Изобретение относится к области радиолокации, в частности к радиолокационным станциям, устанавливаемым на летательных аппаратах.
Известен способ картографирования земной поверхности [«Многофункциональные радиолокационные системы» под ред. Б.Г. Татарского, М. Дрофа, 2007 г. стр. 24, 25, 174-195], основанный на излучении и приеме антенной отраженных от земной поверхности сигналов при перемещении (сканировании) луча антенны в заданном секторе углов по азимуту, синтезировании апертуры антенны и формировании радиолокационного изображения поверхности Земли. Синтезирование апертуры антенны позволяет искусственно более чем на порядок обострить луч, используя зависимость доплеровского смещения частоты отраженного сигнала от углового положения отражающего элемента поверхности, что обеспечивает разделение целей, находящихся внутри луча. Однако синтезирование апертуры антенны в зоне углов порядка ±10° в горизонтальной плоскости (по азимуту) относительно строительной оси (курса) летательного аппарата представляет большие сложности ввиду незначительной разницы в передней зоне доплеровского смещения частоты отраженного сигнала. Этот недостаток не позволяет произвести картографирование земной поверхности с высоким разрешением в указанной зоне обзора, что, в свою очередь, не дает возможности использовать вооружение летательного аппарата при работе по объектам, расположенным в «слепой зоне» по его курсу.
Наиболее близким по технической сущности является «Способ картографирования земной поверхности бортовой радиолокационной станцией», описанный в [RU 2423724 опубликовано 10.07.2011, МПК G01S 13/89 (2006.01)]. Способ основан на излучении и приеме антенной отраженных от земной поверхности сигналов при перемещении луча антенны в заданном секторе по азимуту, синтезировании апертуры антенны и формировании радиолокационного изображения. При этом перемещение луча антенны от границы заданного сектора углов по азимуту осуществляется при изменении курса летательного аппарата от начального значения Ф0 с соблюдением условия |Фтек-φтек|≥φ, где Фтек и φтек - текущие значения курса летательного аппарата и луча антенны соответственно, φ - минимальное значение отклонения луча антенны от курса летательного аппарата, необходимое для синтезирования апертуры антенны. При достижении углового положения луча антенны ≥Ф0 осуществляется его мгновенный переброс в азимутальной плоскости до другой границы заданного сектора, после чего продолжается перемещение луча антенны по азимуту в противоположном направлении с изменением курса летательного аппарата до исходного значения Ф0 при соблюдении условия |Фтек-φтек|≥φ.
В этом способе за счет маневра летательного аппарата типа «змейка» обеспечивается синтезирование апертуры антенны в передней зоне обзора, что позволяет получить высокую разрешающую способность при картографировании земной поверхности в этой зоне. Однако такой подход в случае непрерывного картографирования земной поверхности (получении нескольких кадров карты подряд) приведет к изменению траекторного курса летательного аппарата (ЛА). Это потребует от летчика постоянного контроля курса, что приведет к потере времени на его коррекцию. В противном случае это приведет к смещению заданной зоны картографирования относительно курса ЛА, а в конечном итоге к срыву поставленной задачи по применению вооружения при работе по объектам, расположенным по курсу ЛА.
Техническим результатом предлагаемого способа является стабилизация положения зоны картографирования по курсу летательного аппарата. Это достигается контролем траекторного курса летательного аппарата при картографировании земной поверхности.
Сущность изобретения состоит в том, что способ картографирования земной поверхности БРЛС основан на излучении и приеме антенной отраженных от земной поверхности сигналов при перемещении луча антенны в заданном секторе углов по азимуту, синтезировании апертуры антенны и формировании покадрового радиолокационного изображения поверхности Земли. При формировании каждого кадра карты перемещение луча антенны от границы заданного сектора углов по азимуту осуществляется при изменении курса летательного аппарата от начального значения Ф0 с соблюдением условия |Фтек-φтек|≥φ, где Фтек и φтек - текущие значения курса летательного аппарата и луча антенны соответственно, φ - минимальное значение отклонения луча антенны от курса летательного аппарата, необходимое для синтезирования апертуры антенны. При достижении углового положения луча антенны ≥Ф0 осуществляется его мгновенный переброс в азимутальной плоскости до другой границы заданного сектора, после чего продолжается перемещение луча антенны по азимуту в противоположном направлении с изменением курса летательного аппарата до исходного значения Ф0 при соблюдении условия |Фтек-φтек|≥φ.
Новым признаком заявляемого способа является то, что граница, с которой начинает формироваться каждый последующий кадр, меняется на противоположную, причем переброс луча антенны при формировании кадров карты, начинающихся с левой границы заданного сектора углов, осуществляется при достижении лучом антенны значения угла Φ0+φ, а при формировании кадров начинающихся с правой границы - при достижении лучом антенны значения угла Φ0-φ.
На фиг. 1 представлена радиолокационная станция для осуществления способа.
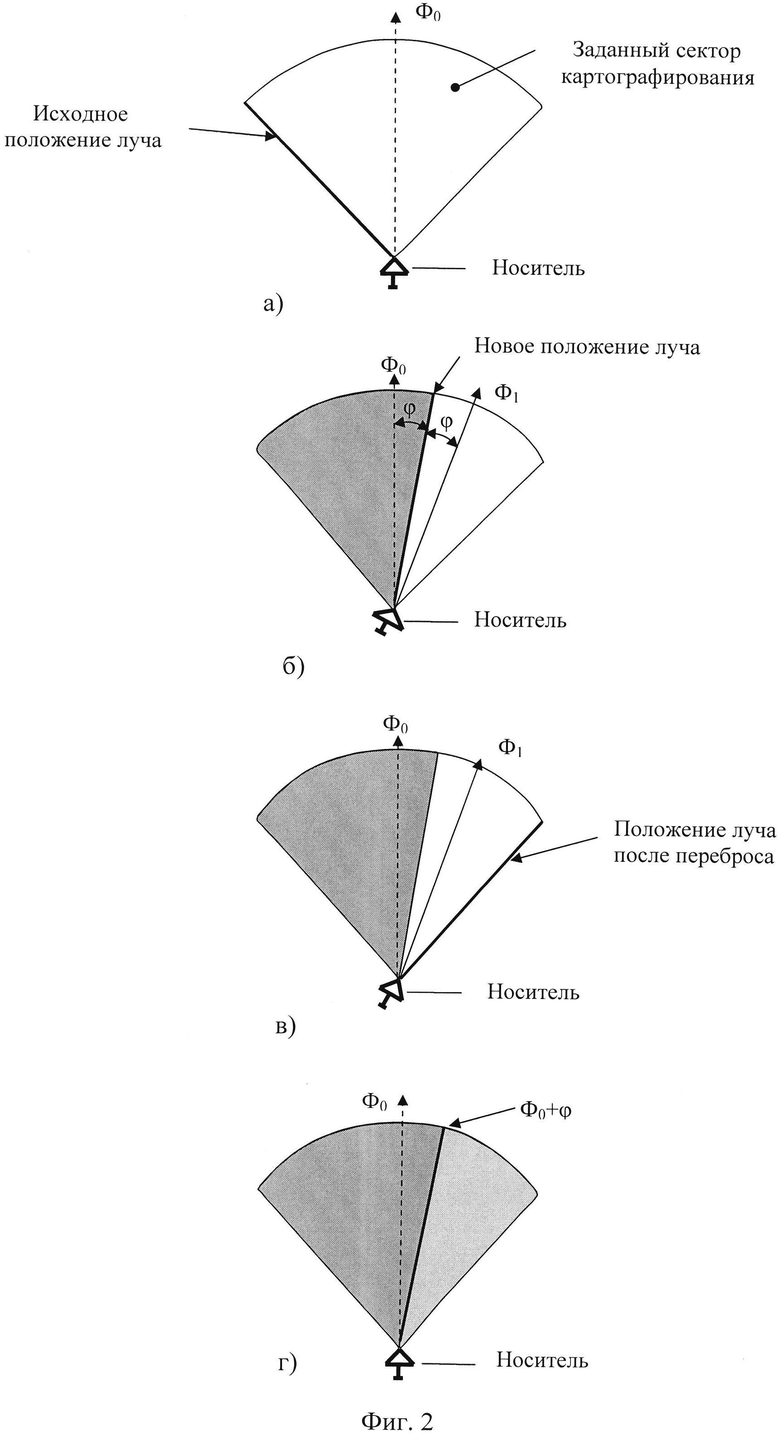
На фиг. 2 показаны процессы построения нечетного кадра карты при перемещении луча антенны и изменении курса ЛА:
где а) заданный сектор картографирования с начальным значением курса ЛА Ф0 и начальным положением луча антенны, соответствующим границе заданного сектора картографирования;
б) часть карты, построенная при перемещении луча антенны до значения Φ0+φ и изменении курса ЛА до значения Φ1=Φ0+2φ (φ - минимальное значение угла отклонения луча антенны от курса летательного аппарата, при котором обеспечивается синтезирование апертуры антенны);
в) часть карты и положение луча антенны после переброса до другой границы заданного сектора картографирования;
г) карта, построенная во всем заданном секторе картографирования, при изменении курса ЛА и перемещении луча антенны.
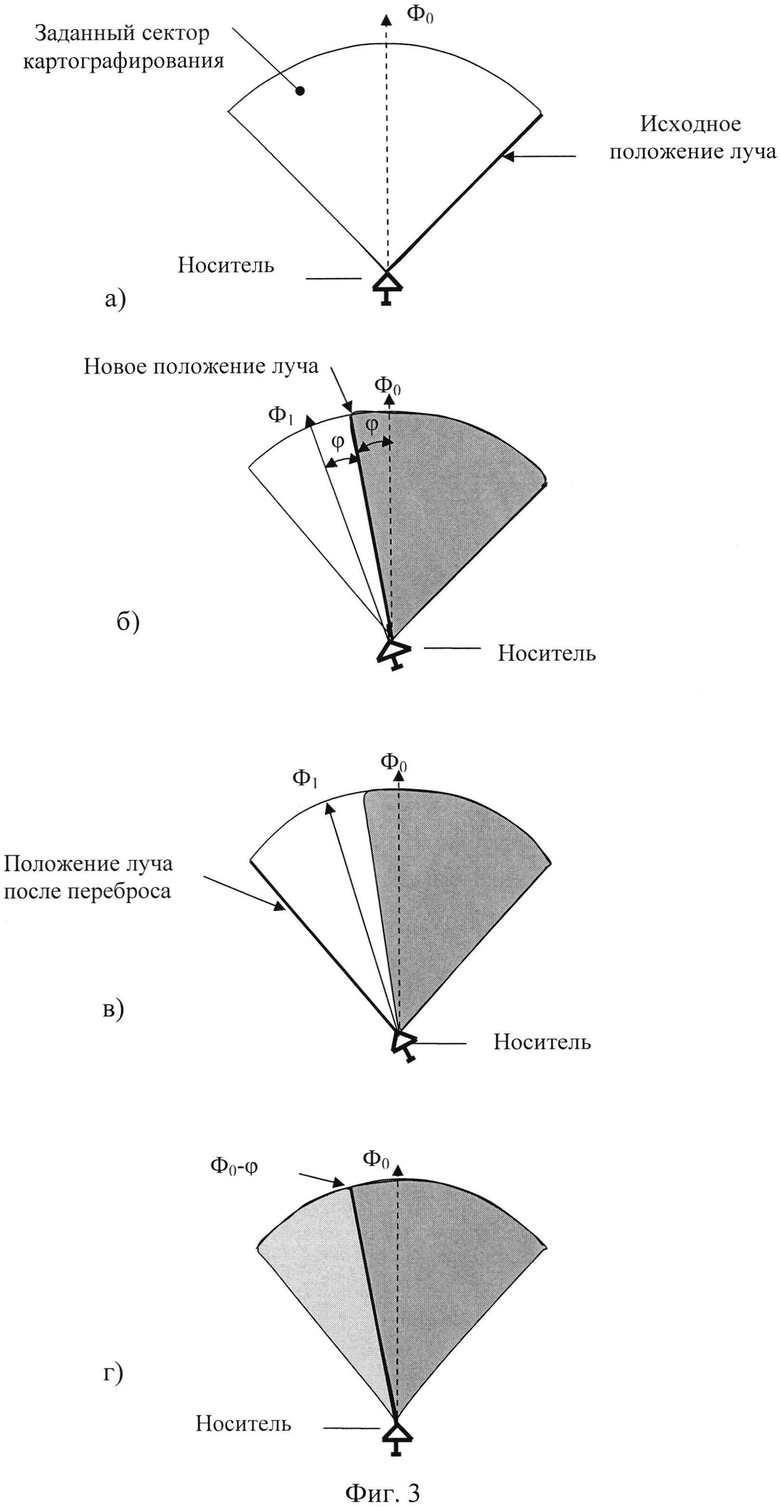
На фиг. 3 показаны процессы построения четного кадра карты при перемещении луча антенны и изменении курса ЛА:
где а) заданный сектор картографирования с начальным значением курса ЛА Ф0 и начальным положением луча антенны, соответствующим границе заданного сектора картографирования;
б) часть карты, построенная при перемещении луча антенны до значения Ф0-φ и изменении курса ЛА до значения Φ1=Φ0-2φ;
в) часть карты и положение луча антенны после переброса до другой границы заданного сектора картографирования;
г) карта, построенная во всем заданном секторе картографирования, при изменении курса ЛА и перемещении луча антенны.
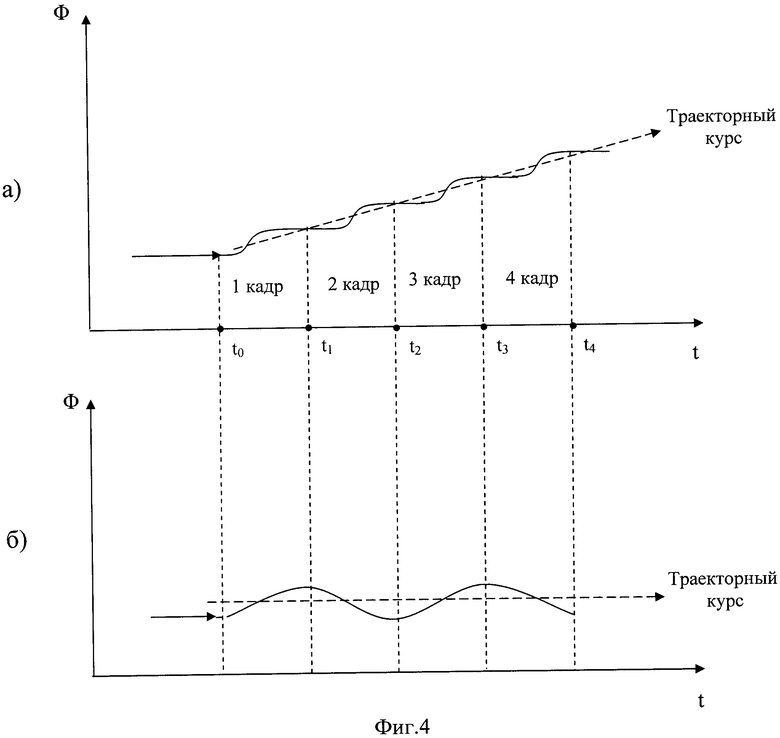
На фиг. 4 показаны траектории полета ЛА при картографировании:
- по способу, описанному в прототипе (фиг. 4а);
- по предлагаемому способу (фиг. 4б), где
Φ - курс ЛА;
t0-t1 - временной интервал построения первого кадра карты;
t1-t2 - временной интервал построения второго кадра карты и т.д.
Способ картографирования земной поверхности может быть реализован при работе радиолокационной станции, состоящей из бортовой цифровой вычислительной машины (БЦВМ) 1, блока управления лучом (БУЛ) 2, антенны 3, передатчика 4, приемника 5, блока формирования радиолокационного изображения земной поверхности 6, индикатора 7. Первый выход БЦВМ 1 соединен с входом БУЛ 2, а второй выход - с входом передатчика 4, выход которого соединен со вторым входом антенны 3. Первый вход антенны 3 соединен с выходом БУЛ 2, причем выход антенны 3 подключен к входу приемника 5, выход которого соединен с входом блока формирования радиолокационного изображения земной поверхности 6, выход которого соединен с входом индикатора 7. Третий выход БЦВМ 1 является внешним выходом БРЛС и подключается к входу пилотажно-навигационного комплекса (ПНК) летательного аппарата.
Антенна 3 излучает в пространство импульсы сигнала, поступающие на ее второй вход с выхода передатчика 4, по командам, поступающим на его вход со второго выхода БЦВМ 1. При перемещении луча антенны 3 по командам управления, поступающим на ее первый вход с блока управления лучом 2, управляемым с первого выхода БЦВМ 1, производится облучение земной поверхности. Отраженные от земной поверхности сигналы принимаются антенной 3. С выхода антенны 3 сигналы поступают на вход приемника 5. С выхода приемника 5 сигналы поступают в блок формирования радиолокационного изображения земной поверхности 6, а с его выхода - на вход индикатора 7.
Режим картографирования включается подачей на БЦВМ 1 команды «Карта» из кабины летательного аппарата. При наличии этой команды в БЦВМ 1 производится расчет начального положения луча антенны для формирования нечетных и четных кадров карты, которое определяется заданным сектором углов картографирования. При формировании нечетных кадров он устанавливается на границу (например, левую) заданного сектора углов по азимуту (фиг. 2а), а при формировании четных кадров карты он устанавливается на правую границу зоны обзора (фиг. 3а). Рассчитанные в БЦВМ 1 координаты положения луча антенны передаются с ее первого выхода на БУЛ 2, в котором вырабатываются соответствующие команды управления лучом антенны 3. После начальной установки луча антенны 3 начинается его перемещение в азимутальной плоскости с одновременным изменением курса летательного аппарата от начального значения Ф0 при выполнении условия |Φтек-φтек|≥φ, где Фтек и φтек - текущие значения курса летательного аппарата и луча антенны соответственно, φ - минимальное значение отклонения луча антенны от курса летательного аппарата, необходимое для синтезирования апертуры антенны. Требуемая скорость перемещения луча антенны 3 определяется командами управления, поступающими с первого выхода БЦВМ 1 на вход БУЛ 2, а управление курсом летательного аппарата осуществляется сигналами, поступающими с третьего выхода БЦВМ 1 на вход пилотажно-навигационного комплекса (ПНК) летательного аппарата. При достижении углового положения луча антенны значения Φ0+φ (при формировании нечетных кадров) и Φ0-φ (при формировании четных кадров), а курса летательного аппарата значений Φ1=Φ0+2φ и Φ1=Φ0-2φ (фиг. 2б и фиг. 3б) осуществляется мгновенный переброс луча в азимутальной плоскости до другой границы заданного сектора (фиг. 2в и фиг. 3в). После этого продолжается перемещение луча антенны по азимуту в противоположном направлении с изменением курса летательного аппарата до исходного значения Ф0 при соблюдении условия |Фтек-φтек|≥φ. При достижении курса летательного аппарата значения Ф0 луч антенны достигает значения Φ0+φ при формировании нечетных кадров (фиг. 2г), либо Φ0-φ при формировании четных кадров фиг. 3г, при котором процесс картографирования заканчивается. Как видно из фиг. 2 и фиг. 3, за счет изменения курса в процессе перемещения луча антенны при формировании нечетных и четных кадров карты обеспечивается условие, при котором положение луча антенны отличается от текущего курса на величину φ, т.е. выполняется условие |Фтек-φтек|≥φ, позволяющее обеспечить синтезирование апертуры антенны.
В приемнике 5 осуществляется синтезирование апертуры антенны, основанное на использовании различия доплеровского смещения сигналов, отраженных от земной поверхности в пределах главного луча антенны 3. С выхода приемника 5 сигналы через блок формирования радиолокационного изображения земной поверхности 6 поступают на индикатор 7, где осуществляется отображение карты поверхности Земли в заданном секторе углов по азимуту.
Поскольку в процессе картографирования каждый нечетный кадр начинает формироваться от левой границы заданного сектора картографирования, а каждый четный кадр - от правой границы заданного сектора картографирования, то достигается стабилизация положения зоны картографирования, путем контроля курса ЛА (фиг. 4б), в отличие от прототипа (фиг. 4а), что является техническим результатом изобретения.
Предлагаемый режим картографирования целесообразно реализовывать, используя режим автоматического управления летательным аппаратом с помощью системы автоматического управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАРТОГРАФИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2009 |
|
RU2423724C1 |
| СПОСОБ КАРТОГРАФИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ (БРЛС) | 2013 |
|
RU2529523C1 |
| Способ картографирования земной поверхности бортовой радиолокационной станцией в переднем секторе обзора | 2017 |
|
RU2640406C1 |
| Способ локации целей в передних зонах обзора бортовых радиолокационных станций двухпозиционной радиолокационной системы | 2019 |
|
RU2703996C2 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ БОРТОВОЙ РЛС, УСТАНОВЛЕННОЙ НА ДВИЖУЩЕМСЯ ЛЕТАТЕЛЬНОМ АППАРАТЕ | 2013 |
|
RU2528169C1 |
| Способ картографирования земной поверхности бортовой радиолокационной станцией | 2016 |
|
RU2626012C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ Ku-ДИАПАЗОНА | 2021 |
|
RU2787574C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2007 |
|
RU2364887C2 |
| СПОСОБ КОМАНДНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ | 2009 |
|
RU2408846C1 |
| Способ формирования изображения поверхности в бортовой радиолокационной станции с синтезированием апертуры антенны с электронным управлением лучом | 2016 |
|
RU2617116C1 |
Изобретение относится к области радиолокации, в частности к радиолокационным станциям, устанавливаемым на летательных аппаратах. Достигаемый технический результат - стабилизация положения зоны картографирования по курсу летательного аппарата. Способ картографирования земной поверхности бортовой радиолокационной станцией основан на излучении и приеме антенной отраженных от земной поверхности сигналов при перемещении луча антенны в заданном секторе углов по азимуту, синтезировании апертуры антенны и формировании покадрового радиолокационного изображения поверхности Земли, причем перемещение луча антенны от границы заданного сектора углов по азимуту осуществляется при изменении курса летательного аппарата, а граница, с которой начинает формироваться каждый последующий кадр, меняется на противоположную. Способ может быть реализован радиолокационной станцией, состоящей из бортовой цифровой вычислительной машины, блока управления лучом, антенны, передатчика, приемника, блока формирования радиолокационного изображения земной поверхности, индикатора. 4 ил.
Способ картографирования земной поверхности бортовой радиолокационной станцией, основанный на излучении и приеме антенной отраженных от земной поверхности сигналов при перемещении луча антенны в заданном секторе углов по азимуту, синтезировании апертуры антенны и формировании покадрового радиолокационного изображения поверхности Земли, причем перемещение луча антенны от границы заданного сектора углов по азимуту осуществляется при изменении курса летательного аппарата от начального значения Φ0 с соблюдением условия |Φтек-φтек|≥φ, где Φтек и φтек - текущие значения курса летательного аппарата и луча антенны соответственно, φ - минимальное значение отклонения луча антенны от курса летательного аппарата, необходимое для синтезирования апертуры антенны, а при достижении углового положения луча антенны ≥Φ0 осуществляется его мгновенный переброс в азимутальной плоскости до другой границы заданного сектора, после чего продолжается перемещение луча антенны по азимуту в противоположном направлении с изменением курса летательного аппарата до исходного значения Φ0 при соблюдении условия |Φтек-φтек|≥φ, отличающийся тем, что граница, с которой начинает формироваться каждый последующий кадр, меняется на противоположную, причем переброс луча антенны при формировании кадров карты, начинающихся с левой границы заданного сектора углов, осуществляется при достижении лучом антенны значения угла Φ0+φ, а при формировании кадров карты, начинающихся с правой границы заданного сектора углов, переброс луча антенны осуществляется при достижении лучом антенны значения угла Φ0-φ.
| СПОСОБ КАРТОГРАФИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2009 |
|
RU2423724C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТОВ | 2007 |
|
RU2347237C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ НА БАЗЕ БОРТОВОГО РАДИОТЕПЛОЛОКАТОРА | 2008 |
|
RU2368918C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ В БОРТОВЫХ СИСТЕМАХ РАДИОВИДЕНИЯ | 2008 |
|
RU2373552C1 |
| US 6563451 B1, 13.05.2003 | |||
| Устройство для укладки досок в пакет | 1989 |
|
SU1728104A1 |
| WO 2007113824 A2, 11.10.2011 | |||
| WO 2005109034 A1, 17.11.2005 | |||

