельно.
Система 100 ШЗДГСП может использоваться одним или несколькими пользователями (или пользовательскими устройствами или объектами) 140, причем каждый имеет пользовательский приемник 142 ГСП для целей позиционирования и/или навигации. В одном варианте осуществления настоящего изобретения пользователь 140 связывается с близлежащей опорной станцией 120 по радиолинии КРРВ, так что пользовательский приемник 142 и близлежащая опорная станция 120 образуют локальную систему 150 КРРВ. Система 100 дополнительно включает в себя обычные линии передачи данных (не показаны) для обеспечения надежных транспортных механизмов для посылки наблюдаемых параметров ГСП от опорных станций 120 центральным станциям 105 и для широковещательной рассылки вычисленных поправок от центральных станций 105 опорным станциям 120 и пользователям 140. Континентальная система ШЗДГСП обычно имеет примерно от 3 до 10 опорных приемников, и глобальная система ШЗДГСП обычно имеет примерно от 20 до 100 опорных приемников, подающих данные на центральные станции 105. В одном варианте осуществления настоящего изобретения наблюдаемые параметры ГСП посылаются с опорных станций 120 центральным станциям 105 через Интернет, и вычисленные поправки посылаются также через Интернет с центральных станций на одну или несколько наземных станций (не показаны) для передачи по линии «вверх» на один или несколько спутников (не показаны), которые затем выполняют широковещательную передачу вычисленных поправок для приема опорными станциями 120 и пользовательским приемником 142.
В одном варианте осуществления настоящего изобретения пользователь или объект 140 также оснащается компьютерной системой 144, связанной с пользовательским приемником 142 ГСП. Как показано на фиг.2, компьютерная система 144 включает в себя центральный процессор (ЦП) 146, память 148, один или несколько портов 154 ввода, один или несколько портов 156 вывода и (необязательно) пользовательский интерфейс 158, связанные друг с другом посредством одной или нескольких шин 152 связи. Память 148 может включать в себя высокоскоростное оперативное запоминающее устройство и может включать в себя энергонезависимое массовое запоминающее устройство, такое как одно или несколько устройств хранения на магнитных дисках или устройств флэш-памяти.
Память 148 предпочтительно хранит операционную систему 162, процедуры 164 приложения ГСП и базу 170 данных. Процедуры 164 приложения ГСП могут включать в себя процедуры 166 для выполнения способа 300 объединения использования локальной системы 150 КРРВ и системы 160 ШЗДГСП, как более подробно описано ниже. Операционная система 162 и программы и процедуры 164 приложения, хранимые в памяти 148, предназначены для исполнения посредством ЦП 146 компьютерной системы 144. Память 148 предпочтительно также хранит структуры данных, используемые во время исполнения процедур 164 приложения ГСП, включая измерения 168 псевдодальности и фазы несущей ГСП, поправки 172 ГСП, принятые от центральных станций, а также другие структуры данных, описанные в данном документе.
Порты 154 ввода предназначены для приема данных от приемника 142 ГСП, для приема информации от опорной станции 120 в локальной системе 120 КРРВ по радиолинии 124 и для приема поправок ГСП и другой информации от центральных станций 105 посредством линии 107 спутниковой связи. Порт 156 вывода используется для вывода данных на опорную станцию 120 по радиолинии 124. В одном варианте осуществления настоящего изобретения ЦП 146 и память 148 компьютерной системы 144 объединены с приемником 142 ГСП в одно устройство внутри одного корпуса, как показано на фиг.2. Однако такое объединение в одно устройство не требуется для осуществления способов настоящего изобретения.
Поэтому пользователь или объект 140 может участвовать в двух различных режимах работы или одновременно, или в различные моменты времени. Пользователь или объект 140 может работать в режиме ШЗДГСП, в котором пользователь или объект 140 позиционирует себя или выполняет навигацию с использованием системы 100 ШЗДГСП, и/или в режиме КРРВ, в котором пользователь или объект 140 позиционирует себя или выполняет навигацию с использованием локальной системы 150 КРРВ. Когда пользователь или объект 140 находится близко к опорной станции 120, с которой он связан, и может поддерживаться радиолиния между пользователем или объектом 140 и опорной станцией 120, пользователь может использовать локальную систему 150 КРРВ для своего позиционирования относительно опорной станции 120. Локальная система 150 КРРВ более выгодная, чем система 100 ШЗДГСП, в том, что она более точная, и что может быть быстро разрешена полнопериодная целочисленная неоднозначность, как объяснено ниже.
Используя локальную систему 150 КРРВ, когда выполняются измерения в отношении n спутников 110, видимых для опорного приемника 122 ГСП, и связанного с ними пользовательского приемника 142 ГСП, измерения могут использоваться для определения положения пользователя или объекта 140 по следующему уравнению в формате матрицы:

где ∇Φ=[∇ϕ
1 ∇ϕ
2 … ∇ϕ
n]T представляет собой вектор измерения фазы несущей, образованный дифференциальным измерением фазы несущей относительно каждого из n спутников 110, N=[N
1
N
2 … N
n]T представляет собой вектор целочисленной неоднозначности, образованный дифференциальной целочисленной неоднозначностью, связанной с каждым из дифференциальных измерений фазы несущей в векторе измерения фазы несущей, H=[h
1 h
2 … h
n]T представляет собой матрицу чувствительности измерений, образованную единичными векторами от пользователя или объекта 140 к n спутникам 110, x представляет собой вещественный вектор неизвестного состояния (или вещественный вектор), включающий в себя вектор положения от опорной станции 120 к пользователю или объекту 140 в локальной системе 150 КРРВ, и  представляет собой вектор шума измерения (или вектор невязок дальности по фазе), образованный дифференциальным шумом фазы несущей относительно каждого из n спутников 110.
представляет собой вектор шума измерения (или вектор невязок дальности по фазе), образованный дифференциальным шумом фазы несущей относительно каждого из n спутников 110.
Для определения вещественного вектора x, используя уравнение (1), должен быть разрешен вектор N целочисленной неоднозначности. Многие различные способы были разработаны для разрешения значений целочисленной неоднозначности, включенных в вектор N целочисленной неоднозначности, и эти способы обычно используют процесс поиска для нахождения комбинации значений целочисленной неоднозначности, которая удовлетворяет определенным критериям, таким как минимальная норма вектора ΔΦ невязок измерения,

где ΔΦ представляет собой вектор невязок дальности по фазе, соответствующий возможному вектору  целочисленной неоднозначности, включающему в себя комбинацию значений целочисленной неоднозначности, и
целочисленной неоднозначности, включающему в себя комбинацию значений целочисленной неоднозначности, и  представляет собой решение уравнения (1) по методу наименьших квадратов,
представляет собой решение уравнения (1) по методу наименьших квадратов,

или

где
представляет собой ковариационную матрицу измерений, образованную посредством σ
i, которое представляет собой среднеквадратическое отклонение дифференциального шума  фазы несущей, вычисленное с использованием обычных способов. Пример способов вычисления σ
i можно найти в “Precision, Cross Correlation, and Time Correlation of GPS Phase and Code Observations,” by Peter Bona, GPS Solution, Vol. 4, No. 2, Fall 2000, p. 3-13, или в “Tightly Integrated Attitude Determination Methods for Low-Cost Inertial Navigation : Two-Antenna GPS and GPS/Magnetometer,” by Yang, Y., Ph.D. Dissertation, Dept. of Electrical Engineering, University of California, Riverside, CA June 2001, оба документа включены по ссылке.
фазы несущей, вычисленное с использованием обычных способов. Пример способов вычисления σ
i можно найти в “Precision, Cross Correlation, and Time Correlation of GPS Phase and Code Observations,” by Peter Bona, GPS Solution, Vol. 4, No. 2, Fall 2000, p. 3-13, или в “Tightly Integrated Attitude Determination Methods for Low-Cost Inertial Navigation : Two-Antenna GPS and GPS/Magnetometer,” by Yang, Y., Ph.D. Dissertation, Dept. of Electrical Engineering, University of California, Riverside, CA June 2001, оба документа включены по ссылке.
Другие примеры способов поиска можно найти в “Instantaneous Ambiguity Resolution,” by Hatch, R., in the Proceedings of the KIS Symposium 1990, Banff, Canada, которая включена здесь по ссылке, и в заявке на патент с общей собственностью на “Fast Ambiguity Resolution for Real Time Kinematic Survey and Navigation”, заявка на патент № 10/338 264, которая также включена здесь по ссылке.
При разрешенной целочисленной неоднозначности положение, скорость и время (ПСВ) пользовательского приемника 142 могут быть точно вычислены в виде решений локальной системы 150 КРРВ.
Несмотря на ее многие преимущества локальная система 150 КРРВ может быть не всегда доступна для пользователя или объекта 140, так как пользователь может перемещаться в расположение, которое находится слишком далеко от опорной станции 120 или вне видимости с опорной станции 120, так что не может поддерживаться радиолиния 124 между пользователем или объектом 140 и опорной станцией. В таких ситуациях наведенная ионосферой ошибка не может быть устранена удовлетворительно посредством учета разности между измерениями у пользователя или объекта 140 и на опорной станции 120. Эта ошибка оказывает влияние на вышеупомянутый процесс поиска в отношении вектора целочисленной неоднозначности, так как она вызывает увеличение невязок измерения, включенных в вектор ΔΦ невязок измерения.
Поэтому в тех ситуациях, когда локальная система 150 КРРВ недоступна или потеряла свою точность из-за большого расстояния между пользовательским приемником ГСП и опорной станцией, пользователю может потребоваться работать в режиме ШЗДГСП, в котором используется другой подход к разрешению целочисленной неоднозначности. Используя систему 100 ШЗДГСП, каждая полнопериодная неоднозначность оценивается как переменная с действительными значениями (не целыми числами). Эта практика часто упоминается как определение значения «плавающей неоднозначности». Один способ определения значения «плавающей неоднозначности» включает в себя образование скорректированных с учетом рефракции измерений кода и фазы несущей, основанных на необработанных измерениях ГСП, выполненных у пользователя или объекта 140, масштабирование измерений фазы несущей в те же единицы, что и измерения кода, и вычитание каждого масштабированного измерения фазы несущей из соответствующего измерения кода с целью получения значения сдвига. В одном варианте осуществления настоящего изобретения скорректированное с учетом рефракции измерение кода, обозначенное как PRC, образуется следующим образом:

где P 1 и P 2 представляют собой необработанные измерения кода псевдодальности на частотах L1 и L2 f 1 и f 2, соответственно, в конкретный период измерений. Скорректированные с учетом рефракции измерения фазы несущей, обозначенные как L RC, образуются аналогично следующим образом:

где L 1 и L 2 представляют собой измерения фазы несущей, масштабированные длинами волн сигналов L1 и L2, соответственно, и каждое включает в себя приблизительное значение полнопериодной неоднозначности, которое было добавлено так, чтобы вызвать приближение масштабированного измерения фазы несущей к такому же значению, что и соответствующее измерение кода. Таким образом,

где φ 1 и φ 2 представляют собой необработанные измерения фазы несущей на частотах L1 и L2, соответственно, в этом же периоде измерений, и полнопериодные значения N 1 и N 2 были инициализированы в начале отслеживания фазы несущей пользователем или объектом 140 для получения значений, которые находятся в пределах одной длины волны несущей соответствующих измерений кода, чтобы поддерживать малыми разности между масштабированными измерениями фазы несущей и соответствующими измерениями кода. Из уравнения (7) отмечается, что скорректированные с учетом рефракции измерения фазы несущей включают в себя полнопериодную неоднозначность с длиной λ волны, определяемой суммой f 1 и f 2 (которая равна примерно 2,803 ГГц), так что λ примерно равна 0,1070 метра (т.е. с/(f 1 + f 2).
Так как ионосферные влияния были устранены в измерениях как кода, так и фазы несущей в соответствии с уравнениями (6)-(9), и влияние ошибок часов и орбиты спутника на измерения псевдодальности и фазы несущей одинаковое, значения P RC и L RC, полученные на этапе 310, должны быть почти идентичными за исключением возможной полнопериодной неоднозначности, связанной с измерением L RC фазы несущей и с более высоким шумом многолучевости при измерении P RC кода. Это позволяет получить разрешение полнопериодной неоднозначности в L RC посредством сглаживания сдвига (O=P RC -L RC) между скорректированным с учетом рефракции измерением кода и скорректированным с учетом рефракции измерением фазы несущей по серии периодов измерений, так что сдвиг становится все более и более точной оценкой «плавающей неоднозначности». Сглаженное значение сдвига может быть дополнительно уточнено посредством использования постфиксных невязок измерения для обеспечения дополнительной корректировки измерений фазы несущей, так что невязки откорректированных измерений равны почти нулю.
В одном варианте осуществления настоящего изобретения сдвиг сглаживается посредством взятия расширяющегося среднего сдвига следующим образом:

где i = 1, 2, 3 … используется для обозначения периода измерения, и значение η представляет собой доверительное значение, которое увеличивается, когда O i становится более точной оценкой значения плавающей неоднозначности. В одном варианте осуществления настоящего изобретения η равно i до тех пор, пока не будет достигнуто максимальное значение усреднения. Например, если предполагается, что измерение фазы несущей имеет только 1/100-ую от шума измерения кода, значение «η» будет ограничено значением, которое меньше чем 100 в квадрате или 10 000. Уравнение (9), таким образом, может вычисляться рекурсивным образом, пока не будет достигнута предопределенная точность значения плавающей неоднозначности.
При сглаженном сдвиге O i сглаженное, скорректированное с учетом рефракции измерение S кода может быть получено посредством добавления скорректированного с учетом рефракции измерения фазы несущей для текущего периода измерения к сглаженному сдвигу, так что

которое имеет точность измерения фазы несущей, но без связанных с ним неоднозначностей.
Вышеупомянутый процесс, как описано в связи с уравнениями (6)-(11), выполняется для каждого из множества спутников, являющихся видимыми для пользовательского приемника 142 ГСП. При сглаженном, скорректированном с учетом рефракции измерении кода, доступном для каждого из множества спутников, являющихся видимыми для пользовательского приемника 142 ГСП, могут быть получены псевдодальности до этих спутников. Эти псевдодальности уточняются при помощи поправок ШЗДГСП, принимаемых от центральных станций 105, и используются при определении местоположения по методу взвешенных наименьших квадратов для вычисления вектора x состояния. Таким образом, могут вычисляться положение, скорость и время (ПСВ) пользовательского приемника 142 ГСП в качестве решений ШЗДГСП для ПСВ пользовательского приемника 142 ГСП.
Другие примеры способов получения сглаженных скорректированных с учетом рефракции сдвигов можно найти в “The Synergism of Code and Carrier Measurements,” by Hatch, R. in Proceedings of the Third International Geodetic Symposium on Satellite Doppler Positioning, DMA, NOS, Las Cruces, N.M., New Mexico State University, Vol. II, pp. 1213-1232, которая включена здесь по ссылке, и в заявке на патент с общей собственностью на “Method for Generating Clock Corrections for a Wide-Area or Global Differential GPS System”, реестр поверенного № 009792-0042-999, которая также включена здесь по ссылке.
Также можно определить значения «плавающей неоднозначности» в качестве отдельных состояний в решении по методу наименьших квадратов или калмановской фильтрации. Когда неоднозначности включены в виде состояний, значение оценки для каждого значения плавающей неоднозначности корректируется в соответствии с отклонением, так что она становится все более точной, когда геометрия системы изменяется вследствие движения спутников. Таким образом, эта методика также дает все более точную оценку во времени. См. статью Patrick H. C. Hwang в Navigation Vol. 38, No. 1, Spring 1991, озаглавленную “Kinematic GPS for Differential Positioning: Resolving Integer Ambiguities on the Fly”, которая включена здесь по ссылке.
Существуют многие комбинации и разновидности вышеописанных методик, которые могут использоваться для оценивания значений «плавающей неоднозначности». Однако все они включают в себя обработку данных в течение существенного интервала времени. Интервал времени часто может составлять максимально один или два часа, прежде чем можно быть уверенным, что «плавающая неоднозначность» достаточно точная, чтобы получить точность менее 10 сантиметров в управляемом навигацией положении пользователя 140. Чтобы уменьшить интервал времени для получения значений «плавающей неоднозначности», система ШЗДГСП может инициализироваться так, как описано ниже, с использованием известного расположения пользовательского приемника 142 ГСП.
Фиг.3А иллюстрирует способ 300 инициализации системы 100 ШЗДГСП. Как показано на фиг.3, способ 300 включает в себя этап 310, на котором определяется, является ли пользователь неподвижным в известном расположении. Это может быть выполнено в соответствии с вводом пользователя или при помощи некоторого обычного механизма, который позволяет компьютеру 144 определить, был ли неподвижным пользовательский приемник 142. Если пользовательский приемник 142 был неподвижным, и положение пользовательского приемника 142 точно известно, то это положение может использоваться для вычисления значений плавающей неоднозначности без помощи локальной системы 150 КРРВ. Исследованное положение пользовательского приемника 142 ГСП может использоваться в качестве известного положения или при некоторых условиях положение может быть известным, просто потому что пользовательский приемник 142 был неподвижным, и положение пользователя уже было определено во время предыдущей операции.
В ответ на определение, что пользователь является неподвижным в известном расположении, способ 300 переходит на этап 320, на котором положение пользовательского приемника устанавливается в известное расположение. В противном случае, способ 300 переходит на этап 330, на котором включается локальная система 150 КРРВ для автоматического обновления пользовательского расположения, используя описанный выше способ.
Способ 300 дополнительно включает в себя этап 340, на котором расположение пользовательского приемника, определено ли оно на этапе 320 или на этапе 330, используется для вычисления набора теоретических дальностей до спутников 110. Это может включать в себя вычисление положений спутников 110, основываясь на широковещательных эфемеридах от системы 100 ШЗДГСП и корректировки этих положений при помощи орбитальных поправок, передаваемых широковещательным образом системой 100 ШЗДГСП. Если как положение пользовательского приемника, так и положения спутников заданы в прямоугольных координатах, теоретическая дальность от пользователя 140 до каждого спутника 110 может вычисляться следующим образом:

где нижний индекс s обозначает координату спутника, и нижний индекс u обозначает координату приемника пользователя или объекта.
Способ 300 дополнительно включает в себя этап 350, на котором начальное значение a плавающей неоднозначности, соответствующее каждому спутнику, вычисляется посредством вычитания из вычисленной теоретической дальности дальности, полученной из скорректированного с учетом рефракции измерения фазы несущей в отношение этого же спутника, так что

где  представляет скорректированное с учетом рефракции измерение фазы несущей, вычисленное по уравнению (7) в начальном периоде измерений.
представляет скорректированное с учетом рефракции измерение фазы несущей, вычисленное по уравнению (7) в начальном периоде измерений.
Способ 300 дополнительно включает в себя этап 360, на котором значения плавающей неоднозначности разрешаются посредством добавления начальных значений плавающей неоднозначности к соответствующим скорректированным с учетом рефракции измерениям фазы несущей в последующих периодах измерений, т.е.

и рассматривания значений плавающей неоднозначности также известными, так что достоверность устанавливается высокой (или отклонение устанавливается низким). На практике этап 360 выполняется с использованием малого значения коэффициента усиления для корректировки значений плавающей неоднозначности в процессе определения значений плавающей неоднозначности. Например, если значения плавающей неоднозначности определяются посредством сглаживания сдвига между скорректированным с учетом рефракции измерением кода и скорректированным с учетом рефракции измерением фазы несущей по уравнению (9), малый коэффициент усиления означает рассматривание значения плавающей неоднозначности, как если бы большое количество значений сдвига было использовано при его вычислении, так что η=i+(большое число). Если значение неоднозначности определяется в процессе калмановской фильтрации, малый коэффициент усиления достигается установкой отклонения состояния неоднозначности на малое значение.
Таким образом, посредством использования известного расположения неподвижного пользовательского приемника 142 или посредством использования локальной системы 150 КРРВ для инициализации значений плавающей неоднозначности исключается обычное время «вхождения в синхронизм» от пятнадцати минут до двух часов, требуемое для определения значений плавающей неоднозначности, когда неизвестно положение пользовательского приемника. Это может значительно ускорить процесс разрешения неоднозначностей фазы несущей в системе 100 ШЗДГСП, делая систему 100 ШЗДГСП более подходящей для целей позиционирования и/или навигации в реальном времени.
Чтобы использовать локальную систему 150 КРРВ для обновления положения пользовательского приемника в способе 300, положение опорной станции 120 в локальной системе 150 КРРВ должно определяться точно в системе 100 ШЗДГСП. Обычная система КРРВ может использоваться в относительном смысле, означая, что положение пользовательского приемника 142 может определяться относительно опорного приемника. Таким образом, точные относительные положения пользовательского приемника 142 ГСП могут быть получены, даже если координаты опорной станции не являются особенно точными, и данные координат кроме нормальных данных ГСП используются для позиционирования опорной станции. Для объединенного использования локальной системы 150 КРРВ и системы 100 ШЗДГСП, однако, должно быть определено точное положение опорного приемника 120 в системе 150 КРРВ. Если используется неправильное положение для опорной станции 120 в локальной системе 150 КРРВ, то это вызовет неправильные значения плавающей неоднозначности, вычисленные так, как описано выше. Это приведет к медленному дрейфу вычисленного положения пользовательского приемника 142, так как значения плавающей неоднозначности медленно корректируются к правильному значению во время последующей обработки ШЗДГСП.
В одном варианте осуществления настоящего изобретения среднее положение опорной станции 120 в системе 150 КРРВ определяется на основе данных часов позиционирования от системы 100 ШЗДГСП для повышенной надежности. В альтернативном варианте осуществления компьютерная система на опорной станции 120 принимает введенное оператором значение для ее положения и предоставляет положение пользователю 140. Это позволяет немедленно начинать относительное позиционирование КРРВ, используя это положение для опорной станции. Одновременно, более точное положение опорной станции 120 определяется системой 100 ШЗДГСП и передается опорной станции 120. Это более точное положение или сдвиг между введенным оператором положением и более точным положением опорной станции 120, определенным системой 100 ШЗДГСП, затем передается с относительно низкой скоростью передачи пользователю 140.
Фиг.3В иллюстрирует более подробно этап 330 в способе 300, на котором положение пользователя обновляется с использованием локальной системы 150 КРРВ. Как показано на фиг.3В, этап 330 включает в себя подэтап 331, на котором пользователь или объект 140 принимает введенное оператором положение опорной станции 120 в системе 150 КРРВ, и подэтап 333, на котором пользователь или объект 140 выполняет операцию локального КРРВ для определения своего собственного положения относительно положения опорной станции 120. Этап 330 дополнительно включает в себя подэтап 335, на котором пользователь или объект 140 принимает более точное положение опорной станции 120, определенное системой 100 ШЗДГСП, или сдвиг между введенным оператором положением опорной станции 120 и более точным положением опорной станции 120, определенным системой 100 ШЗДГСП. Этап 330 дополнительно включает в себя подэтап 337, на котором пользователь или объект 140 вычисляет абсолютное положение пользовательского приемника 142 ГСП в прямоугольных координатах, используя или введенное пользователем положение опорной станции, или положение опорной станции 120, определенное системой 100 ШЗДГСП (если доступна).
Примером, где могут быть получены преимущества посредством использования способа 300, является позиционирование поезда. Когда поезд проходит через туннель, теряется как локальная линия связи КРРВ, так и глобальная линия связи ШЗДГСП. В этой ситуации линия передачи данных КРРВ может быть установлена для инициализации значений плавающей неоднозначности ШЗДГСП, когда поезд выйдет из туннеля. Это устраняет длинный интервал передачи данных, который иначе бы потребовался для определения правильных значений плавающей неоднозначности.
Другим примером, где могут быть получены преимущества посредством использования способа 300, является позиционирование самолета сразу же после взлета. В данном случае, локальная система КРРВ в аэропорте, где самолет готовится взлететь, может использоваться для инициализации неоднозначностей ШЗДГСП или до, или во время взлета.
Таким образом, пользователь или объект 140, который включает в себя пользовательский приемник 142 ГСП и компьютерную систему 144, подсоединенную к пользовательскому приемнику 142 ГСП, может работать как в режиме КРРВ, так и в режиме ШЗДГСП. Локальная система 150 КРРВ является более благоприятной, чем система ШЗДГСП, так как процесс поиска для локальной системы 150 КРРВ, как описано выше, занимает значительно меньше времени, чем способ сглаживания в системе 100 ШЗДГСП для разрешения значений целочисленной неоднозначности. В процессе поиска сглаживание измерений кода или не требуется, или выполняется сглаживание измерений кода со значительно более короткой продолжительностью, не определяя непосредственно полнопериодную неоднозначность, но предоставляя уменьшенную неопределенность в начальном наборе значений целочисленной неоднозначности, так что последующий процесс поиска может быть более жестко ограничен. По этой причине, только нескольких секунд передачи данных достаточно для получения начального набора значений неоднозначности. Локальная система 150 КРРВ, однако, доступна только в ситуациях, где может поддерживаться линия связи между пользовательским приемником 142 ГСП и опорной станцией 120 в локальной системе 150 КРРВ, и пользователь или объект 140 не перемещается слишком далеко от опорной станции 120 в локальной системе 150 КРРВ. Когда эти условия не удовлетворяются, т.е. когда локальная система 150 КРРВ или недоступна, или неточная, пользователь может обратиться к системе 100 ШЗДГСП для навигации посредством использования положения пользовательского приемника, определенного в последний раз системой 150 КРРВ для инициализации системы ШЗДГСП, так что исключается длинное время «вхождения в синхронизм» для получения значений «плавающей неоднозначности».
Фиг.4 иллюстрирует последовательность 400 операций процесса для объединенной работы КРРВ и ШЗДГСП, выполняемой компьютерной системой 144 пользователя. Последовательность операций процесса включает в себя этапы 440, 450 и 460. Как показано на фиг.4, когда доступны поправки КРРВ, пользователь 140 работает в режиме КРРВ. Он принимает положение 401 опорной станции 120 в локальной системе 150 КРРВ и выполняет этап 440, на котором определяются ПСВ пользовательского приемника с использованием поправок 410 КРРВ, принимаемых от опорного приемника 120 в локальной системе 150 КРРВ. Во время выполнения этапа 440 пользователь 140 может продолжать принимать поправки 420 ШЗДГСП от центральных станций 105, так что решения ШЗДГСП могут генерироваться в фоновом режиме. Пользователь 140 также может принимать обновленное положение 430 опорной станции 120 в локальной системе 150 КРРВ от центральной станции 105 с относительно низкой скоростью передачи. Используя обновленное положение опорной станции 120 и решение КРРВ положения пользовательского приемника, решения ШЗДГСП могут непрерывно инициализироваться в фоновом режиме для согласования с решениями КРРВ в соответствии со способом 300, описанным выше.
Когда теряются поправки КРРВ, пользователь 140 переключается в режим ШЗДГСП работы и выполняет этап 450, на котором пользователь 140 использует положение пользовательского приемника, определенное в режиме КРРВ работы, непосредственно перед тем, как поправки КРРВ стали недоступными для инициализации значений плавающей неоднозначности для режима ШЗДГСП работы в соответствии со способом 300, описанным выше. Таким образом, значения «плавающей неоднозначности» могут быть определены без длительного времени «вхождения в синхронизм». Во время выполнения этапа 450 пользователь 140 продолжает принимать поправки 420 ШЗДГСП от центральных станций 105. Пользователь 140 также может принимать обновленное положение 430 опорной станции 120 в локальной системе 150 КРРВ от центральной станции 105 с относительно низкой скоростью передачи. Координаты опорной станции используются для преобразования положения пользовательского приемника, сгенерированного в режиме ШЗДГСП, в положение относительно локального опорного приемника 120. Таким образом, результаты ПСВ, сгенерированные компьютерной системой 144 пользователя, будут плавно переходить между двумя различными режимами работы.
Когда снова станут доступны поправки КРРВ, пользователь возобновляет работу КРРВ на этапе 460, которая аналогична работе КРРВ на этапе 440.
Процесс 400 может использоваться во многих применениях. Одно применение включает в себя расширение работы КРРВ в зоны, где не может поддерживаться радиолиния КРРВ, тогда как линия связи ШЗДГСП, по меньшей мере, в основном доступна. Например, как показано на фиг.5, пользователем или объектом 140 может быть сельскохозяйственное транспортное средство 510, перемещающееся по рядам 520 в зоне 501 с чередующимися возвышенностями, причем пользовательский приемник 142 прикреплен к сельскохозяйственному транспортному средству или к сельскохозяйственному оборудованию, которое подсоединено к сельскохозяйственному транспортному средству. Зона 501 включает в себя зону 503, которая является видимой с опорной станции 120 в локальной системе 150 КРРВ, и зоны (заштрихованы) 505 и 507, которые не являются видимыми с опорной станции 120. Так как линия связи КРРВ обычно представляет собой линию прямой видимости, данные КРРВ будут теряться всякий раз, когда пользовательский приемник 142 ГСП перемещается из зоны 503 в зону 505 или 507. Но линия передачи данных между пользовательским приемником 142 и системой 100 ШЗДГСП, в основном, доступна, так как она часто обеспечивается спутниками. Посредством инициализации плавающих неоднозначностей в системе 100 ШЗДГСП, всякий раз когда радиолиния КРРВ становится доступной и система 150 КРРВ действующей, точность работы КРРВ может, практически, сохраняться во время тех интервалов, когда теряется линия связи КРРВ.
Хотя система 100 ШЗДГСП/КРРВ на фиг.1 использовалась в вышеприведенном описании, понятно, что любая региональная, широкозонная или глобальная система, которая использует измерения фазы несущей со спутников для целей позиционирования и/или навигации и, таким образом, требует определение значений неоднозначности, связанных с измерениями фазы, также может воспользоваться преимуществами способа 300 и процесса 400, описанных выше. Примеры таких систем включают в себя систему Starfire™, разработанную компанией John Deere Company, и региональную систему высокоточной национальной дифференциальной (ВТ-НД) ГСП, разрабатываемую несколькими правительственными учреждениями США.
Изобретение относится к системам позиционирования и может быть использовано для разрешения плавающей неоднозначности несущей. В изобретении используют известное положение пользовательского приемника, который был неподвижен, или используют систему КРРВ для инициализации значений плавающей неоднозначности в широкозонной дифференциальной системе глобального позиционирования (ШЗДГСП), когда пользовательский приемник перемещается. После этого скорректированные с учетом рефракции измерения фазы несущей, полученные на пользовательском приемнике глобальной системы позиционирования ГСП, корректируют посредством включения соответствующих начальных значений плавающей неоднозначности, и значения плавающей неоднозначности рассматриваются как известные (малое отклонение) в последующих процессах для позиционирования пользовательского приемника в системе ШЗДГСП. Технический результат - повышение точности позиционирования в реальном времени. 4 н. и 18 з.п. ф-лы, 5 ил.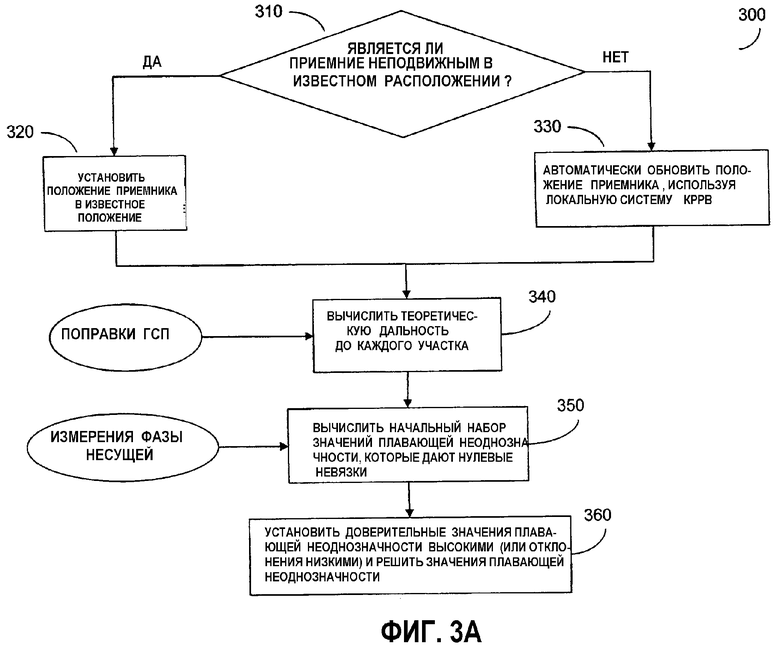
1. Способ определения значения плавающей неоднозначности, соответствующего измерению фазы несущей, полученному пользователем спутниковой системы позиционирования, основываясь на сигналах, принимаемых от одного из множества спутников, причем способ содержит определение положения пользователя;
вычисление теоретической дальности от пользователя до спутника, основываясь на положении пользователя;
вычисление начального значения неоднозначности, основываясь на теоретической дальности и измерении фазы несущей; и
определение значения плавающей неоднозначности, используя начальное значение неоднозначности, в котором определение значения плавающей неоднозначности включает в себя корректировку измерения фазы несущей в каждой из серий периодов измерений, используя начальное значение неоднозначности, значение плавающей неоднозначности вычисляется с использованием откорректированных измерений фазы несущей, и в котором значение плавающей неоднозначности вычисляется посредством взятия расширяющегося среднего, включающего в себя множество сдвигов между откорректированным измерением фазы несущей и соответствующим измерением кода в каждой из серий периодов измерений.
2. Способ по п.1, в котором значение плавающей неоднозначности вычисляется посредством рассматривания значения плавающей неоднозначности, как если бы большое количество значений сдвига было использовано при его вычислении.
3. Способ по п.1, в котором измерения фазы несущей и измерения кода корректируются с учетом рефракции.
4. Способ по п.1, в котором значение плавающей неоднозначности определяется в качестве состояния неоднозначности в процессе калмановской фильтрации, и в котором значение плавающей неоднозначности вычисляется посредством установки отклонения состояния неоднозначности на малое значение.
5. Способ позиционирования или навигации объекта, связанного как с локальным опорным приемником, так и с широкозонной дифференциальной спутниковой системой позиционирования, содержащий
определение первого положения объекта, основываясь только на информации, принятой от локального опорного приемника;
определение значений плавающей неоднозначности, связанных с измерениями фазы несущей, полученными на объекте, используя первое положение объекта; и
определение второго положения объекта, основываясь на информации, принятой от широкозонной дифференциальной спутниковой системы позиционирования, и значениях плавающей неоднозначности.
6. Способ по п.5, в котором первое положение относительно локальной опорной станции, а второе положение является абсолютным положением, причем способ дополнительно содержит
прием положения локальной опорной станции от широкозонной дифференциальной спутниковой системы позиционирования;
преобразование первого положения в абсолютное положение, используя положение локального опорного приемника, перед определением значений плавающей неоднозначности; и
преобразование второго положения в положение относительно локального опорного приемника, используя положение локальной опорной станции.
7. Способ по п.5, в котором определение значений плавающей неоднозначности содержит вычисление начальных значений плавающей неоднозначности, используя первое положение.
8. Способ по п.7, в котором вычисление начальных значений плавающей неоднозначности содержит вычисление теоретических дальностей между объектом и множеством спутников.
9. Способ по п.7, в котором определение значений плавающей неоднозначности содержит корректировку измерений фазы несущей при помощи начальных значений плавающей неоднозначности.
10. Способ по п.9, в котором определение значений плавающей неоднозначности содержит сглаживание измерений кода при помощи корректированных измерений фазы несущей.
11. Спутниковый навигационный приемник, выполненный с возможностью работы в двух или более режимах работы, причем в первом режиме работы спутниковый навигационный приемник определяет первое значение плавающей неоднозначности в соответствии с информацией, принятой от локального опорного приемника, причем первое значение плавающей неоднозначности используется для преобразования измерения фазы несущей в измерение дальности с точностью по меньшей мере первого предопределенного значения, и в котором во втором режиме работы спутниковый навигационный приемник определяет второе значение плавающей неоднозначности в соответствие с информацией, принятой от широкозонной дифференциальной спутниковой системы позиционирования, причем второе значение плавающей неоднозначности используется для преобразования измерения фазы несущей в измерение дальности с точностью по меньшей мере первого предопределенного значения.
12. Спутниковый навигационный приемник по п.11, в котором известное положение спутникового навигационного приемника используется для инициализации по меньшей мере одного значения, выбранного из группы, состоящей из первого значения плавающей неоднозначности и второго значения плавающей неоднозначности.
13. Спутниковый навигационный приемник по п.11, в котором известное положение спутникового навигационного приемника, введенное пользователем, используется для инициализации по меньшей мере одного значения, выбранного из группы, состоящей из первого значения плавающей неоднозначности и второго значения плавающей неоднозначности.
14. Спутниковый навигационный приемник по п.11, в котором используется первый режим работы, если доступна связь с локальным опорным приемником.
15. Спутниковый навигационный приемник по п.11, в котором используется первый режим работы, если расстояние до локального опорного приемника меньше второго предопределенного значения.
16. Спутниковый навигационный приемник по п.11, в котором первое значение неоднозначности с плавающей точкой определяется в первом режиме работы, второе значение неоднозначности с плавающей точкой определяется во втором режиме работы, и в котором второе значение неоднозначности с плавающей точкой инициализируется для соответствия первому значению неоднозначности с плавающей точкой по меньшей мере один раз в течение предопределенного периода времени.
17. Спутниковый навигационный приемник по п.16, в котором инициализация второго значения неоднозначности с плавающей точкой по меньшей мере один раз в течение предопределенного периода времени снижает время установления во втором режиме работы до меньшего значения, чем второе предопределенное значение.
18. Спутниковый навигационный приемник по п.16, в котором используется второй режим работы, если теряется связь с локальным опорным приемником.
19. Спутниковый навигационный приемник по п.11, в котором ранее определенное положение спутникового навигационного приемника используется для инициализации по меньшей мере одного значения, выбранного из группы, состоящей из первого значения плавающей неоднозначности и второго значения плавающей неоднозначности.
20. Спутниковый навигационный приемник по п.11, в котором значения плавающей неоднозначности содержат целые числа.
21. Считываемый компьютером носитель информации, хранящий считываемые компьютером программные инструкции, которые, при их исполнении процессором, инициируют выполнение процессом способа позиционирования или навигации объекта, связанного как с локальным опорным приемником, так и с широкозонной дифференциальной спутниковой системой позиционирования, причем программные инструкции содержат
инструкции для определения первого положения объекта, основываясь только на информации, принятой от локального опорного приемника;
инструкции для определения значений плавающей неоднозначности, связанных с измерениями фазы несущей, полученными на объекте, используя первое положение объекта; и
инструкции для определения второго положения объекта, основываясь на информации, принятой от широкозонной дифференциальной спутниковой системы позиционирования, и на значениях плавающей неоднозначности.
22. Считываемый компьютером носитель по п.21, в котором значения плавающей неоднозначности содержат целые числа.
| DAVID WALSH | |||
| Real Time Ambiguity Resolution While on the Move | |||
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| HWANG P Y C | |||
| Kinematic GPS: resolving integer ambiguities on the fly | |||
| Proceedings of the IEEE, 20 March 1990, pages 579-586 | |||
| US 5935194, 10.08.1999 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| ПРИЕМНИК ГЛОБАЛЬНОЙ СИСТЕМЫ ПОЗИЦИОНИРОВАНИЯ С ОГРАНИЧЕННЫМ ПРОСТРАНСТВОМ ПОИСКА КОДОВОГО СДВИГА ДЛЯ СОТОВОЙ ТЕЛЕФОННОЙ СИСТЕМЫ | 1998 |
|
RU2197780C2 |

