Предлагаемые изобретения относятся к области приборостроения, измерительной и информационной техники, точнее к оптико-электронному обнаружению движущихся объектов.
Известен способ видеонаблюдения с использованием домашнего видеомагнитофона [см. заявку на патент (РФ) №2006114896, кл. H04N 5/765 от 20.11.2007 г., Бюл. 32], включающий видеокамеру наблюдения (видеоглазок), устройство, определяющее период записи сигнала на магнитофон (детектор движения) и устройство сопряжения видеомагнитофона и детектора движения, вместо контроллера механического нажатия кнопок «Start» или «Stop» пульта дистанционного управления предлагается использовать триггерное устройство сопряжения видеомагнитофона и детектора движения, замыкающее на время около 1с клеммы записи или отмены записи видеомагнитофона «Rec» или «Stop» соответственно и тем самым включающее запись на период записи или отключающее ее.
Недостатками данного способа являются относительная сложность и недостаточная информативность видеонаблюдения.
Известно устройство видеонаблюдения, содержащее первичный импульсный преобразователь, цифро-аналоговый преобразователь, усилитель мощности, электрический привод (см., например, Высокоскоростные купольные камеры. - ИТ портал techlabs. by, 2009 г.).
Недостатками данного устройства являются сложность и недостаточная информативность видеонаблюдения при круговом обзоре.
За прототип приняты способ и устройство оптико-электронного кругового обзора (см. патент №2321016 (РФ), кл. G01S 3/78, 2008 г., БИ №9, ч.4), организующие прием ИК-излучения, прием лазерного излучения и формирование информационного сигнала. Прием ИК-излучения выполнен с возможностью вращения в азимутальной плоскости приводом с датчиком угла и состоит из трех идентичных измерительных ИК-каналов, каждый из которых имеет объектив, плоское зеркало, фотоприемное устройство и блок обработки сигнала. Оси указанных объективов равномерно развернуты в азимутальной плоскости и наклонены к ней по вертикали под различными углами. Прием лазерного излучения выполнен панорамным, фотоприем организован в виде секторно-кольцевой многоплощадочной структуры и формирователь сигнала наличия лазерного излучения и его направления в азимутальной плоскости.
Недостатками прототипов являются избыточная сложность и недостаточная информативность видеонаблюдения.
Технической задачей способа и устройства оптико-электронного кругового обзора является упрощение и повышение информативности видеонаблюдения.
Поставленная техническая задача достигается тем, что:
1. В способе оптико-электронного кругового обзора, включающем прием ИК- и оптического излучения с возможностью вращения в азимутальной плоскости по многофазному углу поворота, формирование сигнала наличия излучения и его направления в азимутальной плоскости, в отличие от прототипа, оптическое излучение изображения регистрируют видеосъемкой синхронно с приемом ИК-излучения, размещаемого на объекте видеосъемки за счет сканирования в азимутальной плоскости соответствующего угла поворота фазы тактовыми импульсами фиксированной частоты.
2. В способе по п.1, в отличие от прототипа, сканирование угла поворота фазы преобразуют в код пропорционально тактовым импульсам от начала регистрации реверсивного приращения фазы до его обнуления за счет измерения кода Nj, последовательным приближением с нормированным значением N0j по условию: если измеряемый код Nj больше нормируемого N0j, последний увеличивают суммированием импульсов, в противном случае - их вычитанием, при тождественности кодов Nj=N0j число импульсов не изменяют, а нормируемый код принимают за измеренный.
3. В устройстве оптико-электронного кругового обзора, содержащем блоки приема ИК- и оптического излучения с возможностью вращения в азимуталь ной плоскости приводом с датчиком угла поворота фазы в виде секторно-кольцевой многофазной структуры и формирователем сигнала наличия излучения и его направления в азимутальной плоскости, в отличие от прототипа, приемником оптического излучения служит видеокамера, водруженная на сканер блока приема ИК-излучения, организующего вращение в азимутальной плоскости приводом с ИК-датчиком угла поворота фазы, расположенным соосно между подвижной и неподвижной секторно-кольцевыми структурами сканера.
4. В устройстве по п.3., в отличие от прототипа, приемником ИК- излучения служит фотодиодная матрица, включенная по схеме многофазного мостового коммутатора, состоящего из параллельного соединения двух делителей напряжения, организованных из последовательного включения резистора и фазных фотодиодов матрицы, причем входная диагональ многофазного мостового коммутатора служит для подключения источника энергии, а его выходная диагональ нагружена на исполнительный механизм привода сканера устройства.
5. В устройстве по п.3, в отличие от прототипа, формирователь сигнала наличия излучения и его направления в азимутальной плоскости выполнен на ИК-светодиоде с автономным источником питания в форме декоративного исполнения, например значка, размещаемого на объекте съемки.
Сущность способа и устройства поясняется фиг.1-4 на уровне временных диаграмм фиг.1 и погрешности фиг.2, кинематических фиг.3 и структурной фиг.4 схем.
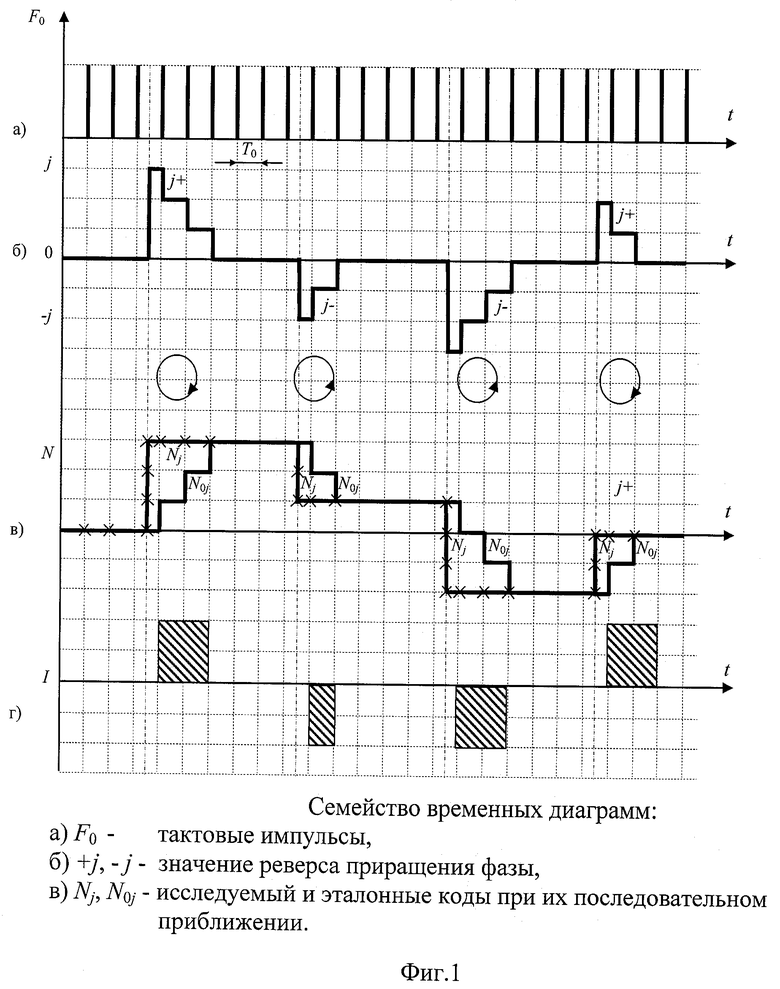
Предлагаемый способ (фиг.1) оптико-электронного кругового обзора включает прием ИК и оптического излучения с возможностью вращения видеокамеры в азимутальной плоскости по многофазному углу φ поворота видеоизображения. Оптическое излучение изображения регистрируют видеосъемкой. Вращение на угол φ осуществляется синхронно с приемом ИК-излучения детектором движения на i сегментов,  , нормированных по фазе φ0=π/m угла поворота, т.е. φ=iφ0 (см. фиг.3, в). Детектор движения регистрирует излучение от ИК-генератора D размещаемого на объекте видеосъемки. Вращение организуют приводом с ИК-детектором движения в азимутальной плоскости пропорционально углу поворота фазы φ тактовыми импульсами частоты F0 (фиг.1,а).
, нормированных по фазе φ0=π/m угла поворота, т.е. φ=iφ0 (см. фиг.3, в). Детектор движения регистрирует излучение от ИК-генератора D размещаемого на объекте видеосъемки. Вращение организуют приводом с ИК-детектором движения в азимутальной плоскости пропорционально углу поворота фазы φ тактовыми импульсами частоты F0 (фиг.1,а).
Частота F0 определяется минимальным кодом N0=1 за период Т0:
F0≥N0/T0=1/0,1=10 Гц
Сканирование угла поворота фазы φi преобразуют в код N пропорционально тактовым импульсам частотой F0 за интервал времени τj (см. фиг.1). Это соответствует времени от начала регистрации реверсивного приращения фазы Δφj до его обнуления последовательным приближением нормированного значения N0j к измеряемому значению Nj по условию

Если измеряемый код Nj больше нормируемого N0j, то его увеличивают суммированием импульсов N0j=N0j+ΔNj. Когда Nj меньше нормы N0j, последний уменьшают вычитанием импульсов N0j=N0j-ΔNj. При тождественности кодов Nj=N0j число импульсов не изменяют, а нормированный код принимают за измеренный. Алгоритм последовательного приближения соответствует алгебраическому суммированию реверсивных приращений ΔNj=Nj-N0.
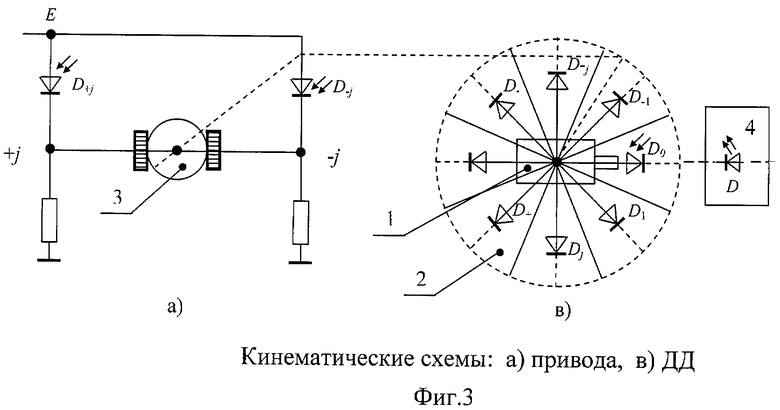
Предлагаемый способ реализует устройство оптико-электронного кругового обзора (см. фиг.3) с использованием видеокамеры (1), включающей видеомагнитофон, ИК-детектор движения (2) объекта и привод (3). Видеокамера 1 водружена на сканер (см. фиг.3, в) ИК-детектора движения 2, организующего вращение в азимутальной плоскости от генератора сигнала наличия излучения и его направления (ИК-генератора излучения). Генератор выполнен на ИК-светодиоде D с автономным источником питания в декоративном исполнении, например в форме значка (пуговицы, брелка и т.д.), размещаемого на объекте 4 видеосъемки. Вращение сканера детектора движения 2 осуществляют приводом 3 угла поворота фазы φ, который расположен соосно с ИК-детектором движения 2 и видеокамерой 1. Привод 3 с детектором движения 2 размещены между подвижной и неподвижной секторно-кольцевыми структурами сканера. При этом исполнительный механизм привода 3 закреплен на неподвижном кольце сканера в центре секторно-кольцевой структуры для организации вращения в азимутальной плоскости подвижной секторно-кольцевой структуры, по периметру кольца которой в секторах расположены приемники ИК-излучения Dj, D-j детектора движения 2 (см. фиг.3, в).
Приемником ИК детектора движения 2 служит фотодиодная матрица, включенная по схеме многофазного мостового коммутатора (фиг.3, а), состоящего из параллельного соединения двух делителей напряжения. Делители организованы из последовательного включения резистора и фазных фотодиодов Dj, D-j матрицы. Входная диагональ многофазного мостового коммутатора служит для подключения источника энергии Е. Выходная диагональ коммутатора (см. фиг.3, а) нагружена на исполнительный механизм привода 3 сканера устройства.
В исходном состоянии (см. фиг.3, в) объектив камеры 1 расположен по оси, перпендикулярной объекту 4 за счет приема ИК-излучения детектором движения 2 от ИК-светодиода D, закрепленного на объекте 4 видеонаблюдения. При перемещении объекта 4 вправо (или влево) на угол φ=iφ0 в детекторе движения 2 формируется код N, пропорциональный i-му сектору многофазного угла φ. В выходной диагонали мостового коммутатора ток течет (фиг.3, г) через исполнительный механизм привода 3 в прямом или инверсном включении в зависимости от освещенных диодов Dj, D-j детектора движения 2. Исполнительный механизм привода 3 поворачивает на угол φ сканер за счет последовательного включения i сегментов методом последовательного приближения. В результате сканирования на угол φ объектив камеры 1 вновь расположен на оси, перпендикулярной объекту 4 видеосъемки. При дальнейшем перемещении объекта 4 структурная схема привода 3 с ИК-детектором движения 2 функционирует аналогично, фиксируя в коде N многофазный угол поворота φ.
Сканирование угла поворота фазы φi преобразуют в код N пропорционально тактовым импульсам частотой F0 за интервал времени τj (см. фиг.1). Это соответствует времени от начала регистрации реверсивного приращения фазы Δφj (фиг.1, б) до его обнуления. Алгоритм последовательного приближения соответствует алгебраическому суммированию реверсивных приращений ΔNj=Nj-N0j фазы Δφj, регистрируемых в виде разницы ΔNj между измеряемым Nj и нормированным N0j значениями. Сумма реверсных значений в соответствии с алгоритмом 1,а может быть представлена как

Учитывая, что код N=F0t, т.е. произведение тактовой частоты F0 на время t, связанными с фиксированными интервалами T0 числом j импульсов, находим для последовательного приближения (фиг.1) ΔNj=N0.
Соответственно сумма приращений равна

т.е. пропорциональна числу i импульсов. Графики на фиг.1, б, в иллюстрируют изменение кода на интервалах tj приращения 
 ;
;
и реверса с 3 до -2, для  :
:
 ,
,
и  , причем итоговая сумма N-2 равна их разнице
, причем итоговая сумма N-2 равна их разнице
 .
.
Максимальный код Nm определяется суммой - m i-тых сегментов  кольцевого сканера с круговым углом φ2π=2π=360° обзора
кольцевого сканера с круговым углом φ2π=2π=360° обзора

из m многофазных углов поворота с нормированной фазой φ0=φ2π/2m=φπ/m.
Кольцо кругового сканера (см. фиг.3, в) разделено пополам на фазы сегментов φ правого φ+ и левого φ- поворота с возможностью вращения видеокамеры 1 в азимутальной плоскости по i-фазному углу поворота φ=iφ0 видеоизображения, поэтому коды N и Nm пропорциональны числу сегментов фаз, соответственно i и m:
Из этих соотношений следуют зависимости N(φ) и N(i):

показывающие прямую зависимость кода N от угла поворота (фазы) φ и числа i сегментов.
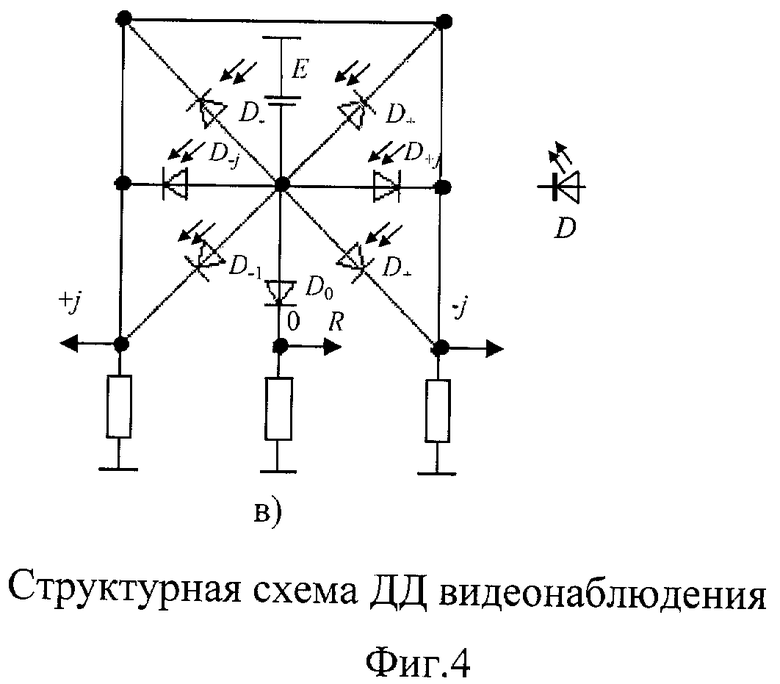
Структурная схема детектора движения (ДД) 2 (Фиг.4) поясняет способ видеонаблюдения. ДД 2 многофазного угла φ поворота содержит приемник излучения из ИК-фото диодной матрицы с 2m+1 фотодиодами Dj и D-j,  . Диоды Dj организуют правый поворот, D-j - левый, a D0 фиксирует установившееся значение, принимаемое за нулевое. При этом в азимутальной плоскости угол поворота фазы равен нулю φ=iφ0=φ0, a ось вращения через фотодиод D0 соосна с окуляром видеокамеры 1. Соответственно ось перпендикулярна ИК-светодиоду D, закрепленному на объекте 4, а также наблюдаемому объекту 4 видеосъемки. Поэтому выход ИК-фотодиода D0 связан через дополнительное сопротивление R в диагональ питания с нулевым входом детектора 2. Выходная диагональ мостового коммутатора организована плечами суммы «+» и вычитания «-», объединенными каждый с m фотодиодами Dj и D-j ИК-матрицы детектора движения 2 для регистрации многофазных углов φ правого или левого поворота объекта 4 видеосъемки.
. Диоды Dj организуют правый поворот, D-j - левый, a D0 фиксирует установившееся значение, принимаемое за нулевое. При этом в азимутальной плоскости угол поворота фазы равен нулю φ=iφ0=φ0, a ось вращения через фотодиод D0 соосна с окуляром видеокамеры 1. Соответственно ось перпендикулярна ИК-светодиоду D, закрепленному на объекте 4, а также наблюдаемому объекту 4 видеосъемки. Поэтому выход ИК-фотодиода D0 связан через дополнительное сопротивление R в диагональ питания с нулевым входом детектора 2. Выходная диагональ мостового коммутатора организована плечами суммы «+» и вычитания «-», объединенными каждый с m фотодиодами Dj и D-j ИК-матрицы детектора движения 2 для регистрации многофазных углов φ правого или левого поворота объекта 4 видеосъемки.
В исходном состоянии (см. фиг.3, б, в) объект 4 находится перпендикулярно оси видеосъемки видеокамеры 1, при этом в выходной диагонали коммутатора детектора движения 2 ток отсутствует (фиг.3, г), т.к. от излучателя ИК-светодиода D, расположенного на объекте 4 видеонаблюдения, лучи воздействуют на нулевой D0 фотодиод. В исходном состоянии код N детектора 2 равен нулю. При повороте объекта 4 вправо, например на 3 сегмента угла поворота φ=3φ0, код N=3N0, а нормированный код N0j=0N0 (см. фиг.3, в). Лучи от светодиода D объекта 4 регистрируются D3 фотодиодом, что увеличивает суммарный код детектора 2 в течение j тактов импульсами F0. За счет последовательного приближения нормируемого кода N0j к текущему Nj сканер (см. фиг.3, в) вращается вправо от j=3-го сегмента к нулевому (см. фиг.3, б), а код детектора 2 увеличивается
 .
.
Когда нулевой сегмент с фотодиодом Do окажется в азимутальной плоскости на оси, перпендикулярной ИК-светодиоду D объекта 4, детектор 2 привода 3 отключается, а объект 4 видеосъемки вновь оказывается перед объективом видеокамеры 1 на оси, перпендикулярной видеосъемке. Аналогично детектор движения 2 отслеживает левый поворот за счет включения D-j фотодиодов, что соответствует уменьшению кода в детекторе 2 импульсами частоты F0. Следовательно, ДД 2 регистрирует код N, пропорциональный интегралу (1) приращений ΔNj кода, соответствующих линейному преобразованию фазы φ=iφ0 (или числу i-сегментов) в код по характеристикам (5).
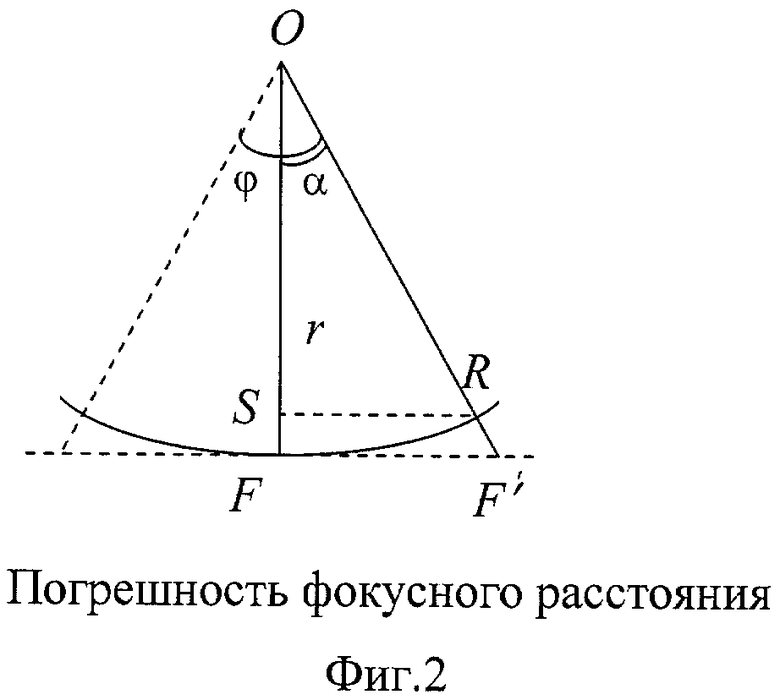
Оценим предлагаемое решение в сравнении с прототипом по метрологической эффективности, а именно точности (четкости) изображения объекта видеосъемки, которое определяется погрешностью фокусного расстояния (см. фиг.3).
Фокусное расстояние от центра О объектива до объекта F равно кратчайшему расстоянию OF окружности радиусом r для объекта, находящегося в фокусе видеосъемки. При перемещении объекта вправо (или влево), т.е. по касательной к фокусному расстоянию r, его радиус увеличивается до окружности с радиусом R - отрезок OF′. Погрешность ε изменения фокусного расстояния определяется относительным изменением радиусов Δ=r-R к нормированному фокусу r исходной окружности
 .
.
Отношение R/r радиусов окружностей несложно найти из соотношения сторон подобных треугольников FOF′ и SOR с равным углом α, соответствующим половине фазы φ/2 угла φ поворота в азимутальной плоскости перемещения объекта видеонаблюдения:
 ,
,
т.к. катет OS прямоугольного треугольника SOR находится из определения cosα=OS/r, a OS/r=r/R следует из подобия треугольников. За нормированную фазу φ0 целесообразно принять угол поворота с погрешностью фокусного расстояния, например 1%, т.е. ε=0,01 или φ0=φ(0,01). Нормированную фазу φ0 также можно определить из половины окружности с углом φm=π=180° и максимального числа m сегментов i
φ0=π/2m.
Для многофазного угла поворота φ=i·φ0 из i сегментов, где  , погрешность фокусного расстояния оценивается зависимостью
, погрешность фокусного расстояния оценивается зависимостью
ε=1-1/cos(iπ/2m).
Оценка погрешности ε(φ) с нормированной фазой φ0/2=8° и максимумом m=11 сегментов сведена в таблицу для  числа сегментов.
числа сегментов.
Нижняя строка таблицы отражает погрешность εr фокусировки при перемещении объекта по кругу с радиусом r фокусного расстояния, которой соответствует оценка
εr=1-cos(iπ/2m).
Погрешности ε и εr совпадают при небольших (стандартных) углах  и расходятся при широкофокусных углах поворота, при этом погрешность εr приближается к 1 (100%) для
и расходятся при широкофокусных углах поворота, при этом погрешность εr приближается к 1 (100%) для  , а погрешность ε при увеличении или уменьшении радиуса r фокуса объекта в k-раз превышает 1 и изменяется в диапазоне 1,28-27,7 для сегментов
, а погрешность ε при увеличении или уменьшении радиуса r фокуса объекта в k-раз превышает 1 и изменяется в диапазоне 1,28-27,7 для сегментов  .
.
Таким образом, предлагаемые способ и устройство оптико-электронного кругового обзора, в отличие от известных решений, за счет автоматизации вращения угла поворота позволяют расширить видеонаблюдение до кругового панорамного обзора с регламентируемой точностью нормируемой меры, например, с погрешностью 1% для видеообъектива с углом 16°, что на два порядка повышает точность видеонаблюдения или метрологическую эффективность видеосъемки. Предлагаемые способ и устройство расширяют возможности бытовой видеотехники до профессионального уровня за счет внедрения измерительной и информационной техники в оптико-электронное приборостроение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ВИДЕОНАБЛЮДЕНИЯ | 2009 |
|
RU2436255C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОКРУЖНОГО ПРОФИЛЯ ОТНОСИТЕЛЬНОЙ КОНЦЕНТРАЦИИ ЖИДКОЙ ФАЗЫ В РАСПЫЛЯЕМОЙ ДИСПЕРСНОЙ СРЕДЕ С ИСПОЛЬЗОВАНИЕМ ПЛОСКОСТНОЙ ЛАЗЕРНО-ИНДУЦИРОВАННОЙ ФЛУОРЕСЦЕНЦИИ | 2020 |
|
RU2753961C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО КРУГОВОГО ОБЗОРА | 2006 |
|
RU2321016C1 |
| МУЛЬТИСПЕКТРАЛЬНАЯ СИСТЕМА И СПОСОБ ОПТИКО-ЭЛЕКТРОННОГО НАБЛЮДЕНИЯ ОХРАНЯЕМОЙ ТЕРРИТОРИИ | 2014 |
|
RU2563557C2 |
| ПОВОРОТНОЕ УСТРОЙСТВО С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2008 |
|
RU2396731C1 |
| СПОСОБ КАРТОГРАФИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2014 |
|
RU2559203C1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2528109C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО КОНТРОЛЯ АТМОСФЕРЫ | 2002 |
|
RU2226269C2 |
| УСТРОЙСТВО СКАНИРОВАНИЯ И СЛЕЖЕНИЯ | 2017 |
|
RU2645733C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И РЕГИСТРАЦИИ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА И СПОСОБ ОПРЕДЕЛЕНИЯ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ | 2011 |
|
RU2486467C1 |
Изобретение относится к оптико-электронному обнаружению движущихся объектов. Достигаемый технический результат - повышение метрологической эффективности за счет автоматизации кругового панорамного видеонаблюдения с регламентированной точностью нормируемой меры фазы угла поворота в азимутальной плоскости. Указанный результат достигается тем, что в способе оптико-электронного кругового обзора, включающем прием ИК- и оптического излучения с возможностью вращения в азимутальной плоскости по многофазному углу поворота, формирование сигнала наличия излучения и его направления в азимутальной плоскости, оптическое излучение изображения регистрируют видеосъемкой синхронно с приемом ИК-излучения, размещаемого на объекте видеосъемки за счет сканирования в азимутальной плоскости соответствующего угла поворота фазы тактовыми импульсами фиксированной частоты. Сканирование угла поворота фазы преобразуют в код пропорционально тактовым импульсам от начала регистрации реверсивного приращения фазы до его обнуления за счет измерения кода Nj последовательным приближением с нормированным значением N0j по условию: если измеряемый код Nj больше нормируемого N0j, последний увеличивают суммированием импульсов, в противном случае - их вычитанием, при тождественности кодов Nj=N0j число импульсов не изменяют, а нормируемый код принимают за измеренный. В устройстве оптико-электронного кругового обзора, содержащем блоки приема ИК- и оптического излучения с возможностью вращения в азимутальной плоскости приводом с датчиком угла поворота фазы в виде секторно-кольцевой многофазной структуры и формирователем сигнала наличия излучения и его направления в азимутальной плоскости. Приемником оптического излучения служит видеокамера, установленная на сканер блока приема ИК-излучения, организующего вращение в азимутальной плоскости приводом с ИК-датчиком угла поворота фазы, расположенным соосно между подвижной и неподвижной секторно-кольцевыми структурами сканера. Приемником ИК-излучения служит фотодиодная матрица, включенная по схеме многофазного мостового коммутатора, состоящего из параллельного соединения двух делителей напряжения, организованных из последовательного включения резистора и фазных фотодиодов матрицы, причем входная диагональ многофазного мостового коммутатора служит для подключения источника энергии, а его выходная диагональ нагружена на исполнительный механизм привода сканера устройства, формирователь сигнала наличия излучения и его направления в азимутальной плоскости выполнен на ИК-светодиоде с автономным источником питания в форме декоративного исполнения, например значка, размещаемого на объекте съемки. 2 н. и 3 з.п. ф-лы, 4 ил.
1. Способ оптико-электронного кругового обзора, включающий прием ИК- и оптического излучения с возможностью вращения в азимутальной плоскости по многофазному углу поворота, формирование сигнала наличия излучения и его направления в азимутальной плоскости, отличающийся тем, что оптическое излучение изображения регистрируют видеосъемкой синхронно с приемом ИК-излучения, размещаемого на объекте видеосъемки за счет сканирования в азимутальной плоскости соответствующего угла поворота фазы тактовыми импульсами фиксированной частоты.
2. Способ по п.1, отличающийся тем, что сканирование угла поворота фазы преобразуют в код пропорционально тактовым импульсам от начала регистрации реверсивного приращения фазы до его обнуления за счет измерения кода Nj последовательным приближением с нормированным значением N0j по условию, если измеряемый код Nj больше нормируемого N0j, то последний увеличивают суммированием импульсов, в противном случае - их вычитанием, при тождественности кодов Nj=N0j число импульсов не изменяют, а нормируемый код принимают за измеренный.
3. Устройство оптико-электронного кругового обзора, содержащее блоки приема ИК- и оптического излучения с возможностью вращения в азимутальной плоскости приводом с датчиком угла поворота фазы в виде секторно-кольцевой многофазной структуры и формирователем сигнала наличия излучения и его направления в азимутальной плоскости, отличающееся тем, что приемником оптического излучения служит видеокамера, водруженная на сканер блока приема ИК-излучения, организующего вращение в азимутальной плоскости приводом с ИК-датчиком угла поворота фазы, расположенным соосно между подвижной и неподвижной секторно-кольцевыми структурами сканера.
4. Устройство по п.3, отличающееся тем, что приемником ИК-излучения служит фотодиодная матрица, включенная по схеме многофазного мостового коммутатора, состоящего из параллельного соединения двух делителей напряжения, организованных из последовательного включения резистора и фазных фотодиодов матрицы, причем входная диагональ многофазного мостового коммутатора служит для подключения источника энергии, а его выходная диагональ нагружена на исполнительный механизм привода сканера устройства.
5. Устройство по п.3, отличающееся тем, что формирователь сигнала наличия излучения и его направления в азимутальной плоскости выполнен на ИК-светодиоде с автономным источником питания в форме декоративного исполнения, например значка, размещаемого на объекте съемки.
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО КРУГОВОГО ОБЗОРА | 2006 |
|
RU2321016C1 |
| Устройство для кругового обзора | 1990 |
|
SU1770746A1 |
| ОПТИКО-ПЕЛЕНГАЦИОННАЯ СИСТЕМА КРУГОВОГО ОБЗОРА | 2007 |
|
RU2356063C1 |
| Устройство для передачи на расстояние показаний измерительных приборов | 1947 |
|
SU88814A1 |
| US 6031605 A, 29.02.2000 | |||
| Устройство для контроля знаний | 1989 |
|
SU1679519A1 |
| WO 2007132033 A1, 22.11.2007 | |||
| US 4275399 A, 23.06.1981. | |||

