1
Изобретение относится к области подъемно-транспортного машиностроения и может быть применено в строительстве.
Известны двухстоечные строительные подъемники, оборудованные для удобства
загрузки и выгрузки специальным подъемным устройством. Устройство выполнено в виде П-образной рамы, концы стоек которой шарнирно закреплены на ползунах,, перемещающихся в вертикальных направляющи рамы грузовой площадки, а средние точки шарнирно связаны с поворотными рычагами, хвостовое плечо которых представляетсобой зубчатый сектор, принудительно вращаемый через червячный редуктор электродвигателем. К поперечине рамы прикреплена I червячная лебедка, к барабану которой подвешена траверса с грузозахватным приспособлением. При вращении рычагов notiepe; чина перемещается поперек грузовой пло- щадки, на обе стороны ее, оставаясь на постоянном уровне от пола площадки.
Для увеличения обслуживаемой площади предлагается устройство, которое снабжено установленными на каретках ползунами, несущими отклоняющие блоки, а траверса со единена с кривошипами с возмо(жностьк) осевого поворота.
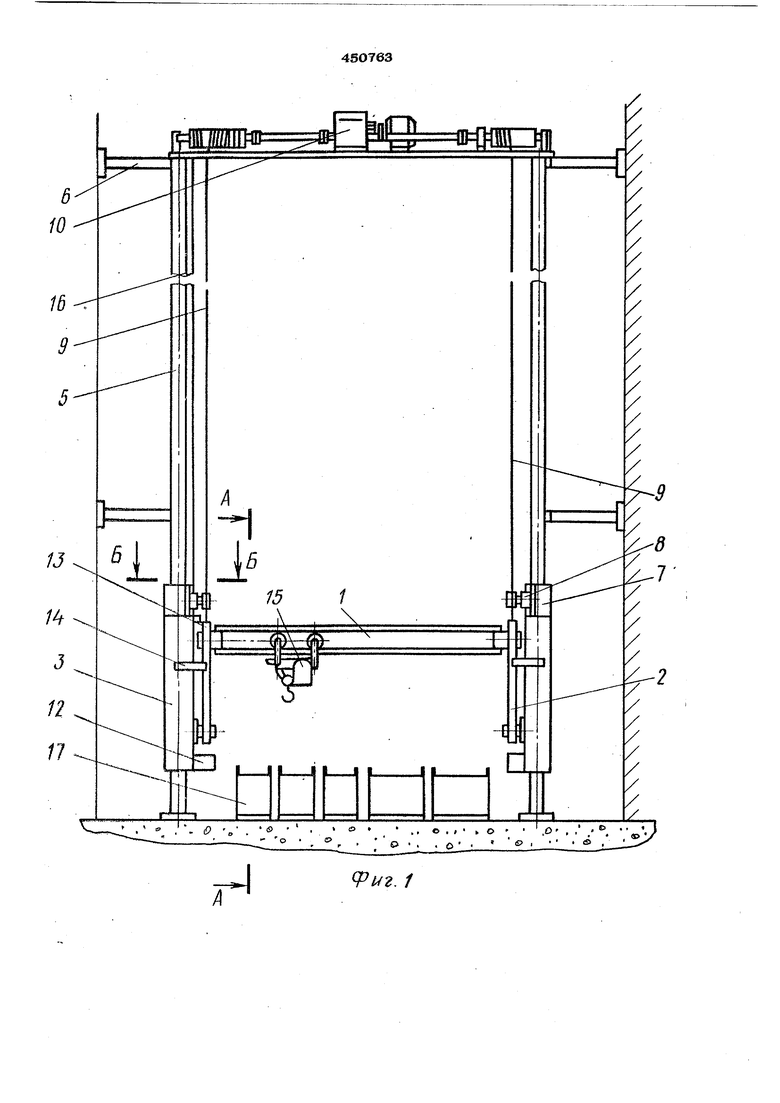
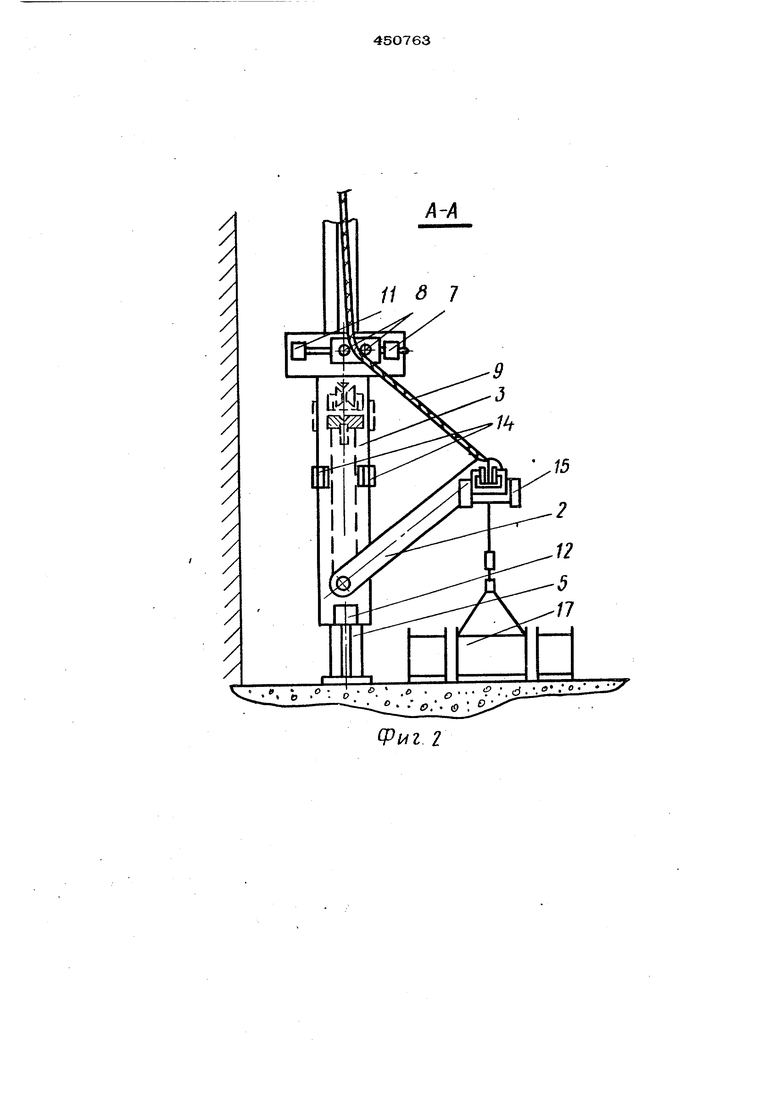
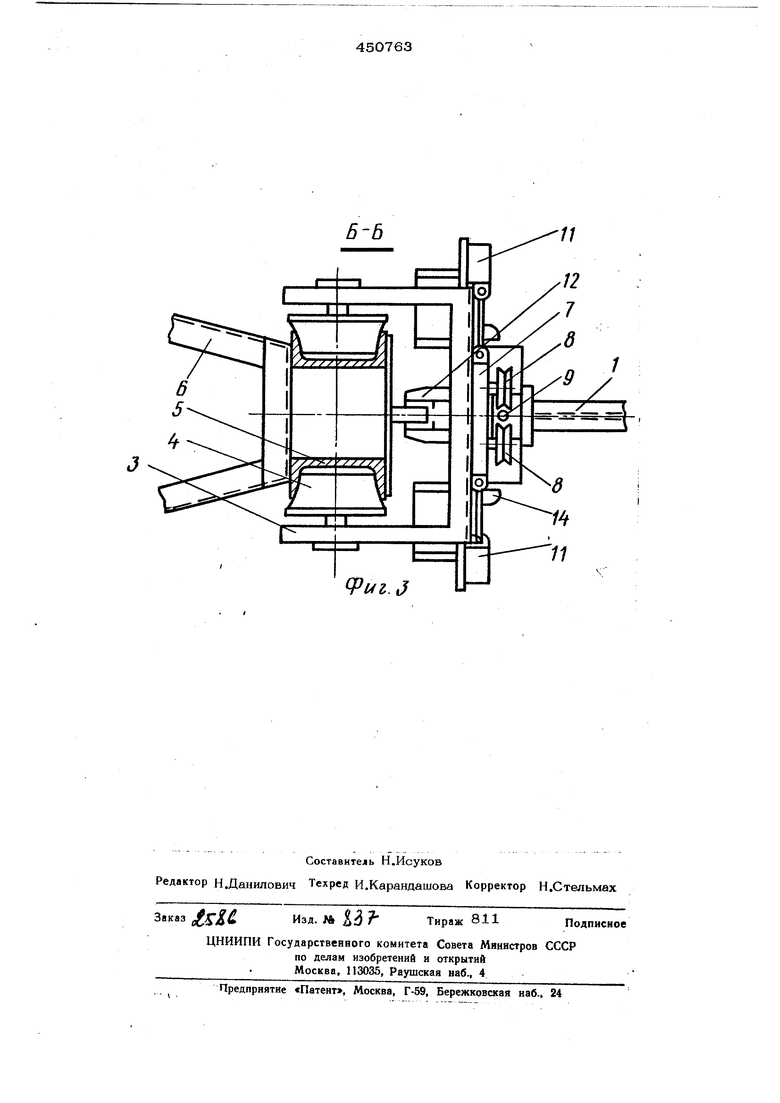
На фиг. 1 изображено предлагаемое устройство, вид спереди; на фиг. 2 - разрез по А-А на фиг. 1; на фиг. 3 - разрез по Р-Б на фиг. 1. .
Устройство включает траверсу 1, свободно вращающуюся в подшипниках, смонтированных на концах кривошипов 2, другие концы которых шарнирно . закреплены к нижним концам кареток 3. Карзетки 3 снабжены расположенными в два яруса опорными колесами 4, обхватывающими вертика/шные направляющие, расположенные на стойках 5. Стойки 5 выполнены из отдельных, наращиваемых по мере необходимости, секций, изготовленных, например, из швеллеров и , укрепляемых к зданию, например,/ кронщтейнами 6. На перемещающихся горизонтально по верхним концам кареток 3 ползунах 7 установлены отклон5пощие блоки 8, между которыми проходят тяговые канаты 9
Канаты 9 прикрешипотся к верхней кривошипов 2, проходят между отклоняюшими блоками 8 н наматываются на бара механизма 1О подъема.
Механизм 1О подъема может быть выполнен, например, в виде двух однобарабанных фрикционных лебедок с общим двухскоростным приводом и установлен на смонтированных, например наверху стоек 5, специальных площадках. Горизонтальное перемещение ползунов 7 с .отклоншсшими блоками 8 по кареткам 3 возможно, например, при помощи длинноходовых электромагнитов 11, установленных с обеих сторон каждого из ползунов и шарнирно с лими связанных.
Каждая из кареток 3 снабжена нормально- замкнутым тормозом 12, выполненным в виде клещевого захвата с клиновым ползуном, на который воздействуют пружина, создающая замыкающее усилие, и электромагнит, обеспечивающий растормажи ание. Тормоза 12 предназначены для удержания кареток 3 в требуемом месте при погрузке и вьшрузке грузов.Управлние растормаживающими электромагнитами тормозов 12 для обеспечения перемещения подъемника осуществляется конечным переключателем 13, установленным на одной из кареток 3. Для удержания кривошипов 2 в вертикальном положении во время перемещения подъемника и в). крайних его положениях на каждой из кареток 3 установлено по два фиксатора 14 выполненных в виде подпружиненной щеколды, один конец которой шарнирно связан с электроманитом, а другой конец, имеющий скос, соприкасается с верхней , частью кривощипов 2. По траверсе 1, имеющей возможность поворота в подшип; никах кривошишов 2 и выполненной, например, из двутавровой балки, перемещается тельфер 15, снабженный необходимым грузозахватным приспособлением. Применение тельфера 15 позволяет расширить .зону действия подъемника.
Токоподвод к магнитам нормально замкнутых тормозов 12 и фиксаторов 14 к конечному выключателю 13 и тельферу 15 осуществляется через кабель 16, наматываемый или сматываемый со специального участка одного из барабанов механизма Ю подъемника.
Длина части кабеля 16 (между барабаном и точкой закрепления на подъемнике) несколько больше длины канатов на соответствующем участке. Перемещение подъемника между этажами происхо; дит на маршевой скорости. Управление подъемом автоматическое с кнопочным пуском и остановкой конечными выключателями на. требуемом этаже. 3 РУзка и . | выгрузка грузов 17 осуществляется на установочной скорости, меньщей скорости подъема. Процесс загрузки н выгрузки может управляться либо с кнопочнънс станций, ; находящихся на каждом этаже, либо с пуль-; та оператора,
Пре/у1агаемый подъемник работает следующи образом.i
В начальный момент подъемник находится ни первом этаже. Каретки 3 заторможены тормозами 12, а кривошипы 2 удерживаются канатами 9 и фиксаторами 14 в вертикальном положении (см. фиг. 2, пунктир). Груз 17 складирован, например, с правой стороны подъемника. Для загрузки подъемника оператор нажимает на пульте управления кнопку вправо вниз , включая привод механйзмй подъёма подъемника на
опускание с установочной скоростью. Одновременно с этим включаются электромагниту 11 ползунов 7 и расфиксируются фиксаторы 14, расположенные на правой стороне подъемника. В результате ползуны 7 б закрепленными на них отклоняющими блоками 8 перемещаются по кареткам 3 вправо, отклоняя в ту же сторону прослабляемые канаты 9 и кривошипы с траверсой 1. Траверса 1 с установленным на ней тельферюм .
15 под действием собственного веса при дальнейшем прослаблении канатов 9 поворачивается вправо от вертикальной оси подъемника. Электромагниты 11 ползунов 7 и электронить i фиксаторов 14 выключаются.
Тельфер 15, установленный на вращающейся траверсе 1 при повороте кривошипов 2 не меняет своего положения в вертикальной плоскости.
Когда траверса 1 с тельфером 15 окажется над грузом 17, оператор ргключает привод механизма 10 подъемника. Затем, в случае необходимости, он включает привод механизма перемещения тельфера по траверсе 1 и опускает крюк тельфера, снабженного соответствующим грузозахватным приспособлением, например стропами. Захватив груз 17, включают механизм подъема тельфера и поднимают груз 17 к траверсе 1 для обеспечения безопасного поворота кривошипов 2 с грузом 17 в вертикальное положение.
Оператор, нажав кнопку требуемого этажа, включает привод механизма 1О подъема подъемника на подъем с установочной скоростью. Канаты 9 выбираются и поворачивают кривошипы 2 и траверсу 1 с тельфером 15, на крюке которого подвешен груз 17, в вертикальное положение. В вертикальном положении кривощипы 2 фиксируются фиксаторами 14. Скос на конце подпружиненной щеколды фиксатора 14 обеспечивает СБободное прохождение кривошипов 2 в вертикальное положение. При этом срабатывает конечный переключа- тель 13, тормоза 12 растормаживаются, привод механизма подъема переключается на маршевую скорость и подъемник поднимается. Дойдя до требуемого этажа, привод механизма 10 подъема выключается, а каретки 3 затормаживаются тормозами 12. Затем привод механизма 1О подьемни:; ка включается на опускание, ползуны 7 с отклоняющими блоками 8 перемещаются электромагнитами 11 в ту сторону, на ко торую необходимо выгрузить груз 171 шеколды фиксаторов 14, установленных с этой стороны, втягиваются магнитами, обеспечивая проход кривощипов 2 подъемника, В результате кривощипы 2, на тра- верее 1 которых находится тельфер 15 с грузом 17, начинают поворачиваться иа : вертикального в горизонтальное положение. Меняя угол поворота кривошипа 2 относительно вертикальной оси и перемещая . тельфер 15 по траверсе 1, можно уложить груз 17 в требуемом месте зонъ обслуживания подъемника. .
Уложив груз 17 и освободив; его от грузозахватных приспособлений, поднимают крюк тельфера 15 и включают привод механизма 1О на подъем.
Канаты 9 выбираются, поворачивая кривошипы 2 в вертикальное положение, В вертикальном положений кривошипы фикси-
руются фиксаторами 14 и воздействуют на конечный переключатель 13, рбеспечиваю.щий растормаживание нормально замкнутых тормозов 12.
После этого подъемник может быть либо опушен, цябо направлен на верхние этажи для загрузки. Фиксаторы 14, удерживающие кривошипы 2 в вертикальном положении, обеспечивают безопасность обслуживания при обрыве канатов 9,
В случае обрыва канатов 9 произойдет и обрыв кабеля 16,
При этом магниты нормально замкнутых тормозов 12 обесточатся и, остановят подъемник,
Предлагаем1)}й подъемник прост в изготовлении и монтаже, надежен в эксплуатации, обеспечивает загрузку и выгрузку груза на обе стороны без применения спе-
плального оборудования.
Предмет изобретения
Строительный подъемник, включающий смонтированные на, вертикальных стойках каретки, к каждой из которых прикреплен соединенный с траверсой кривошип с запасованными через отклоняющие блоки кареток тяговыми канатами, о т л и ч а и и с я тем, что, с целью увеличения обслуживаемой площади, он снабжен установленными на каретках ползунами, несущими отклоняющие блоки, а траверса соеди аена с кривошипами с возможностью осевого поворота.
А-А
(Риг 2
Б-Ь
.J
| название | год | авторы | номер документа |
|---|---|---|---|
| ЙСЕСОЮЗНАЯ ЗаявительКавказский филиал Центрального научно-исследовательскогЬ^'' р., ' ^ ' __ ^' и проектно-конструкторского института механизации и энерreiyjtH _'51 "^'"^'^^^^^'•'^ ^ лесной промышленности-—~—— | 1973 |
|
SU391955A1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| Устройство для загрузки и разгрузки подвесок конвейера | 1979 |
|
SU861234A1 |
| Устройство для шаговых перемещений груза | 1989 |
|
SU1698155A1 |
| ШАХТНЫЙ ТЕЛЬФЕР | 1995 |
|
RU2076211C1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО | 2017 |
|
RU2655967C1 |
| Строительный подъемник | 1978 |
|
SU740677A1 |
| Подъемник | 1983 |
|
SU1146273A1 |
| Траверса | 1985 |
|
SU1284932A1 |
| Мобильный козловой кран | 2018 |
|
RU2706773C1 |