Область техники, к которой относится изобретение
Настоящее изобретение относится в целом к тепловозному дисплею, а более конкретно - к способу прогнозирования и отображения скорости поезда на трассе.
Уровень техники
Железнодорожные системы рассчитывают и отображают для машиниста поезда в запланированных случаях время до прибытия, важное само по себе или в комбинации с расходом топлива или комфортом поездки, запланированный профиль скоростей поездки. При подготовке профиля скоростей учитывают пределы скоростей и ограничения физического характера маршрута. Примеры данных систем приведены в европейских опубликованных заявках 467,377 А2 и 539,885 А2. Данные предшествующие системы входят в состав систем управления движением поездов (систем управления поездкой), используемых железнодорожными компаниями для контроля движения и эффективности использования топлива поездов.
На длинных перегонах или поездках через обширные территории эффективное управление скоростью поезда может представлять для машиниста большие сложности. Предпочтительно, чтобы машинист самостоятельно управлял регулятором и тормозами. Контроль скорости поезда является важнейшим техническим требованием инженера-тепловозника или машиниста локомотива. Для безопасного движения он должен строго придерживаться расставленных пределов скорости, временных ограничений скорости (предупреждений о снижении скорости) и требований к скорости приближающихся знаков. Он делает это управлением регулятором тепловоза и/или регулировкой ручки реостатного тормоза, а при необходимости - пневматического тормоза.
Все тепловозы оборудованы скоростемером и большинство имеют акселерометр. К сожалению, из-за чрезмерной массы (веса) и длины стандартный поезд реагирует на управляющие действия машиниста с опозданием. Если машинист приводит в действие или отпускает пневматический тормоз, то до полного срабатывания тормозной системы поезда может пройти от одной до двух минут. На скорость поезда также существенно влияет профиль трассы, по которой он проходит. Отображение прогнозированных скоростей в точках маршрута позволит диспетчеру или машинисту тепловоза предвидеть и заранее реагировать на увеличение скоростей поезда на основе текущих настроек тормозов и регулятора.
Сущность изобретения
Данная система обеспечивает способ прогнозирования скорости поезда на трассе, включая: определение местонахождения поезда на трассе, определение скорости поезда и определение текущих настроек тормозов и регулятора. Рекомендованные настройки тормозов и регулятора, необходимые для достижения требуемой скорости поезда, рассчитываются и отображаются для разнесенных точек маршрута. Скорости в разнесенных точках маршрута рассчитываются на основе измерений. Рассчитанные скорости отображаются на разнесенных отметках вдоль изображения трассы. В сущности, система заранее определяет и отображает скорость и требуемые настройки тормозов и регулятора на основе текущих настроек тормозов и регулятора, заданных машинистом. Это рекомендованная система позволяет усовершенствовать управление и принятие решений машинистом для лучшего достижения требуемой скорости поезда. Систему используют во время передвижений поездов на дальние расстояния по обширным территориям.
Кроме того, система может определять и отображать скорости в разнесенных точках, включая рассчитанные скорости, которые превышают пределы скоростей. Скорости, превышающие пределы скоростей, можно отображать в разнесенных точках вдоль изображения трассы иначе, чем скорости, не превышающие пределов скоростей. Если одна или более рассчитанных скоростей превышают пределы скоростей, то система рассчитает и отобразит перед машинистом рекомендованные настройки тормозов и регулятора, которые позволят соблюсти требуемую скорость. Если оператор придержится и выполнит рекомендованные настройки тормозов и регулятора, то рекомендованные настройки больше отображаться не будут. Если после отображения рекомендованных настроек тормозов и регулятора изменения произведены не были, то текущие настройки могут быть автоматически изменены на рекомендованные при включенном автоматическом управлении.
Другие предметы, преимущества и новые признаки настоящего изобретения станут очевидными из нижеследующего подробного описания изобретения при рассмотрении совместно с прилагаемыми чертежами.
Краткое описание чертежей
На фигуре 1 изображен дисплей, содержащий прогнозированную скорость в соответствии с принципами настоящего изобретения.
На фигуре 2 изображена блок-схема для прогнозирования скорости в соответствии с настоящим изобретением.
Подробное описание изобретения
В патенте США 6144901, включенном в настоящее изобретение путем ссылки, описана система LEADER от New York Air Brake, работающая по принципу сохранения кинетической и потенциальной энергии. Математическое моделирование системы LEADER отслеживает параметры и производит вычисления на основе текущего состояния энергии поезда для отображения динамики поезда в реальном масштабе времени. Система LEADER способна предоставлять информацию, позволяющую бригаде лучше управлять поездом, сводя к минимуму потери энергии. Потери энергии из-за неэффективного торможения отражают чрезмерно израсходованное топливо. Энергия, сообщаемая грузу поезда, отражает потенциальный ущерб грузу, подвижному составу и железнодорожному пути. Оба явления нежелательны.
Хотя для выполнения настоящего способа будет использована система LEADER, можно использовать и другие аналогичные системы, которые могут прогнозировать скорость на предстоящем пути на основе текущего состояния поезда.
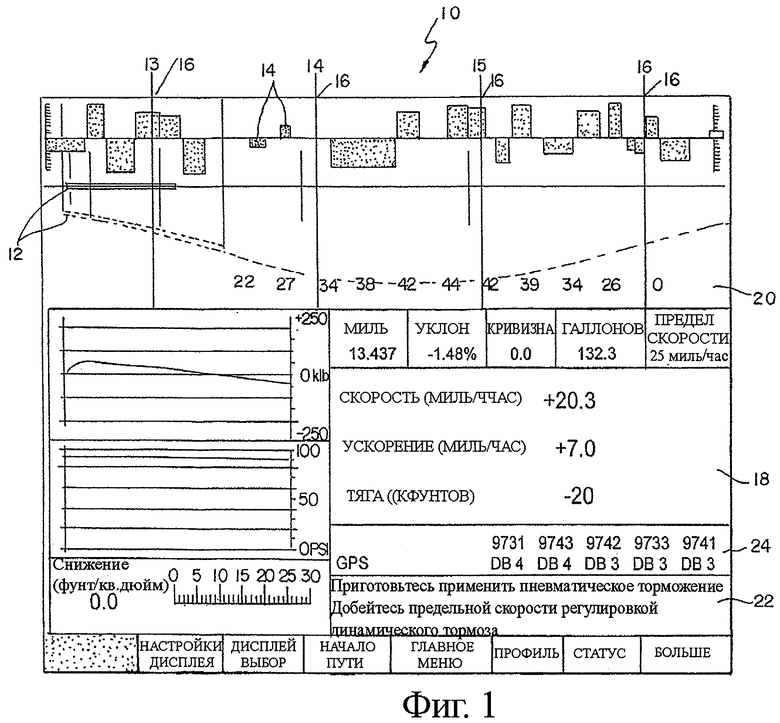
На фигуре 1 изображен дисплей в кабине тепловоза. Подробная информация, соответствующая различным элементам дисплея, приведена со ссылкой на фигуру 5 патента США 6144901. Далее будут описаны подробно только те из них, которые представляют интерес для настоящего изобретения. На трассе 14 изображен поезд 12. На трассе имеется вертикальное и горизонтальное изображение поезда. Изображены указательные столбы 16, пересекающие различные участки трассы. В ячейке 18 представлены текущие скорость, ускорение и силы тяги на сцепном устройстве.
Как будет описано в отношении фигуры 2, настоящая система определяет текущее положение поезда на трассе, скорость поезда и настройки тормозов и регулятора и на основании этого прогнозирует скорость поезда в различных точках маршрута. Это показано на фигуре 1 вдоль ячеек 20 с примером прогнозирования скорости. Одной из особенностей настоящей системы является распознавание пределов скоростей на различных участках трассы и обеспечение индикации превышенной скорости. При использовании, к примеру, предела скорости 25 миль в час все изображенные скорости, кроме первой и последней, превысят данный предел. Данные превышенные скорости могут быть явно выделены. К примеру, прогнозированные скорости, меньшие предельных, могут отображаться желтым цветом, а прогнозированные скорости, большие предельных, - красным. Для привлечения внимания превышенные скорости могут также мигать. На дисплее могут быть изображены точки трассы с интервалом, к примеру, в четверть мили. Можно использовать также другие интервалы.
Настоящая система может также предоставлять машинисту другие сообщения. Информационное окно 22 предоставляет сообщение «приготовьтесь применить пневматическое торможение» и «добейтесь предельной скорости регулировкой DB». DB - реостатный тормоз. В окне 24 показано рекомендованное применение реостатного торможения на определенном участке GPS. Номера DB отражают позицию рычага тяги в области реостатного торможения. Как явствует из изображения трассы, ускорение при текущих настройках регулятора является результатом уклона трассы. Без регулировок пределы скорости будут превышены.
На фигуре 2 изображена блок-схема настоящего способа. На этапе 30 происходит определение скорости поезда, положения на трассе, настроек тормозов и регулятора. На этапе 32 происходит расчет скорости поезда в точках маршрута. На этапе 34 система определяет, превышает ли какая-либо из скоростей в точках маршрута пределов скоростей для данной точки. Если нет, то на этапе 36 происходит отображение рассчитанных скоростей на отметках соответствующих точек маршрута. Если на этапе 34 некоторые скорости превышают предел скорости, то на этапе 38 происходит различительное отображение превышенных и нормальных скоростей.
Кроме того, если имеются скорости, превышающие предел скорости, то на этапе 40 происходит расчет настроек регулятора и/или тормозов для уменьшения скорости в точках вдоль трассы ниже предела скорости. Затем на этапе 42 система может определять, является ли управление поездом автоматическим. При автоматическом управлении система приводит на этапе 44 настройки регулятора и/или тормозов к настройкам, которые уменьшают значения скоростей.
Если на этапе 42 отсутствует автоматическое управление, то на этапе 46 отображаются рассчитанные настройки регулятора и/или тормозов для уменьшения скорости. Затем на этапе 48 происходит анализ ответных действий бригады. При наличии ответных действий процедура повторяется возвратом операции 50 к определению скорости, местоположения и настроек тормозов и регулятора и расчету скоростей поезда на трассе. Если на этапе 48 бригада не произвела ответных действий, то на этапе 52 может произойти автоматическое выполнение команды, выбираемое машинистом поезда. После выполнения команды на этапе 52 процедура повторяется возвратом операции 54 к повторному определению скорости поезда, местоположения и настроек регулятора и тормозов и расчета скоростей поезда в точках маршрута.
Различные отображения рекомендованных настроек регулятора и тормозов, приведенные на фигуре 1, являются лишь примером. Можно использовать другие параметры или формы отображения. К примеру, рекомендованные настройки регулятора и тормозов могут отображаться вместе с рассчитанной скоростью. Кроме того, рекомендованные настройки могут рассчитываться и отображаться даже при отсутствии превышения предела скорости. В качестве другого варианта при отсутствии корректирующего действия может активироваться индикатор предупредительной сигнализации.
Хотя настоящее изобретение подробно описано и проиллюстрировано, следует четко понимать, что оно не ограничивается вышеприведенным описанием. Объем настоящего изобретения может быть ограничен только признаками прилагаемой формулы изобретения.
Изобретение относится к тепловозному дисплею, а более конкретно - к способу прогнозирования и отображения скорости поезда на трассе. Способ заключается в определении местоположения поезда на трассе, текущей скорости поезда и настроек тормозов и регулятора поезда; расчет прогнозируемых скоростей в разнесенных точках вдоль трассы на основе текущей скорости и местоположения поезда. По полученным данным рассчитывают рекомендованные настройки тормозов и регулятора и одновременно отображают в разнесенных точках вдоль трассы. При этом прогнозируемые скорости, превышающие пределы скоростей, отображаются иначе, чем прогнозируемые скорости, не превышающие пределов скоростей. Изобретение позволяет усовершенствовать управление поездом путем обеспечения возможности принятия решений машинистом для достижения оптимальной скорости. 2 н. и 6 з.п. ф-лы, 2 ил.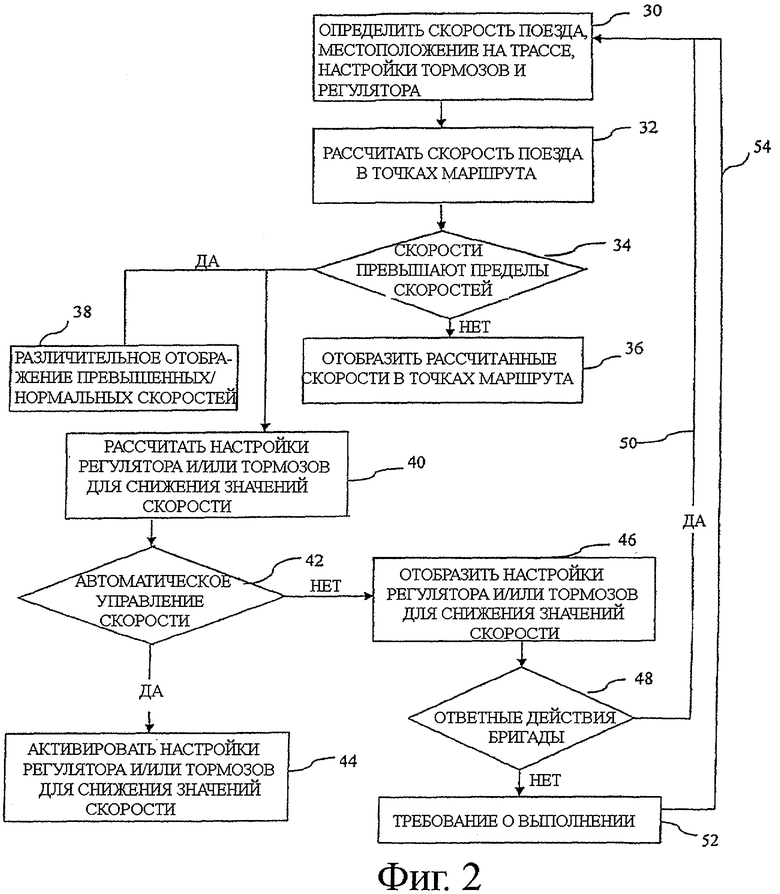
1. Способ прогнозирования скорости поезда на трассе, содержащий: определение местоположения поезда на трассе, текущей скорости поезда и настроек тормозов и регулятора поезда; расчет прогнозируемых скоростей в разнесенных точках вдоль трассы на основе текущей скорости и местоположения поезда; расчет рекомендованных настроек тормозов и регулятора в разнесенных точках вдоль трассы на основе текущего местоположения, скорости поезда, настроек тормозов и регулятора поезда и прогнозируемых скоростей в разнесенных точках; и одновременное отображение пути прогнозируемых скоростей, рекомендованных настроек тормозов и регулятора в разнесенных точках вдоль трассы.
2. Способ по п.1, включающий определение пределов скоростей в разнесенных точках, определение и одновременное отображение прогнозируемых скоростей, которые превышают пределы скоростей.
3. Способ по п.1, при котором настройки тормозов и регулятора охватывают пневматическое торможение, электропневматическое торможение, динамическое торможение и тягу.
4. Способ по п.1, при котором происходит расчет и отображение рекомендованных настроек тормозов и регулятора в разнесенных точках вдоль трассы, если одна или более рассчитанные скорости превышают определенные пределы скоростей в разнесенных точках вдоль трассы.
5. Способ по п.1, включающий определение изменений настроек тормозов и регулятора после отображения рекомендованных настроек и повтор процедуры.
6. Способ по п.1, включающий определение изменений настроек тормозов и регулятора после отображения рекомендованных настроек тормозов и регулятора, и - в случае отсутствия изменений - автоматическое изменение настроек тормозов и регулятора на рекомендованные настройки тормозов и регулятора.
7. Способ прогнозирования скорости поезда на трассе, содержащий: определение местоположения поезда на трассе, текущей скорости поезда и настроек тормозов и регулятора поезда; расчет прогнозируемых скоростей в разнесенных точках вдоль трассы на основе текущей скорости и местоположения поезда; расчет рекомендованных настроек тормозов и регулятора в разнесенных точках вдоль трассы на основе текущего местоположения, скорости поезда, настроек тормозов и регулятора поезда и прогнозируемых скоростей в разнесенных точках; и одновременное отображение пути прогнозируемых скоростей; определение пределов скоростей в разнесенных точках, определение и одновременное отображение прогнозируемых скоростей, которые превышают пределы скоростей, в котором прогнозируемые скорости, превышающие пределы скоростей, отображаются в разнесенных точках вдоль изображения трассы иначе, чем прогнозируемые скорости, отображаемые в разнесенных точках вдоль изображения трассы, не превышающие пределов скоростей.
8. Способ по п.7, при котором прогнозируемые скорости, превышающие пределы скоростей, отображаются красным цветом или мигают.
| СПОСОБЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНЫХ СОСТАВОВ МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ ПО ТРАССЕ И ЕЕ ПЕРЕГОНУ | 2002 |
|
RU2196695C1 |
| УСТРОЙСТВО ЛОКОМОТИВНОЙ ИНДИКАЦИИ | 2004 |
|
RU2265539C2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2002 |
|
RU2272731C2 |

