Настоящее изобретение относится к устройству управления вагоном электропоезда, которое осуществляет инверторное управление на асинхронных двигателях, которые приводят в движение колеса вагона электропоезда. Настоящее изобретение, в частности, относится к устройству управления вагоном электропоезда, которое имеет функцию управления пробуксовкой в ходе операции тяги и проскальзыванием в ходе операции торможения.
Предшествующий уровень техники
В устройстве управления вагоном электропоезда, крутящим моментом асинхронных двигателей необходимо надлежащим образом управлять так, чтобы не возникала пробуксовка колес для достижения плавного ускорения в ходе операции тяги. Например, в патентном документе 1 раскрыта конструкция устройства управления вагоном электропоезда для управления пробуксовки в ходе операции тяги. Устройство управления вагоном электропоезда приводит в действие четыре асинхронных двигателя для приведения в движение четырех осей ведущих колес с помощью одного инвертора.
В частности, традиционное устройство управления вагоном электропоезда вычисляет скорость каждой оси на основании сигнала детектирования, регистрируемого соответствующим одним из четырех генераторов импульсов, которые по отдельности детектируют количество оборотов четырех асинхронных двигателей. Затем максимальная осевая скорость и минимальная осевая скорость выбираются из четырех осевых скоростей, и вычисляется отклонение скорости ΔV. Кроме того, минимальная осевая скорость, выбранная из четырех осевых скоростей, определяется как опорная скорость V0, опорное ускорение α0 вычисляется из опорной скорости V0, и ускорения от α1 до α4 осей вычисляются из четырех осевых скоростей.
На основании вычисленных таким образом: отклонения скорости ΔV, опорной скорости V0, опорного ускорения α0 и осевых ускорений от α1 до α4 оценивается, находятся ли какие-либо колеса соответствующих осей в состоянии пробуксовки. Например, в случае, когда пробуксовка происходит на одной оси, пробуксовка детектируется, когда отклонение скорости ΔV превышает заданное значение, или когда любое из осевых ускорений от α1 до α4 превышает опорное ускорение α0, которое является уровнем детектирования пробуксовки. Когда детектируется состояние пробуксовки, операция ограничения осуществляется таким образом, чтобы значение команды тока, которое поступает из инвертора на асинхронный двигатель, временно снижалось от исходного значения (целевого значения). Таким образом, во время пробуксовки предотвращается возникновение явления аномальной вибрации в вагоне электропоезда.
[Патентный документ 1-выложенная патентная заявка Японии №11-89005 (абзацы [0002]-[0006], фиг.19)]
Краткое изложение существа изобретения
В вышеописанном традиционном управлении пробуксовкой, при котором пробуксовка детектируется на основании отклонения между осевым ускорением и опорным ускорением, изменение (отклонение) ускорения можно точно детектировать, когда ускорение значительно изменяется. Например, изменение ускорения столь же велико, как заранее определенное ускорение: ускорение изменяется от 3,0 км/ч/с до 5,0 км/ч/с по причине пробуксовки, когда заранее определенное ускорение равно 4,0 км/ч/с. Затем функция детектирования пробуксовки действует надлежащим образом для временного ограничения значения команды тока. Однако, когда заранее определенное ускорение равно 4,0 км/ч/с, и ускорение изменяется, например, от 3,9 км/ч/с до 4,1 км/ч/с, изменение ускорения может детектироваться не точно, поскольку изменение (отклонение) ускорения, обусловленное пробуксовкой, сравнительно мало относительно заранее определенного ускорения.
В случае, когда невозможно проводить надлежащее детектирование изменения ускорения, обусловленного пробуксовкой, невозможно надлежащим образом управлять скоростью, что может вызывать вибрацию вагона электропоезда, активацию защитного устройства или даже активацию экстренного торможения. Это может затруднять устойчивое движение вагона электропоезда. Вышеописанное явление аналогично применимо к управлению проскальзыванием во время торможения (замедления).
Настоящее изобретение было сделано в виду вышеизложенного. Задачей настоящего изобретения является создание устройства управления вагоном электропоезда, которое может надежно детектировать состояние пробуксовки/состояние проскальзывания и надлежащим образом осуществлять управление крутящим моментом, даже когда изменение ускорения/замедления слишком мало, чтобы можно было детектировать изменение ускорения/замедления вагона электропоезда с использованием отклонения ускорения/замедления.
Устройство управления вагоном электропоезда согласно аспекту настоящего изобретения имеет блок управления, который генерирует значение команды целевого крутящего момента для совокупности двигателей для подавления состояния пробуксовки ведущих колес на основании скоростей вращения двигателей, которые приводят в движение совокупность осей ведущих колес, причем блок управления содержит: первый блок оценки, который получает, с использованием собственно осевых скоростей, которые являются скоростями вращения двигателей, и опорной скорости, которая является минимальной скоростью из скоростей вращения двигателей, отклонение скорости каждой из собственно осевых скоростей от опорной скорости и отклонение ускорения, и оценивает степень состояния пробуксовки ведущих колес в соответствии с тем, насколько полученные таким образом отклонение скорости и отклонение ускорения превышают пороговые значения, которые определены по отдельности; блок осуществления процесса ограничения, который осуществляет процесс ограничения для снижения значения команды предписанного крутящего момента, которая поступает извне, в соответствии с результатом оценки, полученным первым блоком оценки; второй блок оценки, который определяет первое пороговое значение, которое превышает абсолютное ускорение, определенное в соответствии с условиями эксплуатации транспортного средства по отношению к абсолютному ускорению, и оценивает, превышает ли ускорение собственно осевой скорости, которая является максимальной скоростью, выбранной из скоростей вращения двигателей, первое пороговое значение; и блок выходной обработки, который выводит значение команды крутящего момента, обработанное блоком осуществления процесса ограничения, в качестве значения команды целевого крутящего момента, когда результатом оценки, полученный вторым блоком оценки, является «отсутствие превышения первого порогового значения», и выводит значение команды целевого крутящего момента, подвергнутое процессу снижения, который осуществляется независимо от результата процесса, полученного блоком осуществления процесса ограничения, когда результатом оценки, полученным вторым блоком оценки, является «превышение первого порогового значения».
Согласно настоящему изобретению задается первое пороговое значение по отношению к абсолютному ускорению, определенному в соответствии с условиями эксплуатации транспортного средства, для детектирования изменения ускорения для собственно осевой скорости, которая имеет максимальную скорость из скоростей вращения множества двигателей, которые приводят в движение множество осей ведущих колес. Когда ускорение превышает первое значение, выводится значение команды целевого крутящего момента, подвергнутое процессу снижения, который осуществляется независимо от результата обработки блока осуществления процесса ограничения. В условиях движения с ускорением, определенным в соответствии с условиями эксплуатации транспортного средства, состояние пробуксовки можно надежно детектировать, и управление крутящим моментом можно осуществлять надлежащим образом, даже когда изменение ускорения слишком мало, чтобы его можно было детектировать на основании отклонения ускорения.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
фиг.1 изображает блок-схему, демонстрирующая частичную конструкцию устройства управления вагоном электропоезда согласно варианту осуществления настоящего изобретения;
фиг.2 изображает временную диаграмму операции контроля пробуксовки.
Описание предпочтительных вариантов осуществления изобретения
Иллюстративные варианты осуществления устройства управления вагоном электропоезда согласно настоящему изобретению подробно описаны ниже со ссылками на прилагаемые чертежи. Полная конструкция устройства управления вагоном электропоезда, в основном, включает в себя блок преобразования мощности, к которому параллельно подключены множество асинхронных двигателей, которые приводят в движение множество ведущих колесных осей, которые находятся под управлением; блок управления, который оценивает состояние пробуксовки/состояние проскальзывания во время тяги/торможения на основании сигналов детектирования (сигналов PG) генераторов импульсов (PG), которые детектируют соответствующее количество оборотов множества асинхронных двигателей, и выводит команду целевого крутящего момента TP для отмены таких состояний; и вычислительный блок, который вычисляет сигнал возбуждения в соответствии с командой целевого крутящего момента TP, выводимой блоком управления, и подает его на схему переключения блока преобразования мощности. Асинхронные двигатели параллельно подключены к выходной клемме схемы переключения.
На фиг.1 показана блок-схема, демонстрирующая частичную конструкцию устройства управления вагоном электропоезда согласно варианту осуществления настоящего изобретения. Для облегчения понимания этого изобретения в описании нижеследующего варианта осуществления рассмотрен случай, когда блок управления, который является основным компонентом, осуществляет управление пробуксовкой во время тяги (ускорения), но этот вариант осуществления также применим к случаю управления пробуксовкой во время торможения (замедления).
Согласно фиг.1 сигналы PG в диапазоне P1-Pn являются сигналами детектирования от множественных генераторов импульсов (PG). Каждый из генераторов импульсов детектирует количество оборотов соответствующего одного из асинхронных двигателей. Каждый из двигателей приводит в движение соответствующую ведущую колесную ось, которая находится под управлением. Другими словами, сигналы PG (P1-Pn) являются сигналами скорости, которые указывают скорости вращения соответствующих асинхронных двигателей, т.е. скорости вращения соответствующих ведущих колес.
Совокупность схем 1 детектирования частоты предусмотрена во взаимно-однозначном соответствии с сигналами PG (P1-Pn), но на фиг.1 показана только одна из них. Согласно фиг.1 один из сигналов PG (P1-Pn), т.е. сигнал PG P1, поступает на схему 1 детектирования частоты. Все сигналы PG (P1-Pn) поступают параллельно на схему 2 детектирования минимальной частоты и схему 3 детектирования максимальной частоты.
Схема 1 детектирования частоты детектирует частоту соответствующего сигнала PG (сигнала PG P1 на фиг.1) в сигналах PG (P1-Pn) и выводит ее на соответствующую одну из схем 4 детектирования ускорения и схем 5 детектирования разности скоростей. Хотя на фиг.1 это не показано, совокупность схем 4 детектирования ускорения и совокупность схем 5 детектирования разности скоростей предусмотрены во взаимно-однозначном соответствии с сигналами PG (P1-Pn) по аналогии со схемами 1 детектирования частоты. На фиг.1 показана каждая из соответствующих схем.
Схема 2 детектирования минимальной частоты детектирует минимальную частоту из сигналов PG (P1-Pn) и параллельно выводит ее на схемы 4 детектирования ускорения и схемы 5 детектирования разности скоростей. Напротив, схема 3 детектирования максимальной частоты детектирует максимальную частоту сигналов PG (P1-Pn) и выводит ее на дифференциатор 6.
Каждая схема 4 детектирования ускорения вычисляет ускорение (далее, для удобства, именуемое "опорным ускорением") путем осуществления дифференциальной обработки скорости вращения оси ведущего колеса, имеющей минимальную частоту, которая была детектирована схемой 2 детектирования минимальной частоты. Параллельно с этим каждая схема 4 детектирования ускорения вычисляет ускорение (далее, для удобства, именуемое "собственно осевым ускорением") путем осуществления дифференциальной обработки скорости вращения (далее, для удобства, именуемой "собственно осевой скоростью") S1 оси ведущего колеса, детектированной соответствующей одной из схем 1 детектирования частоты.
Затем каждая из схем 4 детектирования ускорения вычисляет отклонение ускорения между собственно осевым ускорением и опорным ускорением, сравнивает вычисленное отклонение ускорения с заранее определенным пороговым значением, сообщает детектору 7 скольжения, что ускорение нормально, когда отклонение ускорения не превышает заранее определенное пороговое ускорение, и сообщает детектору 7 скольжения, что ускорение аномально, когда отклонение ускорения превышает заранее определенное пороговое ускорение, прилагая значение превышения.
Каждая из схем 5 детектирования разности скоростей вычисляет разность между скоростью вращения оси ведущего колеса, имеющей минимальную частоту, детектированную схемой 2 детектирования минимальной частоты, и собственно осевой скоростью, детектированной соответствующей одной из схем 1 детектирования частоты, сравнивает разность скоростей с заранее определенным пороговым значением, сообщает детектору 7 скольжения, что разность скоростей нормальна, когда разность скоростей не превышает заранее определенное пороговое значение, и сообщает детектору 7 скольжения, что разность скоростей аномальна, когда разность скоростей превышает заранее определенное пороговое значение, прилагая значение превышения.
Извещение A1, указывающее "нормальность" или "аномалию" ускорения соответствующей одной из осей ведущих колес, поступает от каждой схемы 4 детектирования ускорения, и извещение B1, указывающее "нормальность" или "аномалию" разности скоростей соответствующей одной из осей ведущих колес, поступает от каждой схемы 5 детектирования. На основании этих извещений детектор 7 скольжения определяет степень пробуксовки для всех осей ведущих колес. Например, если пробуксовка не детектируется, устанавливается значение "1". Если пробуксовка детектируется, устанавливается конкретное значение между "1" и "0" в соответствии со степенью аномалии, указанной в выходных сигналах схемы 4 детектирования ускорения и схемы 5 детектирования разности скоростей. Сигнал детектирования пробуксовки C1 для всех осей ведущих колес, указывающий определенную таким образом степень пробуксовки, поступает на умножитель 8.
Дифференциатор 6 вычисляет ускорение (далее именуемое, для удобства, "максимальным ускорением") S2 путем дифференцирования скорости вращения оси ведущего колеса, имеющей максимальную частоту, которая детектируется схемой 3 детектирования максимальной частоты, и выводит его на схему 9 задержки первого порядка.
Схема 9 задержки первого порядка представляет собой фильтр, который удаляет шумовые компоненты из сигнала максимального ускорения S2, выдаваемого дифференциатором 6. Схема 9 задержки первого порядка вносит задержку, равную заранее определенной постоянной времени, в сигнал максимального ускорения S2', из которого удалены шумовые компоненты, и выводит его на одну из входных клемм схемы 10 компаратора.
Схема 11 задания абсолютного ускорения - это схема, которая задает абсолютное ускорение в соответствии с условиями эксплуатации транспортного средства, которые поступают извне. Схема 11 задания абсолютного ускорения выводит на другую из входных клемм схемы 10 компаратора два пороговых значения (пороговое значение максимального ускорения α1 в качестве первого порогового значения и пороговое значение минимального ускорения α2 в качестве второго порогового значения), которые определяются выше и ниже заданного абсолютного ускорения, с использованием заданного абсолютного ускорения в качестве опорного значения. Другими словами, два пороговых значения (пороговое значение максимального ускорения α1 и пороговое значение минимального ускорения α2) изменяются в соответствии с абсолютным ускорением, которое устанавливается в соответствии с условиями эксплуатации транспортного средства.
Схема 10 компаратора имеет функцию гистерезиса. Выходной сигнал устанавливается заданного уровня (уровень, имеющий логическое значение "0" в примере на фиг.1), когда сигнал максимального ускорения S2', поступающий из схемы 9 задержки первого порядка, превышает пороговое значение максимального ускорения α1, выдаваемое схемой 11 задания абсолютного ускорения, и затем, когда сигнал максимального ускорения S2' падает ниже порогового значения минимального ускорения α2, выдаваемого схемой 11 задания абсолютного ускорения, выходной сигнал снова устанавливается на уровень сброса (логическое значение "1" в примере на фиг.1).
Другими словами, изменение ускорения, которое слишком мало, чтобы его можно было детектировать на основании отклонения ускорения (постепенное изменение ускорения) согласно традиционной технологии, детектируется схемой 11 задания абсолютного ускорения и схемой 10 компаратора. Выход S3 схемы 10 компаратора поступает на другую клемму умножителя 8 и также поступает на схему 12 генерации времени задержки.
Умножитель 8 умножает сигнал детектирования пробуксовки C1, поступающий от детектора 7 скольжения на выход S3 схемы 10 компаратора, и выдает результат умножения на одну из входных клемм умножителя 13. Это означает, что когда логическое значение выхода S3 схемы 10 компаратора равно уровню сброса (уровню "1"), сигнал детектирования пробуксовки C1, выдаваемый детектором 7 скольжения, поступает на входную клемму умножителя 13 как есть, и когда логическое значение выхода S3 схемы 10 компаратора равно заданному уровню (уровню "0"), значение "0" вводится в течение периода, когда логическое значение выхода S3 схемы 10 компаратора находится на заданном уровне.
Команда предписанного крутящего момента TP" поступает извне на другую входную клемму умножителя 13 в соответствии с командами и скоростями. В течение периода, когда входной сигнал от умножителя 8 имеет значение "0", умножитель 13 выводит значение "0" на схему 14 задержки первого порядка. Когда логическое значение выхода S3 схемы компаратора 10 равно уровню сброса (уровень "1"), умножитель 13 преобразует введенную извне команду предписанного крутящего момента TP" в команду предписанного крутящего момента TP' путем осуществления снижения и т.п. на ней в соответствии со степенью пробуксовки, указанной сигналом обнаружения пробуксовки C1, который поступает от умножителя 8, и выводит команду предписанного крутящего момента TP' на схему 14 задержки первого порядка.
Схема 12 генерации времени задержки выводит сигнал первого уровня, соответствующий уровню сброса, когда схема 10 компаратора поддерживает уровень сброса, без изменения выходного уровня. Однако, когда схема 10 компаратора изменяет выходной уровень от уровня сброса до заданного уровня, схема 12 генерации времени задержки выводит сигнал второго уровня, соответствующий заданному уровню, и поддерживает второй уровень в течение определенного периода времени после того, как выходной уровень изменился на заданный уровень. Схема 12 генерации времени задержки поддерживает второй уровень даже после того, как схема 10 компаратора возвращает выходной уровень на уровень сброса. По истечении определенного периода времени выводится сигнал первого уровня, соответствующий восстановленному уровню сброса. Выход S4 схемы 12 генерации времени задержки поступает на схему 14 задержки первого порядка в качестве сигнала управления.
Когда выходной уровень схемы 12 генерации времени задержки не изменяется и поддерживается на первом уровне, схема 14 задержки первого порядка непосредственно выводит команду предписанного крутящего момента TP', в отношении которой на умножителе 13 осуществляется снижение и т.п., в качестве команды целевого крутящего момента TP.
Напротив, когда выходной уровень схемы 12 генерации времени задержки изменяется от первого уровня до второго уровня, схема 14 задержки первого порядка продолжает применять процесс большого снижения к значению команды целевого крутящего момента TP, которая была отправлена непосредственно до этого, в течение периода времени, когда выходной уровень схемы 12 генерации времени задержки поддерживается на втором уровне. Это осуществляется независимо от команды предписанного крутящего момента TP', в отношении которой осуществляется снижение и т.п. Таким образом, схема 14 задержки первого порядка выводит команду сильно ограниченного целевого крутящего момента TP. Когда выходной уровень схемы 12 генерации времени задержки возвращается к первоначальному первому уровню, вышеупомянутое ограничение заканчивается. Схема 14 задержки первого порядка возвращается к операции, в которой команда предписанного крутящего момента TP' выводится как есть, в отношении которой на умножителе 13 осуществляется снижение и т.п., в качестве команды целевого крутящего момента TP.
Команда целевого крутящего момента TP, которая выводится вышеописанной схемой 14 задержки первого порядка, поступает на непоказанный вычислительный блок, и на блоке преобразования мощности осуществляется снижение и т.п. в отношении тока, подаваемого на все асинхронные двигатели. Таким образом, осуществляется управление выходными крутящими моментами на всех осях ведущих колес.
Здесь в описании раскрывается формула изобретения. Схемы 1 детектирования частоты, схема 2 детектирования минимальной частоты, схемы 4 детектирования ускорения, схемы 5 детектирования разности скоростей и детектор 7 скольжения совместно образуют первый блок оценки. Схема 11 задания абсолютного ускорения и схема 10 компаратора совместно образуют второй блок оценки. Умножитель 8 образует блок переключения процесса. Умножитель 13 образует блок осуществления процесса ограничения. Схема 14 задержки первого порядка образует блок выходной обработки. Схема 12 генерации времени задержки образует блок управления процессом.
В вышеописанной конструкции управление пробуксовкой осуществляется совокупностью схем 1 детектирования частоты, схемой 2 детектирования минимальной частоты, совокупностью схем 4 детектирования ускорения, совокупностью схем 5 детектирования разности скоростей, детектором 7 скольжения, умножителем 13 и схемой 14 задержки первого порядка на основании отклонения ускорения и отклонения скорости, при наличии значительного изменения ускорения при ускорении вагона электропоезда во время тяги.
Управление пробуксовкой, осуществляемое при наличии малого изменения ускорения при ускорении вагона электропоезда во время тяги, представляет собой управление пробуксовкой согласно данному варианту осуществления. Это реализуется схемой 3 детектирования максимальной частоты, дифференциатором 6, схемой 9 задержки первого порядка, схемой 11 задания абсолютного ускорения, схемой 10 компаратора, умножителем 8, схемой 12 генерации времени задержки и схемой 14 задержки первого порядка.
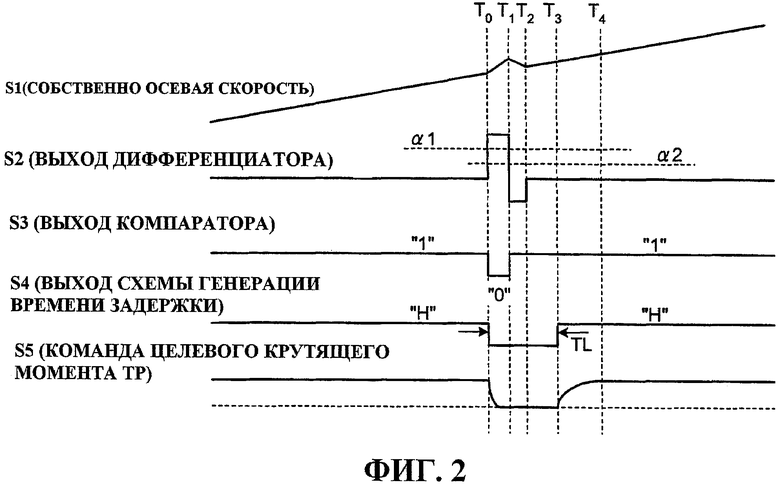
Теперь опишем операцию управления пробуксовкой согласно данному варианту осуществления, представленную на фиг.2, со ссылкой на фиг.1. На фиг.2 показана временная диаграмма операции управления пробуксовкой. Для облегчения понимания на фиг.2 показана работа каждого блока в момент времени пробуксовки на одной оси.
Как указывает S1 (собственно осевая скорость) на фиг.2, когда скорость вращения (собственно осевая скорость), детектируемая для одной из осей ведущих колес (в данном примере, оси ведущего колеса, имеющей максимальную частоту) постоянно увеличивается при, по существу, фиксированном заранее определенном ускорении, и малое изменение ускорения происходит вследствие пробуксовки в момент времени T0, согласно данному варианту осуществления активируется операция управления пробуксовкой. Изменение ускорения возрастает до момента времени T1, затем переходит к снижению и исчезает в момент времени T2. Период между моментами времени T0 и T3 - это рабочий период для операции управления пробуксовкой согласно данному варианту осуществления.
Схема 3 детектирования максимальной частоты детектирует ось ведущего колеса, имеющую максимальную частоту, из осей ведущих колес, двигающихся с заранее определенным ускорением, и выводит максимальную частоту на дифференциатор 6 при каждом детектировании. В этом процессе малое изменение частоты, обусловленное событием пробуксовки в момент времени T0, может детектироваться схемой 3 детектирования максимальной частоты, и ускорение S2 определяется дифференциатором 6 и поступает через схему 9 задержки первого порядка на схему 10 компаратора.
На фиг.2 изменение ускорения S2 (выход дифференциатора) оси ведущего колеса в состоянии пробуксовки, детектируемом схемой 3 детектирования максимальной частоты, указывается с пороговым значением максимального ускорения α1 и пороговым значением минимального ускорения α2, которые задаются схеме 10 компаратора схемой 11 задания абсолютного ускорения.
Как указывает S3 (выход компаратора) на фиг.2, схема 10 компаратора сохраняет выходной уровень на уровне сброса, имеющем логическое значение "1" (далее "нормальное состояние") до момента времени T0, в который управление пробуксовкой осуществляется на основании сигнала детектирования пробуксовки C1. Таким образом, умножитель 8 подает сигнал детектирования пробуксовки C1 от детектора 7 скольжения непосредственно на умножитель 13, и поэтому умножитель 13 выводит на схему 14 задержки первого порядка команду предписанного крутящего момента TP', полученную путем осуществления процесса ограничения и т.п. над введенной извне командой предписанного крутящего момента TP" в соответствии с сигналом детектирования пробуксовки C1.
Как указывает S4 (выход схемы генерации времени задержки) на фиг.2, схема 12 генерации времени задержки сохраняет выходной уровень на вышеупомянутом первом уровне, который является высоким уровнем (далее, "уровнем "H") до момента времени T0, т.е. в течение нормального состояния. Таким образом, как указывает S5 (команда целевого крутящего момента TP) на фиг.2, команда целевого крутящего момента TP', в отношении которой процесс ограничения и т.п. осуществляется в соответствии со значением сигнала детектирования пробуксовки C1, выводится в качестве выхода S5 схемы 14 задержки первого порядка в качестве команды целевого крутящего момента TP до момента времени T0.
В этой ситуации, как указывает S1 (собственно осевая скорость) на фиг.2, если пробуксовка происходит на оси ведущего колеса в момент времени T0, и ускорение S2 детектируемой оси ведущего колеса, имеющей максимальную частоту, превышает пороговое значение максимального ускорения α1, схема 10 компаратора задает выходной уровень как заданный уровень, имеющий логическое значение "0", по существу, в то же время, что и момент T0.
Когда выходной уровень S3 схемы 10 компаратора оказывается равным заданному уровню, имеющему логическое значение "0", по существу, в то же время, что и момент T0, когда имела место пробуксовка, выходы умножителей 8 и 13 устанавливаются на значение "0" независимо от значения сигнала детектирования пробуксовки C1. Затем схема 12 генерации времени задержки задает выходной уровень как вышеупомянутый второй уровень, который является низким уровнем (далее "уровнем "L"), и запускает операцию его поддержания до истечения определенного периода времени TL, как указывает S4 (выход схемы генерации времени задержки) на фиг.2.
Таким образом, схема 14 задержки первого порядка осуществляет операцию ограничения в начальный момент определенного периода времени TL для постепенного снижения команды целевого крутящего момента TP, которая была отправлена непосредственно до этого, и выход S4 схемы 12 генерации времени задержки поддерживается на уровне "L" до момента времени T3 в течение определенного периода времени TL. Таким образом, команда целевого крутящего момента TP достигает заранее определенного минимального значения, например, значения "0". В примере, указанном S5 (командой целевого крутящего момента TP) на фиг.2, команда целевого крутящего момента TP=0 устанавливается в момент времени T1.
Благодаря такому процессу ограничения команды целевого крутящего момента TP, как указывает S1 (осевая скорость) на фиг.2, скорость, которая изменяется, прекращает увеличиваться и начинает снижаться в момент времени T1 на оси ведущего колеса, имеющей максимальную частоту, на которой имела место пробуксовка в момент времени T0. Затем ускорение S2, детектированное в момент времени T1, падет ниже порогового значения минимального ускорения α2. Схема 10 компаратора осуществляет операцию возвращения выходного уровня к уровню сброса логического значения "1". Таким образом, выходы умножителей 8 и 13 уже не имеют значение "0", но приобретают значение, соответствующее сигналу детектирования пробуксовки C1, и выход умножителя 13 поступает на схему 14 задержки первого порядка.
Однако определенный период времени TL, в течение которого схема 12 генерации времени задержки поддерживает выходной уровень на уровне "L", длиннее, чем промежуток времени, в течение которого схема 10 компаратора поддерживает выходной уровень на заданном уровне логического значения "0". Таким образом, схема 12 генерации времени задержки сохраняет выходной уровень на "L" уровне даже после того, как схема 10 компаратора возвращает выходной уровень на уровень сброса.
Таким образом, схема 14 задержки первого порядка продолжает выводить команду целевого крутящего момента TP со значением "0", независимо от выходного значения умножителя 13. Малое изменение ускорения, происходящее при заранее определенном ускорении оси ведущего колеса, имеющей максимальную частоту, на которой имела место пробуксовка в момент времени T0, исчезает в момент времени T2, как указывает S1 (собственно осевая скорость) на фиг.2. Другими словами, пробуксовка устраняется и исчезает.
На фиг.2 также отражено изменение ускорения S2, детектируемое между моментами времени T1 и T2. Схема 10 компаратора не реагирует на ускорение S2, детектируемое между моментами времени T1 и T2, поскольку его значение ниже порогового значения максимального ускорения α1 и порогового значения минимального ускорения α2.
Затем схема 12 генерации времени задержки повышает выходной уровень до уровня "H" в момент времени T3 по истечении определенного периода времени TL. Затем, как указывает S5 на фиг.2, схема 14 задержки первого порядка запускает в конце фиксированного периода времени TL операцию постепенного увеличения команды целевого крутящего момента TP, которая была снижена до значения "0", до заранее определенного значения, указанного командой предписанного крутящего момента TP', которая выводится умножителем 13, в течение времени элемента задержки первого порядка, с последующим возвратом ее в заранее определенное значение. На фиг.2 она возвращается в заранее определенное значение в момент времени T4.
Как описано, пороговое значение максимального ускорения α1 задается для малого изменения ускорения на оси ведущего колеса, имеющей максимальную частоту, детектируемую схемой 3 детектирования максимальной частоты, что позволяет детектировать малое изменение ускорения. Таким образом, даже в ситуации, когда пробуксовка происходит во время движения вагона электропоезда с заранее определенным ускорением, но изменение ускорения слишком мало для детектирования пробуксовки на основании отклонения ускорения, при этом пробуксовку можно надежно детектировать, и команду целевого крутящего момента можно ограничивать. Это позволяет быстро осуществлять надлежащее управление крутящим моментом для устранения пробуксовки, что повышает управляемость вагона электропоезда.
Как показано на фиг.1, пороговое значение максимального ускорения α1 для малого изменения ускорения на оси ведущего колеса, имеющей максимальную частоту, устанавливается схемой 11 задания абсолютного ускорения, но заданное значение может изменяться в соответствии с различными условиями эксплуатации транспортного средства. Поэтому пороговое значение максимального ускорения α1 всегда можно задавать на оптимальном уровне обнаружения пробуксовки. Пороговое значение минимального ускорения α2 предусмотрено для сброса схемы 10 компаратора и, таким образом, устанавливается на нужное значение для управления.
Условия эксплуатации транспортного средства, подлежащие рассмотрению, можно подразделить на следующие случаи (1)-(3).
(1) Условия эксплуатации транспортного средства, подлежащие рассмотрению, для поезда, состоящего из вагонов, каждый из которых снабжен вышеописанным устройством управления вагоном электропоезда согласно данному варианту осуществления, представляют собой неисправность любого из устройств управления вагоном электропоезда. В этом случае, поскольку максимальное ускорение, которое может быть достигнуто поездом, состоящим из вагонов, изменяется, неисправность устройства управления вагоном электропоезда выявляется устройством мониторинга транспортного средства и т.п., и максимальное ускорение, которое может быть достигнуто поездом, состоящим из вагонов, задается схеме 11 задания абсолютного ускорения. При этом пороговое значение максимального ускорения α1, т.е. уровень детектирования пробуксовки, измененный по сравнению со случаем, когда все устройства управления вагоном электропоезда работают нормально, и связанное с ним пороговое значение минимального ускорения α2 задаются схеме 10 компаратора схемой 11 задания абсолютного ускорения.
(2) В поезде, состоящем из вагонов, каждый из которых снабжен устройством управления вагоном электропоезда согласно вышеописанному варианту осуществления, условия эксплуатации транспортного средства, подлежащие рассмотрению, представляют собой конкретный режим вождения, принятый в порядке выбора операции. Максимальное ускорение, которое может быть достигнуто поездом, состоящим из вагонов, в этой ситуации отличается от максимального ускорения поезда, состоящего из вагонов, в регулярном режиме вождения. Максимальное ускорение, которое может быть достигнуто в конкретном режиме вождения, задается схеме 11 задания абсолютного ускорения. При этом схема 11 задания абсолютного ускорения задает схеме 10 компаратора пороговое значение максимального ускорения α1, которое представляет собой уровень детектирования пробуксовки, измененный от максимального ускорения, которое может быть достигнуто поездом, состоящим из вагонов, в регулярном режиме вождения, до максимального ускорения в конкретном режиме вождения, и связанное с ним пороговое значение минимального ускорения α2.
(3) В общем случае частота возникновения пробуксовки имеет тенденцию к сезонному изменению в течение года. Например, пробуксовка чаще происходит в сезон дождей в июне и сезон листопада осенью, чем в другие сезоны. Таким образом, условия эксплуатации транспортного средства, подлежащие рассмотрению, для поезда, состоящего из вагонов, каждый из которых снабжен устройством управления вагоном электропоезда согласно вышеописанному варианту осуществления, представляет собой сезон, распознаваемый функцией календаря, предусмотренной в устройстве мониторинга транспортного средства и т.п. В этом случае максимальное ускорение, которое может быть достигнуто поездом, состоящим из вагонов, в распознанный сезон задается схеме 11 задания абсолютного ускорения. При этом пороговое значение максимального ускорения α1, которое представляет собой уровень детектирования пробуксовки, измененный в соответствии с распознанным сезоном, и связанное с ним пороговое значение минимального ускорения α2 задаются схеме 10 компаратора схемой 11 задания абсолютного ускорения.
Управление пробуксовкой, осуществляемое во время тяги, было описано выше, но эта обработка также применима к управлению проскальзыванием во время торможения, т.е. операции замедления. Другими словами, поскольку во время замедления происходит замедление, линия характеристики собственно осевой скорости S1, указанная на фиг.2, имеет тенденцию к снижению. Когда происходит проскальзывание, скорость дополнительно изменяется в сторону снижения по отношению к замедлению вагона электропоезда.
Это означает, что в случае управления пробуксовкой для применения соотношения между "максимальной скоростью" и "минимальной скоростью", используемого при управлении пробуксовкой, его нужно сменить на обратное.
Таким образом, в ходе операции замедления схема 2 детектирования минимальной частоты и схема 3 детектирования максимальной частоты должны быть заменены в структуре, указанной на фиг.1. Выход схемы 3 детектирования максимальной частоты поступает на схемы 4 детектирования ускорения и схемы 5 детектирования разности скоростей, тогда как выход схемы 2 детектирования минимальной частоты поступает на дифференциатор 6. Пороговое значение максимального замедления α1 и пороговое значение минимального замедления α2 поступают на компаратор 10. Таким образом, можно аналогично добиться управления пробуксовкой.
В фактическом устройстве управления вагоном электропоезда, блоки, к которым подключены схема 2 детектирования минимальной частоты и схема 3 детектирования максимальной частоты, переключаются, как описано выше, между операцией тяги и операцией замедления. В вышеупомянутых случаях (1)-(3), в которых рассмотрены условия эксплуатации транспортного средства, дополнительно определяется "максимальное замедление" для операции замедления.
Промышленная применимость
Как описано выше, устройство управления вагоном электропоезда согласно настоящему изобретению полезно для надежного управления и устранения состояния пробуксовки/проскальзывания для повышения управляемости вагона электропоезда, движущегося с ускорением/замедлением, определенным в соответствии с условиями эксплуатации транспортного средства, даже когда ускорение/изменение замедления слишком мало, чтобы его можно было детектировать на основании отклонения ускорения/замедления.
Перечень условных обозначений
1. Схема детектирования частоты
2. Схема детектирования минимальной частоты
3. Схема детектирования максимальной частоты
4. Схема детектирования ускорения
5. Схема детектирования разности скоростей
6. Дифференциатор
7. Детектор скольжения
8. Умножитель
9. Схема задержки первого порядка
10. Схема компаратора
11. Схема задания абсолютного ускорения
12. Схема генерации времени задержки
13. Умножитель
14. Схема задержки первого порядка
Группа изобретений относится к устройствам управления вагоном электропоезда, которые осуществляют инверторное управление на асинхронных двигателях, которые приводят в движение колеса вагона электропоезда. Устройство содержит блок управления, содержащий первый блок оценки, соединенный с блоком осуществления процесса ограничения, второй блок оценки, соединенный с блоком обработки выходного сигнала. Блок управления дополнительно содержит блок переключения процесса, соединенный с первым и вторым блоком оценки, и блок управления процессом, соединенный со вторым блоком оценки и с блоком обработки выходного сигнала. Блок управления генерирует значения команды целевого крутящего момента для множества двигателей для подавления состояния пробуксовки ведущих колес на основании скоростей вращения двигателей, которые приводят в движение множество осей ведущих колес. Блок оценки определяет степень состояния пробуксовки ведущих колес в соответствии с тем, насколько отклонение скорости и отклонение ускорения превышают пороги, которые определены по отдельности. Блок осуществления процесса ограничения ограничивает снижение значения команды предписанного крутящего момента, которая поступает извне, в соответствии с результатом оценки, полученным первым блоком оценки. Второй блок оценки определяет, превышает ли ускорение собственно осевой скорости, которая является максимальной скоростью, выбранной из скоростей вращения двигателей, первое пороговое значение. Блок обработки выходного сигнала выводит значение команды крутящего момента, обработанное блоком осуществления процесса ограничения. Достигается повышение управляемости вагона. 4 н. и 10 з.п. ф-лы, 2 ил.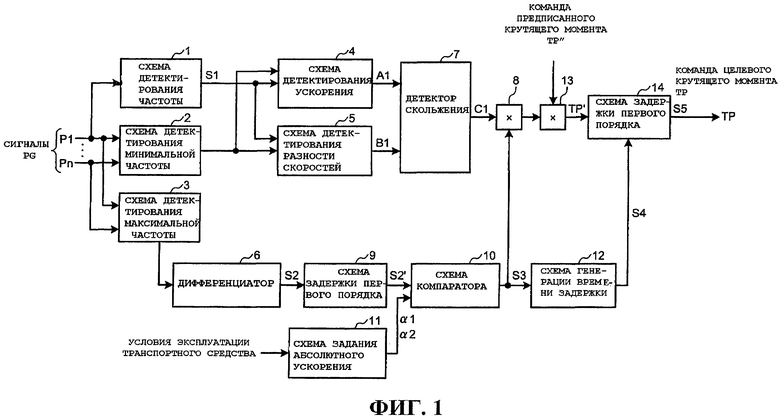
1. Устройство управления вагоном электропоезда, содержащее блок управления, который предназначен для генерирования значения команды целевого крутящего момента для множества двигателей для подавления состояния пробуксовки ведущих колес на основании скоростей вращения двигателей, которые приводят в движение множество осей ведущих колес, при этом блок управления содержит первый блок оценки, который получает с использованием собственно осевых скоростей, которые являются скоростями вращения двигателей, и опорной скорости, которая является минимальной скоростью из скоростей вращения двигателей, отклонение скорости для каждой из собственно осевых скоростей от опорной скорости и отклонение ускорения, и оценивает степень состояния пробуксовки ведущих колес в соответствии с тем, насколько полученные таким образом отклонение скорости и отклонение ускорения превышают пороги, которые определены по отдельности, блок осуществления процесса ограничения, который осуществляет процесс ограничения для снижения значения команды предписанного крутящего момента, которая поступает извне, в соответствии с результатом оценки, полученным первым блоком оценки, второй блок оценки, который определяет первое пороговое значение, которое превышает абсолютное ускорение, определенное в соответствии с условиями эксплуатации транспортного средства по отношению к абсолютному ускорению, и оценивает, превышает ли ускорение собственно осевой скорости, которая является максимальной скоростью, выбранной из скоростей вращения двигателей, первое пороговое значение, и блок обработки выходного сигнала, который выводит значение команды крутящего момента, обработанное блоком осуществления процесса ограничения, в качестве значения команды целевого крутящего момента, когда результатом оценки, полученным вторым блоком оценки, является «отсутствие превышения первого порогового значения», и выводит значение команды целевого крутящего момента, подвергнутое процессу снижения, который осуществляется независимо от результата процесса, полученного блоком осуществления процесса ограничения, когда результатом оценки, полученным вторым блоком оценки, является «превышение первого порогового значения».
2. Устройство управления вагоном электропоезда, содержащее блок управления, предназначенный для генерирования значения команды целевого крутящего момента для множества двигателей для подавления состояния проскальзывания ведущих колес на основании скоростей вращения двигателей, которые приводят в движение множество ведущих колесных осей, при этом блок управления содержит первый блок оценки, который получает, с использованием собственно осевых скоростей, которые являются скоростями вращения двигателей, и опорной скорости, которая является максимальной скоростью из скоростей вращения двигателей, отклонение скорости каждой из собственно осевых скоростей от опорной скорости и отклонение замедления, и оценивает степень состояния проскальзывания ведущих колес в соответствии с тем, насколько полученные таким образом отклонение скорости и отклонение замедления превышают пороговые значения, которые определены по отдельности, блок осуществления процесса ограничения, который осуществляет процесс ограничения для снижения значения команды предписанного крутящего момента, которая поступает извне, в соответствии с результатом оценки, полученным первым блоком оценки, второй блок оценки, который определяет первое пороговое значение, которое превышает абсолютное ускорение, определенное в соответствии с условиями эксплуатации транспортного средства по отношению к абсолютному ускорению, и оценивает, превышает ли замедление собственно осевой скорости, которая является минимальной скоростью, выбранной из скоростей вращения двигателей, первое пороговое значение, и блок обработки выходного сигнала, который выводит значение команды крутящего момента, обработанное блоком осуществления процесса ограничения, в качестве значения команды целевого крутящего момента, когда результатом оценки, полученным вторым блоком оценки, является «отсутствие превышения первого порогового значения», и выводит значение команды целевого крутящего момента, подвергнутое процессу снижения, который осуществляется независимо от результата процесса, полученного блоком осуществления процесса ограничения, когда результатом оценки, полученным вторым блоком оценки, является «превышение первого порогового значения».
3. Устройство управления вагоном электропоезда по п.1 или 2, в котором второй блок оценки сконфигурирован для определения, по отношению к абсолютному ускорению, второго порогового значения, которое ниже абсолютного ускорения, оценки «превышения первого порогового значения», когда ускорение или замедление превышает первое пороговое значение, затем поддержания состояния оценки «превышения первого порогового значения» в течение периода, пока ускорение или замедление не упадет ниже второго порогового значения, и возвращения к состоянию оценки «отсутствия превышения первого порогового значения» после того, как ускорение или замедление упадет ниже второго порогового значения, и блок управления дополнительно содержит блок переключения процесса, который не выдает результат оценки, полученный первым блоком оценки, на блок осуществления процесса ограничения в течение периода оценки, в котором второй блок оценки поддерживает состояние оценки «превышения первого порогового значения», и блок управления процессом, который выдает инструкцию принятия результата процесса от блока осуществления процесса ограничения на блок выходной обработки, когда второй блок оценки находится в состоянии оценки «отсутствия превышения первого порогового значения», и выдает инструкцию запуска процесса снижения на блок выходной обработки, когда второй блок оценки оценивает «превышение первого порогового значения».
4. Устройство управления вагоном электропоезда по п.1 или 2, в котором, когда условия эксплуатации транспортного средства таковы, что устройства управления вагоном электропоезда установлены на поезде, состоящем из вагонов, и в любом из устройств управления вагоном поезда возникает неисправность, абсолютное ускорение, определенное в соответствии с условиями эксплуатации транспортного средства, задается равным максимальному ускорению или максимальному замедлению, которое фактически может быть достигнуто поездом, состоящим из вагонов, с одновременным выявлением неисправности устройства управления вагоном электропоезда с помощью устройства мониторинга транспортного средства.
5. Устройство управления вагоном электропоезда по п.3, в котором, когда условия эксплуатации транспортного средства таковы, что устройства управления вагоном электропоезда установлены на поезде, состоящем из вагонов, и в любом из устройств управления вагоном поезда возникает неисправность, абсолютное ускорение, определенное в соответствии с условиями эксплуатации транспортного средства, задается равным максимальному ускорению или максимальному замедлению, которое фактически может быть достигнуто поездом, состоящим из вагонов, с одновременным выявлением неисправности устройства управления вагоном электропоезда с помощью устройства мониторинга транспортного средства.
6. Устройство управления вагоном электропоезда по п.1 или 2, в котором, когда условия эксплуатации транспортного средства таковы, что устройства управления вагоном электропоезда установлены на поезде, состоящем из вагонов, и принят конкретный режим вождения, абсолютное ускорение, определенное в соответствии с условиями эксплуатации транспортного средства, задается равным максимальному ускорению или максимальному замедлению, которое может быть достигнуто поездом, состоящим из вагонов, в конкретном режиме вождения.
7. Устройство управления вагоном электропоезда по п.3, в котором, когда условия эксплуатации транспортного средства таковы, что устройства управления вагоном электропоезда установлены на поезде, состоящем из вагонов, и принят конкретный режим вождения, абсолютное ускорение, определенное в соответствии с условиями эксплуатации транспортного средства, задается равным максимальному ускорению или максимальному замедлению, которое может быть достигнуто поездом, состоящим из вагонов, в конкретном режиме вождения.
8. Устройство управления вагоном электропоезда по п.1 или 2, в котором, когда условия эксплуатации транспортного средства таковы, что устройства управления вагоном электропоезда установлены на поезде, состоящем из вагонов, и сезон распознан с использованием функции календаря, предусмотренной в устройстве мониторинга транспортного средства, абсолютное ускорение, определенное в соответствии с условиями эксплуатации транспортного средства, задается равным максимальному ускорению или максимальному замедлению, которое может быть достигнуто поездом, состоящим из вагонов, в распознанный сезон.
9. Устройство управления вагоном электропоезда по п.3, в котором, когда условия эксплуатации транспортного средства таковы, что устройства управления вагоном электропоезда установлены на поезде, состоящем из вагонов, и сезон распознан с использованием функции календаря, предусмотренной в устройстве мониторинга транспортного средства, абсолютное ускорение, определенное в соответствии с условиями эксплуатации транспортного средства, задается равным максимальному ускорению или максимальному замедлению, которое может быть достигнуто поездом, состоящим из вагонов, в распознанный сезон.
10. Устройство управления вагоном электропоезда, содержащее блок управления, предназначенный для генерирования значения команды целевого крутящего момента для множества двигателей для подавления состояния пробуксовки ведущих колес на основании скоростей вращения двигателей, которые приводят в движение множество осей ведущих колес, при этом блок управления содержит первый блок оценки, который получает, с использованием собственно осевых скоростей, которые являются скоростями вращения двигателей, и опорной скорости, которая является минимальной скоростью из скоростей вращения двигателей, отклонение скорости для каждой из собственно осевых скоростей от опорной скорости и отклонение ускорения, и определяет степень состояния пробуксовки ведущих колес в соответствии с тем, насколько полученные таким образом отклонение скорости и отклонение ускорения превышают пороговые значения, которые определены по отдельности, блок осуществления процесса ограничения, который осуществляет процесс ограничения для снижения значения команды предписанного крутящего момента, которая поступает извне, в соответствии с результатом оценки, полученным первым блоком оценки, второй блок оценки, который сконфигурирован для определения первого порогового значения, которое превышает абсолютное ускорение, определенное в соответствии с условиями эксплуатации транспортного средства, и второго порогового значения, которое ниже абсолютного ускорения, по отношению к абсолютному ускорению, оценки «превышения первого порогового значения», когда ускорение собственно осевой скорости, которая является максимальной скоростью, выбранной из скоростей вращения двигателей, превышает первое пороговое значение, затем поддержания состояния оценки «превышения первого порогового значения» в течение периода, пока ускорение не упадет ниже второго порогового значения, и возвращения к состоянию оценки «отсутствия превышения первого порога» после того, как ускорение упадет ниже второго порогового значения, блок переключения процесса, который препятствует подаче результата оценки, полученного первым блоком оценки, на блок осуществления процесса ограничения в течение периода оценки, в котором второй блок оценки поддерживает состояние оценки «превышения первого порогового значения», блок управления (диспетчеризации) процессом, который выдает инструкцию принятия результата процесса от блока осуществления процесса ограничения, когда второй блок оценки находится в состоянии оценки «отсутствия превышения первого порогового значения», и выдает инструкцию запуска процесса и обеспечивает период обработки более длительный, чем период оценки, в котором второй блок оценки оценивает «превышение первого порога», и блок обработки выходного сигнала, который выводит, в ответ на инструкцию принятия, значение команды крутящего момента, обработанное блоком осуществления процесса ограничения, в качестве значения команды целевого крутящего момента, осуществляет, в ответ на инструкцию запуска процесса, процесс плавного снижения значения команды целевого крутящего момента, которая выведена непосредственно до этого, к заранее определенному минимальному значению в начальный момент периода обработки, и запускает процесс плавного увеличения значения команды целевого крутящего момента от заранее определенного минимального значения к значению команды крутящего момента, поступающей от блока осуществления процесса ограничения, в конечный момент периода обработки, и, таким образом, выводит значение команды целевого крутящего момента, подвергнутое процессу снижения, который осуществляется независимо от результата процесса, полученного блоком осуществления процесса ограничения.
11. Устройство управления вагоном электропоезда, содержащее блок управления, предназначенный для генерирования значения команды целевого крутящего момента для множества двигателей для подавления состояния проскальзывания ведущих колес на основании скоростей вращения двигателей, которые приводят в движение множество осей ведущих колес, при этом блок управления содержит первый блок оценки, который получает, с использованием собственно осевых скоростей, которые являются скоростями вращения двигателей, и опорной скорости, которая является максимальной скоростью из скоростей вращения двигателей, отклонение скорости каждой из собственно осевых скоростей от опорной скорости и отклонение замедления, и оценивает степень состояния проскальзывания ведущих колес в соответствии с тем, насколько полученные таким образом отклонение скорости и отклонение замедления превышают пороговые значения, которые определены по отдельности, блок осуществления процесса ограничения, который осуществляет процесс ограничения для снижения значения команды предписанного крутящего момента, которая поступает извне, в соответствии с результатом оценки, полученным первым блоком оценки, второй блок оценки, который сконфигурирован для определения первого порогового значения, которое превышает абсолютное ускорение, определенное в соответствии с условиями эксплуатации транспортного средства, и второго порогового значения, которое ниже абсолютного ускорения, по отношению к абсолютному ускорению, оценки «превышения первого порогового значения», когда замедление собственно осевой скорости, которая является минимальной скоростью, выбранной из скоростей вращения двигателей, превышает первое пороговое значение, затем поддержания состояния оценки «превышения первого порогового значения» в течение периода, пока замедление не упадет ниже второго порогового значения, и возвращения к состоянию оценки «отсутствия превышения первого порогового значения» после того, как замедление упадет ниже второго порогового значения, блок переключения процесса, который препятствует подаче результата оценки, полученного первым блоком оценки, на блок осуществления процесса ограничения в течение периода оценки, в котором второй блок оценки поддерживает состояние оценки «превышения первого порогового значения», блок управления (диспетчеризации) процессом, который выдает инструкцию принятия результата процесса от блока осуществления процесса ограничения, когда второй блок оценки находится в состоянии оценки «отсутствия превышения первого порогового значения», и выдает инструкцию запуска процесса и обеспечивает период обработки более длительный, чем период оценки, в котором второй блок оценки оценивает «превышение первого порогового значения», и блок обработки выходного сигнала, который выводит, в ответ на инструкцию принятия, значение команды крутящего момента, обработанное блоком осуществления процесса ограничения, в качестве значения команды целевого крутящего момента, осуществляет, в ответ на инструкцию запуска процесса, процесс плавного снижения значения команды целевого крутящего момента, которая выведена непосредственно до этого к заранее определенному минимальному значению в начальный момент периода обработки и запускает процесс плавного увеличения значения команды целевого крутящего момента от заранее определенного минимального значения к значению команды крутящего момента, поступающей от блока осуществления процесса ограничения, в конечный момент периода обработки, и, таким образом, выводит значение команды целевого крутящего момента, подвергнутое процессу снижения, который осуществляется независимо от результата процесса, полученного блоком осуществления процесса ограничения.
12. Устройство управления вагоном электропоезда по п.10 или 11, в котором, когда условия эксплуатации транспортного средства таковы, что устройства управления вагоном электропоезда установлены на поезде, состоящем из вагонов, и в любом из устройств управления вагоном поезда возникает неисправность, абсолютное ускорение, определенное в соответствии с условиями эксплуатации транспортного средства, задается равным максимальному ускорению или максимальному замедлению, которое фактически может быть достигнуто поездом, состоящим из вагонов, с одновременным выявлением неисправности устройства управления вагоном электропоезда с помощью устройства мониторинга транспортного средства.
13. Устройство управления вагоном электропоезда по п.10 или 11, в котором, когда условия эксплуатации транспортного средства таковы, что устройства управления вагоном электропоезда установлены на поезде, состоящем из вагонов, и принят конкретный режим вождения, абсолютное ускорение, определенное в соответствии с условиями эксплуатации транспортного средства, задается равным максимальному ускорению или максимальному замедлению, которое может быть достигнуто поездом, состоящим из вагонов, в конкретном режиме вождения.
14. Устройство управления вагоном электропоезда по п.10 или 11, в котором, когда условия эксплуатации транспортного средства таковы, что устройства управления вагоном электропоезда установлены на поезде, состоящем из вагонов, и сезон распознан с использованием функции календаря, предусмотренной в устройстве мониторинга транспортного средства, абсолютное ускорение, определенное в соответствии с условиями эксплуатации транспортного средства, задается равным максимальному ускорению или максимальному замедлению, которое может быть достигнуто поездом, состоящим из вагонов, в распознанный сезон.
| JP 11089005 А, 30.03.1999 | |||
| JP 2003164016 А, 06.06.2003 | |||
| US 6152546 А, 28.11.2000 | |||
| Замасливатель для поликапроамидныхНиТЕй | 1978 |
|
SU794097A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМ ПОДВИЖНЫМ СОСТАВОМ | 2000 |
|
RU2179515C2 |
| Устройство для импульсного регулирования электропривода подвижного состава | 1974 |
|
SU481472A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |

