Область техники, к которой относится изобретение
Изобретение относится к устройству и способу управления средствами защиты людей при дорожно-транспортном происшествии, охарактеризованным в независимых пунктах формулы изобретения.
Уровень техники
Из публикации DE 102004042467 A1 уже известны способ и устройство для генерирования сигнала управления срабатыванием устройства защиты пешеходов. В этом случае осуществляются проверка необходимости срабатывания и проверка достоверности информации датчика, причем при проверке необходимости срабатывания для распознавания объекта как пешехода по информации от датчика выполняются выделение признаков сигнала и/или обнаружение смещения (в сторону), определяющее точку столкновения с объектом, причем сигнал на приведение в действие устройства защиты пешехода вырабатывается в случае, если при проверке необходимости срабатывания распознано столкновение с пешеходом, а проверка достоверности информации от датчика дала положительный результат.
Раскрытие изобретения
Предлагаемые в изобретении устройство и способ управления средствами защиты людей при дорожно-транспортном происшествии, охарактеризованные в независимых пунктах формулы изобретения, имеют по сравнению с известным решением то преимущество, что определение частоты сигнала, производного из аварийного сигнала, т.е. полученного на его основе, позволяет очень точно и надежно отличить наезд на пешехода от наезда на другие объекты. Это объясняется тем, что разные объекты имеют различную жесткость и поэтому возбуждают колебания на различной частоте. В соответствии с изобретением эту частоту определяют через длительность характеристики сигнала, причем также используется просуммированная, т.е. проинтегрированная, характеристика сигнала. Этим в случае использования изобретения в системе защиты пешеходов обеспечивается более эффективная защита пешеходов.
В данном случае вторым сигналом может быть первый сигнал, отфильтрованный первый сигнал, усредненный первый сигнал или же проинтегрированный или просуммированный первый сигнал.
Если предлагаемые в изобретении способ или устройство используются для управления срабатыванием средствами защиты при других видах столкновений, например при столкновении автомобилей, то изобретение позволяет лучше проводить различие между случаем срабатывания и случаем несрабатывания средств защиты. В частности, предлагаемый в изобретении анализ частоты позволяет лучше идентифицировать так называемые относительно некритичные объекты (англ.: "misuse objects"), такие как мелкие животные, столбики. Тем самым достигаются повышенный уровень защиты и снижение опасности случайного ошибочного срабатывания системы.
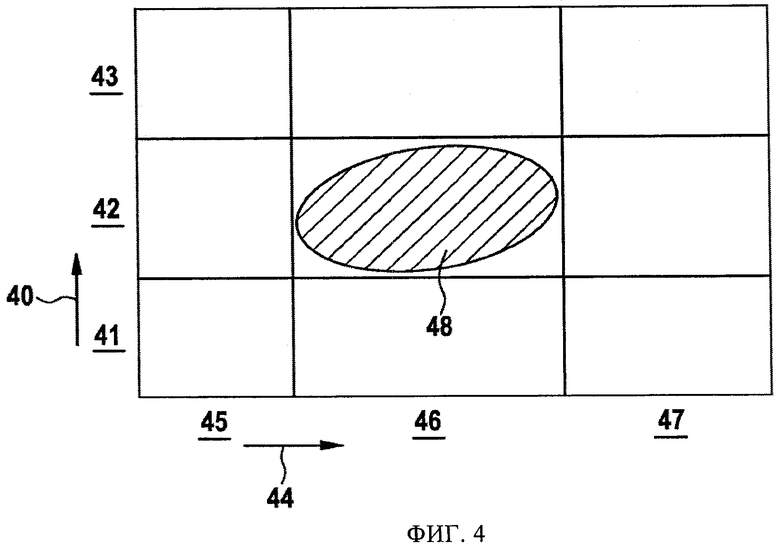
Что касается защиты пешеходов, необходимо учитывать, что люди отличаются от многих объектов, при наезде на которые нежелательно срабатывание средств защиты пешеходов, в частности, своей массой и твердостью, т.е. жесткостью. Это поясняется на фиг.4. По оси абсцисс нанесен вес, а по оси ординат - жесткость. При этом в каждом случае определяют три класса, причем по весу делают различие между легким 45, средним 46 и тяжелым 47. Жесткость различают как мягкую 41, среднюю 42 и твердую 43. Показатели для людей колеблются в области 48, а именно от шестилетнего ребенка до взрослого. Например, в нижнем левом поле можно предположить наезд на мяч, выше - на кошку, птицу, столбик, а в самом верхнем поле - на мячик для гольфа. Для среднего веса выше выделенного для людей поля можно предположить наезд на большой стальной столб или контейнер для мусора. Для тяжелого веса при твердой жесткости можно предположить удар в стену или в другой автомобиль. Если тогда по частоте колебания, возникающего при столкновении, классифицировать жесткость объекта наезда, то можно определить этот объект. Частоту преимущественно регистрируют датчиком ускорения, или несколькими датчиками ускорения, или датчиками стука. При этом частота собственных колебаний на простой упругой модели пропорциональна корню квадратному из модуля упругости. Таким образом, твердые объекты при наезде дают высокочастотные сигналы, тогда как мягкие объекты - низкочастотные сигналы.
Столкновения, требующие срабатывания средств защиты, зачастую отличаются от столкновений, не требующих срабатывания средств защиты, и от столкновений с некритичными объектами частотной характеристикой сигналов ускорения. Частотная характеристика сигналов ускорения определяется последовательностью процессов разрушения в зоне деформации. Столкновения, не требующие срабатывания средств защиты, из-за низкой скорости столкновения, а значит, и медленно протекающих процессов разрушения, как правило, дают сигналы ускорения более низкой частоты, чем столкновения, требующие срабатывания средств защиты. Некритичные объекты также часто имеют частотные характеристики, заметно отличающиеся от сигналов опасного столкновения. Они, с одной стороны, могут иметь более низкую частоту, например куча гравия, но, с другой стороны - и более высокую частоту, например удары молотка, чем сигналы столкновения. Цель состоит в том, чтобы обнаружить в сигнале ускорения эти различия частот. При лобовых столкновениях наиболее пригоден для этого датчик ускорения, который регистрирует ускорение в продольном направлении автомобиля, например в установленном по центру устройстве управления подушками безопасности. Вместе с тем, можно анализировать также частоты от датчика поперечного ускорения или так называемых фронтальных датчиков. Фронтальные датчики установлены в передней части автомобиля. Тогда полученную таким образом информацию о частоте можно использовать, чтобы в дальнейшем вмешиваться в главный алгоритм, работающий на основе сигналов ускорения и их первого и второго интегралов, путем коррекции порогов срабатывания. Вмешательство в главный алгоритм может быть в принципе таким же, как и воздействие прочих дополнительных алгоритмов, например алгоритма обработки сигналов фронтальных датчиков на главный алгоритм.
Для бокового столкновения анализ частоты лучше всего осуществлять на основе периферийных датчиков поперечного (бокового) ускорения. Периферийные датчики поперечного ускорения встроены в боковую часть автомобиля. Полученную таким путем информацию можно использовать для того, чтобы вмешиваться в главный алгоритм путем коррекции порогов срабатывания. Для этого в основном используется предлагаемый в изобретении метод определения частоты.
Описанный способ заключается в выполнении анализа частоты на основе измерения длительности сигнала, а также проинтегрированного сигнала, причем методом обработки сигналов можно изменять и сам сигнал.
Признаки зависимых пунктов формулы изобретения характеризуют частные предпочтительные варианты выполнения устройства и осуществления способа управления средствами защиты людей при дорожно-транспортном происшествии.
Длительность характеристики сигнала особенно предпочтительно определять с использованием разности следующих друг за другом значений сигнала и просуммированного сигнала. Для определения длительности сигнала эти разности можно подвергать абсолютному суммированию. Длительность сигнала, или его характеристики, является в сигнале мерой движения. Соответственно длительность, например, первого интеграла, является мерой движения в интеграле. Высокочастотные колебания отличаются тем, что они сравнительно слабо наращивают интеграл, т.е. при данном движении движение в интеграле сравнительно мало. Поэтому сигнал сравнивают с просуммированным или проинтегрированным сигналом. Соответственно, под суммированием понимают возможность интегрирования средствами вычислительной техники. Поэтому целесообразно использовать отношение длительностей. Тем самым улучшается оценка частоты.
Предпочтительно для этого берут частное длительности сигнала и длительности просуммированного сигнала. При этом промежуток между значениями сигнала для формирования разностей определяется путем выполнения алгоритма в тактовом режиме. Причем это происходит независимо от того, начинается ли колебание с положительной или отрицательной полуволны. Знак (плюс или минус) не учитывается.
При этом определение частоты может осуществляться непрерывно, т.е. с запуском алгоритма, или может начинаться заново через определенные промежутки.
Если используют больше одного датчика аварии, например больше одного датчика ускорения, или датчика корпусного шума, или датчика стука, то схема обработки сигналов, обычно микроконтроллер, взвешивает частоты, определенные для отдельных датчиков аварии и затем усредняет эти взвешенные значения.
Взвешивание предпочтительно осуществляется в зависимости от длительности просуммированного второго сигнала. При этом взвешивание выполняют в соответствии с длительностью первого интеграла сигнала или просуммированного сигнала. Это означает, что датчику с наибольшей длительностью первого интеграла присваивают наибольший весовой коэффициент. Тем самым обеспечивается, что ближайший к месту удара при наезде на пешехода датчик, который обычно регистрирует наиболее сильный сигнал, вносит вклад при оценке частоты в большей мере, чем другие датчики.
Как указывалось выше, датчики аварии могут быть выполнены в виде датчиков ускорений, причем одновременно могут дополнительно использоваться и другие датчики. Наряду с датчиками ускорения можно использовать также датчики частоты вращения, датчики стука или датчики корпусного шума.
Краткое описание чертежей
Примеры осуществления изобретения более подробно поясняются ниже в описании со ссылкой на прилагаемые чертежи, на которых показано:
на фиг.1 - блок-схема предлагаемого в изобретении устройства,
на фиг.2а и 2б - схема прохождения сигналов, поясняющая предлагаемый в изобретении способ,
на фиг.3 - схема прохождения сигналов,
на фиг.4 - диаграмма "жесткость-вес",
на фиг.5 - характеристика сигнала для синусоидального ускорения с круговыми частотами 600 и 300 Гц,
на фиг.6 - соответствующая диаграмма для интеграла этого синусоидального ускорения,
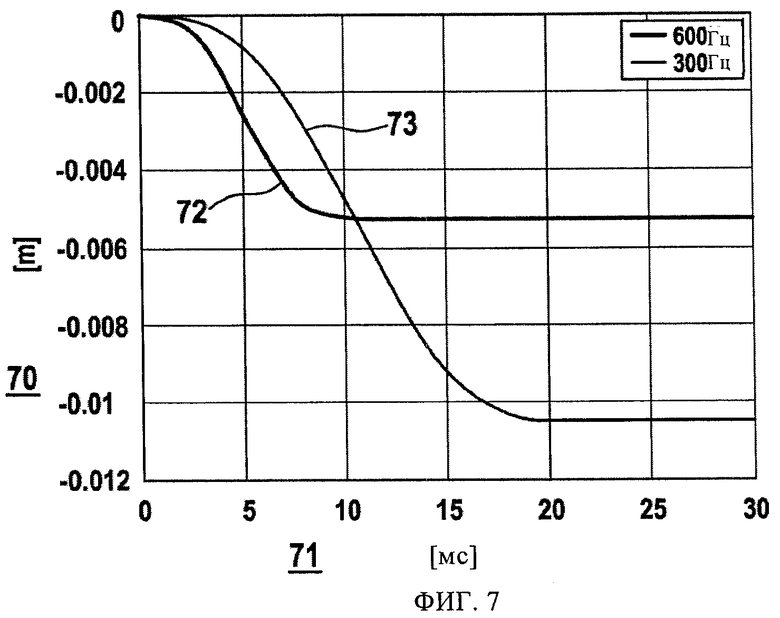
на фиг.7 - соответствующий второй интеграл для этого синусоидального ускорения,
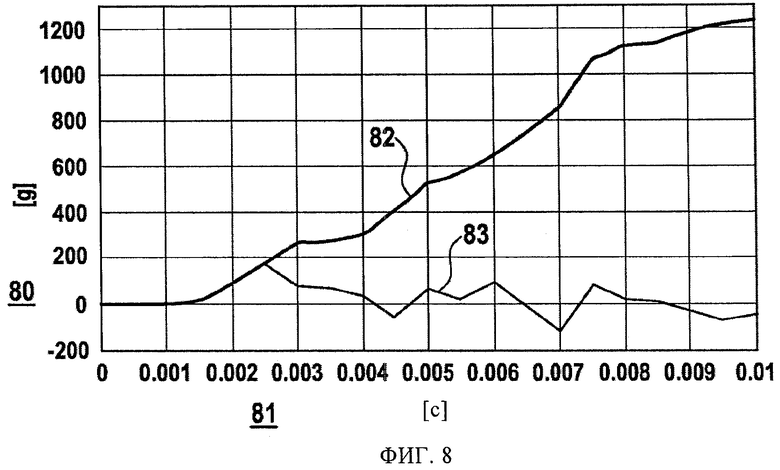
на фиг.8 - сигнал ускорения и соответствующая длительность сигнала ускорения,
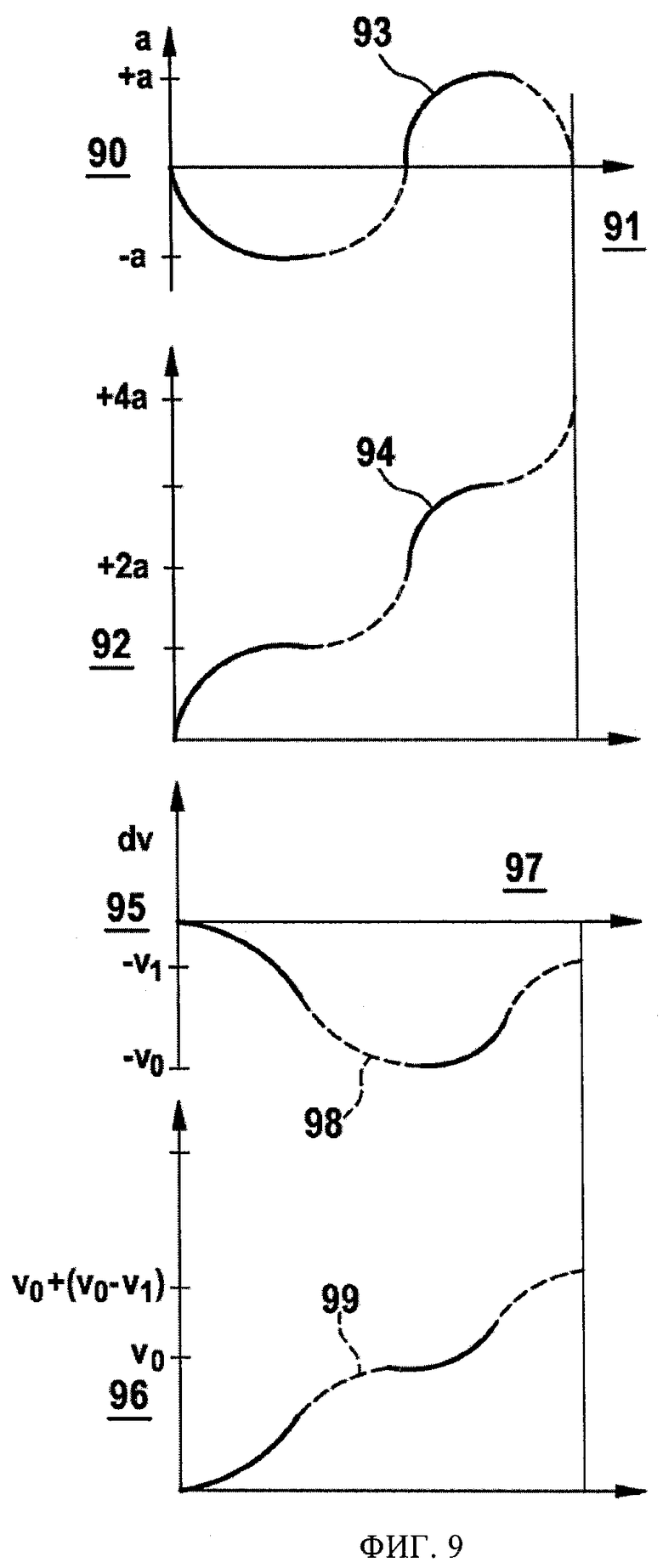
на фиг.9 - схематическое изображение колебания, вторая полуволна которого имеет более высокую частоту, чем первая полуволна,
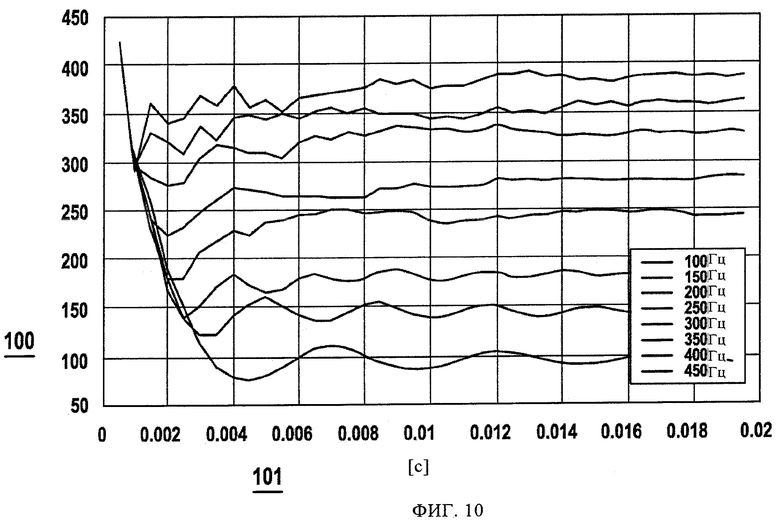
на фиг.10 - результат оценки частот для синусоидальных кривых с различными частотами,
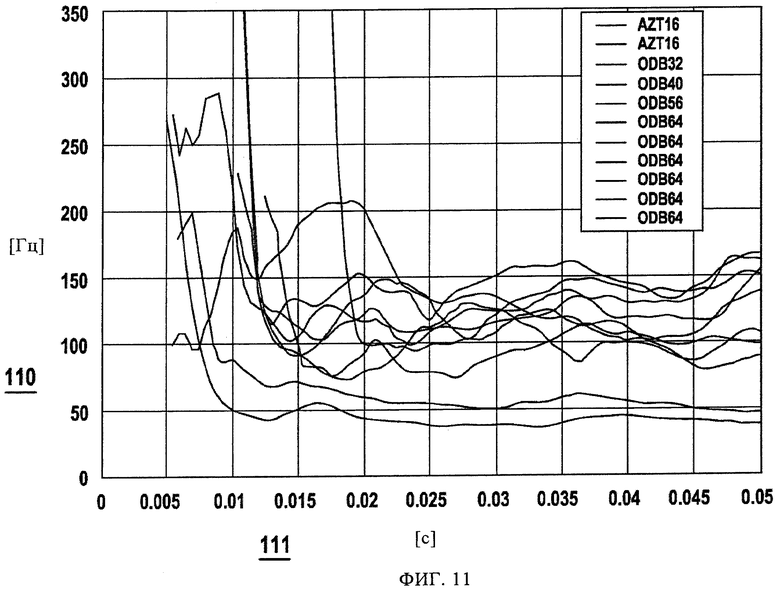
на фиг.11 - результат оценки частоты для различных столкновений автомобиля,
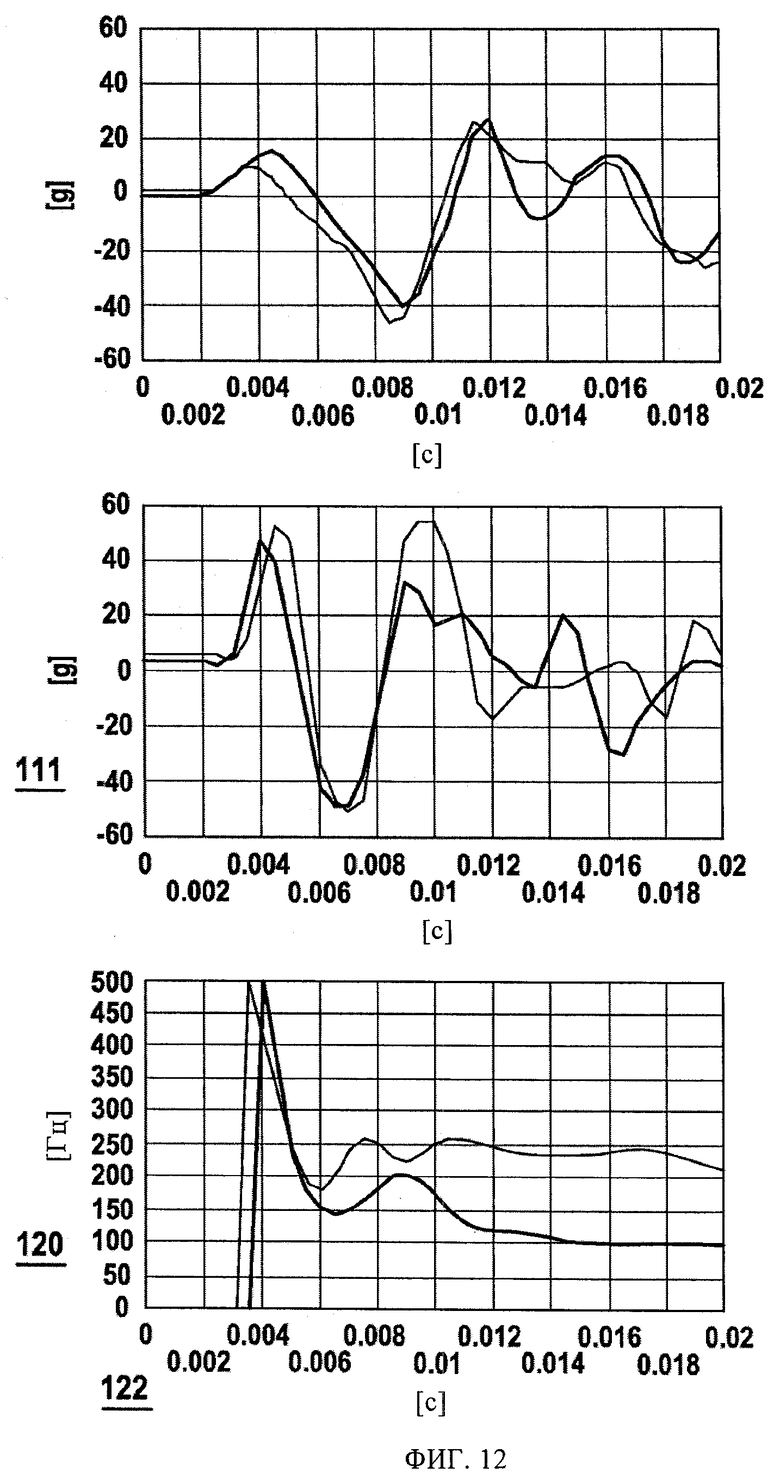
на фиг.12 - сигналы ускорения при наезде пешехода с ударом в его голень, наезде на стальной столбик сравнимой массы, а также скорости автомобиля или анализ частоты в соответствии с предлагаемым в изобретении способом.
Осуществление изобретения
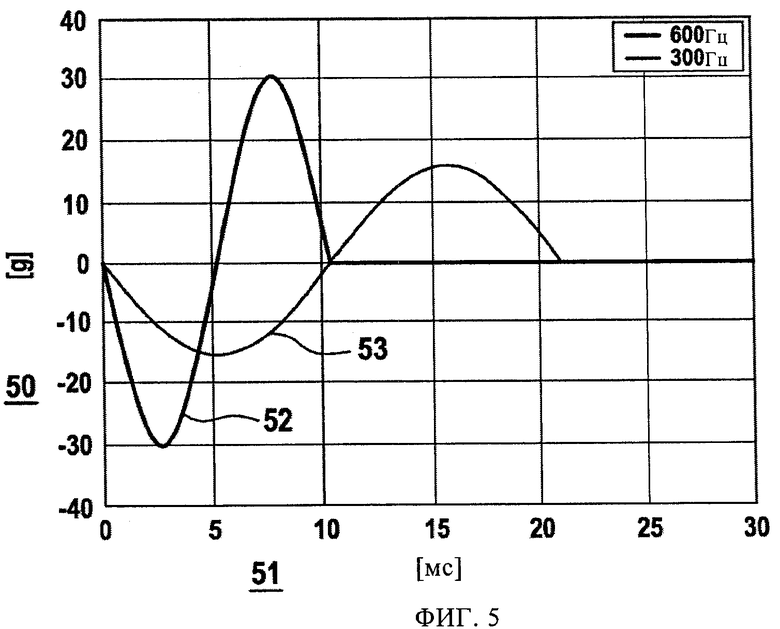
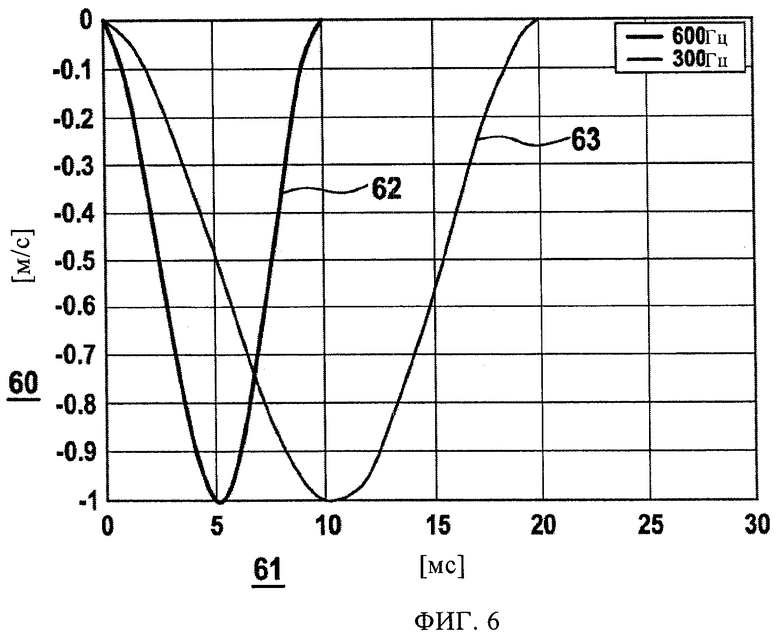
Для идентификации объектов столкновения анализ частоты дает большое преимущество как с точки зрения защиты пешеходов, так при других видах столкновений. При этом можно определять частоту по минимумам сигнала ускорения и первого интеграла или также второго интеграла. Это следует, например, из фиг.5. На фиг.5 по оси абсцисс 51 нанесено время, а по оси ординат 50 - ускорение. Два сигнала 52 и 53 представлены в зависимости от времени. Сигнал 52 имеет круговую частоту 600 Гц, сигнал 53 - круговую частоту 300 Гц. На фиг.6 показаны соответствующие интегралы. При этом сигнал 63 представляет собой сигнал с круговой частотой 600 Гц, а сигнал 63 - сигнал с круговой частотой 300 Гц. В соответствии с фиг.7 сигнал 72 - это сигнал с круговой частотой 600 Гц, а сигнал 73 - сигнал с круговой частотой 300 Гц. Таким образом, частоту можно воспроизвести двумя методами:
1. Частоту можно вычислить на основе минимума ускорения и минимума первого интеграла ускорения. Тогда частоту получаем путем деления

2. Частоту можно вычислить на основе минимума первого интеграла и минимума второго интеграла. Здесь также можно воспользоваться делением

Этот способ может быть усовершенствован в отношении следующих моментов:
А. Если сигнал не заканчивается после определенного периода, как описано выше, а колебание сохраняется и дольше, ускорения и первый интеграл не достигают новых максимумов. Следовательно, первый метод расчета по-прежнему дает правильную оценку частоты. Второй же интеграл непрерывно убывает и достигает новых минимальных значений - поэтому второй метод расчета уже неприменим, и оцениваемые частоты становятся все более низкими.
Б. Регистрируют только первую полуволну, или первый полный период. Дальнейшее изменение реального, как правило, негармонического, сигнала регистрируют только в том случае, если в сигнале либо первом и втором интеграле имеются новые минимумы. Если это не так, оценка частоты уже не меняется, даже если сам сигнал изменяет свою частоту. Такой пример виден на фиг.8. На этом чертеже показана диаграмма, на которой по оси абсцисс 81 нанесено время, а по оси ординат 80 - ускорение. Сигнал 83 характеризует ускорение. Сигнал 82 характеризует длительность сигнала ускорения. Проведение различия в отношении того, необходимо ли выполнять вычисления с помощью минимумов или максимумов, также не может отобразить, например, непрерывного перехода между участками бампера с отрицательным ускорением и положительным ускорением.
Поэтому в изобретении предлагается рассматривать не минимумы сигнала первого и/или второго интеграла, а длительность сигнала, или длительность характеристики сигнала. При этом можно предпочтительным образом выполнять абсолютное суммирование разностей следующих друг за другом значений.
Это показано на фиг.8 кривой 82. Длительность сигнала первого интеграла и второго интеграла выражаются следующим образом:



Изобретение поясняется ниже на примере сигналов ускорения. Вместе с тем, можно использовать и другие сигналы аварии.
В уравнении (3б) использовано то обстоятельство, что разность двух следующих друг за другом значений интегратора представляет собой значение ускорения, соответствующее именно этому циклу. Соответственно, для уравнения (3в) справедливо, что разность двух следующих друг за другом значений второго интеграла является именно значением первого интеграла в этом цикле.
На фиг.8 представлена длительность сигнала ускорения. Видно, что до первого максимума сигнала длительность сигнала следует самому сигналу. Последующее же падение уровня сигнала учитывается в длительности без знака и ведет к дальнейшему нарастанию длительности. Следовательно, длительность сигнала является мерой "движения в сигнале". Соответственно длительность первого интеграла является мерой "движения в первом интеграле", и высокочастотные колебания можно отличить теперь по тому, что они наращивают интеграл сравнительно слабо, т.е. данное "движение в сигнале" ведет к сравнительно малому "движению в интеграле".
Поэтому вместо отношения амплитуд (1) можно использовать отношение длительностей. Таким путем в качестве улучшенной оценки частоты получают

При этом индекс i проходит через все циклы вычисления, начиная с запуска алгоритма. Частота здесь выражена как частное от деления длительности сигнала ускорения на абсолютный интеграл сигнала ускорения.
Несложно заметить, что формула (4) не зависит от того, начинается ли колебание с положительной или отрицательной полуволны (знак перед a).
Также несложно понять, что во время первой полуволны приведенного выше синусоидального колебания 0<t<π/ω справедливы именно уравнения
 и
и 
и, следовательно, воспроизводится результат из формулы (1). При этом горизонтальный штрих указывает на достигнутый минимум соответственно a и ν.
Если вторая полуволна π/ω<t<2π/ω уже не вносит вклада в выражение (1), поскольку во время первой полуволны были достигнуты минимумы сигнала и интеграла и во второй полуволне происходит только обратное интегрирование до ν=0, то вторая полуволна вполне влияет на результат вычисления по выражению (4). Если колебание остается гармоническим, то в конце всего периода справедливы уравнения
 и
и  ,
,
т.е. отношение, а значит, и определенная частота не изменяются. Но если колебание во второй полуволне изменит свою частоту, это будет зафиксировано методом (4), в отличие от метода (1), что дает соответственно исправленную оценку частоты. Это иллюстрируется на фиг.9. В данном примере вторая полуволна сигнала имеет ту же амплитуду, что и первая полуволна, но более высокую частоту. Однако это не входит в длительность сигнала, и в конце периода справедливо выражение: длительность(a)=4a 0. Но более высокая частота второй полуволны ведет к тому, что интегратор не возвращается на ноль, а останавливается на отрицательном значении -ν1. Таким образом, вторая полуволна имеет следствием изменение интегратора ν0-ν1. Поэтому длительность интеграла (ν)=2ν0-ν1<2ν0, а значит, меньше, чем при гармоническом продолжении колебания. Следовательно, частное (4) дает более высокую оценку частоты, чем частное (1).
На фиг.10 представлен результат оценки (4) частоты для гармонических колебаний с частотами 100-450 Гц. Причина возникающих здесь определенных отклонений от точных частот лежит в обработке сигнала; в этом примере датчик опрашивается с частотой 4,4 кГц, алгоритм анализа работает асинхронно с опросом датчика по растру с частотой 2 кГц. При соответственно высокочастотных и синхронных считываний и обработке сигналов уравнение (4) воспроизводило бы точные частоты.
На фиг.11 для данной платформы транспортного средства представлен анализ частот при столкновениях автомобилей конкурирующих типов AZT (технический центр компании "Альянс") на скорости 16 км/ч (столкновение с восстанавливаемыми повреждениями, не требующее срабатывания средств защиты) по сравнению со столкновениями с 40%-ным смещением в сторону или перекрытием при наезде на деформируемые препятствия (сокр. ODB от англ. Offset Deformable Barrier) на скорости 32, 40 и 64 км/ч на основе x-датчика центрального устройства. Разделение различных типов столкновений по их частотному составу приведено.
Тем же методом можно заменить формулу (2) следующей формулой:

Таким образом частота определяется как частное абсолютного интеграла сигнала ускорения и абсолютного интеграла первого интеграла.
В отличие от формулы (2) эта оценка частоты дает также правильные результаты и в том случае, если колебание не изменяется после одного периода, а продолжает сохраняться. Тогда второй интеграл и его длительность хотя и возрастают, но это компенсируется именно дальнейшим увеличением длительности первого интеграла в числителе, и отношение, а значит, и частота остаются постоянными.
Оба метода (4) и (5) представляют собой отношение двух величин. Теперь в коде устройства управления можно заложить считывание показаний на предмет соотношения с пороговым значением, например:

в форме

Это позволяет обойтись без деления, требующего большого объема вычислительных операций.
Для применения системы в области защиты пешеходов обычно используют два или три датчика ускорений. Здесь возникает проблема, как скомбинировать друг с другом частоты сигналов от отдельных датчиков с учетом уровней этих сигналов. При этом следует по возможности избегать деления для отдельных частот в формулах (4) и (5).
Эти требования выполняются следующим образом. Оценка (4) частоты, в этом примере применительно к трем независимым датчикам (левому, среднему, правому) сначала дает три независимых частоты
 ,
,  и
и 
Теперь можно выполнить взвешенное усреднение этих трех отдельных частот таким образом, чтобы сигналы отдельных датчиков взвешивались по длительности первого интеграла. Это означает, что датчику с наибольшей длительностью первого интеграла придается наибольший вес. Тем самым показания ближайшего к месту соударения датчика, который при наезде на пешехода обычно выдает наиболее сильный сигнал, учитываются в оценке частоты в соответственно большей мере, чем информация от других датчиков. При использовании весовых коэффициентов
 , где индексы i и j обозначают отдельные датчики, в качестве суммарной частоты получаем
, где индексы i и j обозначают отдельные датчики, в качестве суммарной частоты получаем

Таким образом, в числителе суммируется длительность сигналов ускорения по всем датчикам, а в знаменателе - длительность первых интегралов (которые согласно выражению (3б) идентичны абсолютному интегралу ускорения) по всем датчикам. Поскольку выражение (7) опять же представляет собой простое частное, в этом случае также можно представить в форме (6) считывание показаний на предмет соотношения с пороговым значением, избегая таким образом деления.
Аналогичным образом, оценка (5) частоты для трех отдельных датчиков дает следующие результаты:
 и
и
Взвешенное усреднение производится здесь предпочтительно таким образом, чтобы отдельные датчики взвешивались в соответствии с длительностью их второго интеграла. При использовании весовых множителей  в качестве общей частоты получаем
в качестве общей частоты получаем
Этот результат также позволяет представить считывание показаний на предмет соотношения с пороговым значением в форме (6).
На фиг.12 представлены сигналы от соударения с ногой пешехода (удар в голень, 13,4 кг) и со стальным столбиком сравнимой массы (12,2 кг) бампера автомобиля при скорости автомобиля 20 км/ч. Комбинированный анализ частот от обоих датчиков на основе формулы (8) позволяет в этом случае надежно различить эти объекты, начиная с 10-й миллисекунды.
При использовании системы для защиты пешеходов считывание показаний на предмет соотношения с пороговым значением, базирующееся на формулах (4), (5), (7) или (8), наиболее уместно выполнять, используя пороговое значение, которое можно выбирать в зависимости от скорости, полученной по сети CAN и/или обнаруженного места столкновения, и/или фактической температуры окружающей среды.
Сравнение формы (6) может осуществляться в определенном временнóм окне с постоянным или зависящим от времени порогом.
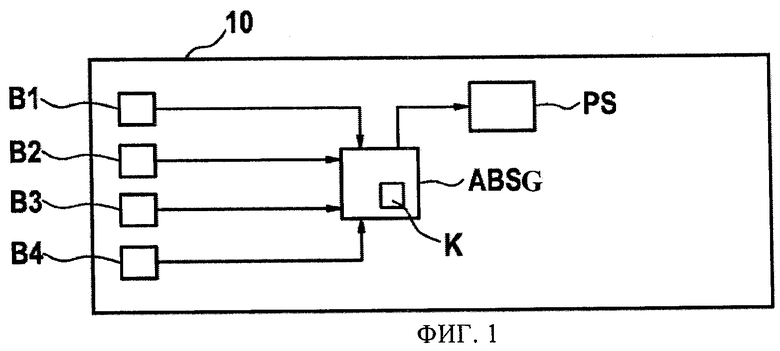
На фиг.1 показана блок-схема предлагаемого в изобретении устройства. В передней части транспортного средства 10, в данном случае автомобиля, установлены, например, четыре датчика B1-B4 ускорений. Вместо четырех датчиков ускорения можно использовать также только три, или два, или даже один. Датчики B1-B4 ускорений на основании ускорения генерируют с помощью микромеханического элемента, например, изменение электрической емкости, которое усиливается и преобразуется в цифровую форму, чтобы передать его на устройство управления подушками безопасности (ABSG). Это устройство управления ABSG расположено в середине автомобиля, но может располагаться и в других местах. Устройство ABSG управляет всеми средствами защиты людей при дорожно-транспортном происшествии, т.е. средствами защиты пешеходов и средствами защиты пассажиров. Внутренняя структура устройства управления ABSG для простоты на чертеже не показана. Показано только, что в состав устройства управления подушками безопасности может входить датчик К корпусного шума. В устройство ABSG управления включены схема обработки сигналов, например микроконтроллер, а также интерфейсные модули и другие датчики схемы управления для взаимодействия со средствами PS защиты людей при дорожно-транспортном происшествии.
В зависимости от сигналов с датчиков B1-B4 ускорений устройство управления подушками безопасности выполняет описанный выше анализ частоты. По его результатам можно идентифицировать объект столкновения, чтобы принять решение о необходимости приведения в действия средств PS защиты людей или отсутствии таковой. Средства PS защиты включают в себя внутренние подушки безопасности, натяжители ремней безопасности, а также средства защиты пешеходов, например приподнимающийся передний капот и/или наружные подушки безопасности.
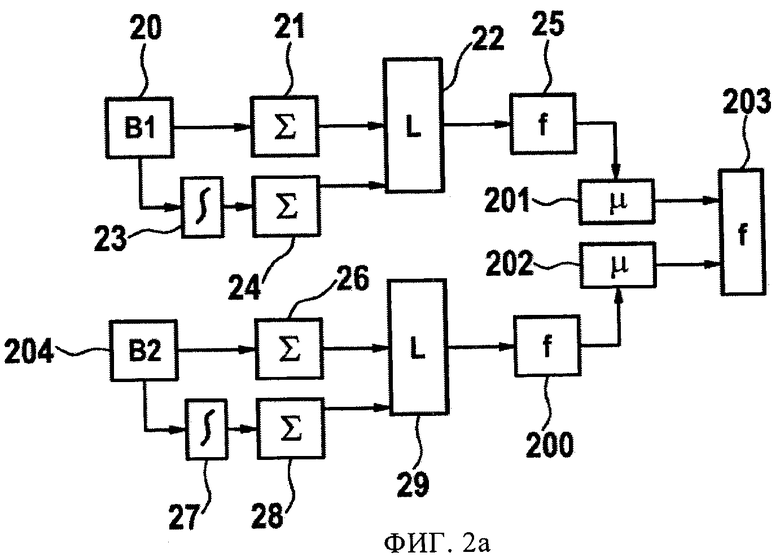
Фиг.2а поясняет сущность предлагаемого в изобретении способа на первой схеме прохождения сигналов. Однако здесь в качестве примера рассматриваются только два датчика B1 и B2 ускорений. Датчики B1 и B2 ускорений выдают свои сигналы в блоках 20 и 204. Затем в блоке 21 сигнал от датчика B1 ускорения подвергается абсолютному сложению в отношении следующих друг за другом значений сигнала и их разностей. Параллельно с этим в блоке 23 выполняется интегрирование сигнала ускорения от датчика B1, т.е. могут выполняться взвешенное усреднение или другие эквивалентные виды интегрирования. И в этом случае в блоке 24 осуществляется абсолютное сложение разностей следующих друг за другом значений. Затем в блоке 22 формируют частное этих длительностей сигналов, чтобы в блоке 25 определить частоту. По значениям первого интеграла в блоке 201 можно определить весовой коэффициент для частоты из блока 24, как описано выше. Вместе с тем, можно производить также другие взвешивания, жестко установленные заранее или выполняемые адаптивно. Эта взвешенная частота поступает в блок 203, формирующий среднее значение. Результатом является искомая частота.
В нижней половине пути прохождения сигнала этот процесс точно так же параллельно происходит для сигнала от датчика B2. Следующие друг за другом значения вычитаются одно из другого, и разности значений подвергают абсолютному суммированию в блоке 26. Сигнал датчика ускорения B2 проходит интегрирование в блоке 27, а затем и здесь в блоке 28 выполняется суммирование разностей следующих друг за другом значений. На основе полученных значений в блоке 29 формируется частное, чтобы на его основании в блоке 200 определить частоту. Аналогично в блоке 29 выполняется, в качестве примера, взвешивание по значениям первого интеграла, как это описано выше, чтобы выдать результат в блоке 202. Здесь также возможно любое иное взвешивание, чтобы соответственно усилить или ослабить сигналы от отдельных датчиков при их усреднении для определения частоты. Взвешивание частот дает взвешенную частоту, которая также участвует в формировании 203 среднего значения. Затем отсюда определяют взвешенное среднее значение. Если имеется только один датчик, то осуществление предлагаемого в изобретении способа заканчивается, например, в блоке 25. В этом случае взвешивание и формирование среднего значения не требуются. Если имеется соответственно больше сигналов, то пути прохождения этих сигналов повторяются.
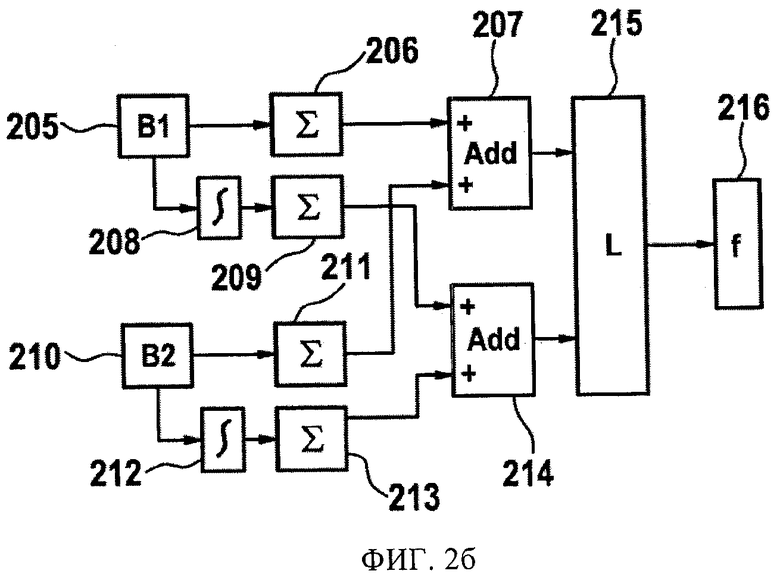
Фиг.2б поясняет альтернативный вариант прохождения сигналов. В блоке 205 осуществляется формирование сигнала ускорения датчиком B1. Этот сигнал уже может быть подвергнут, например, низкочастотной фильтрации. В блоке 206 выполняется абсолютное суммирование этого сигнала в отношении его следующих друг за другом значений и их разностей. Параллельно с этим в блоке 208 выполняется интегрирование сигнала, а затем в блоке 209 - абсолютное суммирование в отношении следующих друг за другом значений и их разностей. В блоке 207 осуществляется сложение сумм ускорений, подвергнутых описанному выше абсолютному суммированию, а в блоке 214 - сложение сумм проинтегрированных ускорений, подвергнутых абсолютному суммированию. Это в соответствии с уравнением (7) позволяет сформировать частное этих двух сумм в блоке 215, чтобы по нему в блоке 216 определить частоту. Таким образом, формирование отдельных частных и усреднение больше не требуются.
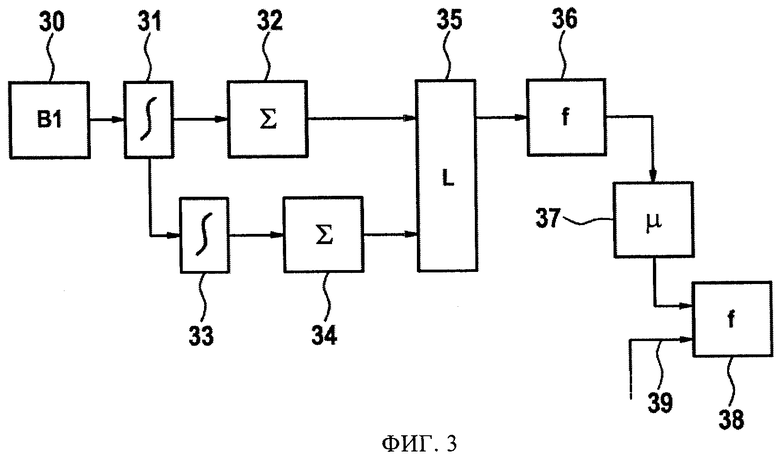
Фиг.3 поясняет альтернативный вариант осуществления предлагаемого в изобретении способа. В блок 30 поступает сигнал датчика B1 ускорения. Этот сигнал в блоке 31 подвергается интегрированию. Затем в блоке 32 выполняется абсолютное суммирование разностей следующих друг за другом значений, причем параллельно с этим в блоке 33 проинтегрированный сигнал ускорения еще раз интегрируется. Затем и в этом варианте следующие друг за другом значения обрабатывают для получения их разностей, и эти разности подвергаются в блоке 34 абсолютному суммированию. На основании просуммированных разностей, полученных в блоках 32 и 34, в блоке 35 определяется длительность, а в блоке 36 путем формирования частного получается частота. Таким же путем в блоке 37 выполняется взвешивание по имеющимся параметрам или по жестко установленным значениям. После этого в блоке 38 определяется взвешенная частота. При наличии соответствующих дополнительных датчиков эта схема прохождения (обработки) сигналов повторяется, как это обозначено сигналами 39.
Группа изобретений относится к технике защиты пешеходов от увечья в случае аварии транспортного средства или дорожно-транспортного происшествия. Заявлены устройство и способ управления средствами защиты людей. Система обнаружения генерирует первый сигнал и в зависимости от частоты второго сигнала, производного от первого сигнала, включает средства защиты людей при аварии или дорожно-транспортном происшествии. Частота определяется в зависимости от первой длительности, являющейся длительностью второго сигнала, и второй длительности, являющейся длительностью проинтегрированного второго сигнала. Группа изобретений позволяет отличить наезд на пешехода от наезда на другие объекты с повышенной точностью и надежностью. Этим обеспечивается эффективная защита пешеходов. 2 н. и 12 з.п. ф-лы, 13 ил.
1. Устройство управления средствами (PS) защиты людей при дорожно-транспортном происшествии, подключаемое к системе (В1-В4) обнаружения аварии, генерирующей первый сигнал, отличающееся тем, что оно содержит схему обработки сигналов, сконфигурированную таким образом, чтобы приводить в действие средства (PS) защиты пассажиров в зависимости от частоты (f) второго сигнала, производного от первого сигнала, причем схема обработки сигналов определяет эту частоту (f) в зависимости от первой длительности, являющейся длительностью второго сигнала, и второй длительности, являющейся длительностью проинтегрированного второго сигнала.
2. Устройство по п.1, отличающееся тем, что схема обработки сигналов сконфигурирована таким образом, чтобы определять первую и вторую длительности в зависимости от абсолютного суммирования разностей следующих друг за другом значений соответственно второго сигнала и второго проинтегрированного сигнала.
3. Устройство по п.1, отличающееся тем, что схема обработки сигналов определяет частоту (f) путем формирования частного первой и второй длительностей.
4. Устройство по одному из пп.1-3, отличающееся тем, что схема обработки сигналов определяет частоты непрерывно.
5. Устройство по п.1, отличающееся тем, что система (В1-В4) обнаружения аварии включает в себя более одного датчика (В1-В4) аварии, а схема обработки сигналов взвешивает и усредняет частоты вторых сигналов от соответствующих датчиков аварии.
6. Устройство по п.5, отличающееся тем, что схема обработки сигналов выполняет взвешивание в зависимости от длительностей проинтегрированных вторых сигналов.
7. Устройство по п.1, отличающееся тем, что система (В1-В4) обнаружения аварии включает в себя инерциальные датчики, предпочтительно датчики ускорений.
8. Устройство по п.1, отличающееся тем, что система обнаружения аварии включает в себя датчики стука.
9. Способ управления средствами (PS) защиты людей при дорожно-транспортном происшествии, предусматривающий использование первого сигнала, генерируемого системой (В1-В4) обнаружения аварии, отличающийся тем, что средства (PS) защиты пассажиров приводят в действие в зависимости от частоты (f) второго сигнала, производного от первого сигнала, причем эту частоту определяют в зависимости от первой длительности, являющейся длительностью второго сигнала, и второй длительности, являющейся длительностью проинтегрированного второго сигнала.
10. Способ по п.9, отличающийся тем, что первую и вторую длительности определяют в зависимости от суммирования разностей следующих друг за другом значений соответственно второго сигнала и второго проинтегрированного сигнала.
11. Способ по п.9, отличающийся тем, что частоту (f) определяют путем формирования частного первой и второй длительностей.
12. Способ по одному из пп.9-11, отличающийся тем, что частоту (f) определяют непрерывно.
13. Способ по п.9, отличающийся тем, что при использовании нескольких датчиков аварии частоты вторых сигналов от этих датчиков взвешивают и усредняют.
14. Способ по п.13, отличающийся тем, что взвешивание выполняют в зависимости от длительностей проинтегрированных вторых сигналов.
| DE 102004042467 A1, 09.03.2006 | |||
| МНОГОМОДОВОЕ ОПТИЧЕСКОЕ ВОЛОКНО С ПРОФИЛЕМ РАСПРЕДЕЛЕНИЯ ПОКАЗАТЕЛЯ ПРЕЛОМЛЕНИЯ, СИСТЕМА ОПТИЧЕСКОЙ СВЯЗИ С ЕГО ИСПОЛЬЗОВАНИЕМ И СПОСОБ ИЗГОТОВЛЕНИЯ ТАКОГО ВОЛОКНА | 2004 |
|
RU2356076C2 |
| СПОСОБ ЛЕГИРОВАНИЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ГОРЯЧЕКАТАНЫХ ТРУБ | 2008 |
|
RU2376118C1 |
| БЕЗОПАСНЫЙ АВТОМОБИЛЬ (ВАРИАНТЫ) | 2002 |
|
RU2223185C2 |

