Подъемник относится к грузоподъемному оборудованию, предназначенному для транспортировки различных грузов, а также лиц с ограниченными физическими возможностями над лестничными площадками и маршами в зданиях жилого, производственного и иного назначения.
Известен подъемник (патент EP 0088061 B1, B66B 9/08), содержащий направляющую, неподвижно укрепленную над лестничными площадками и маршами, смонтированную на направляющей каретку, имеющую ведущее колесо, прижимающееся к направляющей и за счет сил трения создающее при своем вращении тяговое усилие вдоль направляющей, привод вращения ведущего колеса, шарнирно соединенное с кареткой подвесное устройство для груза, а также электронный блок с пультом управления приводом вращения ведущего колеса.
Подъемник имеет недостатки.
Во-первых, подвесное устройство соединено с кареткой одним шарниром. В аварийной ситуации при экстренном торможении подъемника подвесное устройство под действием сил инерции может отклониться от нормального транспортного положения на недопустимо большую величину, что может вызвать падение груза или нанести вред здоровью пользователя. Эксплуатация такого подъемника небезопасна.
Во-вторых, невозможен подъем подвесного устройства настолько, чтобы обеспечить безопасность использования лестничных площадок и маршей другими лицами в то время, когда подъемник находится в режиме ожидания или движется незагруженным с одного этажа на другой к месту погрузки.
Наиболее близким к предлагаемому техническому решению является подъемник (патент DE 3636440 C1, B66B 9/08), содержащий направляющую, неподвижно укрепленную над лестничными площадками и маршами, смонтированную на направляющей каретку, имеющую ведущее колесо, взаимодействующее с направляющей и создающее при своем вращении тяговое усилие вдоль направляющей, привод вращения ведущего колеса, шарнирно соединенное с кареткой подвесное устройство с захватами груза, а также привод подъема и опускания захватов груза.
Недостаток подъемника в том, что захваты груза соединены одним шарниром с подвесным устройством. При экстренном торможении скатывающегося вниз подъемника захваты груза, повернувшись вокруг оси вышеуказанного шарнира, могут отклониться от требуемого транспортного положения. Это может привести к падению и повреждению груза, а также нанести вред здоровью лиц, оказавшихся в этот момент вблизи подъемника. Такой подъемник не отвечает требованиям безопасности.
Целью предлагаемого изобретения является повышение безопасности эксплуатации подъемника.
Указанная цель достигается тем, что подвесное устройство содержит три стержня и балку, расположенные в вертикальной плоскости, шарнирное соединение подвесного устройства с кареткой выполнено верхними окончаниями стержней в двух разнесенных по горизонтали точках, нижними окончаниями стержни шарнирно соединены с балкой так, что они образуют вместе с кареткой и балкой два смежных контура треугольной формы, причем захваты груза неподвижно укреплены на балке.
При такой форменной конструкции подвесного устройства оно способно воспринимать горизонтальные динамические нагрузки в плоскости своего расположения без значительных деформаций и перемещений. Следовательно, захваты груза, неподвижно прикрепленные к балке подвесного устройства, могут сохранить требуемое транспортное положение в случае действия динамических нагрузок при экстренном торможении подъемника. За счет этого повышается безопасность транспортировки груза при аварийных ситуациях.
В предлагаемой конструкции подъемника привод подъема и опускания захватов груза выполнен в виде электровинтовых устройств, смонтированных на каждом стержне подвесного устройства так, что они обеспечивают возможность изменения длины стержней и их ограниченного поворота в вертикальной плоскости.
Появилась возможность поднимать балку с захватами груза настолько, чтобы обеспечить безопасность использования лестничных площадок и маршей по прямому назначению во время простоя подъемника или движения незагруженным с одного этажа на другой по команде пользователя. Повышается безопасность эксплуатации подъемника.
Электровинтовые устройства, смонтированные на стержнях, обладают высокой продольной жесткостью. Это делает жесткой стержневую, форменную конструкцию подвесного устройства. Снижается вероятность раскачивания груза при его транспортировке. Повышается безопасность эксплуатации подъемника.
Новым является и то, что электронный блок способен управлять в автоматическом режиме работой электровинтовых устройств так, что при подъеме, опускании захватов груза и его транспортировке обеспечивается постоянная величина угла наклона балки к вертикали.
Это дает возможность в любой момент эксплуатации подъемника сохранять требуемое положение балки и захватов для груза. Исключаются перекосы и падения груза. Повышается безопасность эксплуатации подъемника.
То, что электровинтовые устройства смонтированы на каждом стержне и имеется возможность согласованного управления их работой посредством электронного блока, делает возможным вертикальный подъем или опускание захватов груза перед началом транспортировки или разгрузки без сопутствующего горизонтального смещения. Это обеспечивает безопасность погрузки и разгрузки подъемника.
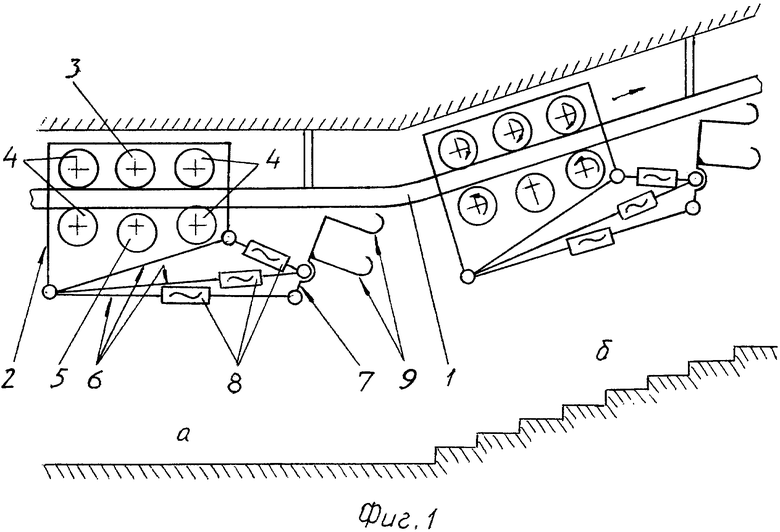
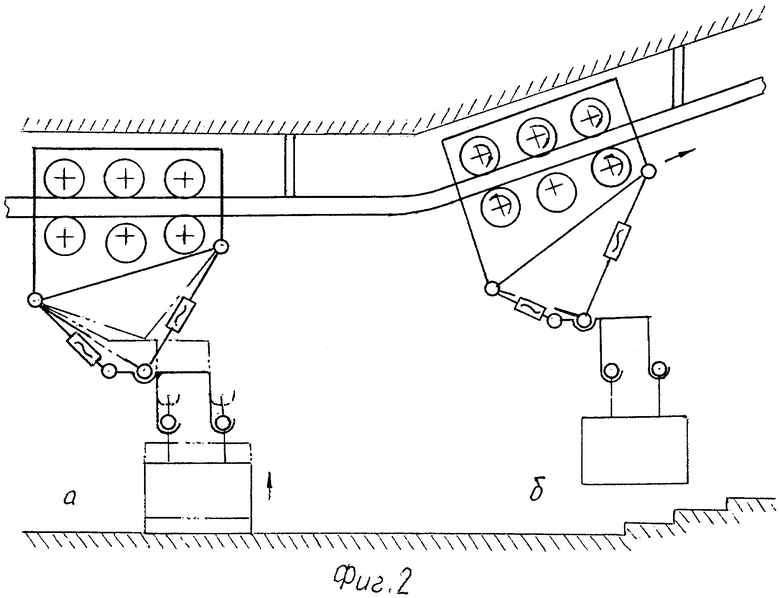
На Фиг.1 показаны схемы подъемника в момент простоя а) и движения незагруженным с этажа на этаж б), на Фиг.2 - в моменты подъема захватов груза перед началом движения а) и движения загруженного подъемника над лестничным маршем б).
Подъемник состоит из неподвижно укрепленной направляющей 1, смонтированной на ней каретки 2, содержащей ведущее колесо 3, например, облицованное полиуретаном - фрикционным эластомером, опорные ролики 4, ловитель 5 эксцентрикового типа для экстренного торможения подъемника. Ведущее колесо 3 и ловитель 5 имеют размещенные на каретке приводы вращения. Ведущее колесо 3 и опорные ролики 4 прижимаются к направляющей настолько, чтобы обеспечить возникновение тягового усилия и исключить возможность вертикального перемещения каретки 2 относительно направляющей 1. Подвесное устройство включает три стержня 6, соединенные шарнирно с кареткой 2 и балкой 7. На стержнях 6 смонтированы электровинтовые устройства 8. На балке 7 неподвижно укреплены захваты груза 9. Электронный блок управления приводами смонтирован на каретке 2 подъемника.
Подъемник работает следующим образом. В исходном положении он не загружен и находится над лестничной площадкой без движения. За счет электровинтовых устройств 8 стержни 6 подвесного устройства имеют такие длины, при которых балка 7 с захватами груза 9 находится в верхнем положении. Подъемник не препятствует использованию лестничной площадки по прямому назначению.
При необходимости загрузки подъемника на другом этаже, например на одном из верхних, пользователь с пульта дистанционного управления подает команду электронному блоку на включение привода вращения ведущего колеса 3. Подъемник начинает движение над лестничным маршем с поднятыми захватами груза 9. При этом обеспечивается безопасность лиц, находящихся на лестничном марше. По прибытии на требуемый этаж электронный блок автоматически отключает питание привода вращения ведущего колеса 3. Подъемник останавливается в месте, удобном для его загрузки. По команде пользователя с пульта электронный блок включает работу электровинтовых устройств 8 стержней 6 подвесного устройства. За счет согласованного изменения длины стержней 6 происходит их поворот. Балка 7 и захваты для груза 9 опускаются вниз. Причем в конечной фазе этого движения захваты опускаются вертикально. Это обеспечивает удобство и безопасность операции загрузки подъемника.
После загрузки пользователь посредством пульта управления подает команду на движение подъемника с указанием этажа его разгрузки. Вначале электронный блок включает работу электровинтовых устройств 8 стержней 6 так, что балка 7, сохраняя постоянный угол своего наклона к вертикали, поднимается вертикально вверх. Груз поднимается над лестничной площадкой. После этого электронный блок включает в работу привод вращения ведущего колеса 3. Подъемник начинает движение над лестничным маршем. Одновременно с началом движения электронный блок включает согласованную работу электровинтовых устройств 8. В соответствии с заложенной в нем информацией о форме направляющей электронный блок задает такой режим работы каждого из вышеуказанных устройств, который обеспечивает постоянство угла наклона балки 7 к вертикали. В результате захваты груза 9 находятся в требуемом транспортном положении. Груз не перекашивается и не раскачивается. Транспортировка груза является безопасной. При достижении требуемого этажа подъемник останавливается. Командой с пульта управления включаются электровинтовые устройства 8, балка 7 с захватами груза 9 опускается вертикально вниз до момента опирания груза на лестничную площадку. После чего груз отсоединяют от захватов груза 9. Далее командой с пульта управления переводят подъемник в состояние ожидания с поднятыми захватами груза или осуществляют очередную погрузку, или направляют подъемник для загрузки на другой этаж.
Изготовление подъемника возможно силами машиностроительного предприятия. В качестве электровинтовых устройств может быть применены покупные изделия - актуаторы. Программируемые электронные блоки с набором функций, необходимых для управления работой предлагаемого подъемника, имеются на рынке средств автоматики.
Применение предлагаемого подъемника будет иметь определенный технико-экономический эффект, связанный с сокращением количества случаев повреждения транспортируемых грузов и травматизма пользователей и других лиц, использующих лестничные помещения зданий по прямому назначению.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНИК | 2004 |
|
RU2271329C1 |
| ПОДВЕСНОЙ ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2011 |
|
RU2468946C2 |
| Строительный подъемник | 1971 |
|
SU450763A1 |
| ПОДЪЕМНИК ДЛЯ ПРЯМОЛИНЕЙНЫХ ЛЕСТНИЧНЫХ МАРШЕЙ | 2012 |
|
RU2509711C2 |
| Машина самоходная гусеничная малогабаритная для подъема и установки бордюрного камня. | 2022 |
|
RU2785102C1 |
| КАРЕТКА ЛЕСТНИЧНОГО ПОДВЕСНОГО ПОДЪЕМНИКА (ВАРИАНТЫ) | 2022 |
|
RU2791350C1 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2019 |
|
RU2703812C1 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2011 |
|
RU2462408C1 |
| КАРЕТКА ЛЕСТНИЧНОГО ПОДВЕСНОГО ПОДЪЕМНИКА | 2014 |
|
RU2564943C1 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2015 |
|
RU2587118C1 |
Подъемник относится к грузоподъемному оборудованию лестничных помещений жилых и других зданий. Он содержит неподвижную направляющую, смонтированную на ней каретку с ведущим колесом, контактирующим с направляющей, привод вращения ведущего колеса, шарнирно соединенное с кареткой подвесное устройство с захватами груза, привод подъема и опускания захватов груза и электронный блок управления. Подвесное устройство содержит шарнирно соединенные три стержня и балку, образующие вместе с кареткой два смежных контура треугольной формы. Привод подъема и опускания захватов груза выполнен в виде электровинтовых устройств, смонтированных на каждом стержне подвесного устройства и обеспечивающих возможность изменения длины стержней и их ограниченного поворота в вертикальной плоскости. Электронный блок выполнен с возможностью управления вышеуказанными устройствами таким образом, что сохраняется постоянным угол наклона балки и захватов груза к вертикали. Исключаются перекосы груза и его раскачивание. Имеется возможность подъема захватов груза к направляющей. Обеспечивается безопасность эксплуатации подъемника. 2 ил.
Подъемник, содержащий неподвижно укрепленную направляющую, смонтированную на ней каретку, имеющую ведущее колесо, взаимодействующее с направляющей так, что при своем вращении оно создает тяговое усилие вдоль направляющей, привод вращения ведущего колеса, шарнирно соединенное с кареткой подвесное устройство, захваты груза, привод подъема и опускания захватов груза, электронный блок с пультом управления вышеуказанными приводами, отличающийся тем, что подвесное устройство содержит три стержня и балку, расположенные в вертикальной плоскости, шарнирное соединение подвесного устройства с кареткой выполнено верхними окончаниями стержней в двух разнесенных по горизонтали точках, нижними окончаниями стержни шарнирно соединены с балкой так, что они образуют вместе с кареткой и балкой два смежных контура треугольной формы, причем захваты груза неподвижно укреплены на балке, привод подъема и опускания захватов груза выполнен в виде электровинтовых устройств, смонтированных на каждом стержне так, что они обеспечивают возможность изменения длины стержней и их ограниченного поворота в вертикальной плоскости, а электронный блок способен управлять в автоматическом режиме работой вышеуказанных приводов так, что при подъеме, опускании захватов груза и транспортировании обеспечивается постоянная величина угла наклона балки к вертикали.
| DE 3636440 C1, 15.10.1987 | |||
| Способ получения кетобутанола | 1950 |
|
SU88061A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАДИИ ЗЛОКАЧЕСТВЕННОГО ЗАБОЛЕВАНИЯ ПО СТАБИЛЬНЫМ ЦИТОГЕНЕТИЧЕСКИМ НАРУШЕНИЯМ В ЛИМФОЦИТАХ ПЕРИФЕРИЧЕСКОЙ КРОВИ У БОЛЬНЫХ С СОЛИДНЫМИ ОПУХОЛЕВЫМИ ЗАБОЛЕВАНИЯМИ | 2009 |
|
RU2431145C2 |
| Клещевой захват для удержания и перемещения материала | 1982 |
|
SU1013047A1 |
| ПОДЪЕМНИК | 2004 |
|
RU2271328C1 |

