ОБЛАСТЬ ТЕХНИКИ
Данное изобретение относится к электромагнитной системе слежения (EMTS) для медицинских устройств и, более конкретно, к системам и способам компенсации погрешности, обусловленной искажениями, вносимыми металлом, для точного слежения в медицинском оборудовании.
УРОВЕНЬ ТЕХНИКИ
Результаты минимально инвазивных медицинских процедур могут быть улучшены посредством использования электромагнитных систем слежения (EMTS) для отслеживания местоположения медицинских инструментов и отображения этой информации на изображениях для медицинских целей, чтобы облегчить направленное перемещение медицинского инструмента к целевому местоположению в человеческом теле. В EMTS, как правило, используется генератор электромагнитного поля для создания локального электромагнитного поля в месте выполнения процедуры, и медицинский инструмент или устройство, содержащие подходящую сенсорную катушку. В сенсорной катушке индуцируется электрический ток, который является функцией местоположения и ориентации сенсорной катушки по отношению к генератору электромагнитного поля. EMTS рассчитывает местоположение сенсорной катушки и, тем самым, местоположение медицинского инструмента, на основании индуцированного электрического тока. Особое преимущество EMTS заключается в том, что не требуется линия визирования для определения/контроля местоположения или перемещения инструмента, что делает такие системы особенно подходящими для слежения за иглами или катетерами внутри человеческого тела.
Одна из основных проблем, возникающих при использовании EMTS в медицинском оборудовании, связана с присутствием металлических электропроводных или ферромагнитных объектов поблизости от электромагнитного поля. Эти объекты создают искажения или металлические артефакты, которые приводят к ошибкам в местоположении и ориентации во время отслеживания медицинского(их) инструмента(ов). Стол или платформа, обеспечивающие выполнение медицинской процедуры, обычно являются основным источником искажений, вносимых металлом. Однако другие объекты, такие как подвижная рама компьютерного томографа (CT), рентгеновская или C-дуга, также могут вызвать искажения и/или способствовать им. Такие искажения и связанные с ними ошибки при определении/восприятии клиницистом местоположения инструмента могут непосредственным и негативным образом влиять на результаты медицинской процедуры при использовании EMTS. В настоящее время клиническая применимость EMTS ограничена, поскольку точность определения местоположения и ориентации посредством EMTS не может быть гарантирована при наличии искажений, вносимых металлом.
Патент США № 6400139, Khalfin et al., раскрывает способы/устройства для электромагнитного отслеживания местоположения и ориентации при возможности компенсации искажений. Более конкретно, патент Khalfin № 6400139 раскрывает способы/устройства, которые используют по меньшей мере один неподвижный датчик, называемый «опорным датчиком», который имеет фиксированное местоположение и ориентацию и расположен поблизости от объема, ответственного за электромагнитные искажения, или внутри него. Один или несколько измерительных датчиков размещаются на объекте, подлежащем отслеживанию, внутри указанного объема, и выходной сигнал каждого опорного датчика используется для расчета параметров мнимого источника эффективного электромагнитного поля. Параметры источника эффективного электромагнитного поля используются в качестве входных сигналов для расчета местоположения и ориентации, в соответствии с измерениями каждого измерительного датчика, как если бы объект находился в неискаженном электромагнитном поле, созданном источником или источниками эффективного поля.
Несмотря на усилия, предпринятые до настоящего времени, остается потребность в системах и способах, которые обеспечивают эффективную компенсацию искажений, вносимых металлом, и, тем самым, улучшают точность и/или достоверность EMTS в медицинском/клиническом оборудовании. Кроме того, остается потребность в системах/способах, которые улучшают рабочие характеристики EMTS таким образом, что обеспечивается эффективное и достоверное отслеживание катетера в кардиологических и васкулярных видах применения, онкологических видах применения, таких как пункционная биопсия, высокочастотная деструкция, криодеструкция, терапия рака предстательной железы и т.п. Эти и другие потребности удовлетворяются раскрытыми здесь системами и способами.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Данное изобретение направлено на системы и устройства для компенсации погрешности, обусловленной искажениями, вносимыми металлом, которые имеют место и/или с которыми встречаются при использовании электромагнитной системы слежения (EMTS), например, в медицинских и/или хирургических процедурах. В соответствии с типичным вариантом осуществления раскрытая в данном изобретении EMTS включает генератор электромагнитного поля, который предназначен для генерации электромагнитного поля. Генератор электромагнитного поля, как правило, приспособлен к расположению в медицинском/хирургическом/клиническом оборудовании таким образом, чтобы создаваемое им электромагнитное поле могло быть использовано для отслеживания воспринятых данных от электромагнитных датчиков и соответствующей электромагнитной сенсорной катушки (или нескольких катушек). Описанная сенсорная катушка (или нескольких катушек) обычно встроена в медицинское устройство или другую структуру/элемент в составе клинического оборудования, посредством чего обеспечивается отслеживание данных о местоположении и ориентации при расположении медицинского устройства или иной структуры, целиком или частично, в человеческом теле. Функциональная возможность компенсации погрешности создается средством для компенсации погрешности, объединенным с раскрытыми системой/способом, и создаваемая при этом компенсация погрешности применяется к данным о местоположении и ориентации для медицинского устройства или иной структуры для точного слежения. Скорректированная информация может быть отображена системой формирования изображений, сохранена в памяти компьютера и/или распечатана.
В соответствии с типичными вариантами осуществления данного изобретения раскрытый инструмент для коррекции погрешности включает несколько электромагнитных датчиков, зафиксированных при известной предварительно заданной геометрической конфигурации. Предпочтительно данный инструмент для коррекции погрешности расположен или ориентирован таким образом, чтобы окружать исследуемую локальную область, т.е. клиническую/анатомическую область, в которой выполняется медицинская, хирургическая и/или диагностическая процедура. В предпочтительном варианте осуществления оптический датчик слежения присоединен к инструменту для коррекции погрешности для повышения точности. На оптический датчик слежения, как правило, не влияют искажения, вносимые металлом, и его местоположение и ориентация являются фиксированными и известными по отношению к по меньшей мере одному электромагнитному датчику инструмента для коррекции погрешности.
В других типичных вариантах осуществления данного изобретения проблемы известных из уровня техники технических решений, связанных с EMTS, разрешаются посредством картирования искажений, что допускает свободное перемещение генератора и/или стола. Этот вариант осуществления использует оптическую систему слежения, которая предназначена для отслеживания данных о местоположении от оптических датчиков, связанных с генератором электромагнитного поля и столом, используемом при выполнении медицинской/хирургической процедуры. Позиционирующая система используется для перемещения датчика EMTS к разным местам расположения, чтобы содействовать картированию данных об искажениях. Это создает несколько возможных карт искажений для разных местоположений стола и генератора поля по отношению одного к другому. Таким образом, создается единственная всесторонняя карта, и, в соответствии с данным изобретением, последующие перемещения стола и/или генератора поля во время процедур и/или между ними не оказывают отрицательного влияния на достоверность и/или точность раскрытой EMTS. Более того, в соответствии с типичными вариантами осуществления данного изобретения предоставляется система формирования изображений, которая предназначена для отображения информации слежения для медицинского устройства или иной структуры, которая преимущественно скорректирована посредством картирования искажений.
Дополнительные отличительные признаки, функции и преимущества раскрытых систем и способов будут очевидны из представленного ниже описания, особенно при его рассмотрении в сочетании с прилагаемыми к нему чертежами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для содействия обычному специалисту в данной области в изготовлении и использовании раскрытых систем и способов сделаны ссылки на прилагаемые чертежи, среди которых:
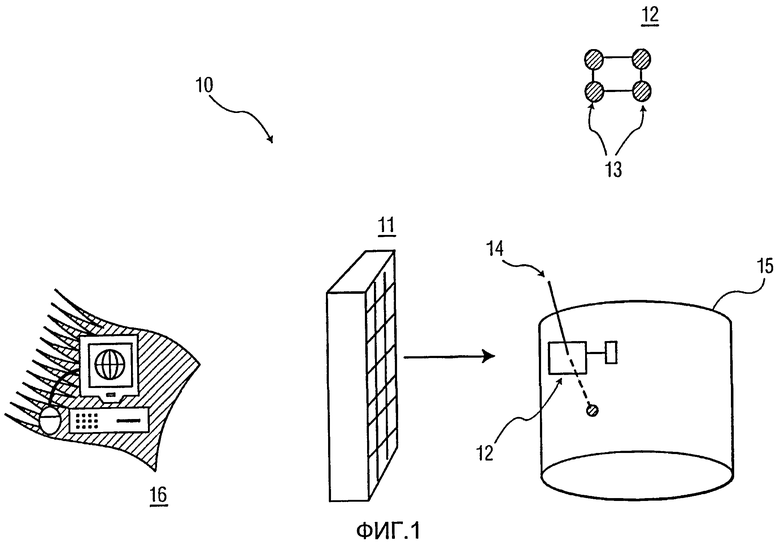
Фиг.1 представляет собой схематическое изображение первого типичного варианта осуществления данного изобретения;
Фиг.2 представляет собой схематическое изображение второго типичного варианта осуществления данного изобретения; и
Фиг.3 представляет собой схематическое изображение третьего типичного варианта осуществления данного изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ТИПИЧНОГО(ЫХ) ВАРИАНТА(ОВ) ОСУЩЕСТВЛЕНИЯ
Данное изобретение предоставляет полезные электромагнитные системы слежения (EMTS) для медицинских устройств и других структур. Раскрытые системы/способы предоставляют компенсацию погрешности, обусловленной искажениями, вносимыми металлом, посредством чего способствуют более точному отслеживанию таких устройств/структур в медицинском/хирургическом оборудовании. Посредством эффективной компенсации искажений, вносимых металлом, раскрытые устройства и способы повышают точность и/или достоверность EMTS в медицинском/клиническом оборудовании. Например, улучшенные характеристики EMTS обеспечивают эффективное и достоверное отслеживание катетера в кардиологических и васкулярных видах применения, онкологических видах применения, таких как пункционная биопсия, высокочастотная деструкция, криодеструкция, терапия рака предстательной железы и т.п.
Фиг.1 иллюстрирует электромагнитную систему 10 слежения (EMTS), имеющую генератор 11 электромагнитного поля. В первом варианте осуществления генератор 11 создает локальное электромагнитное поле, позволяющее отслеживать данные от электромагнитных датчиков 13 и медицинского устройства 14. Во время выполнения медицинской/хирургической процедуры устройство 14 обычно проникает внутрь человеческого тела 15 под кожу к целевому местоположению. Электромагнитная сенсорная катушка встроена в устройство 14. В сенсорной катушке индуцируется электрический ток, который является функцией местоположения и ориентации сенсорной катушки по отношению к генератору 11 электромагнитного поля. Сенсорная катушка обнаруживается посредством локального электромагнитного поля, создаваемого генератором 11. Данные от сенсорной катушки отображаются системой 16 формирования изображений. Система 16 формирования изображений может включать, однако не ограничиваясь ими, монитор с компьютером, типичным для медицинского оборудования. Эти данные состоят из местоположения и ориентации сенсорной катушки, соответственно могут быть определены местоположение и ориентация медицинского устройства 14. Медицинское устройство может быть иглой, катетером или любым устройством, перемещаемым внутри человеческого тела.
Инструмент 12 для коррекции погрешности, имеющий электромагнитные датчики 13, размещен поблизости от исследуемого места, обычно над местом выполнения медицинской процедуры. Посредством мониторинга данных о местоположении от датчиков 13 инструмента 12 для коррекции погрешности устанавливается корректирующая функция, которая применяется к данным о местоположении и ориентации сенсорной катушки. Соответственно, инструмент 12 для коррекции погрешности обеспечивает компенсацию локальной погрешности, обусловленной искажениями, вносимыми металлом, имеющимся в оборудовании. Эти искажения обычны для компьютерных томографов, рентгеновского и ультразвукового оборудования.
Инструмент 12 для коррекции погрешности обычно имеет несколько электромагнитных датчиков, расположенных в виде фиксированной и известной геометрической конфигурации. На Фиг.1, например, показаны четыре датчика, расположенных в виде квадрата. В типичном варианте осуществления электромагнитные датчики могут быть расположены в виде квадрата 10 см на 10 см. В альтернативной типичной конфигурации лишь три датчика располагаются в виде треугольника известных размеров. В предпочтительном варианте осуществления точные местоположения одного датчика по отношению к другим датчикам должны быть известны. Особенно подходит расположение датчиков таким образом, чтобы место, представляющее интерес для выполнения процедуры, могло быть окружено датчиками.
В соответствии с типичными вариантами осуществления раскрытых устройств и способов считывания данных о местоположении выполняются от датчиков 13, когда инструмент 12 расположен в поле действия генератора 11. Если присутствуют искажения, вносимые металлом (и отсутствуют функциональные возможности коррекции, раскрытые в этом документе), то местоположение одного или нескольких датчиков будет определено некорректно, и EMTS 10 не будет правильно распознавать/преобразовывать геометрическое расположение. Однако, поскольку относительные местоположения датчиков 13 являются фиксированными и известными в соответствии с данным изобретением, раскрытые устройства и способы способствуют коррекции данных, считываемых EMTS (т.е. устранению искажений), посредством чего обеспечивается выдача корректной геометрической информации. Эта коррекция может затем быть применена к считываемым данным о местоположении медицинского устройства 14, и, таким образом, локальное поле на указанном инструменте компенсируется в отношении погрешности, вызываемой искажениями, вносимыми металлом.
Хотя возможно выполнение коррекции погрешности единственно при использовании электромагнитных датчиков, погрешность может еще оставаться, поскольку абсолютные местоположения датчиков, считанные EMTS, неизвестны в присутствии искажений, вносимых металлом. В предпочтительном варианте осуществления данного изобретения средство для идентификации абсолютного местоположения по меньшей мере одного датчика делает возможным определение/установление абсолютного местоположения всех датчиков 23. Фиг.2 иллюстрирует типичный вариант осуществления, в котором оптический датчик 26 слежения прикреплен к инструменту 22 для коррекции погрешности. Оптический датчик 26 слежения находится, как правило, в фиксированном и известном местоположении по отношению к по меньшей мере одному электромагнитному датчику 23. Пространство оптического слежения и пространство электромагнитного слежения могут регистрироваться системой 27 формирования изображений, соответственно предоставляя эталонное положение (базу отсчета) для абсолютного местоположения для инструмента 22 коррекции погрешности. Система 27 формирования изображений может включать, однако не ограничиваясь ими, монитор с компьютером/центральным процессором, известными для использования в медицинском/хирургическом оборудовании. В этом предпочтительном варианте осуществления абсолютные местоположения электромагнитных датчиков 23 создают более точную функцию коррекции искажений для инструмента коррекции погрешности.
Фиг.2 схематически иллюстрирует EMTS 20, которая включает генератор 21 электромагнитного поля. В этом типичном варианте осуществления генератор 21 создает локальное электромагнитное поле, позволяющее отслеживать данные от электромагнитных датчиков 23 и медицинского устройства 24. Во время выполнения медицинской/хирургической процедуры медицинское устройство 24 обычно проникает внутрь человеческого тела 25 под кожу к целевому местоположению. Электромагнитная сенсорная катушка встроена в медицинское устройство 24. В сенсорной катушке индуцируется электрический ток, который является функцией местоположения и ориентации сенсорной катушки по отношению к генератору 21 электромагнитного поля. Сенсорная катушка обнаруживается посредством локального электромагнитного поля, создаваемого генератором 21. Данные от сенсорной катушки отображаются системой 27 формирования изображений. Эти данные состоят из местоположения и ориентации сенсорной катушки и, соответственно, местоположения и ориентации медицинского устройства 24. Медицинское устройство может быть иглой, катетером или любым устройством, перемещаемым внутри человеческого тела.
Инструмент 22 для коррекции погрешностей, который включает электромагнитные датчики 23, размещен поблизости от исследуемого места, обычно над местом выполнения медицинской процедуры. Посредством мониторинга данных о местоположении от датчиков 23 инструмента 22 для коррекции погрешности устанавливается корректирующая функция, которая применяется к данным о местоположении и ориентации сенсорной катушки, посредством чего обеспечивается компенсация локальной погрешности, обусловленной искажениями, вносимыми металлом, имеющимся в оборудовании. Эти искажения обычны для компьютерных томографов, рентгеновского и ультразвукового оборудования.
Инструмент 22 для коррекции погрешности обычно имеет несколько электромагнитных датчиков, расположенных в виде фиксированной и известной геометрической конфигурации. На Фиг.2, например, показаны четыре датчика, расположенных в виде квадрата. Как указано со ссылкой на вариант осуществления, представленный на Фиг.1, датчики могут быть расположены в виде квадрата 10 см на 10 см. В альтернативном варианте осуществления лишь три датчика располагаются в виде треугольника известных размеров. В предпочтительном варианте осуществления точные местоположения одного датчика по отношению к другим датчикам известны. Особенно подходит расположение датчиков таким образом, чтобы исследуемое место, для выполнения процедуры, могло быть окружено датчиками.
Данные о местоположении могут быть считаны с датчиков 23, когда инструмент 22 размещается в поле действия генератора 21. Если присутствуют искажения, вносимые металлом, то местоположение одного или нескольких датчиков будет определено некорректно, и EMTS 20 не будет правильно преобразовывать геометрическое расположение. Поскольку относительные местоположения датчиков 23 являются фиксированными и известными, то возможны устранения искажений и коррекция данных, считываемых EMTS, посредством чего обеспечивается выдача корректной геометрической информации. Эта коррекция может затем быть применена к считываемым данным о местоположении медицинского устройства 24, и, таким образом, локальное поле на указанном инструменте компенсируется в отношении погрешности, вызываемой искажениями, вносимыми металлом.
Фиг.3 иллюстрирует третий типичный вариант осуществления данного изобретения, в котором генератор 34 электромагнитного поля имеет по меньшей мере первый оптический датчик 35a слежения. Генератор 34 создает локальное электромагнитное поле, позволяющее отслеживать данные от электромагнитной сенсорной катушки, встроенной в медицинское устройство или другую структуру/элемент. В сенсорной катушке индуцируется электрический ток. Электрический ток является функцией местоположения и ориентации сенсорной катушки по отношению к генератору 34 электромагнитного поля. Данные от сенсорной катушки отображаются системой 36 формирования изображений. Система 36 формирования изображений может включать, однако не ограничиваясь ими, монитор с обычным компьютером/центральным процессором, который типично используется в медицинском/хирургическом оборудовании. Эти данные состоят из местоположения и ориентации сенсорной катушки, которые преобразуются в местоположение и ориентацию медицинского устройства. Медицинское устройство может быть иглой, катетером или любым устройством, перемещаемым внутри человеческого тела.
На фиг.3 представлен характерный пример стола 33, который может принимать форму типичной платформы, используемой для медицинских/хирургических процедур; примерами такого стола являются, однако без ограничения ими, стол для компьютерной томографии, стол для проведения процедур с использованием рентгеновского излучения или стол для проведения процедур с использованием ультразвука. Как указано ранее, оборудование для проведения медицинских процедур, включая стол 33, обычно создает искажения, вносимые металлом, которые изменяют точность обычной EMTS. Эти искажения успешно устраняются в соответствии с типичным вариантом осуществления, представленном на Фиг.3.
Как схематически изображено на Фиг.3, по меньшей мере второй оптический датчик слежения преимущественно присоединен к столу 33. Картирование электромагнитного поля достигается посредством использования позиционирующей системы 30, содержащей датчик 31 EMTS. В типичном варианте осуществления, представленном на Фиг.3, позиционирующая система 30 перемещается к разным местам расположения в пределах желательного пространственного объема, с которым связаны электромагнитный датчик 31, первый оптический датчик 35a и второй оптический датчик 35b. Для всех трех датчиков собираются данные о местоположении одного по отношению к другим, что предоставляет возможность и/или способствует картированию любых локальных искажений, вызванных локальным оборудованием, по отношению к разным известным положениям позиционирующей системы, генератора электромагнитного поля и стола.
Пригодная для практического применения компенсация искажений осуществляется в соответствии с типичными вариантами осуществления данного изобретения посредством перемещения по меньшей мере одного датчика 31 к известному местоположению(ям) с высокой точностью в пределах желательного пространственного объема. Несколько картирований может быть выполнено для множества разных местоположений и ориентаций генератора 34 электромагнитного поля и/или стола 33. Оптические датчики 35a и 35b слежения могут быть типичным оптическим датчиком с шестью степенями свободы, нечувствительным к искажениям, вносимым металлом. Соответственно, всестороннее картирование и компенсация выполняются для разных местоположений генератора и стола. Эту процедуру требуется предпринять лишь один раз, посредством чего облегчается использование раскрытых систем EMTS, например, в медицинском/хирургическом оборудовании. После ее завершения как генератор, так и стол могут перемещаться при реальном выполнении медицинской/хирургической процедуры, для которой картирование компенсации остается действительным.
В соответствии с типичным вариантом осуществления данного изобретения оптическая система 35 слежения осуществляет мониторинг местоположения оптических датчиков 35a и 35b слежения, так что их местоположения известны на всем протяжении процедуры картирования. Позиционирующая система 30 устанавливает датчик 31 EMTS в заданное положение очень точно при известных положениях в пространстве. Соответствующие данные о местоположении и ориентации регистрируются EMTS. Генератор поля затем перемещается в разные положения по отношению к столу, и процедура повторяется. При этом не требуется перемещение генератора поля и стола к множеству разных мест расположения; нескольких мест расположения может оказаться достаточным для картирования, пригодного для интервала местоположений генератора и стола. Стол является главным источником искажений, вносимых металлом, при использовании EMTS в медицинских видах применения, однако другие объекты в типичном медицинском оборудовании, такие как подвижная рама компьютерного томографа (CT), рентгеновская или C-дуга, также могут вызвать искажения. Этот способ может быть применен к другим возможным источникам искажений.
Посредством обеспечения компенсации погрешности системы EMTS в большей степени применимы на практике и предоставляют множество возможностей для объединения работы с рентгенографическими и томографическими изображениями с отслеживанием медицинского устройства. Данное техническое решение в целом применимо для большинства случаев, в которых врач нуждается в направленном перемещении медицинского устройства к заданному местоположению в человеческом теле.
Хотя данное изобретение описано со ссылками на типичные варианты осуществления представляемых устройств и способов, данное изобретение не ограничивается такими типичными вариантами осуществления. Напротив, устройства и способы по данному изобретению могут быть модифицированы, изменены и/или усовершенствованы без отклонения от сущности или объема данного изобретения, как это будет очевидно специалистам в данной области на основании описания, представленного в данном документе. Данное изобретение определенным образом включает в себя такие модификации, изменения и усовершенствования в рамках представленной формулы изобретения.


Группа изобретений относится к электромагнитным системам слежения для отслеживания медицинского устройства и способам компенсации локальной погрешности, обусловленной искажениями, вносимыми металлом, при использовании этих систем. Система слежения содержит генератор электромагнитного поля, генерирующий электромагнитное поле для получения данных местоположения медицинского устройства посредством наведения тока в сенсорной катушке медицинского устройства, и инструмент для коррекции погрешности. Последний содержит три электромагнитных датчика, установленных в заданной конфигурации. Инструмент для коррекции погрешности формирует функцию коррекции погрешности из обнаруженных местоположений и с учетом заданной конфигурации трех электромагнитных датчиков для коррекции данных местоположения медицинского устройства. При использовании системы слежения в одном варианте генерируют электромагнитное поле, производят мониторинг данных местоположения медицинского устройства в человеческом теле с использованием тока, наведенного электромагнитным полем в электромагнитной сенсорной катушке медицинского устройства, производят мониторинг данных местоположения трех электромагнитных датчиков. При этом инструмент для коррекции погрешности расположен поблизости от медицинского устройства, и три электромагнитных датчика расположены в заданной и фиксированной конфигурации. Далее устанавливают корректирующую функцию из полученных данных и применяют ее к указанным данным местоположения медицинского устройства для компенсирования искажений, вносимых металлом. В другом варианте для компенсации локальной погрешности, обусловленной искажениями, при отслеживании местоположения медицинского устройства, генерируют электромагнитное поле одним генератором электромагнитного поля, имеющим первый оптический датчик; используют первую платформу для поддержания медицинских процедур, содержащую второй оптический датчик; используют позиционирующую систему и выполняют компенсационные преобразования. При этом позиционирующая система содержит датчик электромагнитной системы слежения. Компенсационные преобразования включают перемещение позиционирующей системы к различным местоположениям в пределах требуемого пространственного объема; компенсирование местоположения медицинского устройства с учетом искажений, вносимых металлом на основании заданного расположения генератора электромагнитного поля и указанной первой платформы относительно указанной системы позиционирования. Использование группы изобретений позволит повысить эффективность компенсаций искажений и точности EMTS. 3 н. и 14 з.п. ф-лы, 3 ил.
1. Способ компенсации локальной погрешности, обусловленной искажениями, вносимыми металлом, при использовании электромагнитной системы слежения (EMTS), содержащий:
генерацию электромагнитного поля по меньшей мере одним генератором электромагнитного поля;
мониторинг данных местоположения медицинского устройства в человеческом теле с использованием тока, наведенного электромагнитным полем по меньшей мере в одной электромагнитной сенсорной катушке медицинского устройства;
мониторинг данных местоположения по меньшей мере трех электромагнитных датчиков инструмента для коррекции погрешности, способного осуществлять мониторинг искажений, вносимых металлом, при этом указанный инструмент для коррекции погрешности расположен поблизости от указанного медицинского устройства, и причем указанные по меньшей мере три электромагнитных датчика, расположены в заданной и фиксированной конфигурации;
установление корректирующей функции из указанных данных местоположения и с учетом заданной фиксированной конфигурации по меньшей мере трех электромагнитных датчиков;
применение указанной корректирующей функции к указанным данным местоположения медицинского устройства для компенсирования указанных искажений, вносимых металлом.
2. Способ по п.1, в котором указанный инструмент для коррекции погрешности имеет по меньшей мере четыре электромагнитных датчика.
3. Способ по п.1, в котором указанный инструмент для коррекции погрешности содержит по меньшей мере один оптический датчик слежения, прикрепленный к указанному инструменту в фиксированном заданном местоположении по отношению к по меньшей мере одному указанному электромагнитному датчику.
4. Способ по п.1, в котором указанный ток является функцией местоположения и ориентации по меньшей мере одной электромагнитной сенсорной катушки по отношению к указанному генератору электромагнитного поля.
5. Способ по п.1, в котором по меньшей мере три электромагнитных датчика разнесены друг от друга в виде треугольника или квадрата.
6. Электромагнитная система слежения (EMTS) для отслеживания медицинского устройства внутри человеческого тела, содержащая:
генератор электромагнитного поля, генерирующий электромагнитное поле для получения данных местоположения медицинского устройства, посредством наведения тока в сенсорной катушке медицинского устройства;
инструмент для коррекции погрешности, содержащий по меньшей мере три электромагнитных датчика, установленных в заданной конфигурации, при этом инструмент для коррекции погрешности формирует функцию коррекции погрешности из обнаруженных местоположений и с учетом заданной конфигурации по меньшей мере трех электромагнитных датчиков для коррекции данных местоположения медицинского устройства на основании функции коррекции погрешности для компенсирования искажения.
7. Электромагнитная система слежения по п.6, в которой по меньшей мере один оптический датчик слежения прикреплен к указанному инструменту для коррекции погрешности в фиксированном и заданном местоположении по отношению к сенсорной катушке медицинского устройства.
8. Электромагнитная система слежения по п.7, в которой указанный оптический датчик слежения и указанная сенсорная катушка регистрируются устройством для формирования изображений, обеспечивая эталонное положение для указанного инструмента коррекции погрешности.
9. Электромагнитная система слежения по п.7, в которой указанный инструмент для коррекции погрешности имеет по меньшей мере четыре электромагнитных датчика.
10. Электромагнитная система слежения по п.7, в которой указанный ток является функцией местоположения и ориентации указанной сенсорной катушки по отношению к указанному генератору электромагнитного поля.
11. Электромагнитная система слежения по п.6, в которой по меньшей мере три электромагнитных датчика разнесены друг от друга в виде треугольника или квадрата.
12. Способ компенсации локальной погрешности, обусловленной искажениями, вносимыми металлом, при отслеживании местоположения медицинского устройства, содержащего электромагнитную сенсорную катушку с использованием электромагнитной системы слежения (EMTS), содержащий:
генерацию электромагнитного поля по меньшей мере одним генератором электромагнитного поля, имеющим по меньшей мере первый оптический датчик;
использование первой платформы для поддержания медицинских процедур, которая содержит по меньшей мере один второй оптический датчик;
использование позиционирующей системы, содержащей по меньшей мере один датчик электромагнитной системы слежения (EMTS);
выполнение компенсационных преобразований, включающих следующие этапы:
перемещение указанной позиционирующей системы к различным местоположениям в пределах требуемого пространственного объема;
компенсирование местоположения медицинского устройства с учетом искажений, вносимых металлом на основании заданного расположения генератора электромагнитного поля и указанной первой платформы относительно указанной системы позиционирования.
13. Способ по п.12, в котором в указанной сенсорной катушке указанного медицинского устройства индуцируется ток, при этом указанный ток является функцией местоположения и ориентации указанной электромагнитной сенсорной катушки по отношению к указанному генератору электромагнитного поля.
14. Способ по п.12, в котором на этапе компенсирования к данным местоположения медицинского устройства применяется корректирующая функция для формирования компенсированных данных местоположения, для компенсации искажений, вносимых металлом, причем данные местоположения медицинского устройства получаются из тока, индуцированного электромагнитным полем в электромагнитной сенсорной катушке медицинского устройства.
15. Способ по п.14, в котором компенсированные данные местоположения используются для отображения медицинского устройства на устройстве для формирования изображений.
16. Способ по п.12, в котором указанный первый оптический датчик является оптическим датчиком слежения с шестью степенями свободы.
17. Способ по п.12, в котором указанный второй оптический датчик является оптическим датчиком слежения с шестью степенями свободы.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 5676673 A, 14.10.1997 | |||
| US 5744953 A, 28.04.1998 | |||
| RU 2002123541 A, 10.03.2004. | |||

