ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение, в общем, относится к управляющему устройству для железнодорожных вагонов с электроприводом, в частности к управляющему устройству для железнодорожных вагонов с электроприводом, которое имеет функцию управления пробуксовкой/проскальзыванием, чтобы не допускать свободного проворачивания и проскальзывания колес.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В качестве управляющего устройства для железнодорожных вагонов с электроприводом уже введены в практическое применение системы, которые приводят в движение и управляют электродвигателем переменного тока посредством использования инвертора. Хорошо известно, что ускорения и замедления железнодорожных вагонов реализуются посредством мощностей, которые передаются между железными рельсами и железными колесами в пределах небольших контактных поверхностей между ними. Таким образом, управляющее устройство для железнодорожных вагонов с электроприводом должно управлять крутящим моментом электродвигателя надлежащим образом так, чтобы колеса не проворачивались свободно. Другими словами, если крутящий момент является слишком высоким, колеса свободно проворачиваются, и коэффициент трения (в дальнейшем в этом документе он также может упоминаться как "коэффициент сцепления") между колесами и рельсами снижается, так что КПД передачи мощностей также снижается. Как результат, возникают проблемы в том, что железнодорожные вагоны с электроприводом не могут ускоряться надлежащим образом, и что колеса и рельсы изнашиваются. Наоборот, если крутящий момент является слишком низким, хотя колеса не проворачиваются свободно, железнодорожные вагоны с электроприводом не могут ускоряться надлежащим образом, и для железнодорожных вагонов с электроприводом становится трудно двигаться по графику. Кроме того, возникают такие же проблемы, когда используется рекуперативный тормоз.
Традиционно управляющие устройства для железнодорожных вагонов с электроприводом имеют систему управления пробуксовкой для предотвращения явления пробуксовки колес, как описано выше. Вообще говоря, такая система управления пробуксовкой конфигурирована для определения состояния пробуксовки колес посредством использования изменения скоростей колес и отклонения скорости для множества колес и для регулирования крутящего момента электродвигателя. Тем не менее возможно наличие между рельсами и колесами дождя, снега, песка и смазки. Помимо этого, коэффициент сцепления постоянно существенно изменяется согласно состоянию поверхностей рельсов и колес, температуре и скорости движения железнодорожных вагонов с электроприводом. Таким образом, физические процессы между рельсами и колесами являются сложными, и трудно сформулировать закон управления. Поэтому существует большое число способов, которые могут использоваться для управления пробуксовкой, предложенных на основе теоретических исследований с различных точек зрения и данных от испытательных пробегов с использованием реальных железнодорожных вагонов с электроприводом (см., например, выложенную заявку на патент Японии № H06-335106).
Традиционные технологии, описанные выше, тем не менее, имеют следующие недостатки. В системах железнодорожного сообщения, таких как поезда местного сообщения в Японии, легко распознавать явление пробуксовки/проскальзывания на основе темпов изменения скоростей колес и отклонения скорости для множества колес, поскольку темпы изменения скоростей колес являются относительно высокими и отклонение скорости для колес также является относительно большим, когда колеса свободно проворачиваются или проскальзывают. Тем не менее, в то время когда железнодорожный вагон с электроприводом движется на высокой скорости (например, приблизительно 200 километров в час или выше) в высокоскоростной железнодорожной системе, темпы изменения скоростей колес являются низкими, и отклонение скорости для множества колес также является небольшим, когда возникает пробуксовка/проскальзывание. Таким образом, остается проблема в том, что трудно распознавать явление пробуксовки/проскальзывания на основе темпов изменения скоростей колес и отклонения скорости колес и трудно отличать случай, когда железнодорожный вагон с электроприводом находится в состоянии ускорения в ходе обычного движения, от случая, когда возникает пробуксовка/проскальзывание.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является создание управляющего устройства для железнодорожного вагона с электроприводом, позволяющего определять явление пробуксовки/проскальзывания в ходе, в частности, высокоскоростного движения и осуществлять управление пробуксовкой/проскальзыванием надлежащим образом.
Для решения вышеуказанных проблем предложено управляющее устройство для железнодорожного вагона с электроприводом согласно одному аспекту настоящего изобретения, имеющее конструкцию, включающую в себя множество электродвигателей и модуль управления пробуксовкой/проскальзыванием, который формирует значение команды управления крутящим моментом, чтобы предотвращать пробуксовку или проскальзывание, на основе скоростей вращения множества электродвигателей, при этом модуль управления пробуксовкой/проскальзыванием включает в себя: модуль вычисления опорной скорости вращения, который вычисляет первую опорную скорость вращения и вторую опорную скорость вращения посредством использования скоростей вращения множества электродвигателей; модули формирования первого индекса уровня сцепления, которые предоставляются согласно электродвигателям, соответственно, и каждый из модулей формирования первого индекса уровня сцепления принимает, в качестве входного сигнала, первую опорную скорость вращения и скорость вращения соответствующего одного из электродвигателей и формирует первый индекс уровня сцепления, который является индексом для уровня сцепления между колесом, которое соединено с соответствующим электродвигателем, и поверхностью, которая придавливается колесом, на основе отклонения ускорения, которое является разностью между ускорением, вычисленным посредством использования скорости вращения соответствующего электродвигателя, и ускорением, вычисленным посредством использования первой опорной скорости вращения, и на основе отклонения скорости, которое является разностью между скоростью вращения соответствующего электродвигателя и первой опорной скоростью вращения; модуль формирования второго индекса уровня сцепления, который принимает, в качестве входного сигнала, вторую опорную скорость вращения и формирует значение второго индекса уровня сцепления посредством умножения значения первого индекса уровня сцепления на коэффициент усиления, который сформирован на основе ускорения, вычисленного посредством использования второй опорной скорости вращения; и модуль формирования значения команды управления крутящим моментом, который формирует значение команды управления крутящим моментом на основе значения второго индекса уровня сцепления.
Согласно аспекту настоящего изобретения, даже в случае, когда пробуксовка или проскальзывание возникают в ходе высокоскоростного движения, и когда отклонение ускорения и отклонение скорости являются небольшими, так что неэффективно осуществлять управление пробуксовкой или проскальзыванием посредством регулирования крутящего момента на основе первого индекса уровня сцепления, можно осуществлять управление пробуксовкой или проскальзыванием надлежащим образом посредством задания коэффициента усиления, сформированного посредством модуля формирования второго индекса уровня сцепления, равным заранее определенному значению, меньшему 1. Как результат, достигается преимущество, что без необходимости дополнительного использования новой информации о скорости вращения неведущих валов и т.п. можно распознавать явление пробуксовки/проскальзывания только на основе информации о скорости вращения ведущих валов, соединенных с колесами, чтобы определять состояние пробуксовки/проскальзывания до того, как скорость становится значительно отличающейся от действительного значения, и осуществлять управление пробуксовкой/проскальзыванием надлежащим образом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
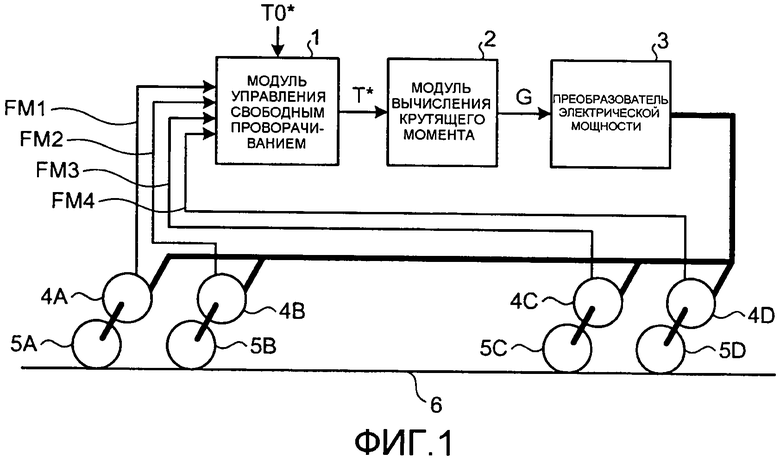
фиг.1 изображает схему управляющего устройства для железнодорожного вагона с электроприводом согласно варианту осуществления настоящего изобретения;
фиг.2 изображает схему модуля управления пробуксовкой согласно варианту осуществления;
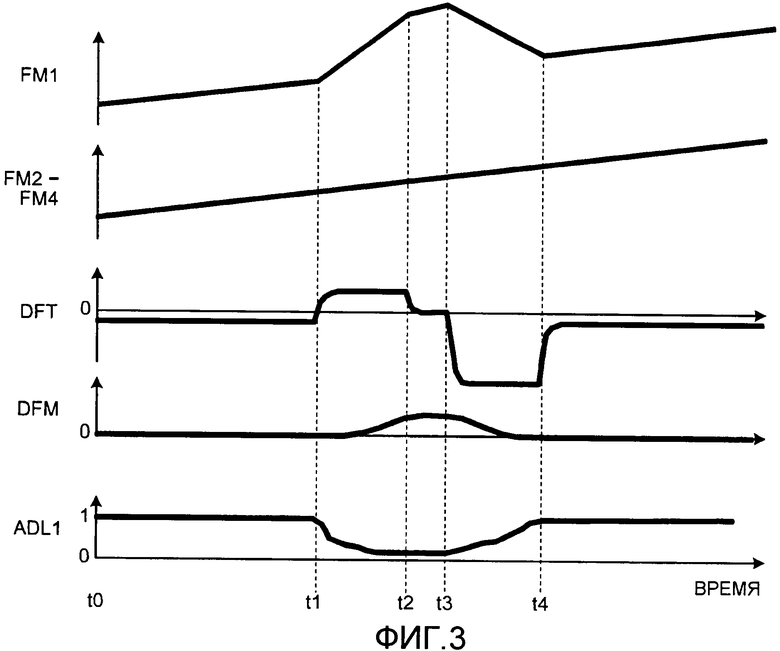
фиг.3 изображает рабочие диаграммы отклонения DFM скорости, отклонения DFT ускорения и индекса ADL1 уровня сцепления в случае, когда колесо 5A, соединенное с первым валом, свободно проворачивается;
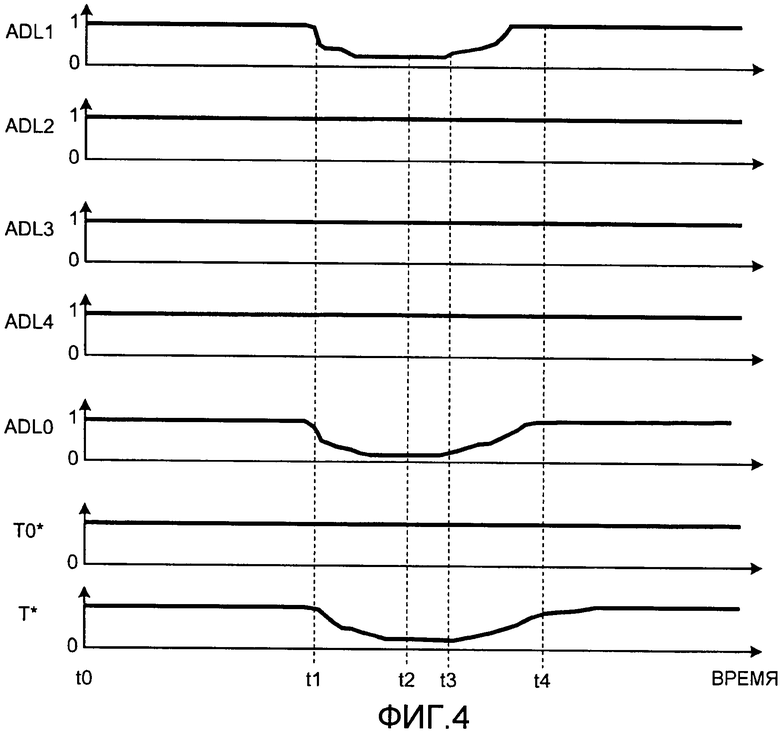
фиг.4 изображает рабочие диаграммы индексов ADL1-ADL4 уровня сцепления взаимно различных валов, индекса ADL0 уровня сцепления, к которому применен процесс максимального значения, команды T0* управления крутящим моментом, соответствующей установившемуся периоду, и команды T* управления крутящим моментом, которая отрегулирована посредством управления пробуксовкой;
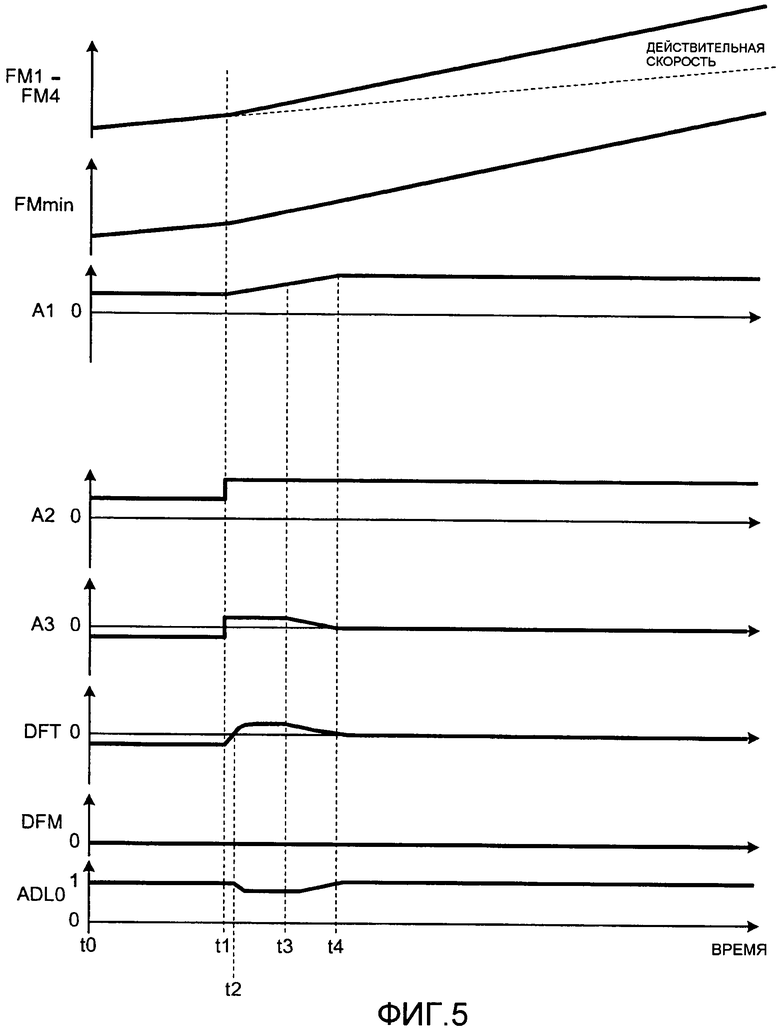
фиг.5 изображает рабочие диаграммы модуля 7A вычисления первого индекса уровня сцепления в случае, когда возникает незначительная пробуксовка;
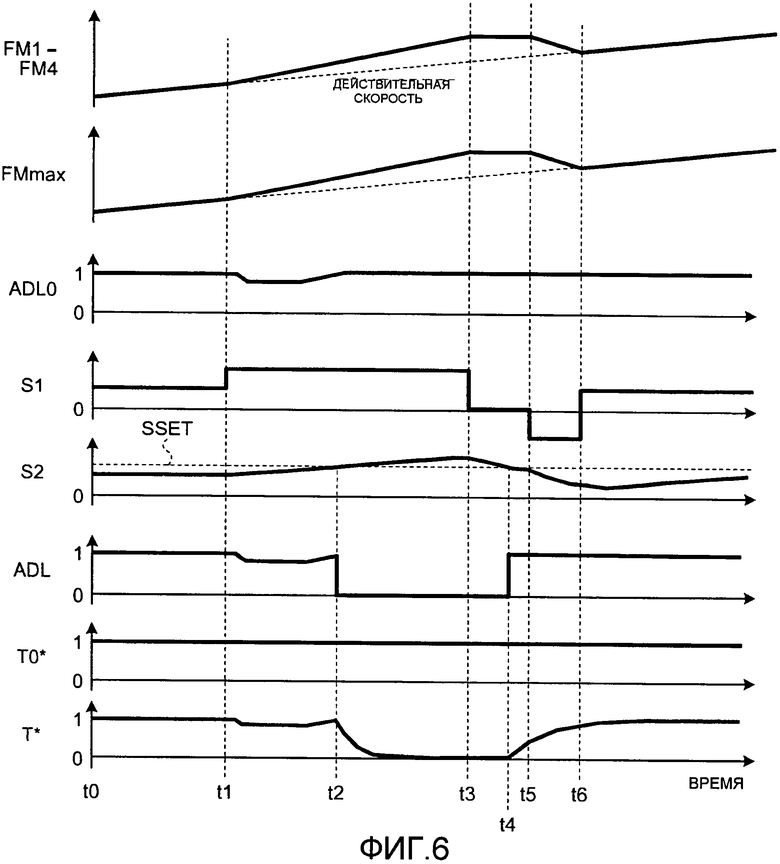
фиг.6 изображает рабочие диаграммы уровней FM1-FM4, FMmax, ADL0, S1, S2, ADL, T0* и T* в случае, когда функционирует модуль вычисления второго индекса уровня сцепления.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ ИЗОБРЕТЕНИЯ
Примерные варианты осуществления управляющего устройства для железнодорожного вагона с электроприводом согласно настоящему изобретению подробно поясняются со ссылками на прилагаемые чертежи. Изобретение не ограничено примерными вариантами осуществления. Хотя управление пробуксовкой поясняется ниже, то же применимо к управлению проскальзыванием.
На фиг.1 показана схема управляющего устройства для железнодорожного вагона с электроприводом согласно варианту осуществления настоящего изобретения. На фиг.2 показана схема модуля управления пробуксовкой согласно варианту осуществления.
Сначала поясняется конфигурация управляющего устройства для железнодорожного вагона с электроприводом согласно варианту осуществления со ссылкой на фиг.1. Управляющий модуль 1 выполняет управление крутящим моментом, чтобы разрешать состояние пробуксовки или проскальзывания. В следующих разделах, для упрощения описания, управляющий модуль упоминается просто как "модуль управления пробуксовкой". Значение T0* управления крутящим моментом, соответствующее состоянию без пробуксовки, вводится в модуль 1 управления пробуксовкой. После того как вычисление выполнено для значения T0* команды управления крутящим моментом, когда учитывается состояние пробуксовки, модуль 1 управления пробуксовкой выводит значение T* команды управления крутящим моментом. Модуль 2 вычисления крутящего момента принимает, в качестве входного сигнала, значение T* команды управления крутящим моментом и выводит выходной сигнал G управления вентилем. Преобразователь 3 электрической мощности управляется на основе выходного сигнала G управления вентилем, который является выходным сигналом модуля 2 вычисления крутящего момента. В примере, показанном на фиг.1, множество электродвигателей 4A-4D совместно приводятся в движение.
Электродвигатели 4A-4D соединены с валами колес 5A-5D, соответственно, и заставляют колеса 5A-5D вращаться. Вследствие сил трения, формируемых между колесами 5A-5D и рельсом 6, железнодорожный вагон с электроприводом получает тяговый коэффициент усиления через вращения колес 5A-5D. Дополнительно, ссылки с номером FM1-FM4 обозначают сигналы скорости, определяемые посредством датчиков (не показаны), которые установлены на электродвигателях 4A-4D, соответственно. Сигналы FM1-FM4 скорости указывают скорости вращения валов электродвигателей 4A-4D, соответственно.
Далее поясняется конфигурация модуля 1 управления пробуксовкой со ссылкой на фиг.2. Модули 7А-7D формирования первого индекса уровня сцепления формируют индексы ADL1-ADL4 уровня сцепления, которые являются индексами уровней сцепления между колесами 5A-5D и рельсом 6, соответственно. Модуль 8 формирования второго индекса уровня сцепления предусматривается отдельно от модулей 7A-7D формирования первого индекса уровня сцепления. Модуль 9 вычисления максимального значения выводит максимальное значение FMmax из скоростей FM1-FM4 вращения. Модуль 10 вычисления минимального значения выводит минимальное значение FMmin из скоростей FM1-FM4 вращения. Модуль 9 вычисления максимального значения и модуль 10 вычисления минимального значения предусмотрены в рамках модуля 12 вычисления опорной скорости вращения. Модуль 12 вычисления опорной скорости вращения выводит FMmin в каждый из модулей 7A-7D формирования первого индекса уровня сцепления, а также выводит FMmax в модуль 8 формирования второго индекса уровня сцепления. В описываемом варианте осуществления модуль 12 вычисления опорной скорости вращения вычисляет минимальное значение FMmin и максимальное значение FMmax на основе скоростей FM1-FM4 вращения. Тем не менее, настоящее изобретение не ограничено этим. Любая другая компоновка является также приемлемой до тех пор, пока две опорных скорости вращения получаются на основе скоростей FM1-FM4 вращения.
Два сигнала, представляющие FMmin и скорость FM1 вращения, вводятся в модуль 7A формирования первого индекса уровня сцепления. Аналогично, два сигнала, представляющие FMmin и скорость FM2 вращения, вводятся в модуль 7B формирования первого индекса уровня сцепления. Кроме того, два сигнала, представляющие FMmin и скорость FM3 вращения, вводятся в модуль 7C формирования первого индекса уровня сцепления. Дополнительно, два сигнала, представляющие FMmin и скорость FM4 вращения, вводятся в модуль 7D формирования первого индекса уровня сцепления. FMmax вводится в модуль 8 формирования второго индекса уровня сцепления.
Далее поясняется модуль 7A формирования первого индекса уровня сцепления. Каждый из модулей 7B-7D формирования первого индекса уровня сцепления аналогичен модулю 7A формирования первого индекса уровня сцепления. Дифференциатор 11 принимает, в качестве входного сигнала, скорость FM1 вращения и выводит ускорение A1, которое является величиной изменения скорости FM1 вращения во времени. Другой дифференциатор 13 принимает, в качестве входного сигнала, FMmin и выводит ускорение A2, которое является величиной изменения FMmin во времени. Дифференциатор 11 и дифференциатор 13 составляют модуль 29 вычисления ускорения, выступающий в качестве первого модуля вычисления ускорения. Посредством использования ускорения A1 и ускорения A2 модуль 14 вычитания выводит A3 (=A2-A1). Фильтр 15 нижних частот принимает, в качестве входного сигнала, A3 и выводит отклонение DFT ускорения. Период дискретизации вычисления дифференциатора 11 задается меньшим, тогда как период дискретизации вычисления дифференциатора 13 задается большим. Модуль 14 вычитания и фильтр 15 нижних частот составляют процессорный модуль 30 отклонения ускорения.
Другой модуль 16 вычитания выводит разность между скоростью FM1 вращения и FMmin как разность V1 скоростей. Другой фильтр 17 нижних частот принимает, в качестве входного сигнала, разность V1 скоростей и выводит отклонение DFM скорости. Модуль 16 вычитания и фильтр 17 нижних частот составляют процессорный модуль 31 отклонения дифференциальной скорости.
В конфигурации, описанной выше, ускорение A1 - это ускорение скорости FM1 вращения первого вала, который является валом электродвигателя 4A, и является мгновенным ускорением. Напротив, ускорение A2 - это ускорение FMmin, которое является наименьшей скоростью вращения из скоростей вращения колес 5A-5D и является опорным ускорением, которое практически не имеет мгновенного изменения. Как описано выше, поскольку период дискретизации вычисления дифференциатора 13 задается большим, ускорение A1 практически не имеет мгновенного изменения. Таким образом, можно использовать ускорение A2 в качестве опорного ускорения. Отклонение DFT ускорения может получаться посредством применения процесса задержки первого порядка в фильтре 15 нижних частот к разности A3 между ускорением A2, которое используется в качестве опорного ускорения, и ускорением A1, которое является мгновенным значением. Дополнительно, отклонение DFM скорости может получаться посредством применения процесса задержки первого порядка в фильтре 17 нижних частот к разности V1 скоростей, которая является разностью между скоростью FM1 вращения первого вала и FMmin.
Устройство 18 оценки принимает, в качестве входного сигнала, отклонение DFT ускорения и отклонение DFM скорости и выводит индекс ADL1 уровня сцепления первого вала в соответствии "один-к-одному" на основе комбинации значений входного сигнала. Другими словами, устройство 18 оценки оценивает состояние уровня сцепления на основе отклонения DFT ускорения и отклонения DFM скорости и выводит индекс ADL1 уровня сцепления, указывающий состояние сцепления, например, посредством сравнения отклонения DFT ускорения и отклонения DFM скорости с заранее определенным отношением.
На фиг.3 показана рабочая диаграмма отклонения DFM скорости, отклонения DFT ускорения и индекса ADL1 уровня сцепления в случае, когда колесо 5A, соединенное с первым валом, свободно проворачивается. Горизонтальная ось выражает время, показаны временные изменения скоростей FM1-FM4 вращения, отклонения DFM скорости, отклонения DFT ускорения и индекса ADL1 уровня сцепления. Между временем t1 и временем t4, по меньшей мере, одно из отклонений (т.е. одно или оба из отклонения DFM скорости и отклонения DFT ускорения) увеличивается. Соответственно, индекс ADL1 уровня сцепления имеет значение, меньшее 1. В частности, при анализе индекса ADL1 уровня сцепления между временем t2 и временем t3 следует понимать, что влияние отклонения DFT ускорения преобладает в большей степени, чем влияние отклонения DFM скорости. Следует отметить, что когда индекс уровня сцепления равен 1, определяется то, что колесо не проворачивается свободно. Это определяет то, что чем ниже индекс уровня сцепления чем 1, тем больше колесо свободно проворачивается.
Тот же процесс выполняется для каждого из модулей 7B-7D формирования первого индекса уровня сцепления. Тем самым получаются индексы ADL2-ADL4 уровня сцепления.
Выходные сигналы модулей 7A-7D формирования первого индекса уровня сцепления вводятся в процессорный модуль 25 ADL. Другими словами, процессорный модуль 25 ADL принимает, в качестве входных сигналов, индексы ADL1-ADL4 уровня сцепления и после выполнения, например, процесса выбора максимального значения или процесса усреднения для них процессорный модуль 25 ADL выводит результат как индекс ADL0 уровня сцепления. В этом случае процесс выбора максимального значения - это процесс выбора такого значения индекса из индексов ADL1-ADL4 уровня сцепления, которое имеет наибольшее изменение относительно 1. Процесс усреднения - это процесс выбора среднего значения индексов ADL1-ADL4 уровня сцепления.
Модуль 28 задержки первого порядка вызывает задержку первого порядка. Постоянная времени, используемая посредством модуля 28 задержки первого порядка, упоминается как τ. Индекс ADL0 уровня сцепления, который выведен из процессорного модуля 25 ADL, умножается на коэффициент усиления в умножителе 26, как пояснено ниже, и дополнительно умножается в умножителе 27 на значение команды T0* управления крутящим моментом, соответствующее установившемуся периоду, на основе команды операции. Результат затем вводится в модуль 28 задержки первого порядка, где задержка первого порядка применяется к нему, и далее выводится из модуля 1 управления пробуксовкой в качестве команды T* управления крутящим моментом.
В то время когда колесо не проворачивается свободно, индекс ADL0 уровня сцепления равен 1. Напротив, в то время когда колесо находится в состоянии пробуксовки, индекс ADL0 уровня сцепления имеет значение, равное или меньшее 1, на основе комбинации отклонения DFT ускорения и отклонения DFM скорости. Таким образом, удовлетворяется T0*>T*, так что крутящий момент понижается на "T0*-T*". Постоянная времени, используемая для понижения или восстановления крутящего момента, регулируется посредством использования постоянной времени τ, используемой посредством модуля 28 задержки первого порядка.
На фиг.4 показана рабочая диаграмма индексов ADL1-ADL4 уровня сцепления валов, индекса ADL0 уровня сцепления, к которому применен процесс выбора максимального значения, команды T0* управления крутящим моментом, соответствующей установившемуся периоду, и команды T* управления крутящим моментом, которая отрегулирована посредством управления пробуксовкой. Как показано на фиг.4, команда T* управления крутящим моментом выводится с точным регулированием согласно изменениям индекса ADL0 уровня сцепления.
В операции, описанной выше, можно устанавливать настройку, когда отклонение DFT ускорения преобладает в большей степени с точки зрения чувствительности к управлению пробуксовкой, чтобы заставлять отклонение ускорения сходиться посредством более точного регулирования скорости реагирования или разрешающей способности опорного ускорения. Таким образом, посредством использования отклонения DFM скорости и отклонения DFT ускорения можно быстро и с точным регулированием осуществлять управление сцеплением.
В описываемом варианте осуществления процессорный модуль 25 ADL выводит один индекс ADL0 уровня сцепления на основе индексов ADL1-ADL4 уровня сцепления так, что команда T* управления крутящим моментом выводится согласно индексу ADL0 уровня сцепления. Другими словами, крутящие моменты этих четырех электродвигателей 4A-4D совместно управляются посредством использования команды T* управления крутящим моментом. Тем не менее, также является приемлемой другая компоновка, в которой четыре команды управления крутящим моментом согласно индексам ADL1-ADL4 уровня сцепления выводятся без использования процессорного блока 25 ADL так, что крутящие моменты этих четырех электродвигателей 4A-4D управляются по отдельности посредством использования этих четырех команд управления крутящим моментом, соответственно.
Далее поясняется работа модуля 8 формирования второго индекса уровня сцепления. Еще один дифференциатор 19 принимает, в качестве входного сигнала, FMmax, выводимое из модуля 9 вычисление максимального значения, и выводит ускорение S1. Другой фильтр 20 нижних частот принимает, в качестве входного сигнала, ускорение S1 и выводит ускорение S2. Дифференциатор 19 и фильтр 20 нижних частот составляют модуль 32 снижения чувствительности к ускорению, выступающий в качестве второго модуля вычисления ускорения. Другими словами, посредством задания интервала вычисления дифференциатора 19 большим и/или посредством замедления реагирований фильтра 20 нижних частот ускорение S2, которое является выходным сигналом модуля 32 снижения чувствительности к ускорению, выполнено с возможностью изменяться не сразу в ответ на незначительное или мгновенное изменение ускорения. В частности, скорость реагирования на ускорение, вычисленная посредством модуля 32 снижения чувствительности к ускорению, сконфигурирована так, чтобы быть ниже скорости реагирования на ускорение, вычисленной посредством модуля 29 вычисления ускорения.
Компаратор 21 сравнивает ускорение S2 с уровнем SSET определения ускорения. Когда компаратор 21 определил, что ускорение S2 превышает уровень SSET определения ускорения, выходной сигнал S3 компаратора 21 указывает уровень "H" (т.е. высокий уровень). Напротив, когда компаратор 21 определил, что ускорение S2 равно или меньше уровня SSET определения ускорения, выходной сигнал S3 компаратора 21 указывает уровень "L" (т.е. низкий уровень). Например, "1" может использоваться в качестве выходного сигнала, указывающего уровень "H", тогда как "0" может использоваться в качестве выходного сигнала, указывающего уровень "L". Уровень SSET определения ускорения - это заранее определенное значение, которое задается для каждого железнодорожного вагона с электроприводом. Также допустимо конфигурировать уровень SSET определения ускорения так, чтобы он был переменным. Как пояснено ниже, компаратор 21 выступает в качестве модуля 33 определения пробуксовки.
Каждый из инверторов 22 и 23 инвертирует принимаемый входной сигнал и выводит результат инвертирования. Позиция 24 обозначает модуль задержки с отключением. Выходной сигнал S3 компаратора 21 вводится в инвертор 22, так что инвертор 22 выводит S4. Выходной сигнал S4, который является выходным сигналом инвертора 22, вводится в умножитель 26, а также вводится в инвертор 23.
Например, в случае, когда выходной сигнал S3 указывает уровень "H", выходной сигнал S4 указывает уровень "L". Соответственно, выходной сигнал S4, имеющий значение, указывающее уровень "L", вводится в умножитель 26 так, что индекс ADL0 уровня сцепления умножается на значение выходного сигнала S4 (в дальнейшем в этом документе "коэффициент усиления"). Значение, указывающее уровень "L", используемый в умножении, выполняемом в умножителе 26, например, равно "0". Тем не менее, настоящее изобретение не ограничено этим. Допустимо конфигурировать значение, указывающее уровень "L", чтобы оно было произвольным значением, равным или меньшим "1". Таким образом, можно конфигурировать коэффициент усиления так, чтобы он был, например, значением, равным или меньшим "1". В случае, когда коэффициент усиления задан как значение, равное или меньшее "1", сумма значения, соответствующего случаю, когда выходной сигнал S4 указывает уровень "L", и значения, соответствующего случаю, когда выходной сигнал S4 указывает уровень "H", сконфигурирована так, чтобы равняться "1". В случае, когда выходной сигнал S4 равен "0", индекс ADL уровня сцепления, который является выходным сигналом умножителя 26, равен "0". Соответственно, выходной сигнал умножителя 27 также равен "0". Другими словами, в случае, когда ускорение S2 превышает уровень SSET определения ускорения, управление пробуксовкой осуществляется посредством вывода "0" в качестве команды T* управления крутящим моментом.
Напротив, в случае, когда ускорение S2 равно или меньше уровня SSET определения ускорения, выходной сигнал S3 указывает уровень "L", тогда как выходной сигнал S4 указывает уровень "H". В этом случае коэффициент усиления, например, равен "1". Соответственно, индекс ADL уровня сцепления, который является выходным сигналом умножителя 26, равен "ADL0". Таким образом, команда T* управления крутящим моментом определяется посредством выходных сигналов модулей 7A-7D формирования первой команды уровня сцепления. Инверторы 22 и 23 составляют модуль 34 формирования коэффициента усиления посредством использования выходного сигнала модуля 33 определения пробуксовки. Согласно варианту осуществления, значение коэффициента усиления может изменяться в зависимости от того, какое из ускорения S2 и уровня SSET определения ускорения является большим. Тем не менее, другая компоновка также является приемлемой, например, в которой значение коэффициента усиления может изменяться в зависимости от того, какое из ускорения S2 и двух уровней определения ускорения является наибольшим и вторым по величине. Например, допустим, что эти два уровня определения ускорения упоминаются как первый уровень определения ускорения и второй уровень определения ускорения, который меньше первого уровня определения ускорения. В этом случае можно конфигурировать значение коэффициента усиления так, чтобы оно было большим в соответствии со следующими тремя диапазонами в установленном порядке: (i) диапазон, в котором ускорение S2 равно или превышает первый уровень определения ускорения; (ii) диапазон, в котором ускорение S2 равно или превышает второй уровень определения ускорения, но меньше первого уровня определения ускорения; и (iii) диапазон, в котором ускорение S2 меньше второго уровня определения ускорения.
Выходной сигнал S4 также вводится в инвертор 23, и выходной сигнал инвертора 23 вводится в модуль 24 задержки с отключением. Выходной сигнал S5 модуля 24 задержки с отключением вводится в модуль 28 задержки первого порядка. В этом случае, когда выходной сигнал S5 модуля 24 задержки с отключением в какой-то момент достигает уровня "H", например, состояние уровня "H" сохраняется в течение заранее определенного периода времени, так что сигнал, указывающий уровень "H", продолжает выводиться в модуль 28 задержки первого порядка. В то время, пока выходной сигнал S5 находится на уровне "H", постоянная времени τ, используемая посредством модуля 28 задержки первого порядка, изменяется и задается равной заранее определенному значению. Как поясняется здесь, модуль 24 задержки с отключением выступает в качестве модуля 35 задания постоянной времени.
Даже если уровень SSET определения ускорения конфигурирован с небольшим превышением нормального ускорения, выходной сигнал S3, который является выходным сигналом компаратора 21, остается на уровне "L" в нормальном состоянии, где колесо не проворачивается свободно, или в нормальном состоянии пробуксовки, где ускорение изменяется мгновенно. Причина этого может поясняться следующим образом. Вследствие функции модуля 32 снижения чувствительности к ускорению, реагирование на изменения ускорения задано более медленным. Таким образом, даже если ускорение FMmax превышает уровень SSET определения ускорения, ускорение S2 остается равным или меньшим уровня SSET определения ускорения. Поскольку выходной сигнал S3 остается на уровне "L", выходной сигнал S4 остается на уровне "H", тогда как выходной сигнал S5 остается на уровне "L". Таким образом, индекс ADL уровня сцепления равен индексу ADL0 уровня сцепления, и также настройка постоянной времени τ, используемой посредством модуля 28 задержки первого порядка, не меняется. Как результат, нет никаких изменений состояния управления модуля 8 формирования второго индекса уровня сцепления. В нормальном состоянии пробуксовки, где ускорение изменяется мгновенно, модули 7A-7D формирования первого индекса уровня сцепления осуществляют оптимальное управление сцеплением быстро и с точным регулированием.
Напротив, когда возникает такое явление пробуксовки, в котором изменение ускорения от нормального ускорения является небольшим и увеличение скорости является небольшим, модули 7A-7D формирования первого индекса уровня сцепления не осуществляют такое существенное управление, чтобы предотвращать явление пробуксовки, поскольку отклонение DFM скорости и отклонение DFT ускорения являются небольшими. Помимо этого, в случае, когда такое явление пробуксовки продолжается, ускорение S2 становится равным или превышает уровень SSET определения ускорения, тогда как выходной сигнал S4 достигает уровня "L", т.е., например, "0" в модуле 8 формирования второго индекса уровня сцепления, при этом индекс ADL уровня сцепления становится "равным 0" независимо от результатов вычисления модулей 7A-7D формирования первого индекса уровня сцепления. Кроме того, когда ускорение S2 становится равным или превышает уровень SSET определения ускорения вследствие задержки реакции, вызываемой посредством модуля 32 снижения чувствительности к ускорению, ускорение S2 не становится мгновенно равным или меньшим уровня SSET определения ускорения, и это состояние сохраняется некоторое время. При инициировании посредством достижения выходным сигналом S5 уровня "H" модуль 28 задержки первого порядка изменяет постоянную времени τ. Дополнительно, в течение заранее определенного периода времени, который определяется посредством модуля 24 задержки с отключением, команда T* управления крутящим моментом понижается посредством использования постоянной времени, которая изменяется в то время, когда "0" используется в качестве заданного значения. После этого, когда ускорение S2 становится равным или меньшим уровня SSET определения ускорения, команда T* управления крутящим моментом возвращается к команде управления крутящим моментом, соответствующей установившемуся периоду, который основан на индексе ADL0 уровня сцепления.
На фиг.5 показаны рабочие диаграммы модуля 7A вычисления первого индекса уровня сцепления в случае, когда незначительная пробуксовка продолжает возникать. Тогда как горизонтальная ось выражает время, демонстрируются переходы уровней FM1-FM4, FMmin, A1, A2, A3, DFT, DFM, ADL0, соответствующие случаю, когда модуль 8 вычисления второго индекса уровня сцепления не функционирует. Пунктирная линия, соответствующая FM1-FM4, указывает действительную скорость. Что касается уровня FM1-FM4, отклонение от действительной скорости увеличивается вследствие непрерывной незначительной пробуксовки. Указано, что пробуксовка возникает. Кроме того, из этой операции можно отметить, что отклонение DFT ускорения является небольшим, тогда как изменение в индексе ADL0 уровня сцепления от "1" также является небольшим. Таким образом, следует понимать, что такое незначительное управление осуществляется для того, чтобы предотвращать пробуксовку.
На фиг.6 показана рабочая диаграмма уровней FM1-FM4, FMmax, ADL0, S1, S2, ADL, T0* и T* в случае, когда модуль 8 вычисления второго индекса уровня сцепления функционирует. Диаграмма указывает, что относительно уровня FM1-FM4, хотя отклонение от действительной скорости постепенно возрастает со временем вследствие непрерывной незначительной пробуксовки, отклонение понижается снова, и что пробуксовка предотвращается посредством управления, осуществляемого посредством модуля 8 вычисления второго индекса уровня сцепления. Поскольку задержка первого порядка применяется к ускорению S1 посредством фильтра 20 нижних частот, ускорение S2 превышает уровень SSET определения ускорения между временем t2 и временем t5, так что значение ADL становится равным "0". Что касается команды T* управления крутящим моментом, ее значение понижается от приблизительно "1" до "0" в период от времени t2 до времени t3. Темп изменения команды T* управления крутящим моментом определяется посредством задания постоянной времени τ, установленной посредством модуля 28 задержки первого порядка.
Как пояснено выше, согласно варианту осуществления, даже в случае, когда отклонение DFT ускорения и отклонение DFM скорости являются небольшими, и трудно предотвращать пробуксовку с помощью управления, осуществляемого посредством модулей 7A-7D формирования первого индекса уровня сцепления, можно предотвращать пробуксовку посредством использования модуля 8 формирования второго индекса уровня сцепления. Как результат, без необходимости дополнительно использовать новую информацию частоты вращения неведущих валов и т.п. можно распознавать явление пробуксовки только на основе информации частоты вращения ведущих валов, чтобы определять состояние пробуксовки до того, как скорость значительно отличается от действительного значения, и осуществлять управление пробуксовкой надлежащим образом. В частности, согласно настоящему варианту осуществления, можно определять и предотвращать пробуксовку в ходе, например, высокоскоростного движения.
Конфигурации, описанные в примерных вариантах осуществления выше, являются примерами выполнения настоящего изобретения. Можно комбинировать конфигурации с другими общеизвестными технологиями и т.п. Дополнительно, разумеется, можно применять модификации к конфигурациям, описанным выше, без отступления от сути настоящего изобретения.
Дополнительно, области техники, к которым может применяться управление пробуксовкой согласно настоящему изобретению, не ограничены управляющими устройствами для железнодорожных вагонов с электроприводом. Например, можно применять управление пробуксовкой согласно настоящему изобретению к другим связанным областям техники, таким как электромобили.
Как пояснено выше, управляющее устройство для железнодорожного вагона с электроприводом согласно настоящему изобретению полезно для предотвращения пробуксовки/проскальзывания, возникающей в ходе высокоскоростного движения в высокоскоростной железнодорожной сети и т.п.
ПОЯСНЕНИЕ НОМЕРОВ ССЫЛОК
1 - модуль управления пробуксовкой
2 - модуль вычисления крутящего момента
3 - преобразователь электрической мощности
4A-4D - электродвигатель
5A-5D - колесо
6 - рельс
7A-7D - модуль формирования первого индекса уровня сцепления
8 - модуль формирования второго индекса уровня сцепления
9 - модуль вычисления максимального значения
10 - модуль вычисления минимального значения
11, 13, 19 - дифференциатор
12 - модуль вычисления опорной скорости вращения
14, 16 - модуль вычитания
15, 17, 20 - фильтр нижних частот
18 - устройство оценки
21 - компаратор
22, 23 - инвертор
24 - модуль задержки с отключением
25 - процессорный модуль ADL
26, 27 - умножитель
28 - модуль задержки первого порядка
29 - модуль вычисления ускорения
30 - процессорный модуль отклонения ускорения
31 - процессорный модуль отклонения дифференциальной скорости
32 - модуль снижения чувствительности к ускорению
33 - модуль определения пробуксовки
34 - модуль формирования коэффициента усиления
35 - модуль задания постоянной времени
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМ ПОДВИЖНЫМ СОСТАВОМ | 2000 |
|
RU2179515C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВАГОНОМ ЭЛЕКТРОПОЕЗДА | 2007 |
|
RU2434761C1 |
| СПОСОБ ВЫЧИСЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2740353C2 |
| СПОСОБ ОГРАНИЧЕНИЯ НАНЕСЕНИЯ ПЕСКА НА ЖЕЛЕЗНОДОРОЖНЫЕ РЕЛЬСЫ (ВАРИАНТЫ) | 2006 |
|
RU2394710C2 |
| СПОСОБ УПРАВЛЕНИЯ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ, КОНТРОЛЛЕР И ЖЕЛЕЗНОДОРОЖНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2020 |
|
RU2804825C2 |
| СПОСОБ УПРАВЛЕНИЯ И ВОЗМОЖНОГО ВОССТАНОВЛЕНИЯ СЦЕПЛЕНИЯ КОЛЕС УПРАВЛЯЕМОЙ ОСИ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2735967C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ПРОСКАЛЬЗЫВАНИЯ КОЛЕСНЫХ ПАР ПРИ ТОРМОЖЕНИИ ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2021 |
|
RU2770941C1 |
| СПОСОБ И УСТРОЙСТВО ПАРИРОВАНИЯ ЮЗОВАНИЯ КОЛЕСНЫХ ПАР РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2292277C2 |
| Способ управления торможением транспортного средства и устройство для его осуществления | 2022 |
|
RU2819157C1 |
| СИСТЕМА И СПОСОБ МОДЕЛИРОВАНИЯ КОНТАКТА МЕЖДУ КОЛЕСОМ И РЕЛЬСОМ ДЛЯ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ | 2018 |
|
RU2755527C2 |
Группа изобретений относится к вариантам выполнения управляющего устройства для железнодорожных вагонов с электроприводом, в частности, к вариантам выполнения управляющего устройства для железнодорожных вагонов с электроприводом, которое имеет функцию управления пробуксовкой/проскальзыванием, чтобы не допускать свободного проворачивания и проскальзывания колес. Устройство содержит множество электродвигателей (4a-4d) и модуль (1) управления пробуксовкой/проскальзыванием, который формирует значение команды управления крутящим моментом. Модуль управления включает в себя модуль (7A-7D) формирования первого индекса уровня сцепления, модуль (8) формирования второго индекса уровня сцепления, который формирует второй индекс (ADL) уровня сцепления, модуль (27) формирования значения команды управления крутящим моментом, который формирует значение команды управления крутящим моментом в соответствии со вторым индексом (ADL) уровня сцепления и модуль (12) вычисления опорной скорости вращения. Достигается предотвращение пробуксовки/проскальзывания, возникающей в ходе высокоскоростного движения в железнодорожной сети. 3 н. и 5 з.п. ф-лы, 6 ил.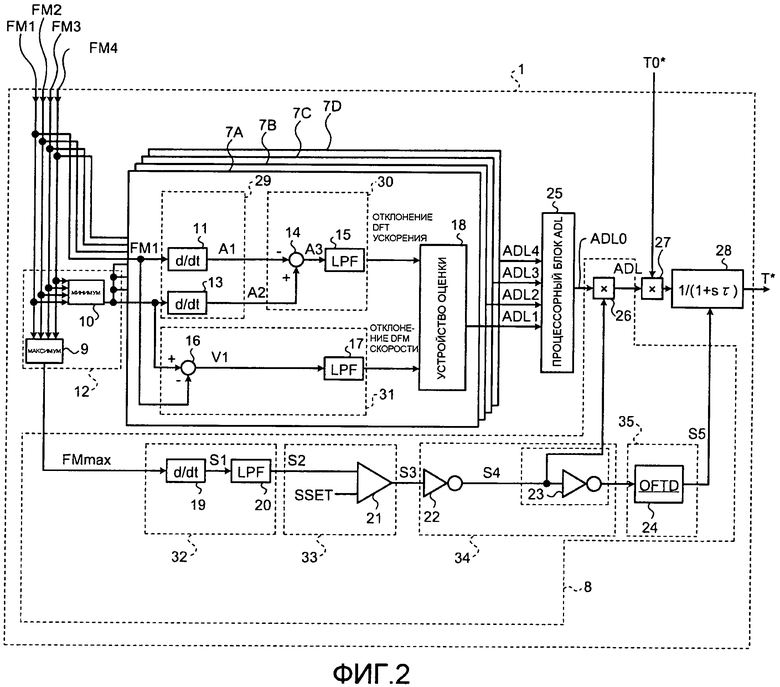
1. Управляющее устройство для железнодорожного вагона с электроприводом, содержащее множество электродвигателей (4a-4d) и модуль (1) управления пробуксовкой/проскальзыванием, который формирует значение команды управления крутящим моментом, чтобы предотвращать пробуксовку или проскальзывание, на основе скоростей (FM1-FM4) вращения множества электродвигателей, в котором: при этом модуль управления пробуксовкой/проскальзыванием включает в себя: модуль (7A-7D) формирования первого индекса уровня сцепления, который формирует первый индекс (ADL0) уровня сцепления, который является индексом, используемым для предотвращения первой пробуксовки или первого проскальзывания, на основе отклонения (DFT) ускорения и отклонения (DFM) скорости, которые были получены посредством использования скоростей вращения; модуль (8) формирования второго индекса уровня сцепления, который формирует второй индекс (ADL) уровня сцепления, который является индексом, используемым для предотвращения второй пробуксовки или второго проскальзывания, имеющих меньшее отклонение (DFT) ускорения и меньшее отклонение (DFM) скорости, чем первая пробуксовка или первое проскальзывание, на основе ускорения (S1-S4), полученного посредством использования скоростей (FM1-FM4) вращения и первого индекса (ADL0) уровня сцепления; и модуль (27) формирования значения команды управления крутящим моментом, который формирует значение команды управления крутящим моментом в соответствии со вторым индексом (ADL) уровня сцепления.
2. Управляющее устройство для железнодорожного вагона с электроприводом, содержащее множество электродвигателей (4a-4d) и модуль (1) управления пробуксовкой/проскальзыванием, который формирует значение команды управления крутящим моментом, чтобы предотвращать пробуксовку или проскальзывание, на основе скоростей (FM1-FM4) вращения множества электродвигателей, в котором: при этом модуль управления пробуксовкой/проскальзыванием включает в себя: модуль (12) вычисления опорной скорости вращения, который вычисляет первую опорную скорость (MIN) вращения и вторую опорную скорость (МАХ) вращения посредством использования скоростей вращения множества электродвигателей; модуль (7A-7D) формирования первого индекса уровня сцепления, который принимает в качестве входного сигнала первую опорную скорость (MIN) вращения и формирует первый индекс (ADL0) уровня сцепления, который является индексом для уровня сцепления между колесами, которые соединены с электродвигателями, и поверхностями, которые придавливаются колесами, на основе отклонения (DFT) ускорения, которое было сформировано на основе ускорения, вычисленного посредством использования скоростей (FM1-FM4) вращения электродвигателей, и на основе отклонения (DFM) скорости, которое было сформировано на основе скоростей вращения электродвигателей; модуль (8) формирования второго индекса уровня сцепления, который принимает, в качестве входного сигнала, вторую опорную скорость (МАХ) вращения и формирует значение (ADL) второго индекса уровня сцепления посредством использования значения (ADL0) первого индекса уровня сцепления и коэффициента усиления (S4), который сформирован на основе ускорения, вычисленного посредством использования второй опорной скорости (МАХ) вращения; и модуль (27) формирования значения команды управления крутящим моментом, который формирует значение команды управления крутящим моментом в соответствии со значением (ADL) второго индекса уровня сцепления.
3. Управляющее устройство для железнодорожного вагона с электроприводом, содержащее множество электродвигателей (4a-4d) и модуль (1) управления пробуксовкой/проскальзыванием, который формирует значение команды управления крутящим моментом, чтобы предотвращать пробуксовку или проскальзывание, на основе скоростей вращения множества электродвигателей, в котором модуль управления пробуксовкой/проскальзыванием включает в себя: модуль (12) вычисления опорной скорости вращения, который вычисляет первую опорную скорость (MIN) вращения и вторую опорную скорость (МАХ) вращения посредством использования скоростей вращения множества электродвигателей; модули (7A-7D) формирования первого индекса уровня сцепления, которые предусмотрены согласно электродвигателям, соответственно, и каждый из модулей (7A-7D) формирования первого индекса уровня сцепления принимает, в качестве входного сигнала, первую опорную скорость (MIN) вращения и скорость (FM1-FM4) вращения соответствующего одного из электродвигателей и формирует первый индекс (ADL0) уровня сцепления, который является индексом для уровня сцепления между колесом, которое соединено с соответствующим электродвигателем, и поверхностью, которая придавливается колесом, на основе отклонения (DFT) ускорения, которое является разностью между ускорением (А1), вычисленным посредством использования скорости (FM1-FM4) вращения соответствующего электродвигателя, и ускорением (А2), вычисленным посредством использования первой опорной скорости (MIN) вращения, и на основе отклонения (DFM) скорости, которое является разностью между скоростью (FM1-FM4) вращения соответствующего электродвигателя и первой опорной скоростью (MIN) вращения; модуль формирования второго индекса уровня сцепления, который принимает, в качестве входного сигнала, вторую опорную скорость вращения и формирует значение (ADL) второго индекса уровня сцепления посредством умножения значения (ADL0) первого индекса уровня сцепления на коэффициент усиления (S4), который сформирован на основе ускорения (S1), вычисленного посредством использования второй опорной скорости (МАХ) вращения; и модуль (27) формирования значения команды управления крутящим моментом, который формирует значение команды управления крутящим моментом в соответствии со значением второго индекса уровня сцепления.
4. Управляющее устройство для железнодорожного вагона с электроприводом по п.3, в котором: модуль (25) управления пробуксовкой/проскальзыванием дополнительно включает в себя процессорный блок индекса уровня сцепления, который вычисляет один индекс (ADL1-ADL4) уровня сцепления посредством использования множества первых индексов уровня сцепления, сформированных посредством множества модулей (7A-7D) формирования индекса уровня сцепления, соответственно, и который выводит один индекс (ADL0) уровня сцепления в модуль (8) формирования второго индекса уровня сцепления в качестве первого индекса (ADL0) уровня сцепления, и крутящие моменты множества электродвигателей совместно управляются на основе значения второго значения (ADL) индекса уровня сцепления, которое сформировано посредством модуля (8) формирования второго индекса уровня сцепления посредством умножения одного индекса (ADL0) уровня сцепления на коэффициент усиления (S4).
5. Управляющее устройство для железнодорожного вагона с электроприводом по п.3 или 4, в котором: каждый из модулей (7A-7D) формирования первого индекса уровня сцепления включает в себя первый модуль (29) вычисления ускорения, который вычисляет ускорение (А1) посредством использования скорости вращения соответствующего электродвигателя, а также вычисляет ускорение (А2) посредством использования первой опорной скорости (MIN) вращения, модуль (8) формирования второго индекса уровня сцепления включает в себя второй модуль (32) вычисления ускорения, который вычисляет ускорение (S1) посредством использования второй опорной скорости (МАХ) вращения, и скорость реагирования на ускорение (S1), вычисленная посредством второго модуля (32) вычисления ускорения, сконфигурирована так, чтобы быть ниже скорости реагирования на ускорение, вычисленной посредством первого модуля (29) вычисления ускорения.
6. Управляющее устройство для железнодорожного вагона с электроприводом по п.3 или 4, в котором модуль формирования второго индекса уровня сцепления изменяет значение коэффициента усиления (S4) в зависимости от того, превышает или нет ускорение (S1, S2), вычисленное посредством использования второй опорной скорости (МАХ) вращения, заранее определенное значение (SSET) и, в случае, когда ускорение (S1, S2) превышает заранее определенное значение, коэффициент усиления (S4) задается равным меньшему значению.
7. Управляющее устройство для железнодорожного вагона с электроприводом по п.3 или 4, в котором в модуле формирования второго индекса уровня сцепления значение коэффициента усиления (S4) изменяется при использовании первого заранее определенного значения и второго заранее определенного значения, которое меньше первого заранее определенного значения, в качестве точек изменения значения коэффициента усиления относительно ускорения, вычисленного посредством использования второй опорной скорости (МАХ) вращения, так что значение коэффициента усиления становится большим в соответствии со следующими тремя диапазонами в установленном порядке: диапазон, в котором ускорение, вычисленное посредством использования второй опорной скорости вращения, равно или превышает первое заранее определенное значение; диапазон, в котором ускорение, вычисленное посредством использования второй опорной скорости вращения, равно или превышает второе заранее определенное значение, но меньше первого заранее определенного значения; диапазон, в котором ускорение, вычисленное посредством использования второй опорной скорости вращения, меньше второго заранее определенного значения.
8. Управляющее устройство для железнодорожного вагона с электроприводом по п.3 или 4, в котором: модуль формирования значений команды управления крутящим моментом включает в себя модуль (28) задержки первого порядка, который выводит значение команды управления крутящим моментом, сформированное на основе значения (ADL) второго индекса уровня сцепления, после применения к нему задержки первого порядка, и модуль (8) формирования второго индекса уровня сцепления включает в себя модуль (24) задержки с отключением, который задает постоянную времени, используемую посредством модуля (28) задержки первого порядка согласно значению коэффициента усиления (S4).
| WO 2005110802 A1, 24.11.2005 | |||
| JP 2003348706 A, 05.12.2003 | |||
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР И ПОДАВЛЕНИЯ ФРИКЦИОННЫХ АВТОКОЛЕБАНИЙ В КИНЕМАТИЧЕСКОЙ ЦЕПИ ПОДВИЖНОГО СОСТАВА С АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ | 2004 |
|
RU2270766C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМ ПОДВИЖНЫМ СОСТАВОМ | 2000 |
|
RU2179515C2 |

