Предпосылки к созданию изобретения и краткое изложение сущности изобретения
Разработка системы LEADER® компанией New York Air Brake stems с самого начала происходила в области моделирования поведения поездов с целью расследования происшествий и планирования работы. Эта технология была первоначально разработана в качестве офисного приложения, а сегодня преобразована во встроенное приложение для использования на борту поезда. Система LEADER® моделирует весь процесс движения поезда в реальном времени, а примененная в системе технология прогнозирования позволяет предсказать динамику поведения поезда в перспективе. Эту возможность используют для предоставления «подсказок для машиниста» с целью оптимизации управления поездом с точки зрения действующих в поезде усилий, экономии топлива, стандартных технологических режимов и времени до прибытия в пункт назначения. Эти параметры взвешивают в соответствии с требованиями железной дороги клиента. Описание системы LEADER® имеется в патенте США 6587764.
Разработка технологии дистанционного управления локомотивом в начале 1980-х была основана на концепции использования вычислительной мощности бортового компьютера для замены знаний и опыта машиниста, управляющего локомотивом на сортировочной горке и в горизонтальном сортировочном парке. Эта концепция так называемого «машиниста в ящике» была широко принята в железнодорожной отрасли и в правительственных регулирующих органах.
Движение поезда вне сортировочной горки и горизонтального сортировочного парка требует дополнительного опыта для решения задач управления поездом и динамики поезда. Для продолжения использования в разделении труда на железных дорогах система «машинист в ящике» должна быть более сложной и изощренной, чтобы справляться с этими новыми ситуациями.
Значительные моделирующие и вычислительные мощности, разработанные для системы LEADER®, особенно хорошо подходят для решения этой задачи. Система LEADER® способна моделировать работу и динамику поезда в реальном времени и предоставлять машинисту командные подсказки для оптимизации управления поездом. Систему LEADER® можно расширить для введения в нее функции «круиз контроль» (оптимальное автоматическое регулирование скорости), непосредственно сопряженной с системой управления локомотива для управления скоростью поезда. Эту же технологию можно использовать, чтобы освободить оператора дистанционного управления RCO локомотивом от необходимости иметь опыт вождения поездов на территориях со сложным гористым рельефом. Система LEADER® генерирует команды, а система дистанционного управления локомотивом (RCL) исполняет эти команды, так что оператору дистанционного управления (RCO) следует просто указать нужные скорость и пункт остановки поезда.
Критически важным для успешности работы такой системы LEADER® является наличие человеко-машинного интерфейса (ЧМИ (HMI)), позволяющего оператору (RCO) взаимодействовать с системой таким образом, чтобы четко указать его намерения для движения поезда и при этом не отвлекать оператора (RCO) от его основных обязанностей контроля сигналов на перегоне, согласования маршрута и наблюдения за свободой железнодорожных путей.
Устройства управления скоростью поездов с интерфейсом оператора и защитными устройствами описаны в патенте США 4,181,943. Кроме того, индикация тормозного пути для экстренного торможения, для полного служебного торможения или для произвольного торможения описана в патенте США 5744707. Хотя отдельные компоненты и подсистемы уже известны, необходима более полная и комплексная система.
Настоящее описание посвящено контроллеру локомотива, содержащему устройство ввода, дисплей и процессор для управления дисплеем и приема входных сигналов от указанного устройства ввода. Программное обеспечение процессора определяет и управляет представлением на дисплее местонахождения поезда на путях и указанием на путях точки остановки при экстренном торможении, при полном служебном торможении или при управляемом торможении по меньшей мере в одном из режимов.
Контроллер имеет выход, а процессор передает на этот выход команду одного из видов торможения, выбранного в соответствии с входными сигналами от указанного устройства ввода. Процессор может также передать на выход сигнал режима малой скорости, выбираемого входным сигналом малой скорости от указанного устройства ввода. Процессор может определить тормозной путь на основе входного сигнала требуемой скорости от указанного устройства ввода и представить на дисплее введенную величину скорости.
Рассматриваемый процессор может определить и показать на дисплее текущую величину скорости поезда и определяет тормозной путь на основе этой текущей скорости. Процессор определяет тормозной путь на основе входного сигнала максимальной скорости от устройства ввода и показывает эту введенную величину максимальной скорости на дисплее.
Указанный процессор может определить и показать на дисплее отметки точек на путях, где заканчивается тормозной путь, относительно текущего местонахождения поезда для случаев экстренного торможения, полного служебного торможения и управляемого торможения. В альтернативном варианте процессор может определить и показать на дисплее отметки точки остановки поезда относительно введенной точки остановки для случаев экстренного торможения, полного служебного торможения и управляемого торможения.
Рассматриваемый процессор устраняет отметку точки остановки поезда или не показывает эту точку на дисплее, если поезд уже прошел точку указанной отметки на путях.
Указанный контроллер включает в себя органы управления тормозами и регуляторы тяги (тяговое усилие и динамическое торможение) в соответствии с сигналом на указанном выходе контроллера с целью управления тормозами и тягой локомотива. Контроллер может представлять собой портативное устройство дистанционного управления локомотивом (RCL), а указанный выход контроллера связан по радио с органами управления тормозами и регулятором тяги локомотива.
Настоящее описание посвящено также контроллеру локомотива, включающему в себя устройство ввода, выход, дисплей и процессор для приема входных сигналов от указанного устройства ввода, управления дисплеем и передачи выходных сигналов на указанный выход. Программное обеспечение процессора передает на указанный выход сигналы торможения и тяги для реализации режима малой скорости, выбранной входным сигналом малой скорости от указанного устройства ввода.
Эти и другие цели, признаки и преимущества настоящего изобретения могут быть лучше поняты и оценены на основе следующего ниже подробного описания примеров изобретения, выбранных в качестве иллюстрации и показанных на прилагаемых чертежах.
Краткое описание чертежей
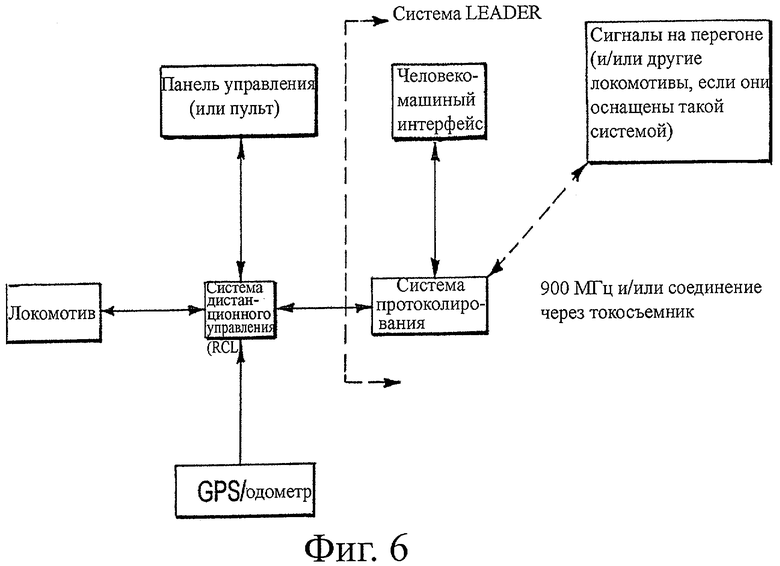
Фигура 1 показывает вид дисплея для индикации тормозного пути согласно настоящему изобретению с органами управления остановкой.
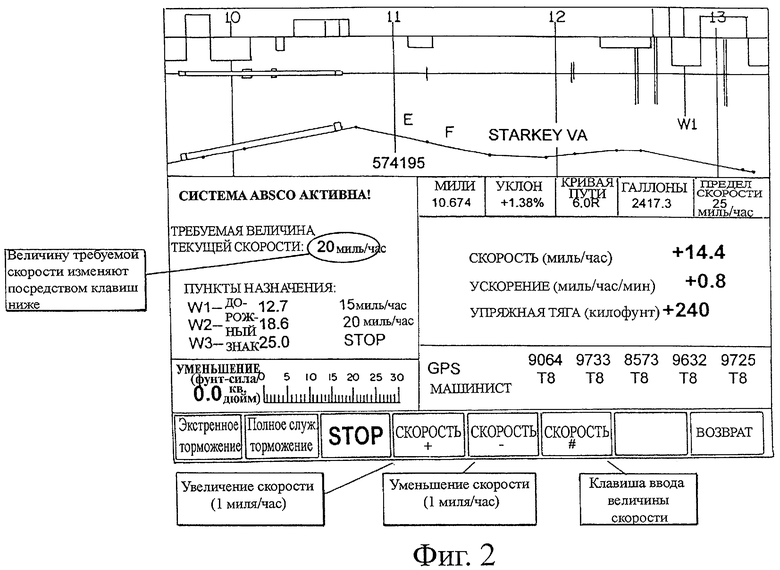
Фигура 2 показывает вид дисплея для индикации тормозного пути согласно настоящему изобретению с органами управления скоростью.
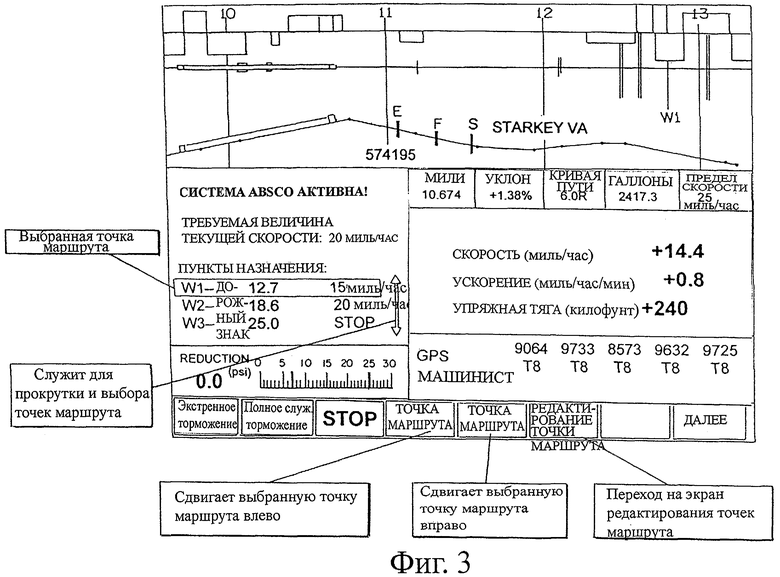
Фигура 3 показывает вид дисплея для индикации тормозного пути согласно настоящему изобретению с органами управления для настройки и редактирования точек маршрута.
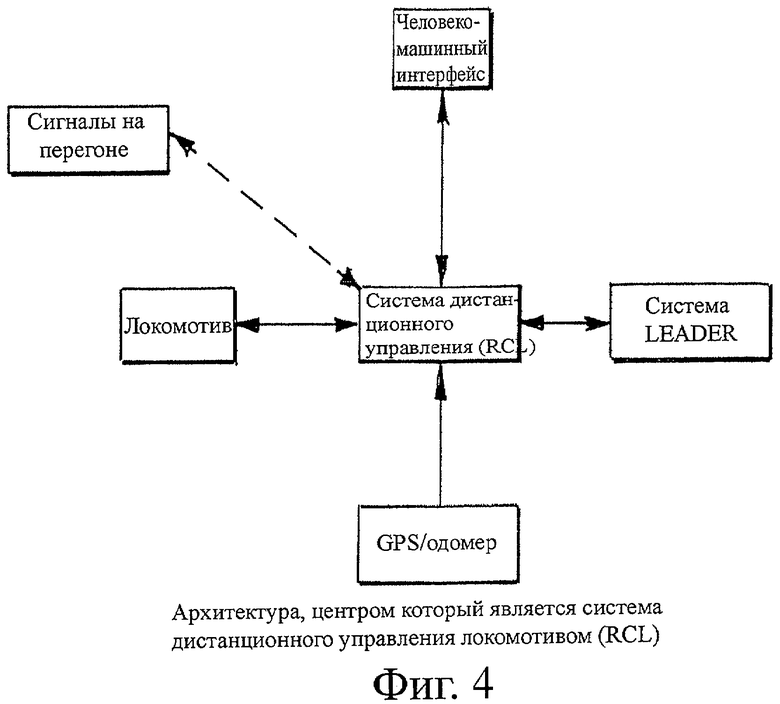
Фигура 4 представляет блок-схему архитектуры, центром которой является система дистанционного управления локомотивом (RCL).
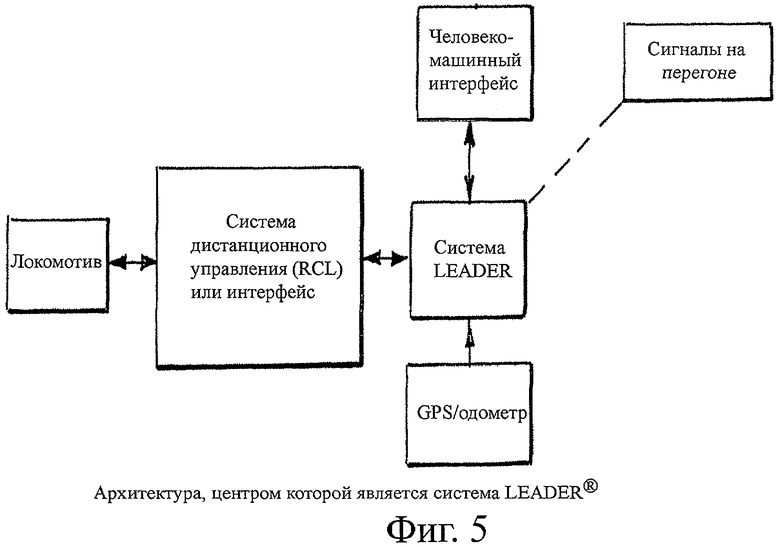
Фигура 5 представляет блок-схему архитектуры, центром которой является система LEADER®.
Фигура 6 представляет блок-схему другой архитектуры, центром которой является система LEADER®.
Подробное описание
Ниже рассмотрены различные архитектуры высокого уровня, стратегии управления и стратегии ЧМИ (HMI), которые могут быть использованы для реализации этих функций.
Требования Оператора к органам управления
Оператору для эффективного управления системой необходимы следующие входы управления:
средства для инициирования движения поезда
средства для ввода нужной величины максимальной скорости
средства для остановки поезда (Экстренной остановки ES, Полной служебной остановки FS, Остановки STOP)
средства для ввода пункта остановки
средства для перемещения в заданный пункт
средства для прецизионного определения местонахождения поезда (точная локализация)
средства для конфигурирования системы
Общая философия управления
В целом система LEADER® благодаря своим моделирующим и вычислительным возможностям в сочетании со знаниями в области составления поездов и базы данных о пунктах и путях находится в лучшем положении, чем Оператор, с точки зрения вождения поездов и управления на маршруте. Оператор принимает окончательную ответственность за движение поезда, и в частности:
Контроль движения поезда
Здесь предполагается, что Оператор только вводит пределы максимальной скорости (не обязательно связанные с предельными скоростями путей) и предоставляет системе LEADER® возможность оптимально управлять поездом. Параметры оптимизации (например, усилия в пределах поезда, время до прибытия в пункт назначения и т.п.) могут быть заданы железной дорогой. Предоставление Оператору возможности ввести указание пункта Остановки (вместо простой команды STOP), позволяет системе оптимально управлять на маршруте.
Инициирование движения поезда
При инициировании движения поезда проблема заключается в том, как выбрать слабину сцепок и как справиться с откатом (при начале движения на уклоне). Другая проблема состоит в учете ограничений рабочего цикла тормозов поезда, если движение поезда кратковременно, так что не остается достаточно времени на перезарядку тормозов. Это может потребовать повышенной мощности торможения или управления замедлением скорости. Сигнал о новом движении подают путем ввода ненулевой уставки скорости и пункта назначения, когда поезд остановлен. Система LEADER® может управлять обратным откатом, выбором слабины сцепок и ускорением поезда. Система дистанционного управления локомотивом (RCL) может обращаться к органам управления и интерфейсам локомотива.
Управление скоростью
Управление скоростью осуществляется с использованием системы управления тягой (контроллера машиниста) локомотива, автоматической тормозной системы поезда, динамических тормозов и/или независимых тормозов, как указано ограничениями, запрограммированными в системе. Система LEADER® управляет скоростью локомотива в соответствии с запрограммированными ограничениями все время с учетом максимальной скорости, указанной оператором дистанционного управления (RCO). Система может быть также запрограммирована для соблюдения максимальной скорости, допустимой для железнодорожного пути. Эта система может представлять на дисплее реальную скорость поезда, заданную оператором максимальную скорость, а также максимально допустимую скорость для железнодорожного пути. Система может оповестить оператора, если заданная им максимальная скорость больше объявленного предела скорости для данного железнодорожного пути.
В процессе управления скоростью реальная скорость поезда может изменяться и принимать любое значение между минимальной скоростью (запрограммированной в системе) и заданной оператором максимальной скоростью. В общем случае желательно минимизировать время до прибытия в пункт назначения, учитывая при этом требования железной дороги к максимальным динамическим воздействиям поезда и экономии топлива. Эти параметры можно регулировать в соответствии с требованиями железной дороги.
Управление остановкой поезда (ES, FS, STOP)
Режим ES использует немедленное Экстренное торможение. Этот режим ES не может быть отменен до полной остановки поезда. Режим FS использует немедленное Полное служебное торможение. Этот режим FS не может быть отменен до полной остановки поезда, однако степень «экстренности» торможения можно повысить, перейдя в режим ES.
В режиме STOP происходит управляемая остановка поезда с учетом заданных предельных усилий, действующих в поезде. Этот режим STOP не может быть отменен до полной остановки поезда, однако степень «экстренности» торможения можно повысить, перейдя в режим FS или ES. В процессе управляемой остановки применяют избирательное торможение, менее интенсивное, чем Полное служебное торможение. В систему можно за один раз ввести больше одного режима управляемой остановки, рассчитать результаты и представить их на дисплее.
Графический индикатор на экране дисплея профиля все время указывает предполагаемые точки остановки для указанных выше режимов ES (красный); FS (желтый) и STOP (зеленый), как показано на фиг.1-3.
Управление пунктом назначения для остановки
Рассматриваемая система предоставляет средства, помогающие оптимальному вождению поездов, от начала движения до остановки поезда в прецизионном пункте или пункте назначения. Оператор вводит пункт назначения и план поездки по маршруту, включающий в себя указания скоростей и точек маршрута (минимальный план поездки состоит из значений минимальной и максимальной скоростей и указания пункта назначения). Используя подвижные отметки остановки, оператор может выдать команду STOP в прецизионный момент, когда отметка предполагаемой точки остановки проходит через нужную точку остановки.
В альтернативном варианте оператор устанавливает курсор Пункта назначения в нужную точку остановки. После этого система планирует и управляет перемещением по наиболее эффективной траектории движения и торможения для остановки в заданном пункте. Курсор Пункта назначения можно перемещать посредством клавиш со стрелками вправо/влево или путем ввода указания дорожного знака Пункта назначения. (Заметим, что ввод дорожного знака можно использовать для грубого указания Пункта назначения, а клавиши со стрелками для точной установки.)
В процессе выполнения последовательности остановки (STOP) можно скорректировать положение Пункта назначения, регулируя положение курсора. В какой-то момент дальнейший ввод изменений оказывается невозможным, а клавиши управления курсором становятся «пустыми», указывая на эту ситуацию. В этот момент оператор по-прежнему может воспользоваться клавишами ES, FS или STOP для более быстрой остановки.
Кнопку СБРОС (CLEAR) Пункта назначения можно использовать для стирания данных о местонахождении Пункта назначения. Заметим, что в этот момент может произойти отпускание тормозов и возобновление тяги для достижения нужной скорости. На длину тормозного пути может повлиять необходимость перезаряда тормозной системы. Оператор может скорректировать или отменить данные навигации в любой момент во время поездки по маршруту, остановить поезд или вернуться в режим управления скоростью. Оператор обязан подтвердить и санкционировать перемещение в каждую последующую точку маршрута. Прецизионные перемещения потребуют время от времени внесения или поиска местонахождения поезда в базе данных путей.
Функция малой скорости (CREEP) позволит управлять перемещением поезда на короткие дистанции с применением повышенной мощности торможения при необходимости. Функция малой скорости (CREEP) позволит также обеспечить более точную остановку в нужном пункте за счет более быстрого торможения и движения с малой скоростью в конечной фазе. Этого можно добиться путем применения простого и динамического торможения или снижения тяги. Функция малой скорости (CREEP) дает возможность оператору ввести намерение остановиться на коротком отрезке пути и позволяет системе привести поезд безопасным образом в состояние, допускающее быструю остановку.
Режимы работы
Эти режимы привязаны к системе дистанционного управления (RCL), а управление работой в этих режимах осуществляет оператор дистанционного управления (RCO) (менее обученный, чем машинист). Этот оператор (RCO) может не пользоваться органами Стойки управления. Система LEADER® управляет скоростью движения поезда и местонахождением точки остановки с использованием наилучших практических методов вождения поездов и экономии топлива. Система LEADER® генерирует команды управления торможением и тягой для системы дистанционного управления (RCL), которая непосредственно приводит в действие системы на локомотиве. Система LEADER® создает ЧМИ (HMI) с представлением данных на дисплее, вводом и редактированием данных.
Некоторые команды могут поступать от системы дистанционного управления локомотивом (RCL), другие команды от ЧМИ (HMI). На панели управления (OCU) системы дистанционного управления локомотивом (RCL) расположены независимые и резервированные органы управления остановкой ES, FS, STOP, органы путевого управления, функции оповещения, звуковая сигнализация, органы управления фарами и другими функциями локомотива.
Различные варианты архитектуры показаны на фиг.4, 5 и 6.
В режиме «Круиз контроль» (Cruise Control) (Автопилот) машинист локомотива остается на вахте. Система LEADER® управляет скоростью поезда (и местонахождением точки остановки) с использованием наилучших практических методов вождения поездов и экономии топлива и генерирует команды управления торможением и тягой для интерфейса управления локомотивом (это может быть система дистанционного управления (RCL)).
В режиме Помощи машинисту (Engineer Assist) машинист локомотива остается на вахте и воздействует на все органы управления через обычный интерфейс пульта управления. Система LEADER® генерирует подсказки машинисту, помогающие оптимизировать процесс вождения поезда.
Маршрут
Маршруты представляют собой совокупности точек маршрута и контрольных пунктов. Маршрут имеет направление и название. От базовой станции можно получить и загрузить в систему описания стандартных маршрутов.
Точки маршрута
Каждой точке маршрута соответствуют местонахождение, указанное дорожным знаком (МР), и тип точки. На каждом маршруте точкам этого маршрута присвоены маркеры с нарастающей нумерацией (W1, W2 …). При добавлении или исключении точек маршрута обозначение точки может быть изменено для сохранения последовательности. Типы точек маршрута см. на фиг.3.
Действия
Система должна выполнять следующие действия:
Сигнализация/Оповещение
При приближении к точке маршрута W(x) хотите ли Вы (вставить действие) и перейти к следующей точке маршрута W(x+1)?
При приближении к пункту остановки хотите ли Вы перейти в режим малой скорости для остановки?
Если выбранная скорость выше допустимой скорости для точки маршрута или для железнодорожных путей, хотите ли Вы продолжать?
Таким образом, следует понимать, что здесь на примере описан предпочтительный вариант настоящего изобретения и что могут быть внесены другие модификации и изменения, очевидные для специалистов в данной области техники. Хотя использование системы LEADER и дисплеев обсуждалось здесь применительно к системе дистанционного управления локомотивом (RCL), изложенные процессы и дисплеи могут быть использованы на дисплее любого локомотива.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интеллектуальная система управления тормозами локомотива | 2016 |
|
RU2729496C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ СКОРОСТИ ПОЕЗДА | 2007 |
|
RU2438906C2 |
| Система передачи ответственной информации о маршрутах приема/отправления и кодах АЛС | 2018 |
|
RU2701274C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2013 |
|
RU2541585C2 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ МОТОРВАГОННОГО ПОДВИЖНОГО СОСТАВА | 2022 |
|
RU2790985C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ПОДВИЖНОГО СОСТАВА ИЛИ ЛОКОМОТИВА С ПРИБЫВАЮЩИМ ИЛИ ОТПРАВЛЯЮЩИМСЯ СО СТАНЦИИ ПОЕЗДОМ | 2004 |
|
RU2288856C2 |
| СПОСОБ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ НА ЛОКОМОТИВЕ ДЛЯ КОНТРОЛЯ ЗА ДВИЖЕНИЕМ ПОЕЗДА | 2019 |
|
RU2723513C1 |
| Сетевая система безопасности, использующая путевые сигналы для оптимизации вождения поезда по основной железной дороге | 2013 |
|
RU2644069C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2012 |
|
RU2508218C1 |
Изобретение относится к вычислительной технике. Технический результат заключается в оптимизации управления поездом. Контроллер локомотива включает в себя устройство ввода, дисплей и процессор для управления указанным дисплеем и приема входных сигналов от указанного устройства ввода. Программное обеспечение процессора определяет и управляет представлением на дисплее местонахождения поезда на путях и указанием на путях точки остановки при экстренном торможении, при полном служебном торможении или при управляемом торможении по меньшей мере в одном из вариантов. Предусмотрено также управление малой скоростью. 2 н. и 11 з.п. ф-лы, 6 ил.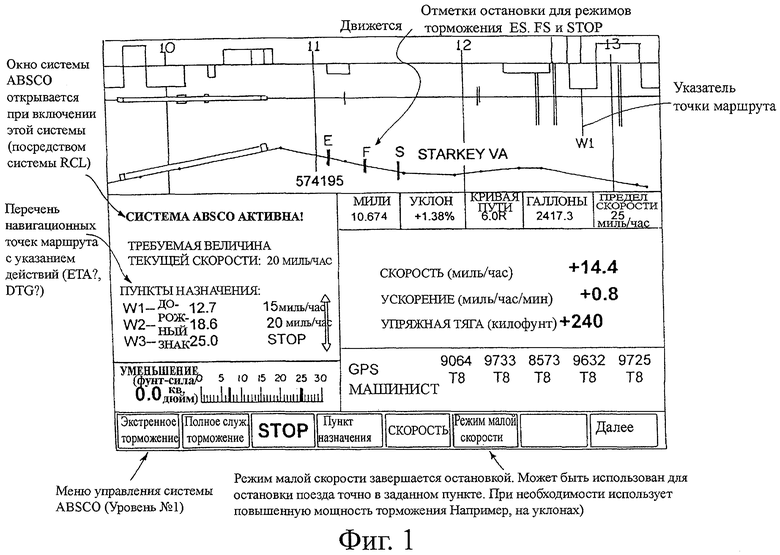
1. Контроллер локомотива, содержащий:
устройство ввода для приема входной информации от пользователя,
дисплей для предоставления, по меньшей мере, визуального вывода информации пользователю и процессор для управления дисплеем для вывода информации пользователю и приема входной информации от пользователя посредством устройства ввода; и
в котором процессор содержит и выполнен с возможностью запуска программного обеспечения, которое содержит инструкции для управления процессором для определения местонахождения поезда на путях и местонахождения на путях тормозных путей относительно текущего местонахождения поезда на путях, для, по меньшей мере, двух из видов торможения - экстренного торможения, полного служебного торможения или режима управляемого торможения; и
в котором программное обеспечение содержит инструкции для управления процессором для управления дисплеем и отображения определенного текущего местонахождения поезда на путях и местонахождения на путях тормозных путей относительно отображаемого текущего местонахождения поезда на путях, для, по меньшей мере, двух из видов торможения - экстренного торможения, полного служебного торможения или режима управляемого торможения.
2. Контроллер по п.1, в котором программное обеспечение, запущенное на процессоре, управляет процессором для получения выбора пользователя, по меньшей мере, одного режима управляемого торможения пользовательского через устройство ввода, и программное обеспечение, запущенное на процессоре, управляет процессором для управления дисплеем и отображения на дисплее отметки результата полученного выбора.
3. Контроллер по п.2, в котором программное обеспечение, запущенное на процессоре, управляет процессором для управления дисплеем и отображения отметки результата полученного сигнала режима малой скорости в ответ на прием входного сигнала режима малой скорости, выбранного пользователем через устройство ввода.
4. Контроллер по п.1, в котором программное обеспечение, запущенное на процессоре, управляет процессором для определения тормозных путей на основе заданной скорости, введенной через устройство ввода, и программное обеспечение дополнительно управляет процессором для управления дисплеем и отображения отметки результата заданной скорости.
5. Контроллер по п.4, в котором указанная заданная скорость представляет собой реальную скорость или предлагаемую скорость.
6. Контроллер по п.1, в котором программное обеспечение управляет процессором для определения текущей скорости поезда и тормозных путей на основе заданной скорости, и программное обеспечение дополнительно управляет процессором для управления дисплеем и отображения отметки определенной текущей скорости и определенных тормозных путей.
7. Контроллер по п.6, в котором программное обеспечение управляет процессором для определения тормозных путей на основе максимальной скорости введенной через устройство ввода и программное обеспечение управляет процессором для управления дисплеем и отображения введенной максимальной скорости.
8. Контроллер по п.1, в котором программное обеспечение управляет процессором для определения тормозных путей относительно текущего местонахождения поезда на путях для экстренного торможения, полного служебного торможения и управляемого торможения и программное обеспечение дополнительно управляет процессором для управления дисплеем и отображения определенных тормозных путей относительно текущего отображаемого местонахождения поезда.
9. Контроллер по п.1, в котором программное обеспечение дополнительно управляет процессором для управления дисплеем и отображения на путях отметки тормозных путей относительно введенного местоположения остановки поезда на путях для экстренного торможения, полного служебного торможения и управляемого торможения.
10. Контроллер по п.9, в котором программное обеспечение дополнительно управляет процессором для удаления отметки тормозного пути или пропуска отметки тормозного пути, если поезд прошел точку, соответствующую отметки на путях.
11. Контроллер по п.2, дополнительно включающий в себя управление тормозами и управление тягой в ответ на сигнал на указанном выходе для управления тормозами и тягой локомотива.
12. Контроллер по п.11, где этот контроллер является портативным, а указанный выход связан по радио с указанным органом управления тормозами и указанным органом управления тягой.
13. Контроллер локомотива, содержащий:
устройство ввода для приема входной информации от пользователя, устройство вывода, дисплей для предоставления, по меньшей мере, визуального вывода информации пользователю, и процессор для приема входной информации от устройства ввода, управления дисплеем и передачи выходной информации на устройство вывода; и
в котором процессор содержит и выполнен с возможностью запуска программного обеспечения, которое содержит инструкции для управления процессором для передачи на устройство вывода сигналов торможения и тяги для достижения ввода сигнала малой скорости устройством ввода.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОЕЗДА | 2002 |
|
RU2213669C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА | 2004 |
|
RU2273567C1 |

