1
(21)4812207/11 (22) 09.04.90 (46)23.11.92. Бюл. №43
(71)Волгоградский политехнический институт
(72)А.Н.Тонконогов и В.В.Жога
(56)Авторское свидетельство СССР № 1228383, кл. В 62 D 57/02, 1987.
Авторское свидетельство СССР Ns1669134, кл. В 62 D 57/02, 1990.
(54) ШАГАЮЩИЙ ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА
(57)Изобретение относится к шагающим движителям, применяемым в высокопроходимых транспортных средствах. Цель изобретения - повышение КПД и надежности работы шагающего движителя. Шагающий движитель содержит корпус с приводом вращения, кривошип которого шарнирно соединен с ползуном, установленным на кулисе, шарнирно прикрепленной нижним концом к корпусу, а верхним - к опорной стойке, механизм подъема опорной пяты, каретку, установленную в направляющих корпуса, пружину, размещенную перпендиИзобретение относится к шагающим движителям, используемым в высокопроходимых транспортных средствах.
Известен шагающий движитель транспортного средства, содержащий соединенную с приводным кривошипом вертикальную стойку, верхний конец которой подвижно связан с корпусом, а нижний шарнирно связан с опорной пятой. Он снабжен подъемным кривошипом, вал которого установлен в вертикальной направляющей
кулярно ходу каретки. Кинематическая связь каретки с нижним концом кулисы выполнена в виде жестко установленного на нем зубчатого колеса и сверху и снизу зацепленных с ним, установленных в направляющих каретки двух зубчатых реек, взаимодействующих торцами с внутренней поверхностью каретки, причем на торце верхней зубчатой рейки выполнен упор, утапливающий в ее крайнем положении установленный на каретке фиксатор ее положения в направляющих корпуса. При движении кулисы из крайнего левого положения в вертикальное усилие пружины передается каретке и через зубчатую рейку и зубчатое колесо кулисе, помогая приводному двигателю ускорить движение стойки. При движении кулисы из вертикального положения в крайнее правое усилие от кулисы через зубчатое колесо передается рейке, которая отводит каретку в крайнее левое положение, сжимая пружину. Каретка фиксируется в крайнем левом положении. При движении кулисы из крайнего правого в крайнее левое положение стойка совершает рабочий ход. 3 ил.
корпуса и приводной кривошип соединен со стойкой ползуном.
В этом техническом решении в цикле движения опорной стойки имеется пиковое значение потребляемой мощности, а также пиковое значение энергии, рассеиваемой в процессе движения, поэтому необходимо применять приводной двигатель повышенной мощности для компенсации пиковых значений потребляемой мощности, что присл
с
XI XI О О О ГО
водит к усложнению системы управления и увеличению веса движителя.
Наиболее близким из известных технических решений является шагающий движитель транспортного средства, содержащий силовой привод, кривошип которого соединен через ползун с кулисой, шарнирно установленной на корпусе, механизм подъема стойки. Кулиса с помощью тяги связана с кареткой, установленной в направляющих корпуса и соединенной с корпусом пружиной, расположенной перпендикулярно ходу каретки. В полости каретки размещен кулачок, взаимодействующий с ее внутренней поверхностью и соединенный с кулисой посредством механизма свободного хода.
В данном шагающем движителе наличие кулачка обусловливает значительные потери энергии на трение, что снижает механический КПД движителя. Наличие механизма свободного хода уменьшает надежность работы устройства. Тяга, соединяющая каретку с кулисой, передает усилие пружины кулисе под переменным углом, что вызывает появление дополнительных реакций в шарнирах кулисы, что также вызывает дополнительные затраты мощности.
Целью изобретения является повышение КПД и надежности работы шагающего движителя.
Эта цель достигается тем, что в шагающем движителе транспортного средства кинематическая связь каретки с нижним концом кулисы выполнена в виде жестко установленного на нем зубчатого колеса и сверху и снизу зацепленных с ним, установленных в горизонтальных направляющих каретки двух зубчатых реек, попеременно взаимодействующих своими торцами с внутренней торцовой поверхностью каретки, причем на торце верхней зубчатой рейки выполнен упор, утапливающий в ее крайнем положении установленный на каретке фиксатор ее положения в направляющих корпуса, что позволяет снизить затраты энергии, расходуемой на трение скольжения.
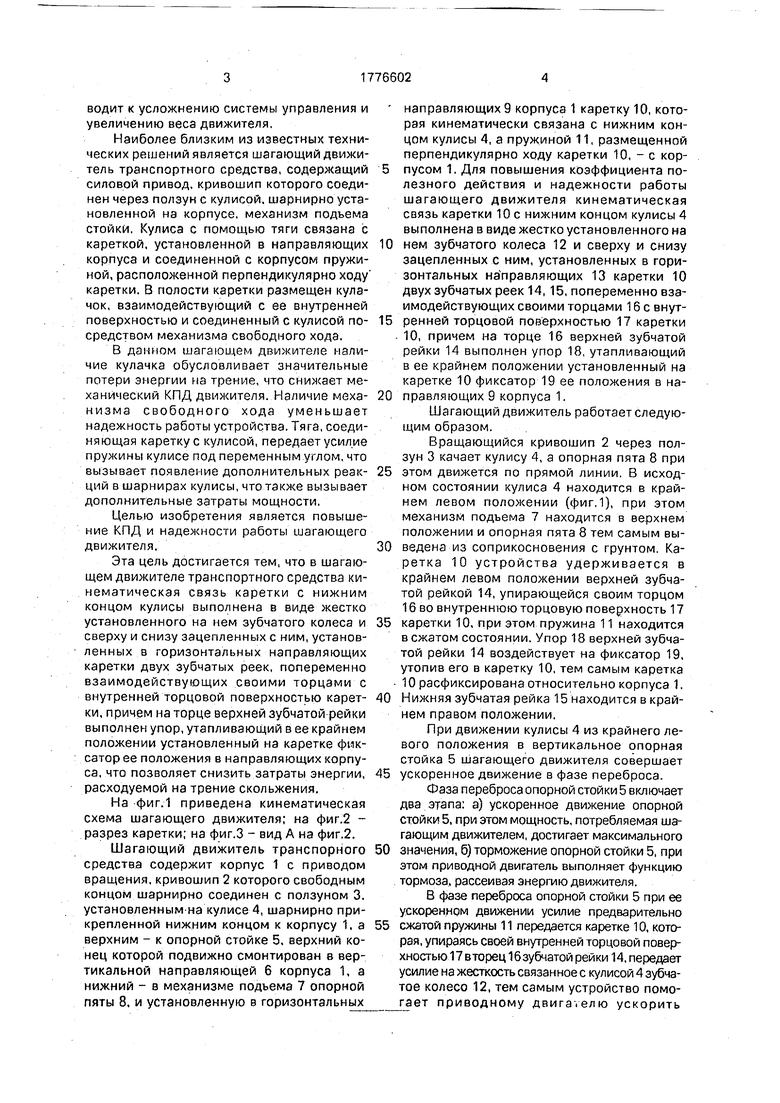
На фиг.1 приведена кинематическая схема шагающего движителя; на фиг.2 - разрез каретки; на фиг.З - вид А на фиг,2.
Шагающий движитель транспорного средства содержит корпус 1 с приводом вращения, кривошип 2 которого свободным концом шарнирно соединен с ползуном 3. установленным-на кулисе 4, шарнирно прикрепленной нижним концом к корпусу 1, а верхним - к опорной стойке 5, верхний конец которой подвижно смонтирован в вертикальной направляющей 6 корпуса 1, а нижний - в механизме подъема 7 опорной пяты 8, и установленную в горизонтальных
направляющих 9 корпуса 1 каретку 10, которая кинематически связана с нижним концом кулисы 4, а пружиной 11, размещенной перпендикулярно ходу каретки 10, - с корпусом 1. Для повышения коэффициента полезного действия и надежности работы шагающего движителя кинематическая связь каретки 10 с нижним концом кулисы 4 выполнена в виде жестко установленного на
0 нем зубчатого колеса 12 и сверху и снизу зацепленных с ним, установленных в горизонтальных направляющих 13 каретки 10 двух зубчатых реек 14,15, попеременно взаимодействующих своими торцами 16 с внут5 ренней торцовой поверхностью 17 каретки 10, причем на торце 16 верхней зубчатой рейки 14 выполнен упор 18, утапливающий в ее крайнем положении установленный на каретке 10 фиксатор 19 ее положения в на0 правляющих 9 корпуса 1.
Шагающий движитель работает следующим образом.
Вращающийся кривошип 2 через ползун 3 качает кулису 4, а опорная пята 8 при
5 этом движется по прямой линии. В исходном состоянии кулиса 4 находится в крайнем левом положении (фиг.1), при этом механизм подъема 7 находится в верхнем положении и опорная пята 8 тем самым вы0 ведена из соприкосновения с грунтом. Каретка 10 устройства удерживается в крайнем левом положении верхней зубчатой рейкой 14, упирающейся своим торцом 16 во внутреннюю торцовую поверхность 17
5 каретки 10, при этом пружина 11 находится в сжатом состоянии. Упор 18 верхней зубчатой рейки 14 воздействует на фиксатор 19, утопив его в каретку 10, тем самым каретка 10 расфиксирована относительно корпуса 1.
0 Нижняя зубчатая рейка 15 находится в крайнем правом положении.
При движении кулисы 4 из крайнего левого положения в вертикальное опорная стойка 5 шагающего движителя совершает
5 ускоренное движение в фазе переброса.
Фаза переброса опорной стойки 5 включает два этапа: а) ускоренное движение опорной стойки 5, при этом мощность, потребляемая шагающим движителем, достигает максимального
0 значения, б) торможение опорной стойки 5, при этом приводной двигатель выполняет функцию тормоза, рассеивая энергию движителя.
В фазе переброса опорной стойки 5 при ее ускоренном движении усилие предварительно
5 сжатой пружины 11 передается каретке 10, которая, упираясь своей внутренней торцовой поверхностью 17 вторец 16 зубчатой рейки 14, передает усилие на жесткость связанное с кулисой 4 зубчатое колесо 12, тем самым устройство помогает приводному двигателю ускорить
движение опорной стойки 5. Зубчатая рейка 15 при этом движется навстречу каретке 10.
При вертикальном положении кулисы 4 обе зубчатые рейки 14 и 15 упираются своими торцами 16 во внутреннюю торцовую поверхность 17 каретки 10, которая находится при этом в своем крайнем правом положении.
При движении кулисы 4 из вертикального положения в крайнее правое усилие от кулисы 4 через жестко связанное с ней зубчатое колесо 12 передается зубчатой рейке 15, которая отводит каретку 10 в крайнее левое положение, сжимая пружину 11 и тем самым запасая избыточную энергию движи- теля. Зубчатая рейка 14 и каретка 10 двигаются в противоположные стороны, при этом упор 18 отпускает фиксатор 19 каретки 10. Каретка 10 фиксируется относительно корпуса 1 в крайнем левом положении,
При движении кулисы 4 из крайнего правого в крайнее левое положение опорная стойка 5 совершает рабочий ход. При этом механизм подъема 7 опускает опорную пяту 8 на грунт. В конце рабочего хода зуб- чатая рейка 14 упором 18 утапливает фиксатор 19, выводя его из зацепления с корпусом 1, тем самым производится рас- фиксация каретки 10 относительно корпуса 1. Подъемный механизм 7 в конце рабочего хода опорной стойки 5 поднимает опорную пяту 8. Далее цикл повторяется.
Таким образом, предлагаемый шагающий движитель транспортного средства работает с минимальными затратами энергии на трение скольжения, при этом надежность его работы увеличивается. Он потребляет непрерывно номинальное значение энергии, что позволяет существенно уменьшить мощность источника энергии, а вместе с тем его габариты и вес, что для автономного шагающего движителя транспортного средства имеет решающее значение. Формула изобретения Шагающий движитель транспортного средства, содержащий корпус с приводом вращения, кривошип которого свободным концом шарнирно соединен с ползуном, установленным на кулисе, шарнирно прикрепленной нижним концом к корпусу, а верхним - к опорной стойке, верхний конец которой подвижно смонтирован в вертикальной направляющей корпуса, а нижний - в механизме подъема опорной пяты, и установленную в горизонтальных направляющих корпуса каретку, которая кинематически связана с нижним концом кулисы, а пружиной, размещенной перпендикулярно ходу каретки, -с корпусом, отличающий- с я тем, что, с целью повышения коэффициента полезного действия и надежности работы, кинематическая связь каретки с нижним концом кулисы выполнена в виде жестко установленного на нем зубчатого колеса и за- цепленных с ним установленных в горизонтальных направляющих каретки верхней и нижней зубчатых реек для попеременного взаимодействия своими торцами с внутренней торцовой поверхностью каретки, причем на торце верхней зубчатой рейки выполнен упор, утапливающий в ее крайнем положении установленный на каретке фиксатор ее положения в направляющих корпуса,

| название | год | авторы | номер документа |
|---|---|---|---|
| Кривошипно-ползунный направляющий механизм для ноги шагающего движителя | 1990 |
|
SU1751038A1 |
| Колесно-шагающий движитель транспортного средства | 2024 |
|
RU2824228C1 |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2435693C1 |
| ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2003 |
|
RU2255875C1 |
| ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2010 |
|
RU2452646C2 |
| МНОГООПОРНАЯ ШАГАЮЩАЯ МАШИНА | 2003 |
|
RU2258624C2 |
| Шагающий движитель | 1978 |
|
SU823212A1 |
| ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2011 |
|
RU2489296C2 |
| ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2516958C1 |
| ИНВАЛИДНАЯ ШАГАЮЩАЯ КРЕСЛО-КОЛЯСКА | 2010 |
|
RU2434622C1 |
SS/ssSsSAttyjVsS/ss3К /
Фиг J
