(54) ШАГАЮЩИЙ ДВИЖИТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2435693C1 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 2011 |
|
RU2476372C1 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 2014 |
|
RU2581290C1 |
| Колесно-шагающий движитель транспортного средства | 1975 |
|
SU596496A1 |
| ШАГАЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2010 |
|
RU2448859C2 |
| ПЛАВУЧЕ-ШАГАЮЩИЙ ДОННЫЙ АППАРАТ | 2001 |
|
RU2214940C2 |
| Колесно-шагающий движитель транспортного средства | 1982 |
|
SU1110708A1 |
| Колесно-шагающий движитель транспортного средства | 2024 |
|
RU2824228C1 |
| Мостовой агрегат для сельскохозяйственных работ | 1990 |
|
SU1780605A1 |
| ШАГАЮЩАЯ ИНВАЛИДНАЯ КОЛЯСКА | 2009 |
|
RU2404900C1 |

Изобретение относится к транспортной технике, а более конкретно к шагающим дви жителям, предназначенным для движения по бездорожью. Известен шагающий движитель, содержащий корпус, подвижно установленный посредством реверсивного привода на горизонтальной штанге, имеющей на своих концах подвижные опоры, снабженные механизмы поворота шталги. Движение этого устройства по местности осуществляется путем перемещения корпуса по щтанге вперед дальше передней опоры, передвижения поднятой задней опоры по штанге вперед, передвижения корпуса назад дальше задней опоры и передвижения штанги вместе с передней опорой вперед. После этого цикл повторяется Г. Недостатком этого устройства является большое количество операций одного цикла передвижения и связанная с этим сложность управления, кроме того, известный движитель не обеспечивает достаточной устойчивости, так как в некоторых моментах цикла передвижения он установлен на местности лишь на одной опоре. Наиболее близким по технической сущности и достигаемому результату является другой известный шагающий движитель, содержащий корпус, смонтированный с возможностью возвратно-поступательного перемещения посредством реверсивного привода на горизонтальной штанге, на концах которой смонтированы пары разнесенных одна относительно другой выдвижных вертикальных опорных стоек,и, прикрепленную к его нижней части на вертикальном шарнире связанную с реверсивным приводом поворота платформу с опорными стойками. Поступательное движение данного шагающего движителя совершается при значительно меньшем количестве операций каждого цикла и, кроме того, он обеспечивает большую устойчивость 2. Однако движение корпуса происходит периодически, так как сначала корпус своими стойками устанавливают на местности и передвигают вперед горизонтальную штангу с поднятыми ее опорными стойками и только затем передвигают вперед корпус по штан ге, при опоре на их опущенные опорные стойки штанги.
Цель изобретения - повышение скорости путем обеспечения его непрерывного поступательного движения.
Поставленная цель достигается тем, что платформа снабжена дополнительной горизонтальной штангой, связанной с приводом ее возвратно-поступательного перемещения, при этом опорные стойки платформы прикреплены к дополнительной штанге аналогично стойкам штанги корпуса а расстояние между наружными крайними точками каждой пары стоек дополнительной штанги меньше расстояния между внутренними крайними точками каждой пары стоек штанги корпуса.
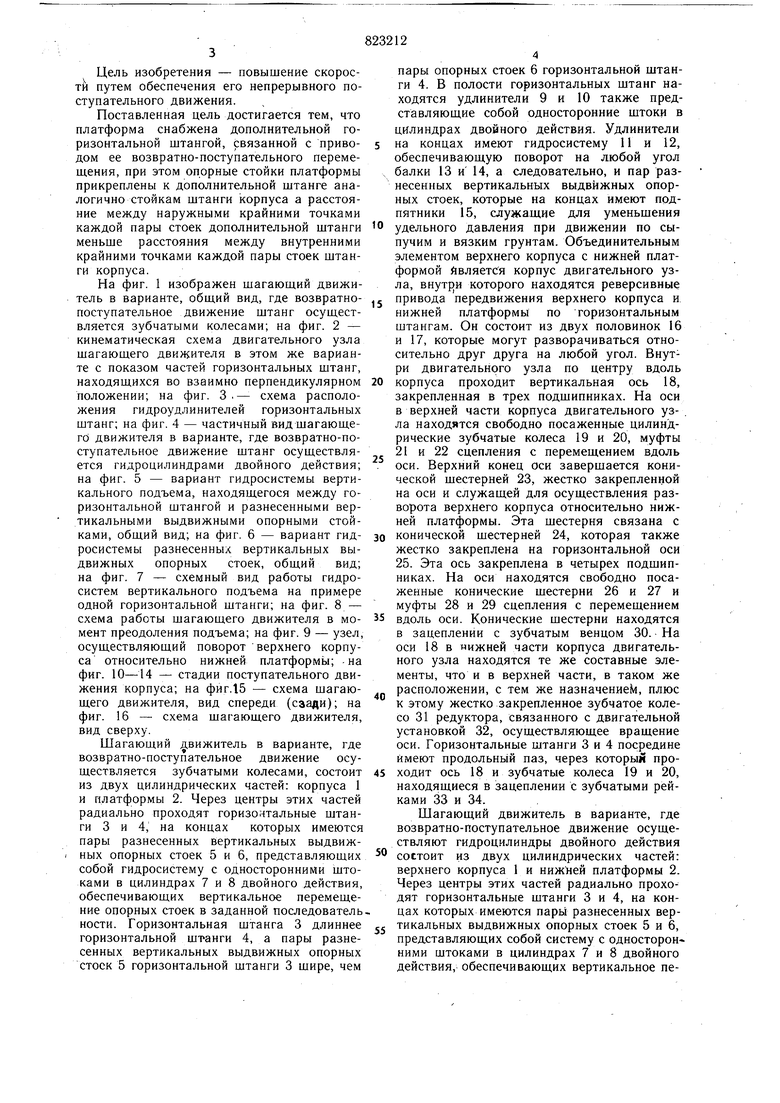
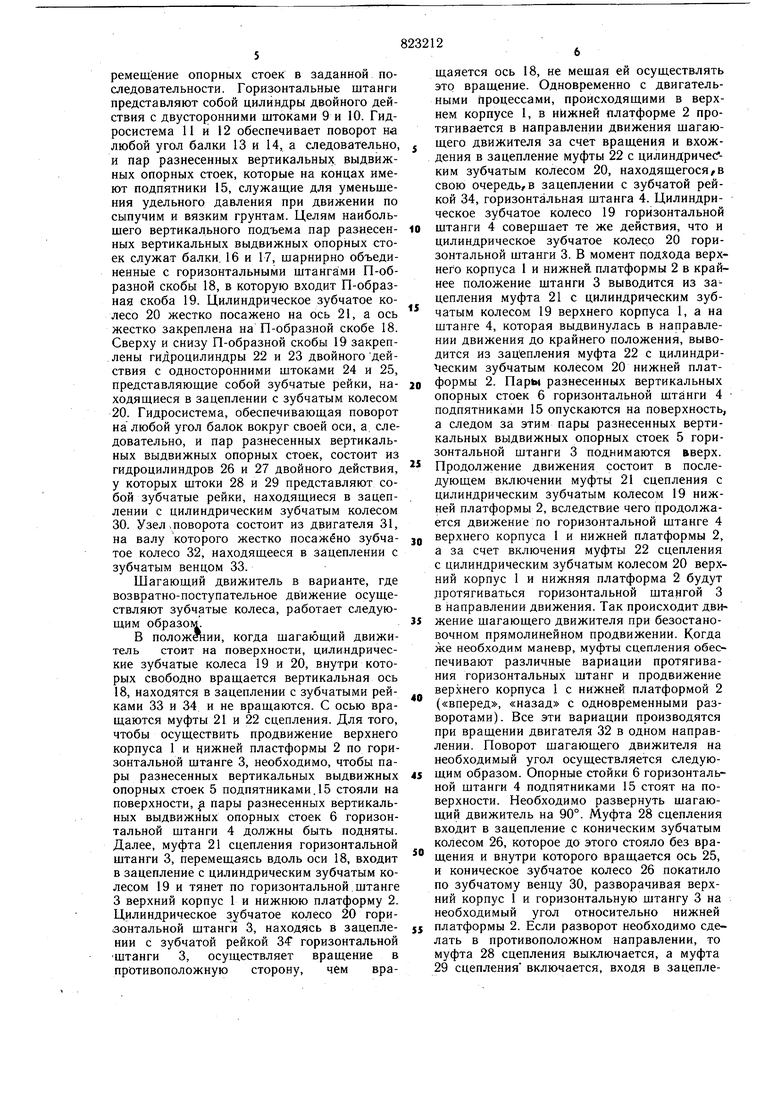
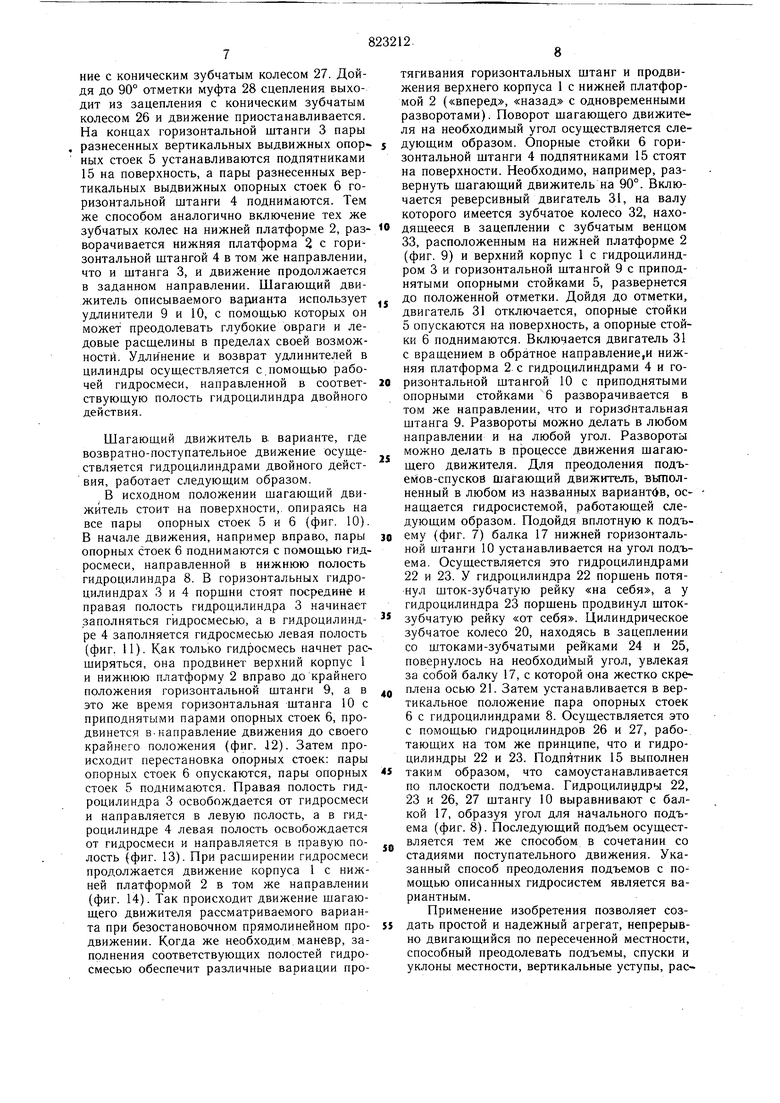
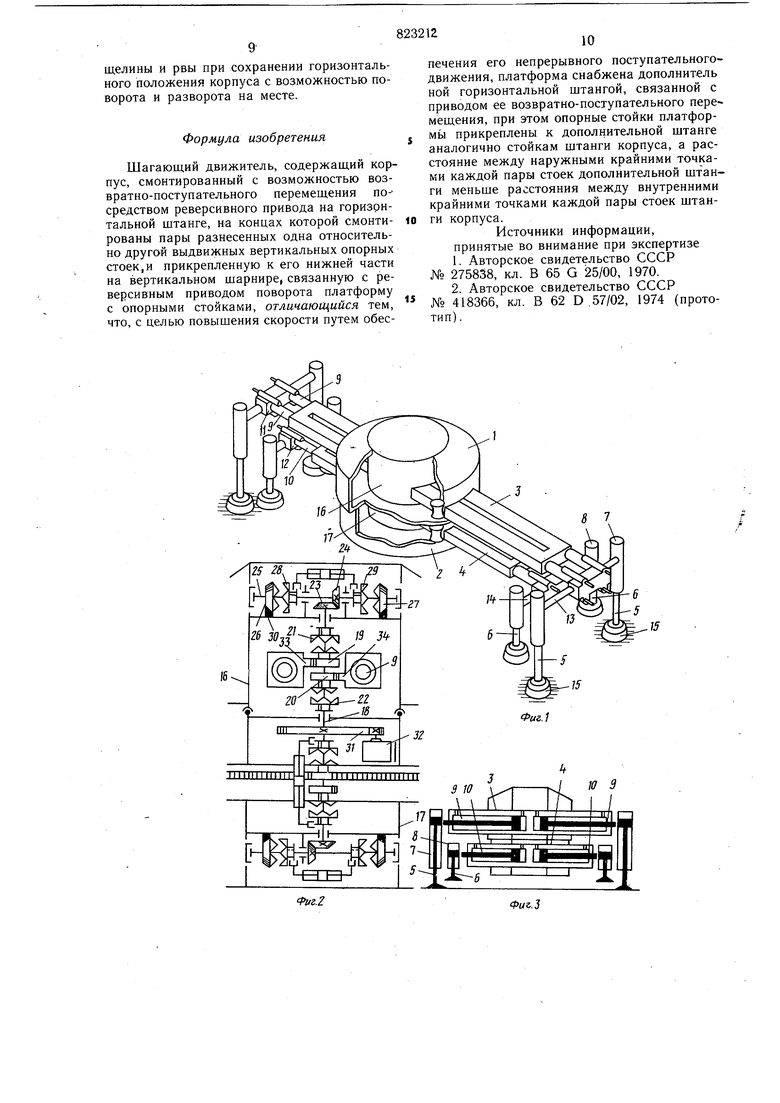
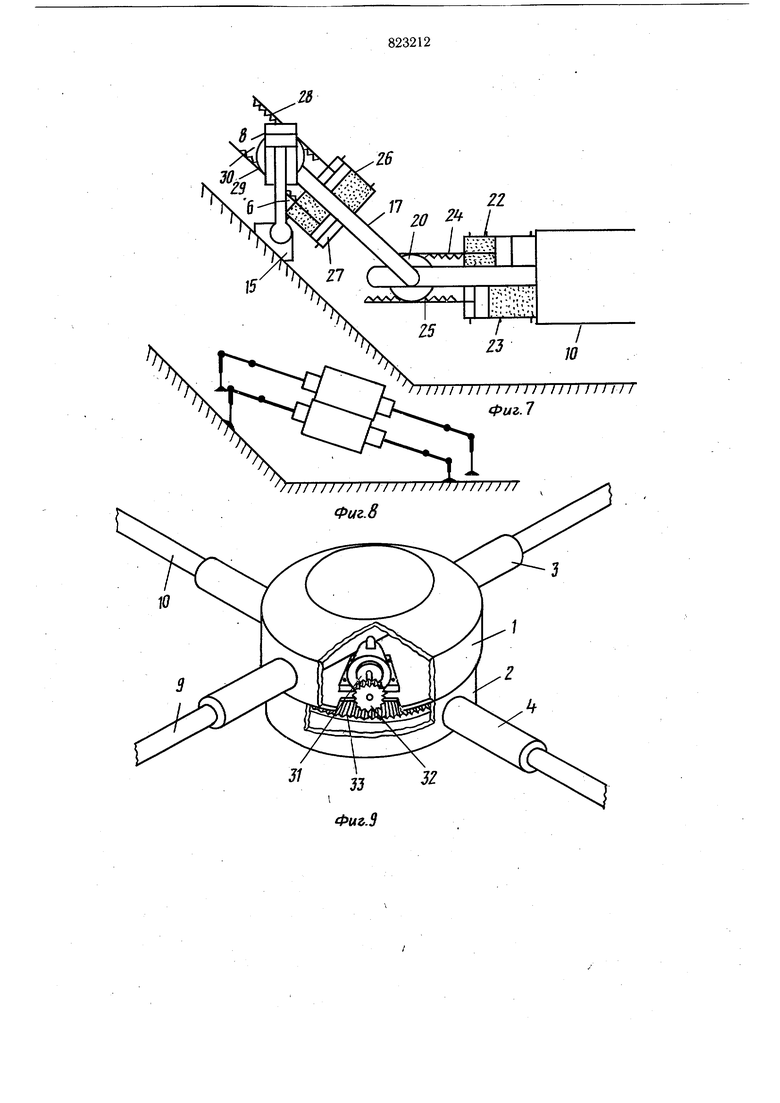
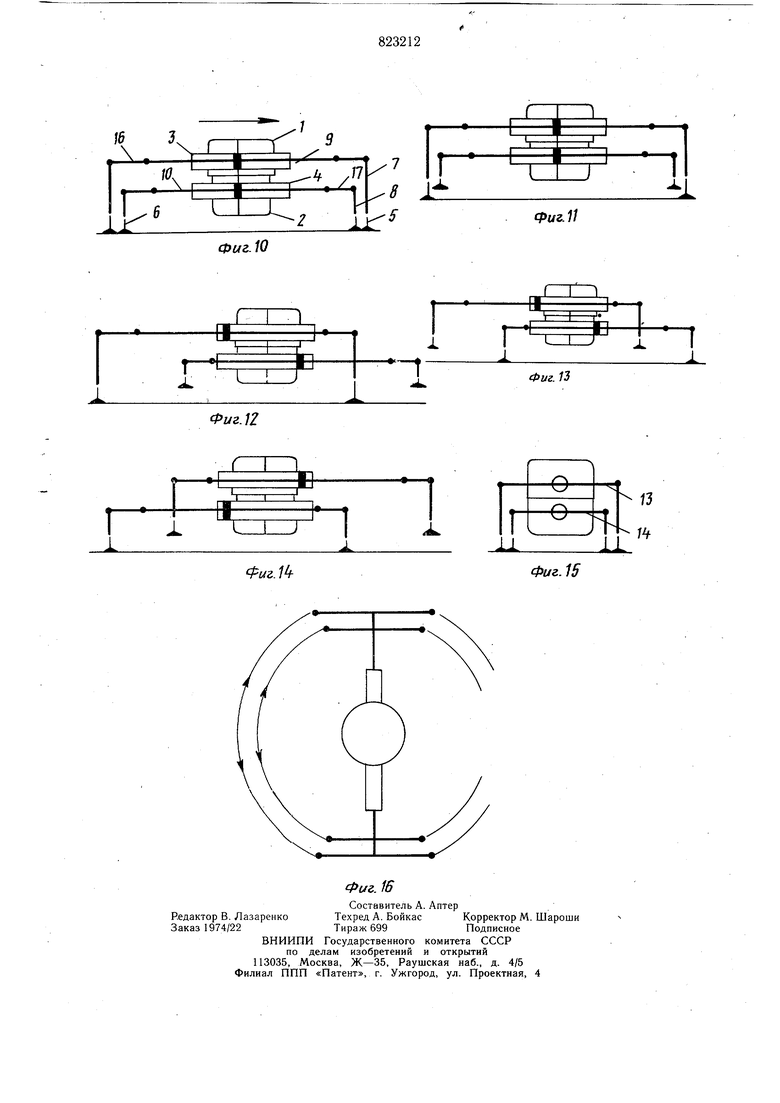
На фиг. 1 изображен шагающий движитель в варианте, общий вид, где возвратнопоступательное движение штанг осуществляется зубчатыми колесами; на фиг. 2 - кинематическая схема двигательного узла шагающего движителя в этом же варианте с показом частей горизонтальных штанг, находящихся во взаимно перпендикулярном положении; на фиг. 3.-- схема расположения гидроудлинителей горизонтальных штанг; на фиг. 4 - частичный вид шагающего движителя в варианте, где возвратно-поступательное движение штанг осуществляется гидроцилиндрами двойного действия; на фиг. 5 - вариант гидросистемы вертикального подъема, находящегося между горизонтальной штангой и разнесенными вертикальными выдвижными опорными стойками, общий вид; на фиг. 6 - вариант гидросистемы разнесенных вертикальных выдвижных опорных стоек, общий вид; на фиг. 7 - схемный вид работы гидросистем вертикального подъема на примере одной горизонтальной щтанги; на фиг. 8 - схема работы шагающего движителя в момент преодоления подъема; на фиг. 9 - узел, осуществляющий поворот верхнего корпуса относительно нижней платформы; -на фиг. 10-14 - стадии поступательного движения корпуса; на фиг.15 - схема щагающего движителя, вид спереди (сзади); на фиг. 16 - схема щагающего движителя, вид сверху.
Шагающий движитель в варианте, где возвратно-поступательное движение осуществляется зубчатыми колесами, состоит из двух цилиндрических частей: корпуса 1 и платформы 2. Через центры этих частей радиально проходят горизонтальные штанги 3 и 4, на концах которых имеются пары разнесенных вертикальных выдвижных опорных стоек 5 и 6, представляющих собой гидросистему с односторонними штоками в цилиндрах 7 и 8 двойного действия, обеспечивающих вертикальное перемещение опорных стоек в заданной последователь, ности. Горизонтальная щтанга 3 длиннее горизонтальной щтанги 4, а пары разнесенных вертикальных выдвижных опорных стоек 5 горизонтальной штанги 3 щире, чем
пары опорных стоек б горизонтальной штанги 4. В полости горизонтальных штанг находятся удлинители 9 и 10 также представляющие собой односторонние щтоки в цилиндрах двойного действия. Удлинители
на концах имеют гидросистему И и 12, обеспечивающую поворот на любой угол балки 13 и 14, а следовательно, и пар разнесенных вертикальных выдвижных опорных стоек, которые на концах имеют подпятники 15, служащие для уменьщения
удельного давления при движении по сыпучим и вязким грунтам. Объединительным элементом верхнего корпуса с нижней платформой йвляется корпус двигательного узла, внутр|и которого находятся реверсивные
привода передвижения верхнего корпуса и нижней платформы по горизонтальным штангам. Он состоит из двух половинок 16 и 17, которые могут разворачиваться относительно друг друга на любой угол. Внутри двигательного узла по центру вдоль
корпуса проходит вертикальная ось 18, закрепленная в трех подщипниках. На оси в верхней части корпуса двигательного узла находятся свободно посаженные цилиндрические зубчатые колеса 19 и 20, муфты 21 и 22 сцепления с перемещением вдоль оси. Верхний конец оси завершается конической щестерней 23, жестко закрепленной на оси и служащей для осуществления разворота верхнего корпуса относительно нижней платформы. Эта шестерня связана с
0 конической щестерней 24, которая также жестко закреплена на горизонтальной оси 25. Эта ось закреплена в четырех подщипниках. На оси находятся свободно посаженные конические щестерни 26 к 27 и муфты 28 и 29 сцепления с перемещением
5 вдоль оси. Конические щестерни находятся в зацеплении с зубчатым венцом 30. На оси 18 в нижней части корпуса двигательного узла находятся те же составные элементы, что и в верхней части, в таком же расположении, с тем же назначение, плюс к этому жестко закрепленное зубчатое колесо 31 редуктора, связанного с двигательной установкой 32, осуществляющее вращение оси. Горизонтальные штанги 3 и 4 посредине имеют продольньш паз, через который проходит ось 18 и зубчатые колеса 19 и 20, находящиеся в зацеплении с зубчатыми рейками 33 и 34.
Шагающий движитель в варианте, где возвратно-поступательное движение осуществляют гидроцилиндры двойного действия
состоит из двух цилиндрических частей: верхнего корпуса 1 и платформы 2. Через центры этих частей радиально прохо дят горизонтальные щтанги 3 и 4, на концах которых имеются парьг разнесенных вер5 тикальных выдвижных опорных стоек 5 и 6, представляющих собой систему с односторонними штоками в цилиндрах 7 и 8 двойного действия, обеспечивающих вертикальное перемещение опорных стоек в заданной последовательности. Горизонтальные штанги представляют собой цилиндры двойного действия с двусторонними штоками 9 и 10. Гидросистема 11 и 12 обеспечивает поворот на любой угол балки 13 и 14, а следовательно, и пар разнесенных вертикальных, выдвижных опорных стоек, которые на концах имеют подпятники 15, служаш,ие для уменьшения удельного давления при движении по сыпучим и вязким грунтам. Целям наибольшего вертикального подъема пар разнесенных вертикальных выдвижных опорных стоек служат балки, 16 и 17, шарнирно объединенные с горизонтальными штанга ми П-образной скобы 18, в которую входит П-образная скоба 19. Цилиндрическое зубчатое колесо 20 жестко посажено на ось 21, а ось жестко закреплена на П-образной скобе 18. Сверху и снизу П-образной скобы 19 закреплены гидроцилиндры 22 и 23 двойногодействия с односторонними штоками 24 и 25, представляющие собой зубчатые рейки, находящиеся в зацеплении с зубчатым колесом 20. Гидросистема, обеспечивающая поворот на любой угол балок вокруг своей оси, а следовательно, и пар разнесенных вертикальных выдвижных опорных стоек, состоит из гидроцилиндров 26 и 27 двойного действия, у которых штоки 28 и 29 представляют собой зубчатые рейки, находящиеся в зацеплении с цилиндрическим зубчатым колесом 30. Узел .поворота состоит из двигателя 31, на валу которого жестко посажёно зубчатое колесо 32, находящееся в зацеплении с зубчатым венцом 33. Шагающий движитель в варианте, где возвратно-поступательное движение осуществляют зубчатые колеса, работает следующим образол. В положетии, когда шагающий движитель стоит на поверхности, цилиндрические зубчатые колеса 19 и 20, внутри которых свободно вращается вертикальная ось 18, находятся в зацеплении с зубчатыми рейками 33 и 34 и не вращаются. С осью вращаются муфты 21 и 22 сцепления. Для того, чтобы осуществить продвижение верхнего корпуса 1 и нижней пластформы 2 по горизонтальной штанге 3, необходимо, чтобы пары разнесенных вертикальных выдвижных опорных стоек 5 подпятниками, 15 стояли на поверхности, пары разнесенных вертикальных выдвижных опорных стоек 6 горизонтальной штанги 4 должны быть подняты. Далее, муфта 21 сцепления горизонтальной щтанги 3, перемещаясь вдоль оси 18, входит в зацепление с цилиндрическим зубчатым колесом 19 и тянет по горизонтальной щтанге 3 верхний корпус 1 и нижнюю платформу 2. Цилиндрическое зубчатое колесо 20 горизонтальной щтанги 3, находясь в зацеплеНИИ с зубчатой рейкой 34 горизонтальной Щтанги 3, осуществляет вращение в противоположную сторону, чем вращаяется ось 18, не мещая ей осуществлять это вращение. Одновременно с двигательными процессами, происходящими в верхнем корпусе 1, в нижней платформе 2 протягивается в направлении движения шагающего движителя за счет вращения и вхождения в зацепление муфты 22 с цилиндричес ким зубчатым колесом 20, находящегося/ в свою очередь,в зацеплении с зубчатой рейкой 34, горизонтальная штанга 4. Цилиндрическое зубчатое колесо 19 горизонтальной штанги 4 совершает те же действия, что и цилиндрическое зубчатое колесо 20 горизонтальной штанги 3. В момент подхода верхнего корпуса 1 и нижней, платформы 2 в крайнее положение штанги 3 выводится из зацепления муфта 21 с цилиндрическим зубчатым колесом 19 верхнего корпуса 1, а на штанге 4, которая выдвинулась в направлении движения до крайнего положения, выводится из зацепления муфта 22 с цилиндрическим зубчатым колесом 20 нижней платформы 2. Пары разнесенных вертикальных опорных стоек 6 горизонтальной штанги 4 подпятниками 15 опускаются на поверхность, а следом за этим пары разнесенных вертикальных выдвижных опорных стоек 5 горизонтальной штанги 3 поднимаются вверх. Продолжение движения состоит в последующем включении муфты 21 сцепления с цилиндрическим зубчатым колесом 19 нижней платформы 2, вследствие чего продолжается движение по горизонтальной штанге 4 верхнего корпуса 1 и нижней платформы 2, а за счет включения муфты 22 сцепления с цилиндрическим зубчатым колесом 20 верхний корпус 1 и нижняя платформа 2 будут протягиваться горизонтальной штангой 3 в направлении движения. Так происходит движение шагающего движителя при безостановочном прямолинейном продвижении. Когда же необходим маневр, муфты сцепления обеспечивают различные вариации протягивания горизонтальных штанг и продвижение верхнего корпуса 1 с нижней платформой 2 («вперед, «назад с одновременными разворотами). Все эти вариации производятся при вращении двигателя 32 в одном направлении. Поворот шагающего движителя на необходимый угол осуществляется следующим образом. Опорные стойки 6 горизонтальной штанги 4 подпятниками 15 стоят на поверхности. Необходимо развернуть шагающий движитель на 90°. Муфта 28 сцепления входит в зацепление с коническим зубчатым колесом 26, которое до этого стояло без вращения и внутри которого вращается ось 25, и коническое зубчатое колесо 26 покатило по зубчатому венцу 30, разворачивая верхний корпус 1 и горизонтальную щтангу 3 на необходимый угол относительно нижней платформы 2. Если разворот необходимо сделать в противоположном направлении, то муфта 28 сцепления выключается, а муфта 29 сцепления включается, входя в зацепление с коническим зубчатым колесом 27. Дойдя до 90° отметки муфта 28 сцепления выходит из зацепления с коническим зубчатым колесом 26 и движение приостанавливается. На концах горизонтальной штанги 3 пары разнесенных вертикальных выдвижных опор ных стоек 5 устанавливаются подпятниками 15 на поверхность, а пары разнесенных вертикальных выдвижных опорных стоек 6 горизонтальной штанги 4 поднимаются. Тем же способом аналогично включение тех же зубчатых колес на нижней платформе 2, разворачивается нижняя платформа 2 с горизонтальной штангой 4 в том же направлении, что и штанга 3, и движение продолжается в заданном направлении. Шагающий движитель описываемого варианта использует удлинители 9 и 10, с помощью которых он может преодолевать глубокие овраги и ледовые расщелины в пределах своей возможности. Удлинение и возврат удлинителей в цилиндры осуществляется с.помощью рабочей гидросмеси, направленной в соответствующую полость гидроцилиндра двойного действия.
Шагающий движитель в. варианте, где возвратно-поступательное движение осуществляется гидроцилиндрами двойного действия, работает следующим образом.
В исходном положении щагающий движитель стоит на поверхности,, опираясь на все пары опорных стоек 5 и 6 {фиг. 10). В начале движения, например вправо, пары опорных стоек 6 поднимаются с помощью гидросмеси, направленной в нижнюю полость гидроцилиндра 8. В горизонтальных гидроцилиндрах 3 и 4 поршни стоят посредине и правая полость гидроцилиндра 3 начинает заполняться гидросмесью, а в гидроцилиндре 4 заполняется гидросмесью левая полость (фиг. 11). Как только гидросмесь начнет расширяться, она продвинет верхний корпус 1 и нижнюю платформу 2 вправо до крайнего положения горизонтальной штанги 9, а в это же время горизонтальная штанга 10 с приподнятыми парами опорных стоек 6, продвинется Б.направление движения до своего крайнего положения (фиг. J2). Затем происходит перестановка опорных стоек: пары опорных стоек 6 опускаются, пары опорных стоек 5 поднимаются. Правая полость гидроцилиндра 3 освобождается от гидросмеси и направляется в левую полость, а в гидроцилиндре 4 левая полость освобождается от гидросмеси и направляется в правую полость (фиг. 13). При расширении гидросмеси продолжается движение корпуса 1 с нижней платформой 2 в том же направлении (фиг. 14). Так происходит движение шагающего движителя рассматриваемого варианта при безостановочном прямолинейном продвижении. Когда же необходим маневр, заполнения соответствующих полостей гидросмесью обеспечит различные вариации протягивания горизонтальных штанг и продвижения верхнего корпуса 1 с нижней платформой 2 («вперед, «назад с одновременными разворотами). Поворот шагающего движителя на необходимый угол осуществляется следующим образом. Опорные стойки 6 горизонтальной штанги 4 подпятниками 15 стоят на поверхности. Необходимо, например, развернуть щагающий движитель на 90°. Включается реверсивный двигатель 31, на валу которого имеется зубчатое колесо 32, находящееся в зацеплении с зубчатым венцом 33, расположенным на нижней платформе 2 (фиг. 9) и верхний корпус 1 с гидроцилиндром 3 и горизонтальной штангой 9 с приподнятыми опорными стойками 5, развернется
до положенной отметки. Дойдя до отметки, двигатель 31 отключается, опорные стойки
5опускаются на поверхность, а опорные стойки 6 поднимаются. Включается двигатель 31 с вращением в обратное направление,и нижняя платформа 2, с гидроцилиндрами 4 и горизонтальной щтангой 10 с приподнятыми опорными стойками 6 разворачивается в том же направлении, что и горизонтальная штанга 9. Развороты можно делать в любом направлении и на любой угол. Развороты можно делать в процессе движения щагающего движителя. Для преодоления подъемов-спусков шагающий движитель, выполненный в любом из названных вариантов, оснащается гидросистемой, работающей следующим образом. Подойдя вплотную к подъ0 ему (фиг. 7) балка 17 нижней горизонтальной щтанги 10 устанавливается на угол подъема. Осуществляется это гидроцилиндрами
22и 23. У гидроцилиндра 22 порщень потянул щток-зубчатую рейку «на себя, а у гидроцилиндра 213 порщень продвинул щток зубчатую рейку «от себя. Цилиндрическое зубчатое колесо 20, находясь в зацеплении со щтоками-зубчатыми рейками 24 и 25, повернулось на необходимый угол, увлекая за собой балку 17, с которой она жестко скреплена осью 21. Затем устанавливается в вертикальное положение пара опорных стоек
6с гидроцилиндрами 8. Осуществляется это с помощью гидроцилиндров 26 и 27, работающих на том же принципе, что и гидроцилиндры 22 и 23. Подпятник 15 выполнен
таким образом, что самоустанавливается по плоскости подъема. Гидроцилиндры 22,
23и 26, 27 щтангу 10 выравнивают с балкой 17, образуя угол для начального подъема (фиг. 8). Последующий подъем осуществляется тем же способом в сочетании со стадиями поступательного движения. Указанный способ преодоления подъемов с помощью описанных гидросистем является вариантным.
Применение изобретения позволяет соз5 дать простой и надежный агрегат, непрерывно двигающийся по пересеченной местности, способный преодолевать подъемы, спуски и уклоны местности, вертикальные уступы, рас целины и рвы при сохранении горизонтального положения корпуса с возможностью поворота и разворота на месте.
Формула изобретения
Шагающий движитель, содержащий корпус, смонтированный с возможностью возвратно-поступательного перемещения по-средством реверсивного привода на горизонтальной щтанге, на концах которой смонтированы пары разнесенных одна относительно другой выдвижных вертикальных опорных стоек,и прикрепленную к его нижней части на вертикальном щарнире, связанную с реверсивным приводом поворота платформу с опорными стояками, отличающийся тем, что, с целью повышения скорости путем обесФиг.2
печения его непрерывного поступательногодвижения, платформа снабжена дополнитель ной горизонтальной щтангой, связанной с приводом ее возвратно-поступательного перемещения, при этом опорные стойки платформы прикреплены к дополнительной штанге аналогично стойкам щтанги корпуса, а расстояние между наружными крайними точками каждой пары стоек дополнительной щтанги меньше расстояния между внутренними крайними точками каждой пары стоек щтан0ги корпуса.
Источники информации, принятые во внимание при экспертизе
№ 418366, кл. В 62 D.57/02, 1974 (прототип).
k
Фи.З .Фиг. 6 С- t ч
///////////////////////////
I 1111 I П I I/ 1111 1111//////
ФигЛ
Фиг. 10
Фиг. 11
