Изобретение относится к области строительства и эксплуатации магистральных трубопроводов, в части контроля и диагностики их состояния, и может быть использовано для буксирования контрольного и диагностического аппарата с заданной равномерной скоростью, обеспечивающей надлежащие точность и эффективность его работы, а также для доставки технологического оборудования различного назначения в заданное место трубопровода.
Известно устройство для перемещения в трубопроводе (RU, патент №2080945, B08B 9/04, 10.06.1997 г.), содержащее корпус и двухзвенный механизм шагового перемещения, включающий силовые цилиндры перемещения одного звена относительно другого, центрирующие и опорные элементы с силовыми цилиндрами. Питание цилиндров осуществляется по гидромагистрали от внешней насосной станции, так же как и управление по электрокабелю от внешнего устройства. Перемещение устройства в трубопроводе осуществляют подводом гидравлической энергии и управляющих импульсов от внешних, вне трубопровода, источников и тем, что попеременно закрепляют одно из звеньев относительно трубопровода и перемещают относительно его другое звено, свободное от закрепления.
Недостатками устройства являются:
- неравномерность скорости перемещения устройства в моменты переключения силовых цилиндров;
- отсутствие контроля скорости перемещения и средств корректирования ее;
- невозможность применения в магистральных трубопроводах, по причине нереальности подачи по магистральным линиям энергии и управляющих импульсов устройству от внешних источников на расстояния, присущие магистральным трубопроводам, измеряемые в иных случаях десятками километров.
Известно внутритрубное транспортное средство (RU, патент №2093281, B08B 9/04, 20.04.1997), содержащее корпус, средство перемещения в виде нескольких движителей с электромеханическим приводом, и средство прижатия движителей к поверхности перемещения, при этом средство перемещения выполнено в виде двух колес, контактирующих с противолежащими участками поверхности перемещения, а средство прижатия выполнено в виде соединяющей их U-образной пластинчатой пружины с разновеликими плечами, при этом энергопитание осуществляется от бортового источника.
Перемещение средства в трубопроводе осуществляют тем, что воздействуют вращаемыми приводом колесами на поверхность трубопровода, с усилием прижатыми к ней, в результате чего возникает реакция поверхности трубопровода, приложенная к средству, перемещающая его по трубопроводу.
Недостатками устройства являются:
- отсутствие контроля скорости перемещения и устройств на нем для ее корректирования;
- невозможность применения в магистральных трубопроводах по причинам: первая - из-за больших расстояний обследуемых участков трубопровода, измеряемых десятками километров, нереально обеспечить энергопитание транспортного средства от аккумуляторов энергии в силу их ограниченности и конечности ее запасов; вторая - энергопитание от автономных источников типа двигателей внутреннего сгорания неосуществимо, потому что рабочая среда в трубопроводе может быть жидкой или бескислородной газовой.
Известны поршни-разделители типа ОПР-М-Э, ПР («Очистка и испытания магистральных трубопроводов», Е.М.Климовский, Ю.В.Колотилов. - Москва: Недра, 1987), содержащие корпус и закрепленные на нем герметизирующие элементы из эластомеров. Перемещение поршней-разделителей по трубопроводу осуществляют тем, что создают на них перепад давления рабочей среды воздействием потока ее, который подают в начале обследуемого участка магистрального трубопровода от внешнего источника к поршню-разделителю, при открытом конце участка, при этом усилие, создаваемое перепадом давления, приложено к поршню-разделителю и перемещает его по трубопроводу.
Недостатком устройства является большая неконтролируемая и никак не корректируемая неравномерность скорости его перемещения: на спуске трубопровода по рельефу местности возможны ускорения или рывок поршня-разделителя, на подъеме - замедление или остановка его, на горизонтальном участке все эти явления возможны перед и за местом искажения правильной геометрической формы сечения трубы, даже в пределах допустимой нормы. Это самым серьезным образом может отразиться, например, на точности, качестве и эффективности работы контролирующего и диагностирующего состояние трубопровода аппарата, буксируемого в нем поршнем-разделителем.
Недостатком устройства является большая сила трения герметизирующих устройств о поверхность трубопровода, что приводит к необходимости значительного повышения давления рабочей среды перед поршнем-разделителем.
Известен поршень-разделитель, используемый при заполнении полости магистрального трубопровода водой (SU, а.с. №1427148, F17D 5/02, 30.09.1988), содержащий внешний источник жидкой рабочей среды, однонаправленный скребок, включающий корпус с герметизирующими манжетами, и устройство согласования скорости перемещения поршня-разделителя со скоростью поступления потока рабочей среды.
Перемещение поршня-разделителя в трубопроводе осуществляют тем, что от внешнего источника в начале обследуемого участка подают поток жидкой рабочей среды к поршню-разделителю, при открытом конце участка, воздействием потока создают перепад давления рабочей среды на скребке и также создают тормозящее усилие на устройстве согласования скорости относительно трубопровода, которое заранее настраивают на заданную максимальную величину в зависимости от рельефа местности, по которой проложен трубопровод, с тем, чтобы уравнять скорость перемещения поршня-разделителя со скоростью поступления потока рабочей среды, путем регулирования величины тормозящего усилия в пределах заданной максимальной величины. Усилие, создаваемое перепадом давления, приложено к поршню-разделителю и перемещает его по трубопроводу.
Недостатками поршня-разделителя являются:
- отсутствие контроля скорости перемещения поршня-разделителя и средств на нем для корректирования скорости;
- невозможность применения поршня-разделителя в газовой рабочей среде;
- неравномерность скорости перемещения, обусловленная нестабильностью величины силы трения тормозных башмаков устройства согласования скорости о поверхность трубопровода.
Известен внутритрубный транспортный снаряд (RU, патент №2369454, B08B 9/055, 10.10.2009 г.), содержащий передние и задние центрирующие колеса с пружинными механизмами и гидроприводами прижатия их к поверхности магистрального трубопровода и гидросистему, состоящую из гидробака, гидроаккумуляторов, гидронасоса с приводом через цепные передачи от задних центрирующих колес, теплообменника, блока электрогидроаппаратуры управления гидросистемой, гидроцилиндров прижатия к поверхности трубопровода башмаков, устройства согласования скорости, при этом снаряд содержит также микропроцессор, управляющий им через электросистему, состоящую из электрогенератора с приводом через цепную передачу от заднего центрирующего колеса, электроаккумулятора, блока управления, датчиков скорости и давления. Работу снаряда осуществляют подачей, от внешнего источника потока воздуха или газа к снаряду, перемещением снаряда, создаваемым на нем потоком перепадом давлений и созданием тормозящего усилия на снаряде, величина которого зависит от характеристики рельефа местности. Величину скорости перемещения снаряда контролируют и, в случае отклонения ее от заданной, корректируют путем изменения величины тормозящего усилия. Для этого часть энергии потока преобразуют в гидравлический и электрический виды энергии, которые используют для создания тормозящего усилия. Давление потока рабочей среды заранее задают в зависимости от рельефа местности. Снаряд содержит корпус с герметизирующей манжетой из эластомера и устройство согласования скорости.
Недостатками снаряда являются:
- сложность трансмиссий, связывающих задние центрирующие колеса с преобразователями механической энергии в электрическую и гидравлическую формы;
- нерациональность конструктивного решения, использующего передние центрирующие колеса только для поддержания снаряда в осесимметричном положении относительно трубы;
- неуправляемость силы трения манжеты о стенки трубы.
Известен запирающий эластичный герметизирующий элемент в виде (SU, а.с. №1732109, F16L 55/18, 01.06.92) резинотканевой армированной оболочки, снабженной пружинно-кордным формообразователем, связанным канатами с устройством.
Недостатками элемента являются:
- наличие тканевой основы оболочки, огранивающей ее упругие свойства;
- наличие корда в формообразователе, ограничивающего его упругие свойства.
Известен движитель для перемещения внутри трубы (SU, а.с. №951796, F16L 55/00, B08B 9/04, 15.12.1984), включающий корпус с приводом, подпружиненные стабилизирующие ролики, ротор, содержащий связанный с приводом приводной вал с установленными на нем, с возможностью вращения, под углом их диаметральной плоскости к оси трубы, отличающимся от 90°, фрикционными роликами, которые установлены на втулках, в свою очередь, установленных на роторе, дисбалансы.
Работу движителя осуществляют вращением ротора приводом, при этом фрикционные ролики обкатываются по поверхности трубы по винтовой линии и поступательно перемещают движитель по трубе, чему способствуют стабилизирующие ролики, гасящие реактивный момент ротора и центрирующие корпус относительно трубы.
Движитель имеет ряд недостатков:
- неприменим в магистральных трубопроводах из-за ограниченности величины запаса энергии для привода;
- наличие вращающихся дисбалансов генерирует вибрацию самого движителя и трубы, что при буксировании контрольно-диагностического аппарата крайне негативно скажется на его работе;
- неуравновешенность вращающихся дисбалансов приводит к циклической неравномерности нагрузки на привод, что значительно ограничивает его ресурс.
Движитель по технической сущности и достигаемым техническим результатам наиболее близок к заявляемому изобретению.
Технической задачей изобретения является конструкция внутритрубного буксировщика для магистрального трубопровода, имеющего несложное устройство, небольшой вес, простую систему управления и способ перемещения его в магистральном трубопроводе, создающие благоприятные условия для стабильной работы внешнего источника рабочей среды и для надежной работы контрольно-диагностического аппарата и обеспечивающие осуществление им контроля и диагностирования состояния магистрального трубопровода с высоким качеством, точностью и эффективностью в газовой рабочей среде путем обеспечения заданной равномерной скорости перемещения аппарата в трубопроводе, буксируемого внутритрубным буксировщиком, с наименьшими потерями энергии потока рабочей среды.
Техническая задача по внутритрубному буксировщику для магистрального трубопровода, содержащему корпус с приводом, ротор спереди корпуса с приводным валом, связанным с приводом, подпружиненные стабилизирующие ролики и фрикционные ролики, установленные на роторе под углом к оси трубы, отличающимся от 90°, дисбалансы, втулки, решается согласно изобретению тем, что буксировщик включает второй, задний, ротор с приводным валом, установленный с заднего конца корпуса и имеющий вращение в противоположном переднему направлении, функцию стабилизирующих роликов выполняют фрикционные ролики, выполненные в виде подпружиненных обрезиненных колес в количестве не менее трех на один ротор, с возможностью их поворота в пределах 15÷75° угла α между осью трубы и их диаметральной плоскостью, являющихся поворотными дисбалансами относительно приводного вала и установленных на флюгерных лафетах, закрепленных полуосью во втулках на роторе, причем ось поворота лафета вынесена вперед по ходу обкатывания колеса по трубе на расстояние Z от оси колеса, при этом на корпусе закреплен эластичный герметизирующий, в виде усеченного полого тонкостенного конуса, элемент из армированного косоугольной сеткой эластомера, оснащенный по свободному краю формообразователем из эластомера, армированного пружинным кольцом из зигзагообразно изогнутой по длине стальной ленты, скрепленной канатами с корпусом, а элемент подперт спереди двумя разновеликими по высоте и толщине полыми усеченными конусами из эластомера.
Кроме того, решается вопрос тем, что на приводе, в виде мультипликатора с двумя выходными валами разнонаправленного вращения, связанных каждый, как единое целое, с соответствующими приводными валами роторов, установлен мотор-генератор с датчиком скорости вращения, в корпусе размещены электросистема с электроаккумулятором и утилизатором, с блоком управления, микропроцессор, связанный с датчиком скорости вращении и датчиками угла поворота лафета.
Вопрос решается также тем, что пружинное кольцо, армирующее формообразователь, связано канатами через блок с механизмом разгрузки, состоящим из корзины с прорезями, установленной на передней стенке корпуса, регулировочной гайки, радиально-упорного и упорного подшипников, пружины сжатия, подвижного по оси шпоночного сопряжения выходного вала привода и полого приводного вала переднего ротора с грибком на конце, сопрягаемого с пружиной и одноплечими рычагами, запасованными в прорези корзины и скрепленными, с возможностью регулировки напряжения, концами канатов. При этом на приводе, в виде мультипликатора с двумя выходными валами разнонаправленного вращения, связанными: передний - через подвижное по оси шпоночное сопряжение, задний - как единое целое, с соответствующими приводными валами роторов; установлен мотор-генератор с датчиком скорости вращения, в корпусе размещены электросистема с электроаккумулятором и утилизатором, с блоком управления, микропроцессор, связанный с датчиком скорости вращения и датчиками угла поворота лафета.
Кроме прочего вопрос решается тем, что буксировщик включает в качестве привода два, передний и задний, мультипликатора, каждый в комплексе с мотор-генератором, валы которых механически между собой связаны синхронизатором, в виде цилиндрического редуктора с разнонаправленными вращениями валов входа и выхода и передаточным отношением, равным единице, причем выходные валы мультипликаторов связаны каждый как единое целое с соответствующими приводными валами роторов, на синхронизаторе установлен датчик скорости вращения, в корпусе размещены электросистема с электроаккумулятором и утилизатором, с блоком управления, микропроцессор, связанный с датчиком скорости вращения и датчиками угла поворота лафета.
Также вопрос решается тем, что на мотор-генераторы мультипликаторов, переднего и заднего, установлены по датчику скорости вращения, связанных с микропроцессором, причем выходные валы мультипликаторов связаны как единое целое с соответствующими приводными валами роторов, в корпусе размещены электросистема с электроаккумулятором и утилизатором, с блоком управления, микропроцессор, связанный с датчиками скорости вращения и датчиками угла поворота лафета.
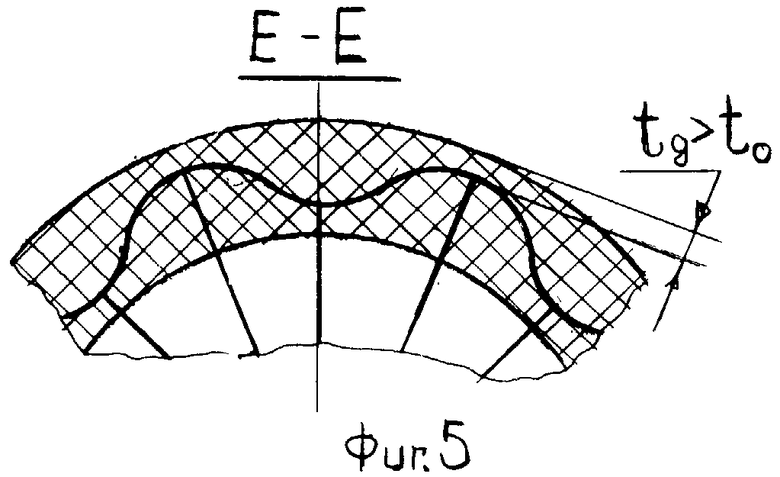
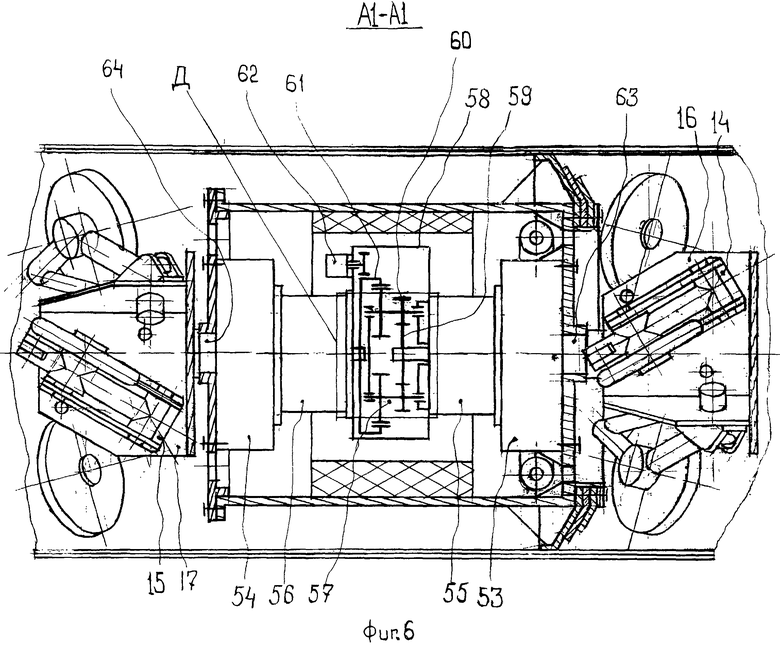
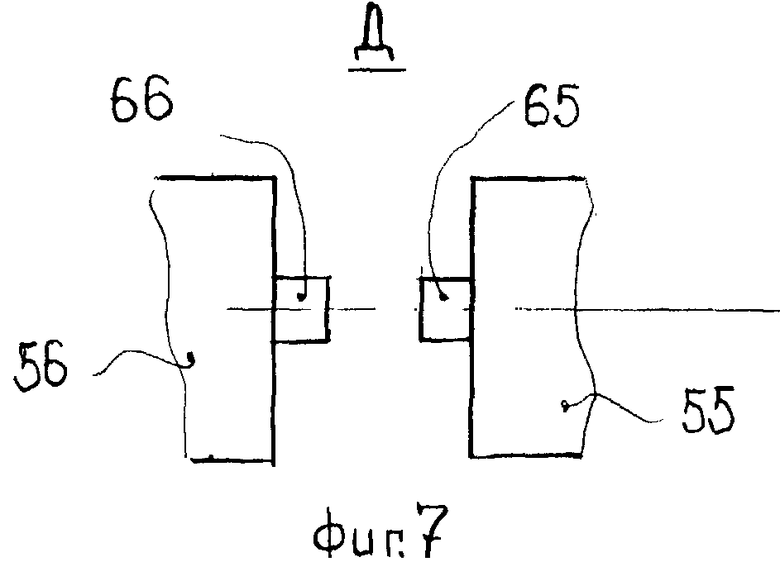
Сущность изобретения поясняется чертежами: фиг.1 - сечение А-А, общий вид; фиг.2 - сечение Б-Б; фиг.3 - выноска В с фиг.1; фиг.4 - сечение Г-Г; фиг.5 - сечение Е-Е; фиг.6 - сечение А1-А1; фиг.7 - выноска Д с фиг.6.
Внутритрубный буксировщик для магистрального трубопровода (в дальнейшем тексте «Буксировщик») (см. фиг.1, 2) по I варианту исполнения включает корпус 1 с приводом в виде мультипликатора 2 с двумя выходными валами: задним 3 и передним 4, по направлению движения буксировщика, разнонаправленного вращения. На мультипликаторе 2 установлен мотор-генератор 5 с датчиком 6 скорости вращения. В корпусе 1 размещены электросистема 7 с электроаккумулятором 8 и утилизатором тепла 9, блок управления 10 с микропроцессором 11, связанным с датчиком 6 скорости вращения и датчиками 12, 13 угла поворота лафетов 14, 15 каждого ротора: переднего 16 и заднего 17 по ходу движения буксировщика. Утилизатор 9 выполнен в виде оребренного ТЭНа, установленного в дефлекторе 18 перед отверстиями 19 в передней стенке 20 корпуса 1. В задней стенке 21 корпуса 1 выполнены вентиляционные отверстия 22. Через эти отверстия 19 и 22 вентилируется полость корпуса 1 со всем оборудованием и утилизатор 9. На передней стенке 20 корпуса 1 закреплен эластичный герметизирующий элемент 23, в виде усеченного полого тонкостенного конуса из армированного косоугольнй сеткой эластомера, по свободному краю оснащенный формообразователем 24 из эластомера, армированного пружинным кольцом 25 из зигзагообразно изогнутой по длине стальной ленты, скрепленной канатами 26 с корпусом 1. Армирование косоугольной сеткой не ограничивает упругие свойства эластомера в любом направлении, но предотвращает дальнейшее развитие его локального разрушения. Зигзагообразная форма пружинного кольца 25 значительно снижает величину радиального усилия, необходимого для радиальной деформации формообразователя 24, при этом его наружная поверхность, сопрягаемая с поверхностью трубопровода, сохраняет адекватность форме трубы. См. фиг.4 - формообразователь 24 до деформации, фиг.5 - после деформации. Элемент 23 спереди подперт разновеликими по высоте усеченными конусам и 27 и 28 из эластомера, средний из них 27 имеет большую высоту и меньшую толщину, крайний же 28 имеет меньшую высоту и большую толщину.
Формообразователь 24 прижат силами упругости кольца 25 и давлением рабочей среды к поверхности трубопровода 29, что обеспечивает герметичность сопряжения. Канаты 26 и конусы 27, 28 препятствуют выворачиванию элемента 23 вперед воздействием перепада давлений рабочей среды на нем, но не оказывают большого сопротивления при прохождении формообразователем 24 и элементом 23 препятствий на поверхности трубопровода 29. Роторы 16 и 17 включают приводные валы 30, 31, связанные заодно, каждый как единое целое, с соответствующими выходными валами 3, 4 мультипликатора 2. Связанные заодно, как единое целое, нужно понимать, как связь двух отдельных узлов с возможностью передачи крутящего и изгибающего моментов усилия по оси от одного узла к другому. Например, связанных муфтами: втулочной со штифтами или открытой фланцевой. На свободных концах валов 30, 31 имеются центральные резьбовые отверстия 32 для установки в них сцепных буксировочных устройств. На роторах 16 и 17 установлены флюгерные лафеты 14, 15 закрепленные их полуосью 33 во втулках 34, на которых установлены датчики 12, 13 угла поворота α лафетов 14, 15 по одному на ротор 16, 17. На лафетах 14, 15 установлены на поворотных наклонных стойках 35 обрезиненные колеса 36, поджатые к поверхности трубопровода 29 пружинными телескопическими цилиндрами 37 и центробежными силами при вращении роторов 16, 17, поскольку колеса 36 являются поворотными дисбалансами относительно валов 30 и 31. Колеса 36 центрируют корпус 1 относительно оси трубопровода 29. Ось поворота лафетов 14, 15 вынесена вперед по ходу обкатывания колес 36 по поверхности трубопровода 29 на расстояние Z от оси колеса 36, что обеспечивает флюгерный эффект поворота лафетов 14, 15 в пределах от 15 до 75° угла α между осью трубы 29 и диаметральной плоскостью колеса 36. Поворот лафетов 14, 15 ограничен в крайних положениях упорами 39, 40. Роторы 16 и 17 вращаются в противоположных направлениях, что позволяет взаимно гасить их реактивные моменты и сохранять стабильное угловое положение буксировщика.
Наличие на роторах 16 и 17 минимум по три колеса 36 является стабилизирующим фактором положения буксировщика по оси трубы 29.
Буксировщик по II варианту исполнения дополнительно к I варианту (см. фиг.3) включает механизм 41 разгрузки, состоящий из корзины 42, закрепленной на передней стенке 20 корпуса 1, с регулировочной гайкой 43, пружины сжатия 44, упорного подшипника 45, радиально-упорного подшипника 46, подвижного по оси шпоночного соединения выходного вала 4 мультипликатора 2 и полого вала 47, выполненного из приводного вала 31 переднего ротора 17, на конце полого вала 47 закреплен грибок 48, сопрягаемый с одноплечными рычагами 49, запасованными в прорези 50 корзины 42. Пружина 44 с упором в гайку 43 поджимает вал 47, а с ним ротор 17 через подшипник 45 к передней стенке 20 корпуса 1. Канаты 26 через блоки 51 и отверстия 19 скреплены с рычагами 49 регулировочными узлами 52 для коррекции натяжения канатов 26.
Буксировщик по III варианту исполнения в отличие от I и II вариантов (см. фиг.6) включает в качестве привода два, передний и задний мультипликаторы 53, 54 с мотор-генераторами 55, 56, валы которых кинематически связаны синхронизатором 57 в виде цилиндрического редуктора, состоящего из корпуса 58, центрального зубчатого колеса 59, промежуточных блоков шестерен 60 центрального колеса 61 с внутренними зубьями, а также датчика скорости вращения 62, связанного с микропроцессором 11. Выходные валы 63, 64 мультипликаторов 53, 54 связаны заодно, как единое целое с соответствующими приводными валами роторов 16, 17. Передаточное отношение синхронизатора 57 равно единице. Направление вращения валов 63, 64 противоположное.
Буксировщик по IV варианту исполнения (см. фиг.7) в отличие от III варианта не имеет кинематической связи между мотор-генераторами 55, 56, на которых установлены датчики 65, 66 скорости вращения. Связь между мотор-генераторами 55, 56, согласующая их работу - электрическая через электросистему 7 и блок управления 10 с микропроцессором 11, связанного с датчиками 64, 65 скорости вращения.
Работу буксировщика осуществляют следующим образом: в магистральный трубопровод 29 с заранее запасованным в него буксировщиком I варианта исполнения от внешнего источника подают поток рабочей среды: газ или воздух, с постоянными, заранее заданными давлением и расходом потока, соответствующими заданным скорости перемещения, длине и профилю участка обследования, емкости электроаккумулятора 8. В микропроцессор 11 закладывается программа управления буксировщиком: величина скорости перемещения в пути и режим торможения в конце участка перед камерой приема. Перепад давления рабочей среды на буксировщике создает усилие, перемещающее его. Колеса 36, прижатые пружинными телескопическими цилиндрами 37 к поверхности трубопровода 29, под воздействием силы реакции с его стороны флюгерно разворачивают лафеты 14, 15 на минимальную величину угла α 15°. Колеса 36 обкатываются по винтовой линии по поверхности трубопровода 29 и вращают роторы 16 и 17 каждый в своем противоположном другому направлении со скоростью вращения:
 ,
,
где Vo - заданная скорость перемещения буксировщика;
D и t - диаметр и толщина стенки трубопровода.
Роторы 16 и 17 приводят во вращение мультипликатор 2, а через него якорь мотора-генератора 5 со скоростью n1 МГ=2n1·i, где
n1 МГ - скорость вращения якоря мотор-генератора 5;
i - передаточное отношение мультипликатора 2.
Блок управления 10 электросистемы в генераторном режиме 7 начинает заряжать электроаккумулятор 8, если он разряжен. По показаниям датчика 6 скорости вращения и датчиков 12, 13 угла поворота лафетов 14, 15 микропроцессор 11 высчитывает скорость и величину перемещения буксировщика и если скорость превышает заданную Vo, например, на спусках наклонных участков трубопровода 29, то дает команду блоку управления 10 увеличить нагрузку на мотор-генератор 5 и направить излишнюю электроэнергию в утилизатор тепла 9. В противном случае нагрузку на мотор-генератор 5 снижают, при заряженном электроаккумуляторе 8 в случае подъема буксировщика по наклонному участку трубопровода 29 или преодолении препятствий и узостей, когда энергии потока рабочей среды не хватает для преодоления отставания скорости буксировщика от заданной Vo, микропроцессор 11 дает команду блоку управления 10 подать накопленную электроаккумулятором 8 электроэнергию на мотор-генератор 5 для вращения роторов 16, 17 со скоростью -  , где αх - промежуточный угол поворота лафетов 14, 15. Этот режим работы является двигательным.
, где αх - промежуточный угол поворота лафетов 14, 15. Этот режим работы является двигательным.
При угле αх - устанавливается как на флюгере равновесие сил, перемещающих буксировщик, воздействие потока рабочие среды и воздействие колес 36 на поверхность трубопровода 29, при соблюдении условия равенства скорости буксировщика заданной Vo. В крайнем случае αх=75°, скорость вращения ротора мотора-генератора 5 должна быть  , то есть должна увеличиться в 14 раз по сравнению n1 МГ, поэтому потребен мотор-генератор 5 со значительной глубиной регулирования скорости и достаточной мощностью при снижении скорости вращения до n1 МГ.
, то есть должна увеличиться в 14 раз по сравнению n1 МГ, поэтому потребен мотор-генератор 5 со значительной глубиной регулирования скорости и достаточной мощностью при снижении скорости вращения до n1 МГ.
Возможно допустить снижение скорости перемещения буксировщика от заданной Vo, но сохранить плавность ее изменения, что возможно только при необходимом быстродействии микропроцессора 11, блока управления 10, электросистемы 8. Это крайне важно при буксировании контрольно-диагностического аппарата. Можно ограничить диапазон изменения угла α до величин 30÷60°, что дает в итоге необходимость увеличивать скорость вращения ротора мотора-генератора 5 в 3 раза.
Работу буксировщика по II варианту исполнения осуществляют в дополнение к работе буксировщика I варианта исполнения следующим образом: при включении двигательного режима работы буксировщика передний ротор 16 сдвигается вперед, сжимая пружину 49 механизма 41 разгрузки, и канатами 26 отжимает в пределах упругости эластомера формообразователь 24 от поверхности трубопровода 29, вплоть до исчезновения силы трения об поверхность трубопровода 29. Сила сопротивления буксировщика перемещению падает, пружина 49 сдвигает корпус 1 вперед и сила прижатия формообразователя 24 к поверхности трубопровода 29 возрастает. В итоге устанавливается оптимальный равновесный режим прижатия. Благодаря работе механизма разгрузки 41 экономится энергия потока рабочей среды, запас энергии электроаккумулятора 8, расширяются возможности буксировщика.
Работу буксировщика по III и IV вариантов исполнения осуществляют аналогично I варианту исполнения, за исключением того, что дополнительно согласовывают работу мотор-генераторов 55, 56: по III варианту кинематически синхронизатором 57, а по IV варианту микропроцессором 11 изменяют количество оборотов (импульсов сигналов измерения) в единицу времени роторов каждого из датчиков 65, 66 скорости вращения, сравнивают результаты вычисления и в случае неравенства, блоком управления 10 через электросистему 7 выравнивают скорости вращения мотор-генераторов 55, 56.
Возможно применение буксировщика для доставки технологического устройства в определенную точку трубопровода 29, например, для ремонта его изнутри или снятия грата значительной величины с корня шва стыка труб. Для этого закладывается нужная программа в микропроцессор 11 и программа снижения энергии потока в блок управления внешнего источника рабочей среды по сигналу при подходе буксировщика к выбранному участку. Микропроцессор 11 не только вычисляет скорость перемещения буксировщика, постоянно сравнивая ее с заданной, но и величину пути им пройденного. Последний отрезок пути до точки после подачи сигнала с буксировщика с командой о включении программы снижения энергии потока, буксировщик пройдет на заранее заготовленном по программе запасе эл. энергии в двигательном режиме работы, произведет поиск заданной точки, где блок управления 10 включает по команде микропроцессора 11 штатный тормоз мотор-генератора 5 и останавливает буксировщик. Сигнал может быть акустическим импульсом с буксировщика, посылаемым соответствующим устройством, или электромагнитным сигналом с реперного, контролирующего прохождение буксировщика, пункта, установленного заранее на заданном расстоянии перед определенной точкой магистрального трубопровода. Для этого требуется электроаккумулятор 8 достаточно большой емкости. Это вполне реально, учитывая наличие хотя и сниженного давления рабочей среды. По сигналу технологического устройства соответствующее его оборудование по окончании работы подает, например, акустический импульс, с командой о возобновлении рабочего режима работы внешнего источника рабочей среды и перемещении буксировщика. Он растормаживается и продолжает рабочий режим. Аналогичным способом останавливают буксировщик в камере приема.
Использование предлагаемого изобретения позволит создать достаточно простой по конструкции буксировщик с широкими возможностями применения, с незначительной силой сопротивления перемещению по сравнению с аналогичными устройствами, где используется манжеты из эластомера широко используемой в практике конструкции, с возможностью легко проходить все препятствия и узости современных магистральных трубопроводов. Также буксировщик значительно экономит энергию потока рабочей среды, обеспечивает плавное изменение скорости перемещения в заданных пределах, доставку технологических устройств в заданную точку магистральных трубопроводов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕМЕЩЕНИЯ ВНУТРИТРУБНОГО ТРАНСПОРТНОГО СНАРЯДА В МАГИСТРАЛЬНОМ ТРУБОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2393379C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ВНУТРИТРУБНОГО ТРАНСПОРТНОГО СНАРЯДА В МАГИСТРАЛЬНОМ ТРУБОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2369454C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ВНУТРИТРУБНОГО ТРАНСПОРТНОГО СНАРЯДА В МАГИСТРАЛЬНОМ ТРУБОПРОВОДЕ С ПЛАВНО ИЗМЕНЯЮЩЕЙСЯ В ЗАДАННЫХ ПРЕДЕЛАХ СКОРОСТЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2393931C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО И СПОСОБ ПЕРЕМЕЩЕНИЯ ЕГО В МАГИСТРАЛЬНОМ ТРУБОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ | 2007 |
|
RU2334563C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ВНУТРИТРУБНОГО УСТРОЙСТВА В ТЕХНОЛОГИЧЕСКОМ ТРУБОПРОВОДЕ | 2015 |
|
RU2596681C1 |
| АППАРАТ ВНУТРИТРУБНОГО КОНТРОЛЯ И СПОСОБ ПЕРЕМЕЩЕНИЯ ЕГО В МАГИСТРАЛЬНОМ ГАЗОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ | 2010 |
|
RU2451867C2 |
| Способ проведения внутритрубной диагностики в подвижной жидкостной пробке | 2017 |
|
RU2650621C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО С АВТОНОМНЫМ ИСТОЧНИКОМ ЭЛЕКТРОЭНЕРГИИ | 2005 |
|
RU2300046C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2015 |
|
RU2581757C1 |
| АДАПТИВНАЯ КОЛЕСНАЯ ОПОРА ТРАНСПОРТНОГО МОДУЛЯ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2023 |
|
RU2821671C1 |
Внутритрубный буксировщик для магистральных трубопроводов относится к области строительства и эксплуатации магистральных трубопроводов. Внутритрубный буксировщик для магистральных трубопроводов включает корпус с приводом, электросистему с электроаккумулятором, блок управления с микропроцессором, мотор-генератор с датчиком скорости вращения, утилизатор тепла. Приводом является мультипликатор с двумя выходными валами разнонаправленного вращения, выполненными каждый как единое целое с соответствующими приводными валами роторов: передним и задним, с поворотными лафетами, установленными в виде флюгеров на каждом роторе в количестве не менее трех. На каждом лафете на поворотных наклонных стойках установлены обрезиненные колеса, поджатые к поверхности трубопровода пружинными телескопическими цилиндрами и центробежными силами при вращении роторов. Колеса установлены наклонно: диаметральной плоскостью под углом α=15-75° к оси трубопровода, так что при движении обкатываются по поверхности трубопровода по винтовой линии: в генераторном режиме при α=15° вращают роторы и мотор-генератор, в двигательном - при α=75° перемещают буксировщик. На корпусе установлен эластичный герметизирующий элемент в виде полого тонкостенного усеченного конуса из армированного косоугольной сеткой эластомера. Технический результат - повышение надежности устройства, способность перемещаться с плавно изменяемой скоростью в заданных пределах ее величины, экономить энергию потока и доставлять буксируемое технологическое оборудование в заданную точку магистрального трубопровода. 4 н. и 4 з.п. ф-лы, 7 ил.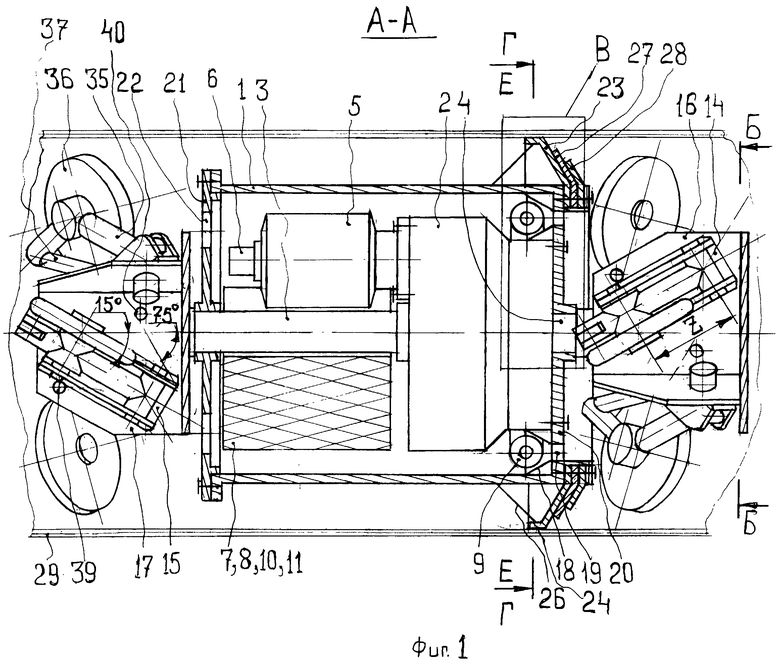
1. Внутритрубный буксировщик для магистрального трубопровода, содержащий корпус с приводом, ротор спереди корпуса с приводным валом, связанным с приводом, подпружиненные стабилизирующие ролики и фрикционные ролики, установленные на роторе под углом к оси трубы, отличающимся от 90°, дисбалансы, втулки, отличающийся тем, что буксировщик включает второй, задний, ротор с приводным валом, установленный с заднего конца корпуса и имеющий вращение в противоположном переднему направлении, функцию стабилизирующих роликов выполняют фрикционные ролики, выполненные в виде подпружиненных обрезиненных колес в количестве не менее трех на один ротор, с возможностью их поворота в пределах 15÷75° угла α между осью трубы и их диаметральной плоскостью, являющихся поворотными дисбалансами относительно приводного вала и установленных на флюгерных лафетах, закрепленных полуосью во втулках на роторе, причем ось поворота лафета вынесена вперед по ходу обкатывания колеса по трубе на расстояние Z от оси колеса, при этом на корпусе закреплен эластичный герметизирующий, в виде усеченного полого, тонкостенного, конуса, элемент из армированного косоугольной сеткой эластомера, оснащенный по свободному краю формообразователем из эластомера, армированным пружинным кольцом из зигзагообразно изогнутой по длине стальной ленты, скрепленной канатами с корпусом, а элемент подперт спереди двумя разновеликими по высоте и толщине полыми усеченными конусами из эластомера.
2. Внутритрубный буксировщик для магистрального трубопровода по п.1, отличающийся тем, что на приводе, в виде мультипликатора с двумя выходными валами разнонаправленного вращения, связанных каждый, как единое целое, с соответствующими приводными валами роторов, установлен мотор-генератор с датчиком скорости вращения, в корпусе размещены электросистема с электроаккумулятором и утилизатором, с блоком управления, микропроцессор, связанный с датчиком скорости вращения и датчиками угла поворота лафета.
3. Внутритрубный буксировщик для магистрального трубопровода, содержащий корпус с приводом, ротор спереди корпуса с приводным валом, связанным с приводом, подпружиненные стабилизирующие ролики и фрикционные ролики, установленные на роторе под углом к оси трубы, отличающимся от 90°, дисбалансы, втулки, отличающийся тем, что буксировщик включает второй, задний, ротор с приводным валом, установленный с заднего конца корпуса и имеющий вращение в противоположном переднему направлении, функцию стабилизирующих роликов выполняют фрикционные ролики, выполненные в виде подпружиненных обрезиненных колес в количестве не менее трех на один ротор, с возможностью их поворота в пределах 15÷75° угла α между осью трубы и их диаметральной плоскостью, являющихся поворотными дисбалансами относительно приводного вала и установленных на флюгерных лафетах, закрепленных полуосью во втулках на роторе, причем ось поворота лафета вынесена вперед по ходу обкатывания колеса по трубе на расстояние Z от оси колеса, при этом на корпусе закреплен эластичный герметизирующий, в виде полого, тонкостенного, усеченного конуса, элемент из армированного косоугольной сеткой эластомера, подпертый спереди двумя разновеликими по высоте и толщине полыми усеченными конусами из эластомера и оснащенный по свободному краю формообразователем из эластомера, армированным пружинным кольцом из зигзагообразно изогнутой по длине стальной ленты, связанной канатами через блоки с механизмом разгрузки, состоящим из корзины с прорезями, установленной на передней стенке корпуса, регулировочной гайки, радиально-упорного и упорного подшипников, пружины сжатия, подвижного по оси шпоночного сопряжения выходного вала привода и полого приводного вала переднего ротора с грибком на конце, сопрягаемого с пружиной и одноплечими рычагами, запасованными в прорези корзины и скрепленными, с возможностью регулировки натяжения, концами канатов.
4. Внутритрубный буксировщик для магистрального трубопровода по п.3, отличающийся тем, что на приводе, в виде мультипликатора с двумя выходными валами разнонаправленного вращения, связанными: передний - через подвижное по оси шпоночное сопряжение, задний - как единое целое, с соответствующими приводными валами роторов; установлен мотор-генератор с датчиком скорости вращения, в корпусе размещены электросистема с электроаккумулятором и утилизатором, с блоком управления, микропроцессор, связанный с датчиком скорости вращения и датчиками угла поворота лафета.
5. Внутритрубный буксировщик для магистрального трубопровода, содержащий корпус с приводом, ротор спереди корпуса с приводным валом, связанным с приводом, подпружиненные стабилизирующие ролики и фрикционные ролики, установленные на роторе под углом к оси трубы, отличающимся от 90°, дисбалансы, втулки, отличающийся тем, что включает задний ротор с приводным валом, установленный с заднего конца корпуса и имеющий вращение в противоположном переднему направлении, функцию стабилизирующих роликов выполняют фрикционные ролики, выполненные в виде подпружиненных обрезиненных колес в количестве не менее трех на один ротор, с возможностью их поворота в пределах 15÷75° угла α между осью трубы и их диаметральной плоскостью, являющихся поворотными дисбалансами относительно приводного вала и установленных на флюгерных лафетах, закрепленных полуосью во втулках на роторе, причем ось поворота лафета вынесена вперед по ходу обкатывания колеса по трубе на расстояние Z от оси колеса, при этом на корпусе закреплен эластичный герметизирующий, в виде усеченного полого, тонкостенного, конуса, элемент из армированного косоугольной сеткой эластомера, оснащенный по свободному краю формообразователем из эластомера, армированным пружинным кольцом из зигзагообразно изогнутой по длине стальной ленты, скрепленной канатами с корпусом, а элемент подперт спереди двумя разновеликими по высоте и толщине полыми усеченными конусами из эластомера.
6. Внутритрубный буксировщик для магистрального трубопровода по п.5, отличающийся тем, что привод выполнен двумя, передним и задним, мультипликаторами с мотор-генераторами, валы которых связаны кинематически синхронизатором, в виде цилиндрического редуктора с противоположно направленными вращениями валов входа и выхода, с передаточным отношением равным единице, причем выходные валы мультипликаторов связаны, как единое целое, с соответствующими приводными валами роторов, причем на синхронизатор установлен датчик скорости вращения, в корпусе размещены электросистема с электроаккумулятором и утилизатором, с блоком управления, микропроцессор, связанный с датчиком скорости вращения и датчиками угла поворота лафета.
7. Внутритрубный буксировщик для магистрального трубопровода, содержащий корпус с приводом, ротор спереди корпуса с приводным валом, связанным с приводом, подпружиненные стабилизирующие ролики и фрикционные ролики, установленные на роторе под углом к оси трубы, отличающимся от 90°, дисбалансы, втулки, отличающийся тем, что включает задний ротор с приводным валом, установленный с заднего конца корпуса и имеющий вращение в противоположном переднему направлении, функцию стабилизирующих роликов выполняют фрикционные ролики, выполненные в виде подпружиненных обрезиненных колес в количестве не менее трех на один ротор, с возможностью их поворота в пределах 15÷75° угла α между осью трубы и их диаметральной плоскостью, являющихся поворотными дисбалансами относительно приводного вала и установленных на флюгерных лафетах, закрепленных полуосью во втулках на роторе, причем ось поворота лафета вынесена вперед по ходу обкатывания колеса по трубе на расстояние Z от оси колеса, при этом на корпусе закреплен эластичный герметизирующий, в виде усеченного полого, тонкостенного, конуса, элемент из армированного косоугольной сеткой эластомера, оснащенный по свободному краю формообразователем из эластомера, армированным пружинным кольцом из зигзагообразно изогнутой по длине стальной ленты, скрепленной канатами с корпусом, а элемент подперт спереди двумя разновеликими по высоте и толщине полыми усеченными конусами из эластомера.
8. Внутритрубный буксировщик для магистрального трубопровода по п.7, отличающийся тем, что привод выполнен двумя, передним и задним мультипликаторами с мотор-генераторами, оснащенными датчиками скорости вращения, причем выходные валы мультипликаторов связаны, как единое целое, с соответствующими приводными валами роторов, в корпусе размещены электросистема с электроаккумулятором и утилизатором, с блоком управления, микропроцессор, связанный с датчиками скорости вращения и датчиками угла поворота лафета.
| Самоходная установка для движения внутри трубопровода | 1983 |
|
SU1142186A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ГАЗОПРОВОДОМ | 2003 |
|
RU2241900C2 |
| Электронная или ионная лампа | 1933 |
|
SU43090A1 |
| МАГНИТОМЕТРИЧЕСКИЙ МОДУЛЬ ИЗМЕРИТЕЛЬНО-АНАЛИТИЧЕСКОГО КОМПЛЕКСА ДЛЯ ТЕСТИРОВАНИЯ ОТКРЫТЫХ МАГНИТНЫХ СИСТЕМ | 2006 |
|
RU2328754C2 |
| US 4654702 A, 31.03.1987. | |||

